Настоящее изобретение относится к системам радиосвязи, в частности, настоящее изобретение относится к системам и способам передачи сигналов в реальном масштабе времени через канал с изменяемыми временными характеристиками.
Известный уровень техники.
Система связи в общем случае призвана сократить время прохождения сигналов между узлами системы. Время прохождения сигналов представляет собой время, требуемое для доставки сигнала, отдетектированного в узле отправления, в узел назначения. Когда система связи передает сигналы в реальном масштабе времени, успешность работы системы часто зависит от минимизации пропускного времени. Сигналы реального времени чувствительны к действующему на них управлению или иначе связаны с физическими процессами, событиями или другими происходящими явлениями. Например, телекоммуникационные системы передают в реальном масштабе времени аудио- и, возможно, видеосигналы в аналоговой или цифровой форме. Время прохождения сигналов реального масштаба времени, будь то аналоговые или цифровые, необходимо минимизировать с целью избежать задержек, происходящих, когда абонент с одного узла связи прерывает сообщение и ждет ответа от абонента с другого узла связи.
Узлы связи системы могут работать либо в асинхронном, либо в синхронном режимах. Асинхронная работа происходит когда процессы, имеющие место в разных узлах, идут во времени независимо друг от друга. Асинхронная работа позволяет эффективно управлять разными процессами при относительно низких сложности и расходах. Однако, данные, передаваемые в процессе осуществления связи, обычно замедляются, задерживаясь в буферных устройствах, в запоминающий устройствах FIFO (алгоритм обслуживания запросов в порядке поступления) и т.д.
Когда асинхронная система организует цифровые данные реального масштаба времени в кадры, по меньшей мере один кадр данных буферизуется в промежутке между генерацией данных в одном узле и приемом данных в другом узле. Буфер на один или более кадров позволяет узлу генерирования данных генерировать кадровый обмен данных в течение длительности кадра к узлу приема данных, получать информацию об объеме данных в кадре в течение длительного кадра. Обычно узел генерирования кадров свободно может помещать кадровый объем данных в буфере согласно своему собственному расписанию и два расписания нет необходимости объединять. Однако, когда один или более кадров буферизуются, пропускное время увеличивается по меньшей мере на длительность кадра.
Буферизацию можно не производить, если допускается синхронная работа узлов системы связи. Синхронная работа происходит, когда временные диаграммы процессов, имеющих место в разных узлах, тесно связаны так, что узел генерирования данных вырабатывает данные как раз в тот момент, когда узел приема данных должен принимать данные. С другой стороны, синхронная работа не выгодна из-за сложности аппаратуры и затрат, связанных с необходимостью синхронизации пространственно разнесенных процессов.
Когда в системе радиосвязи используются узлы, размещенные на или около поверхности Земли, и узлы, размещенные на орбите вокруг Земли, ни асинхронные, ни синхронные операции не обеспечивают адекватного решения проблем пропускного времени и аппаратуры. Эти проблемы возрастают, когда узлы на орбитальных спутниках движутся относительно узлов на Земле. Значительные расстояния, на которые распространяются сигналы в системе связи на базе спутников, делают проблему с пропускным временем все более критичной, синхронную работу все более желательной. С другой стороны, движение спутников вызывает задержку распространения сигналов, передаваемых между спутниковыми станциями и станциями связи наземного базирования, которая изменяется как функция времени. Изменение задержек распространения, связанных с каналами связи между коммуникационными станциями, делает синхронные операции чрезвычайно сложными и дорогостоящими, если вообще возможными.
Изменение задержек распространения можно было бы, вероятно, не учитывать, но игнорирование задержек распространения может вызвать провалы и/или паузы в потоке данных реального времени, где задержка распространения увеличивается. Кроме того, игнорирование задержек может привести к потере данных там, где задержка распространения уменьшается. Каждая ситуация неблагоприятно влияет на физическое явление в реальном масштабе времени, к которому относится и поток данных реального времени.
Раскрытие изобретения.
Преимущество настоящего изобретения состоит в том, что предложенные усовершенствованные система и способ для сигналов связи через каналы, временные характеристики которых изменяются.
Другим преимуществом является то, что настоящее изобретение позволяет передавать сигналы реального времени по каналам, характеристики задержек распространения которых изменяются.
Еще одним преимуществом является то, что настоящее изобретение позволяет управлять узлами коммуникации системы с целью уменьшения пропускной временной задержки в сеансах связи между узлами, несмотря на изменения временных параметров каналов между узлами.
Вышеуказанные и другие преимущества настоящего изобретения достигаются способом связи через канал, который задерживает передаваемые через него сообщения на переменный временной интервал. Способ предназначен для получения синхронизирующих данных ( данных временных соотношений), которые характеризуют переменную длительность работы канала. Сигнал задерживается на величину задержки, которая соответствует синхронизирующим данным. Задержанный сигнал посылается через канал.
Краткое описание чертежей.
В дальнейшем изобретение поясняется описанием вариантов его выполнения со ссылками на сопровождающие чертежи, на которых:
фиг. 1 - изображает схему расположения элементов сотовой системы связи, в рамках которой может быть реализовано настоящее изобретение,
фиг. 2 - графически изображает относительную ориентацию зон обслуживания ячеек, которые могут создаваться системой,
фиг. 3 - временную диаграмму ТДМ (с временным уплотнением) формата кадра, используемого в одном варианте осуществления настоящего изобретения,
фиг. 4 - блок-схему коммутационной станции абонентского терминала, которая принимает участие в системе,
фиг. 5 - блок-схему алгоритма процесса приема, выполняемого абонентским терминалом,
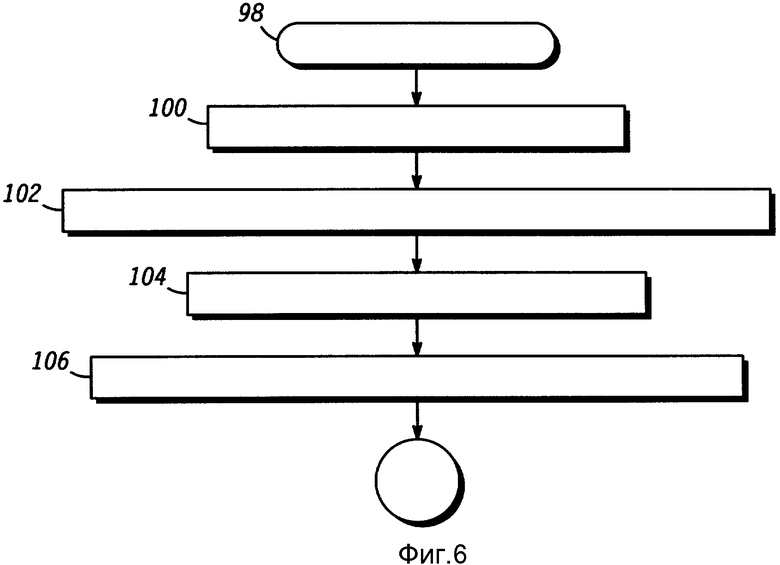
фиг. 6 - блок-схему алгоритма процесса передачи, выполняемого абонентским терминалом,
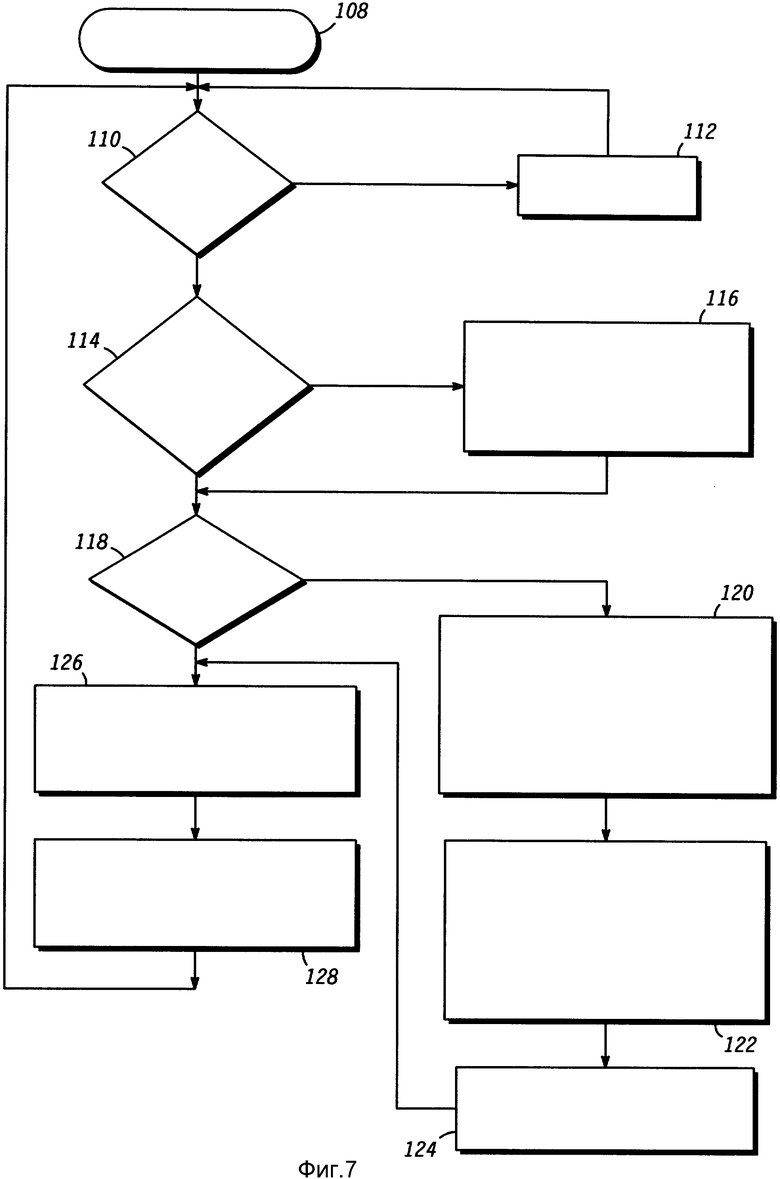
фиг. 7 - блок-схему алгоритма следующего процесса управления данными, выполняемого абонентским терминалом.
Лучший вариант осуществления изобретения.
На фиг. 1 показана общая схема, в рамках которой работает радио-телекоммуникационная система 10. Система 10 включает в себя созвездие 12 из нескольких спутников 14, размещенных на относительно низких орбитах вокруг Земли. Система 10 дополнительно включает в себя одну или более телефонных коммутационных станций (ТКС) 16. ТКС 16 располагаются на поверхности Земли и связаны радиочастотами (РЧ) каналами 18 передачи данных с ближайшими спутниками 14. Спутники 14 также связаны друг с другом через каналы 20 передачи данных. Следовательно, через созвездие 12 спутников 14 ТКМ 16 может управлять связью, обеспечиваемой для района любого размера на Земле. Однако, область, контролируемая каждой ТКС 16, обычно попадает под одну или более геополитических территорий, например одной или более стран. ТКМ 16 подключаются к коммутируемой телекоммуникационной сети общего пользования (КТСОП) 22, от которой вызовы, направляемые абонентам систем 10, могут приниматься и передаваться тому, кому их адресуют абоненты системы 10.
Система 10 также включает в себя любое число (потенциально миллионы) абонентских устройств (АУ) 24. АУ 24 может быть придана конфигурация обычного портативного оборудования радиосвязи. Система 10 приспособлена к движению АУ 24 везде на или около поверхности Земли. Однако АУ 24 могут оставаться неподвижными и система 10 удовлетворительно работает, если часть всех АУ 24 находится в стационарном режиме. АУ 24 придают такую конфигурацию, чтобы они имели связь со спутниками 14 на участках электромагнитного спектра, которые выделяются правительственными агентствами, связанными с разными геополитическими территориями. АУ 24 осуществляют связь с ближайшими спутниками 14 через каналы 26 связи.
В общем случае, систему 10 можно представить в виде сети узлов. Каждый спутник 14, ТКС 16 и АУ 24 представляют узел системы 10. Все узлы системы 10 связаны или могут быть связаны каналом передачи данных с другими узлами системы 10 через каналы 18, 20 и/или 26 связи. Кроме того, все узлы системы 10 связаны или могут быть связаны в отношении передачи данных с другими телефонными устройствами, рассеянными по всему свету, с помощью КТСОП 22 через обычные наземные базовые станции.
Услуги связи, включая вызовы, могут быть учреждены между двумя АУ 24 или между любым АУ 24 и телефонным номером КТСОП. В общем случае, каждое АУ 24 взаимодействует по управлению связью с соседним ТКС 16 через созвездие 12 в процессе установки вызова. Эти связи по управлению имеют место перед формированием коммуникационного пути между АУ 24 и другим устройством, которым может быть другое АУ 24 или телефонный номер КТСОП.
Исходя из конфигурации созвездия 12, по меньшей мере один из спутников 12 должен быть постоянно в поле зрения с каждой точки поверхности Земли. Благодаря низким околоземным орбитам, спутники 14 постоянно движутся относительно Земли. В предпочтительных вариантах осуществления спутники 14 движутся по орбитам на высоте в диапазоне около 500-1000 км над уровнем Земли. Если, например, спутники 14 размещены на орбитах, которые находятся примерно на 765 км над Землей, то спутник 14, находящийся над головой, перемещается со скоростью примерно 25000 км/ч по отношению к точке поверхности Земли. Это позволяет одному (любому) спутнику 14 оставаться над горизонтом относительно точки на поверхности Земли в течение не более десяти минут.
Электромагнитные сигналы, распространяющиеся со скоростью, близкой или равной скорости света, между узлами (станциями), базирующимися на Земле, например АУ 24 или ТКС 16, и спутниковым коммутационным узлом 14, проходят между узлами за ограниченный промежуток времени. При спутниках 14, помещенных на вышеописанные орбиты, этот ограниченный промежуток времени имеет минимальный период около 2 мсек и максимальный период 12 мсек. Длительность распространения изменяется, когда спутник 14 движется. Минимальный период имеет место, когда спутник 14 находится прямо над головой, а максимальный период имеет место, когда спутник 14 находится у горизонта. Таким образом, за период в девять минут, в течение которого спутник находится в пределах видимости с базирующейся на Земле станции 16 или 24, длительность задержки распространения сигнала, связанной с каналом 18 или 26, может уменьшиться приблизительно на 10 мс - с 12 мс максимального периода до 2 мс минимального периода. Затем, все еще в пределах этого 9-минутного периода длительность задержки распространения сигнала может увеличиться приблизительно на 10 с, с минимального периода в обратном направлении до максимального периода.
По отношению друг к другу спутники 14 остаются относительно неподвижными за исключением сходящихся и пересекающих друг друга орбит 28, возможно, в полярных областях, как показано на фиг. 1. Благодаря этому расстояние между спутниками 14, которые размещаются на смежных орбитах 28, изменяется с высотой спутников 14. Наибольшее расстояние между спутниками, находящимися на смежных орбитах 28, наблюдается на экваторе. Это расстояние увеличивается, когда спутники 14 с орбитами в смежных плоскостях приближаются к экватору.
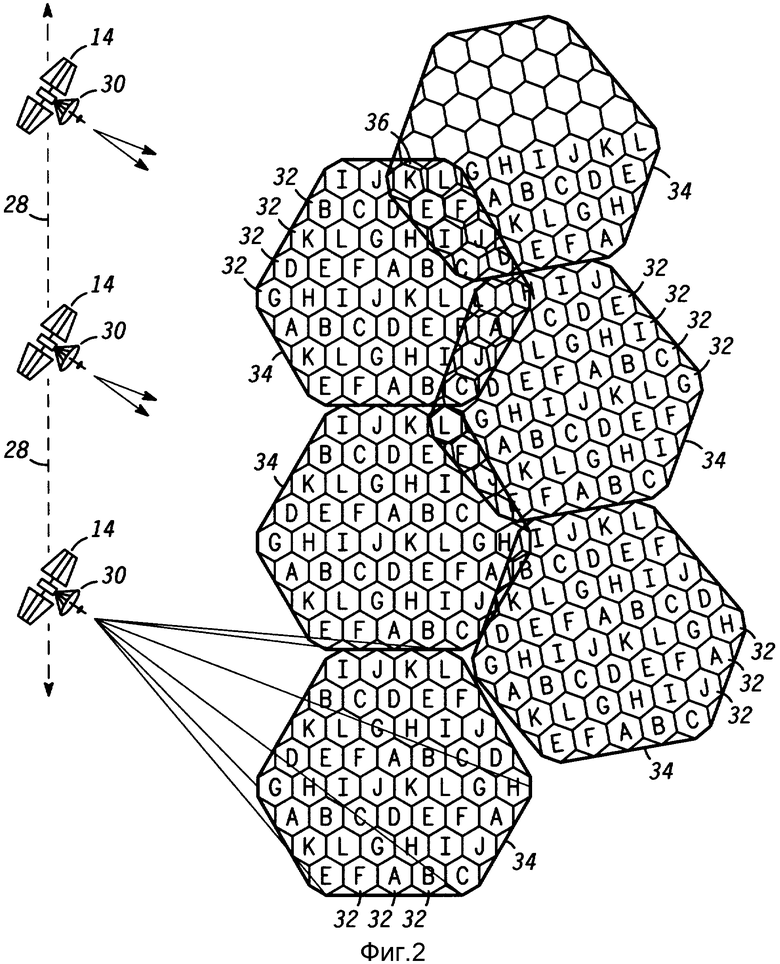
На фиг. 2 показана статическая схема расположения примерной диаграммы направленности сотовых антенн, получаемой от шести спутников 14, в которой три из шести спутников 14 последовательно размещены на одной орбите 28 созвездия 12 (см. фиг. 1), а другие три из шести спутников 14 последовательно размещены на смежных орбитах (не показаны) созвездия 12. Для ясности на фиг. 2 изображены лишь первые три из этих шести спутников 14.
Каждый спутник 14 имеет матрицу направленных антенн 30. Каждая антенная матрица 30 проектирует множество дискретных антенных отображений (диаграмм направленности) или лучей на земную поверхность под множеством разных углов от своего спутника 14. На фиг. 2 показана схема результирующих отображений лучей 32, которые спутники 14 совместно формируют на поверхности Земли. Отображение лучей 32, которые один из спутников 14 проектирует на поверхность Земли, назовем отпечатком 34. На фиг. 2 изображены отпечатки 34, каждый из которых, для примера, имеет сорок восемь лучей 32. Однако, точное число лучей 32, содержащихся в отпечатке 34, для целей настоящего изобретения не существенно. Рисунок, формируемый на Земле отдельным лучом антенны, часто называют "ячейкой". Таким образом, проекция антенных лучей формирует множество ячеек 32.
Для удобства на фиг. 2 иллюстрируются ячейки 32 и отпечатки 34 как дискретные, в общем, шестиугольной формы, без перекрытия или зазоров. Однако, для специалиста в данной области техники представляется очевидным, что эквивалентные линии, проектируемые антеннами спутников 14, реально могут иметь форму, сильно отличающуюся от шестиугольной, боковые лепестки диаграммы направленности антенны могут исказить рисунок, а некоторые ячейки 32 могут покрывать большие площади, чем другие ячейки 32, и что можно ожидать некоторого перекрытия между смежными ячейками.
Созвездие 12 спутников 14 осуществляет связь со всеми АУ 24 (см. фиг. 1) и ТКС 16, используя ограниченное пространство электромагнитного спектра. По отношению к участку спектра, предназначенного для связи с АУ 24, настоящее изобретение делит этот спектр на дискретные части, далее называемые "элементами повторного использования". Элементы повторного использования обсуждаются более подробно ниже в связи с фиг. 3, но они, в общем, могут рассматриваться как каналы связи. Спутники 14 передают принимают сигналы на/от активных ячеек 32, используя группы элементов повторного использования, назначенные соответствующим активным ячейкам 32. В предпочтительных вариантах осуществления настоящего изобретения этот спектр делится на дискретные временные интервалы и дискретные полосы частот. Желательно, чтобы каждая группа повторно используемых элементов была ортогональной ко всем другим повторно используемым группам. Другими словами, одновременная связь может иметь место в общем местоположении через каждый повторно используемый элемент каждой группы повторно используемых элементов без значительного взаимного влияния. Что является обычным в сотовых системах связи, группы повторно используемых элементов или каналы связи назначаются ячейкам через схему повторного использования, которая предохраняет смежные ячейки от использования одних и тех же элементов повторного использования. Однако, обычные элементы повторного использования используются в ячейках 32, которые для эффективного использования назначенного спектра отделены друг от друга некоторым расстоянием.
Точное число групп элементов повторного использования, на которые разделен спектр, в данном изобретении не является существенным. На фиг. 2 иллюстрируется примерное назначение двенадцати дискретных групп элементов повторного использования активным ячейкам 32. На фиг. 2 двенадцать дискретных групп повторного использования обозначены буками "А", "В", "С", "D", "E", "F, "G", "H", "I", "J", "K" и "L". Для специалиста в данной области техники представляется очевидным, что может быть использовано разное число групп элементов повторного использования и что, если используется разное число, то результирующий рисунок групп элементов повторного использования, назначенный активным ячейкам 32, будет отличаться от назначенного узора, изображенного на фиг. 2. Аналогично, для специалиста очевидно, что каждая группа элементов повторного использования может включать в себя один элемент повторного использования или любое число ортогональных элементов повторного использования и что нет необходимости в том, чтобы в разные группы элементов повторного использования было введено одно и то же число элементов повторного использования.
Когда орбиты 28 таковы, что спутники 14 остаются в пределах видимости в течение определенного времени (например, девять минут), как обсуждалось выше, отпечатки 34 аналогичным образом перемещаются через данные точки поверхности Земли примерно за то же самое время. Из-за перемещения отпечатков 34 система 10 может ожидать переключения большого числа вызовов, для которых происходит обмен сообщениями между АУ 24 и спутниками 14. Переключения будут передавать сообщения от одной ячейки 32 к другой ячейке 32 путем обмена назначениями элементов повторного использования, используемыми вызовом. Принимающая ячейка 32 может находиться или не находиться в том же самом опечатке, что и переключающая ячейка 32. Средняя ячейка будет испытывать по меньшей мере одно и, вполне возможно, намного больше переключений.
На фиг. 2 дополнительно иллюстрируется перекрытие 36, которое происходит из-за вышеупомянутого схождения орбит 28. Размер перекрытия 36 изменяется в зависимости от расположения перекрывающихся отпечатков 34. Как видно из фиг. 1 и 2, наибольшая величина перекрытия 36 получается в полярных областях Земли, тогда как небольшое перекрытие или его отсутствие получается в экваториальных областях Земли. На фиг. 2 представлены статические снимки отпечатков 34. Участок перекрытия 36, который связан с любыми двумя смежными отпечатками 34, изменяется при перемещении спутников 14 по орбитам 28.
Система 10 определяет каждую ячейку 32, генерируемую в процессе работы созвездие 12 спутников 14, как активную или неактивную. Активные ячейки 32 можно рассматривать как "включенные", а неактивные ячейки можно рассматривать как "выключенные" или "закрытые". Неактивные ячейки 32 находятся в области 36 перекрытия, а ячейки 32 динамически переключаются при облете спутников 14 по орбите вокруг Земли между активным и неактивным состояниями. Спутники 14 воздерживаются от радиопередач внутри активных ячеек 32, и любые сигналы, принимаемые на спутниках 14 от неактивных ячеек 32, игнорируются. Лишь часть ячеек 32 в области 36 перекрытия закрыта. Некоторые из ячеек 32 в области 36 перекрытия остаются активными для обеспечения зоны уверенного приема в этой области.
Процедуры, используемые системой 10 для определения - как, когда и где переключать (передавать) вызовы и когда и как переключать ячейки 32 между активным и неактивным состояниями, и какие ячейки 32 требуют переключения, выходят за рамки настоящего изобретения. Однако, когда происходят переключения и изменения статуса, управляющие сообщения передаются на действующие АУ 24, АУ 24 отвечают на эти управляющие сообщения повторной настройкой своих передатчиков и приемников на новые повторно используемые элементы, как предписывается управляющими сообщениями. Эти управляющие сообщения могут появляться во время прохождения вызовов.
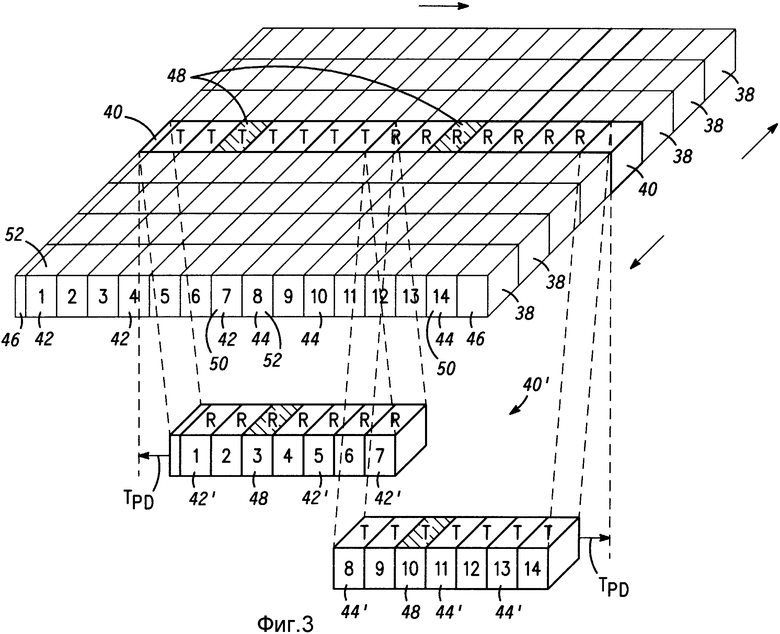
На фиг. 3 показана временная диаграмма формата ТДМ (с временным уплотнением), используемого в одном варианте осуществления системы 10 для поддержания связи между спутниковой станцией 14 и станцией 24 АУ. Как иллюстрируется в верхней части фиг. 3, весь электромагнитный спектр, назначенный системе 10 для этой связи, делится по частоте на любое число частотных каналов 38.
Вдобавок, время, за которое осуществляется связь между спутником 14 и АУ 24 делится на последовательно появляющиеся кадры 40, лишь один из которых показан на фиг. 3. Каждый кадр 40 делится на разные временные интервалы 42 передачи и временные интервалы 44 приема. Точная синхронизация временных интервалов 42 и 44 определяется относительно синхронизации кадров 40. Например, на фиг. 3 назначаются временные интервалы 42 передачи под номерами 1-7 и временные интервалы 44 приема под номерами 8-14. Для специалиста очевидно, что в кадр 40 может быть включено любое число временных интервалов 42 и 44, что число временных интервалов 42 передачи не обязательно точно равно числу временных интервалов 44 приема и что продолжительность временных интервалов 42 передачи не обязательно равна продолжительности временных интервалов 44 приема. Кадр 40 может дополнительно включать в себя временные интервалы 46, которые могут быть предназначены для других целей, например управления заголовком или кадром, сигнализации и тому подобного. В предпочтительном варианте осуществления желательно, чтобы временной кадр 40 был в диапазоне между 25 и 120 мс и еще лучше длился бы около 90 мс.
Повторно используемый элемент 48 представляет собой отдельный частотный канал 38 в течение одной конкретной пары временных интервалов 42 и 44 передачи и приема. Один повторно используемый элемент 48 показан в заштрихованном виде на фиг. 3. Хотя может быть желательным помещение временных интервалов 42 и 44 в повторно используемом элементе 48 в общем частотном канале 38, это не является обязательным. Частота повторно используемого элемента и временные назначения могут неопределенно продолжаться от кадра к кадру. Обычно один повторно используемый элемент 48 назначают АУ 24 с помощью управляющих сообщений от спутника 14, и это назначение повторно используемого элемента время от времени изменяется из-за переключений (перехода из одной ячейки в другую), закрытия лучей спутниковых антенн и т.д.
Длительность задержки распространения сигнала по каналу 26 (см. фиг. 1) между спутником 14 и АУ 24 изменяется вследствие двух факторов. Один фактор проявляется в результате движения спутника 14, которое приводит к изменению расстояния между спутником 14 и АУ 24. Поскольку спутники 14 облетают Землю при относительно постоянной скорости по соприкасающимся предсказуемым орбитам, задержка распространения появляется постепенно. Второй фактор вызван изменениями предписания повторно используемого элемента 48. Когда повторно используемый элемент изменяется, временные интервалы 42 и 44 часто резко изменяются при введении в действие новых назначений повторно используемого элемента.
Кадру 40 желательно придавать такую конфигурацию, чтобы минимизировать воздействие внезапных изменений временной диаграммы (временного распределения), что может иметь место в соответствии с переменой назначений повторно используемого элемента 48. Вместо того, чтобы перемежать временные интервалы 42 передачи временными интервалами 44 приема, временные интервалы 42 передачи располагают совместно в блоке, и временные интервалы 44 приема также располагают совместно в блоке. Вследствие этого резкое изменение временной последовательности, которое может быть результатом переназначения элемента 48 повторного использования, ограничено таким образом, чтобы быть в достаточной мере меньше длительности кадра 40. Фактически, когда функции передачи или приема отдано менее 1/2 всего времени кадра, как иллюстрируется на фиг. 3, фактор резкого изменения временной последовательности ограничен величиной менее 1/2 кадра. При этих обстоятельствах максимально возможная величина резкого (внезапного) изменения временной последовательности равна разности или длительности промежутка между последним появившимся временным интервалом 50 и первым появившимся временным интервалом 52 для соответствующих временных интервалов передачи 42 и приема 44.
В предпочтительном варианте осуществления системы 10 разбиение на кадры и управление электромагнитным спектром желательно контролировать с помощью спутников 14. АУ 24 приспосабливают свои операции к встречным требованиям, предъявляемым спутниками 14. Соответственно АУ 24 используют кадр 40', которому придана такая конфигурация, чтобы он был последовательным с кадром 40. Временные интервалы 42 передачи становятся временными интервалами 42' приема, когда приняты на АУ 24. Временные интервалы 42' приема получают из соответствующих временных интервалов 42 передачи на спутнике 14 с задержкой ТРД распространения из-за задержки распространения между спутником 14 и АУ 24. Как было показано выше, ТРД изменяется в пределах между заданными минимальной и максимальной длительностями из-за движения спутника. Аналогично, временные интервалы 44' передачи в АУ кадре 40' соответствует временным интервалам 44 приема в спутниковом кадре 40. Временные интервалы 44' передачи передаются или посылаются с АУ 24 с задержкой распространения ТРД перед их соответствующими временными интервалами 44 приема в кадре 40. Из-за ТРД длительность промежутка между соответствующими временными интервалами 44' и 42' меньше, чем промежутка между соответствующими временными интервалами 44 и 42 на спутнике 14 приблизительно на двукратную ТРД.
В качестве примера, для конкретного элемента 48 повторного использования, который заштрихован на фиг. 3 АУ 24 принимает данные лишь в течение временного интервала "3" кадра 40'. Следовательно, АУ 24 определяет (задает) кадр 40' таким образом, чтобы его временной интервал "3" имел ТРД после временного интервала "3" на спутнике 14. При таком способе данные, передаваемые со спутника 14, приходят как раз во-время, чтобы быть принятыми на АУ 24 в течение его временного интервала "3". Аналогично, спутник 14 принимает данные от АУ 24 лишь в течение временного интервала "10" кадра 40. Следовательно, АУ 24 передает эти данные в течение временного интервала "10", а временной интервал "10" на АУ 24 появляется на ТРД раньше временного интервала "10" на спутнике 14. Эти данные, посылаемые перед временным интервалом 44 приема, назначенным элементу 48 повторного использования, приходят как раз в такое время, чтобы быть принятыми на спутнике 14.
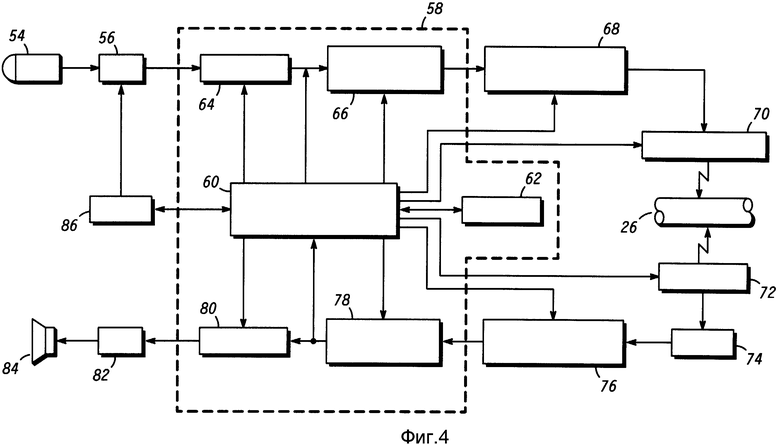
На фиг. 4 показана блок-схема узла (станции) наземного базирования, например АУ 24, системы 10. В варианте осуществления настоящего изобретения на фиг. 4 АУ 24 является телекоммуникационным устройством, которое получает аналоговые аудиосигналы реального времени путем наблюдения за физическим звуковым явлением, преобразует аудиосигнал в поток данных цифровых сигналов реального масштаба времени и передает поток сигналов данных на спутник 14. В этой точке система 10 передает поток сигналов данных на место предполагаемого назначения. АУ 24 принимает поток данных сигналов реального времени от места назначения и системы 10 через спутник 14, преобразует этот поток данных в аудиосигналы реального времени и преобразует аудиосигнал в звуковое физическое явление (звук).
Микрофон 54 генерирует звуковой сигнал реального времени. Для специалиста в данной области техники представляется очевидным, что в альтернативных вариантах осуществления АУ 24 может получать сигнал реального времени от других источников. Аналого-цифровой (А/Д) преобразователь 56 подключается к микрофону 54 и дискретизирует аудиосигнал реального времени для генерирования потока цифровых сигналов данных. А/Д 56 производит дискретизацию на постоянном уровне дискретизации, чтобы уменьшить сложности, связанные с обработкой сигналов данных, но это не является существенным. Контроллер 58 имеет вход данных, который подключается к А/Д 56. Контроллер 58 содержит процессор 60, который соединен с запоминающим устройством 62. Вокодер 64 управляется процессором 60 и принимает сигналы данных от А/Д 56. Блок 66 защиты от ошибок также управляется процессором 60 и принимает сигналы данных от вокодера 64. Вдобавок, любые управляющие данные, генерируемые процессором 60, комбинируются с сигналами данных из вокодера 64 и в блоке 66 защиты от ошибок.
Выход блока 66 защиты от ошибок, который также является выходом контроллера 58, подключен к схеме 68 переменной задержки передачи. Схема 68 задержки может быть выполнена как схема памяти, сдвиговый регистр, буфер, схема обратного магазинного типа или другое устройство запоминания, известное специалисту в данной области техники. Схема 68 задержки имеет вход управления длительностью, который соединен с процессором 60 контроллера 58. Через этот вход контроллер 58 задает промежуток времени, на который схема задержки 68 задерживает данные, помещаемые в нее контроллером 58.
Схеме 68 задержки придана такая конфигурация, чтобы ввести задержку, которая связана с изменениями задержки распространения, обсуждавшимися выше. Схема 68 задержки может также быть выполнена такой, чтобы вводить задержку для компенсации сдвигаемого использования временных интервалов, что обсуждалось выше. В частности, схема 68 задержки осуществляет максимальную задержку, эквивалентную максимальному изменению в постепенной задержке распространения, вызываемом движением спутника 14, плюс максимальное внезапное изменение, вызванное переназначениями элемента повторного использования. Так, максимальная задержка, осуществляемая схемой 68 задержки, меньше кадра 40 (см. фиг. 3). Конечно, реальная задержка будет иметь длительность между нулем и этой максимальной задержкой, как задается процессором 60. Выход схемы 68 задержки соединен с передатчиком 70, который посылает модулированный РЧ-сигнал в канал 26 для передачи на спутник 14. Процессор 60 контроллера 58 подключен к передатчику 70 для управления элементами 48 повторного использования (см. фиг. 3), в которых выполняются передачи.
Приемник 71 соединен с каналом 26 через антенну (не показана) для детектирования сигналов, передаваемых спутником 14. Приемник 72 соединен с демодулятором или демодом 74, который извлекает данные из принимаемых сигналов. Приемник 72 также соединен с процессором 60, так что процессор 60 может управлять элементами 48 повторного использования (см.фиг. 3), в течение которых принятые сигналы вводятся. Демод 74 соединен с приемной схемой 76 переменной задержки. Схема 76 задержки работает аналогично схеме 68 задержки, описанной выше, за исключением того, что она задерживает принятые данные, а не данные, предназначенные для передачи на спутник 14. Вход управления длительностью схемы 76 задержки подключен к контроллеру 58, в частности к блоку 78 защиты от ошибок контроллера 58. Блок 78 защиты от ошибок управляется процессором 60. Выход принятых данных блока 78 защиты от ошибок расщепляется на сигнальные данные и управляющие данные. Управляющие данные передаются на процессор 60, тогда как сигнальные данные подаются на дешифратор 80, который также управляется процессором 69. Выход дешифратора 80 соединен с цифроаналоговым преобразователем (Д/А) 82, который преобразует сигнальную часть данных принятого цифрового потока данных в аналоговый звуковой сигнал. Д/А 82 соединен с преобразователем 84, например громкоговорителем или тому подобным, для преобразования аналогового аудио (звукового) сигнала в звук.
Таймер 86 соединен с процессором 60, чтобы помочь процессору 60 контролировать ход времени. Таймер 86 также удобно соединен с А/Д 56 и Д/А 82 для управления дискретизацией аналоговых сигналов и преобразования цифровых данных в аналоговые сигналы. Хотя это не показано, таймер 86 может в некоторых вариантах осуществления соединяться прямо со схемами 68 и 76 задержки, чтобы помочь задержать данные на величину, задаваемую процессором 60.
В предпочтительном варианте осуществления настоящего изобретения вокодер 64 выполняет обычную функцию аудио-сжатия для создания потока пакетов данных, а дешифратор 80 выполняет функцию дополняющего расширения на пакетах данных. Блок 66 защиты от ошибок дешифрирует пакеты данных обычным способом для определения степени детектирования и коррекции ошибок, а блок 78 защиты от ошибок выполняет дополнительную операцию извлечения данных коррекции ошибок из принятых пакетов и коррекции ошибок в пакетах. Хотя вокодер 64, блок 66 защиты от ошибок, блок 78 защиты от ошибок и дешифратор 80 показаны на фиг. 4 в виде отдельных блоков, для специалиста в данной области техники представляется очевидным, что их функции могут быть включены в процессор 60 в некоторых вариантах данного изобретения или что устройства обработки цифровых сигналов, управляемые процессором 60, могут быть адаптированы к этим функциям.
Запоминающее устройство 62 содержит данные, которые служат в качестве команд процессору 60 и которые при исполнении процессором 60 заставляют АУ 24 выполнять операции, которые были описаны ниже. Вдобавок, запоминающее устройство 62 содержит переменные, таблицы и базы данных, которые обрабатываются благодаря работе АУ 24. В частности, каждое АУ 24 представляет собой программируемое устройство, которое обрабатывает (использует) символы, назначенные ему путем программирования на основе сохраняемого в памяти 62 программного обеспечения и выполняемые процессором 60.
Для специалиста в данной области техники на основе данного описания представляется очевидным, что, хотя работа АУ 24, проиллюстрированная на фиг. 4, описана для обмена звуковой информацией, это не является существенным, и можно использовать любую форму аналоговой или цифровой информации для ввода/вывода. Факсимильные, видео и компьютерные данные также подлежат передаче примерами.
На фиг. 5 - 7 показаны блок-схемы алгоритмов операций, выполняемых АУ 24 в рамках настоящего изобретения. В предпочтительных вариантах осуществления настоящего изобретения большое число АУ 24 в системе 10 выполняют, по существу, одни и те же операции. Так, фиг. 5 - 7 можно рассматривать как относящиеся ко всем АУ 24. Вдобавок, специалисту в данной области техники понятно, что ничто не мешает АУ 24 выполнять другие операции, которые не связаны с настоящим изобретением. Кроме того, очевидно, что АУ 24 выполнять другие операции, которые не связаны с настоящим изобретением. Кроме того, очевидно, что АУ 24 не обязательно должно выполнять операции, описанные на фиг. 5 - 7, в каком-либо конкретном порядке.
Например, фиг. 5 - 7 относятся к операциям, которые выполняются при передаче данных реального времени. В смысле телекоммуникации эти процессы выполняются, когда имеется вызов (запрос). Для специалиста в данной области техники представляется очевидным, что АУ 24 может вначале захватить сигнал, передаваемый спутником 14, и взаимодействовать при передаче данных с системой 10 через спутник 14 для осуществления вызова. В случае такого захвата и сообщения об установке вызова АУ 24 может принимать "синхронизирующие данные" со спутника 14. Эти синхронизирующие данные информируют АУ 24 об элементах 48 повторного использования (см. фиг. 3), назначенных АУ 24 для поступающего вызова. Как было показано выше, определение повторно используемого элемента 48 включает в себя определение пары временных интервалов 42' и 44' приема и передачи (см. фиг.4) наряду с определением частот. Эта информация о назначении повторно используемых элементов используется для управления передатчиком 70 и приемником 72 (см. фиг.4) описанным в заявке способом, позволяющим установить связь.
Кроме того, синхронизирующие данные, принимаемые от спутника 14, определяют период времени, требуемый для распространения сигнала по каналу 26 (см. фиг. 1 и 4). Это определение может, но необязательно должно, быть точным определением задержки распространения. Эти синхронизирующие данные задержки распространения могут, например, просто информировать АУ 24 об изменениях, которые надо сделать в их текущем виде для приема и передачи временных интервалов 42' и 44' так, чтобы последующие сообщения более близко были согласованы с синхронизирующими ограничениями, налагаемыми кадром 40 (см. фиг.3), управляемым на спутнике 14. Операция первоначального захвата (приема) может обеспечить грубую синхронизацию, а обратная связь, возникающая в результате взаимодействия со спутником 14 и вносящая изменения в соответствии с указанными синхронизирующими данными задержки распространения, заставит АУ 24 и спутник 14 осуществлять связь друг с другом в пределах жестко контролируемых ограничений синхронизации наподобие тех, что описаны выше в связи с фиг.3. Накопление изменений синхронизации, принятых от спутника 14, будет определять общую задержку распространения.
Кроме того, когда вызов установлен и данные реального времени передаются через канал 20 (см. фиг. 1 и 4), спутник 14 выдает поток синхронизирующих данных на АУ 24 в продолжение вызова. Этот поток синхронизирующих данных информирует АУ 24 об изменениях в синхронизации, которые необходимо сделать в его временных интервалах 42' и 44' приема и передачи для компенсации изменения задержки распространения, вызванной движением спутника 14. Вдобавок, этот поток синхронизирующих данных информирует АУ 24 о переназначениях повторно используемых элементов. Нет необходимости в том, чтобы это поток синхронизирующих данных шел по направлению к АУ 24 постоянно. Скорее эти синхронизирующие данные будут посылаться на АУ 24 по мере необходимости, а необходимость определяет спутник 14.
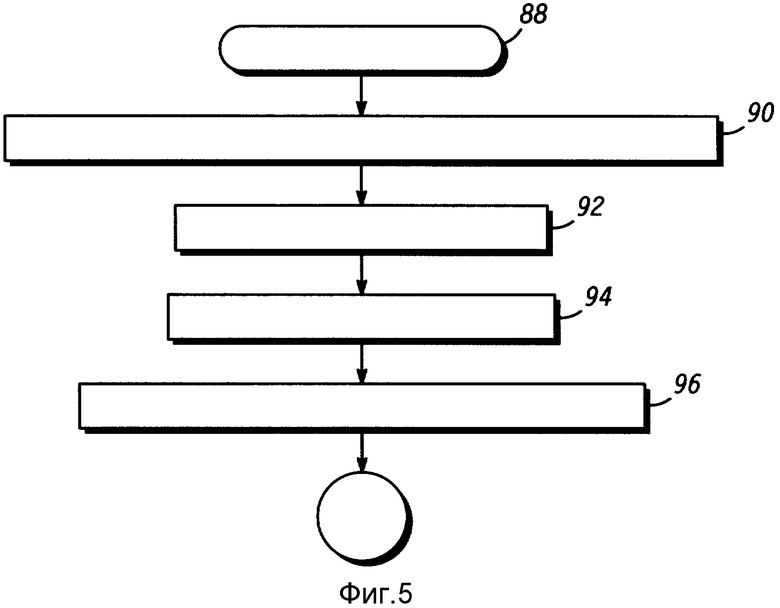
На фиг. 5 показана блок-схема алгоритма задач, выполненных АУ 24 во время операции 88 приема. В общем случае АУ 24 выполняет операцию 88 по приему и обработке данных, включая управляющие от спутника 14 в реальном времени. Соответственно, на этапе выполнения задачи 90 принимается и демодулируется пакет данных. Этот пакет данных может представлять собой весь объем данных, принятых в течение временного интервала 42' (см. фиг.3). Задача 90 выполняется, в основном, приемником 72 и демодулятором 74 (см. фиг.4).
Когда на этапе выполнения задачи 90 принимается и демодулируется пакет данных, данные помещаются в схему 76 переменной задержки (см. фиг.4) и задерживаются в ней, как показано в задаче 92. Однако, хотя задача 92 задерживает данные, она продолжает принимать и демодулировать последующие принимаемые данные. Длительность задержки определяется процессором 60 (см. фиг. 4) в соответствии с операцией, описываемой ниже со ссылкой на фиг. 7. В предпочтительных вариантах осуществления задержка меньше длительности кадра. Далее, задача 94 дешифрирует пакет данных. Однако, после того, как каждый пакет задержан на конкретную величину, задача 92 повторяется для последующего пакета данных. Процедуры коррекции ошибок выполняются в блоке 78 (см. фиг. 4), управляющие данные детектируются и передаются в процессор 50, а оставшиеся сигнальные данные дешифрируются в дешифраторе 80 (см. фиг. 4). Желательно, чтобы сигнальные данные кодировались на базе постоянной частоты дискретизации, чтобы упростить процесс дешифрации. После задачи 94 пакеты данных передаются задаче 96, где они преобразуются в надлежащую аналоговую форму и, возможно, преобразуются в надлежащую аналоговую форму и, возможно, преобразуются в физическую величину, например, звук. Задача 96, в основном, выполняется Д/А 82 и преобразователем 84.
На фиг. 6 показана блок-схема алгоритма задач, выполняемых АУ 24 в течение процесса 96 передачи. В общем случае АУ 24 выполняет процесс 96 по передаче, в основном, данных реального времени на спутник 14. Во-первых, процесс 98 генерирует сигнальные данные путем превращения в цифровую форму сигнала реального времени, как показано в задаче 100. Эта задача выполняется, в основном, А/Д 56(см. фиг. 4). Эту дискретизацию желательно проводить при постоянной частоте дискретизации, чтобы процессы дешифрации могли оставаться, насколько это возможно, простыми, надежными и недорогими. Когда задача 100 дискретизировала блок данных, который может быть кадровым содержанием данных или несколько меньшей порцией данных, процесс 98 выполняет задачу 102. Однако затем задача 100 может повторяться для следующего блока данных.
Задача 102 собирает один или более блоков преобразованных в цифровую форму сигнальных данных реального времени от задачи 100 и кодирует эти данные в пакет. Задача 100 выполняется, в основном, вокодером 64 и блоком 66 защиты от ошибок (см. фиг. 4). Пакет данных может дополнительно включать в себя управляющие данные, подлежащие передаче от АУ 24 на спутник 14 и систему 10. Затем задача 102 передает свой вновь сформированный пакет данных в задачу 104. Однако, процесс 98 может немедленно повторить задачу 102 для кодирования одного или более последующих блоков данных.
Задача 104 задерживает пакет данных, полученных от задачи 102, на промежуток времени, который вычисляется процессором 60 (см. фиг. 4), способом, описываемым ниже в связи с фиг.7. В предпочтительном варианте осуществления этот промежуток времени меньше длительности кадра. Задача 104 выполняется, в основном, схемой 68 переменной задержки (см. фиг. 4). После задачи 104 задача 106 посылает задержанный пакет данных в канал 26. Задача 106 выполняется, в основном, передатчиком 70 (см. фиг. 4).
На фиг.7 показана блок-схема алгоритма следующей операции 108 управления данными, выполняемого АУ 4. Операция 108 выполняется, в основном, процессором 60 (см. фиг. 4). Операция 108 выполняется в непрерывном цикле, когда данные принимаются от спутника 14. При поступлении фрагмента данных и предпочтительно после того, как блок 78 защиты от ошибок (см. фиг. 4) выполнит коррекцию ошибки, операция 108 выполняет запросную задачу 110. Фрагмент данных может представлять собой блок сигнальных данных, управляющую команду или весь пакет данных конкретного типа. Задача 110 определяет, является ли фрагмент данных управляющими данными. Если задача 110 определяет, что фрагмент данных не является управляющими данными, то фрагмент данных считается сигнальными данными реального масштаба времени, операция 108 выполняет задачу 112. Задача 112 дешифрирует сигнальные данные, как указано в задаче 94 операции 88 (см. фиг. 4). После задачи 112 программа возвращается к задаче 110.
Когда задача 110 определяет, что фрагмент данных является управляющими данными, то управление программой выполняет запросную задачу 114. Вышеописанные синхронизирующие данные являются управляющими данными. Таким образом, когда поступает фрагмент данных из вышеприводимого потока синхронизирующих данных, вызывается задача 114. Задача 114 определяет, показывают ли управляющие данные, что АУ 24 получило данные задержки распространения. Как было показано выше, данные задержки распространения информируют АУ 24 о задержке распространения сигналов, проходящих через канал 26 (см. фиг. 1 и 4). Такие данные задержки распространения могут непосредственно показывать задержку распространения или могут дать команду АУ 24 изменить его описания (определения) для временных интервалов 42' и 44' приема и передачи (см. фиг. 3) на заданное приращение.
Когда обнаружены данные задержки распространения, задача 116 вычисляет коэффициент "постепенной" задержки. Постепенный коэффициент задержки устанавливают равным заданной максимальной величине задержки распространения, связанной с каналом 26, минус текущая задержка распространения, указываемая только что полученными данными задержки распространения. Таким образом, постепенный коэффициент задержки равен нулю, когда реально испытывается максимально возможная задержка распространения, и равен максимальной величине, когда реально испытывается минимально возможная задержка распространения. Хота это не показано, задача 116 может также управлять передатчиком 70 и приемником 72 (см. фиг. 4) в соответствии с только что полученными данными задержки распространения.
После задачи 116 или когда задача 114 определит, что данные задержки распространения не получены, управление программой выполняет запросную задачу 118. Задача 118 определяет, получены ли синхронизирующие данные временного интервала. Такие данные могут принять форму переназначения элемента повторного использования. Когда обнаружены данные временного интервала, задача 120 вычисляет коэффициент "резкой" задержки для передачи данных. Указанный коэффициент равен длительности временного интервала 44' передачи, умноженной на разность между последним появившимся временным интервалом 50 передачи (см. фиг.3) и текущим временным интервалом передачи. Текущий временной интервал передачи идентифицируется только что полученными данными временного интервала. После задачи 120 задача 122 вычисляет коэффициент "резкой" задержки для приема данных. Этот коэффициент задержки равен длительности временного интервала 42' приема, умноженной на разность между последним появившимся временным интервалом 50 приема (см. фиг.3) и текущим временным интервалом приема. Текущий временной интервал приема идентифицируется только что полученными данными временного интервала.
После задачи 122 задача 124 синхронизирует кодирование, выполняемое вокодером 64 и блоком 66 защиты от ошибок (см. фиг.4) с первым появившимся временным интервалом 44' передачи. Как обсуждалось выше, вокодер 64 и блок 66 защиты от ошибок генерирует сигнальные (информационные) данные путем обработки блоков или пакетов данных. Задача 124 определяет, когда должно произойти начало этих блоков или пакетов. С помощью синхронизации генерирования пакетов сигнальных данных с первым появившимся временным интервалом 44' передачи контроллером 58 (см. фиг.4) генерируется пакет данных в момент, выбранный с учетом того, чтобы после задержки в схеме 68 переменной задержки (см. фиг.4) и передачи через канал 26 пакета данных, он прибывал на спутник 14, когда на спутнике 14 появляется временной интервал 44 приема (см. фиг. 3). Эта задача синхронизации позволяет АУ 24 опустить дополнительную буферизацию данных, которая ухудшила бы пропускную способность данных.
После задачи 124 или когда задача 118 определит, что не получено никакого временного интервала, операция 108 выполняет задачу 126. Задача 126 вычисляет общую задержку для приложения к данным, предназначенным для передачи. Длительность такой задержки передачи равна сумме коэффициента (показателя) постепенной задержки, вычисленного выше в задаче 116, плюс коэффициент "резкой" задержки, вычисленный выше в задаче 120. Затем задача 126 регулирует вход управления длительностью схемы 68 переменной задержки (см. фиг.4) в соответствии с указанным вычислением. Для специалиста в данной области техники представляется очевидным, что когда АУ 24 встречается с потоком синхронизирующих данных, длительность задержки, вводимой схемой 68 переменной задержки, изменяется в ответ на синхронизирующие данные.
Далее задача 128 вычисляет общую задержку для приложения ее к принимаемым данным. Длительность данной задержки приема равна сумме коэффициента "постепенной" задержки, вычисленного выше в задаче 116, плюс коэффициент "резкой" задержки, вычисленный выше в задаче 122. Затем задача 128 регулирует вход управления длительностью схемы 76 переменной задержки (см. фиг.4) в соответствии с этим вычислением. Для специалиста в данной области техники очевидно, что когда АУ 24 сталкивается с потоком синхронизирующих данных, длительность задержки, вводимой схемой 76 переменной задержки, изменяется в ответ на синхронизирующие данные.
После задачи 128 управление программой возвращается в цикле назад к задаче 110 с целью произвести оценку следующего фрагмента данных, с которым имеет дело АУ 24. АУ 24 неопределенно продолжает свои операции в программном цикле, иллюстрируемом на фиг. 7.
В итоге, настоящее изобретение предлагает улучшенные систему и способ передачи сигналов через каналы, временные характеристики которых изменяются. Такие сигналы могут переносить данные в реальном масштабе времени. Данные реального времени могут получаться при дискретизации или генерироваться при постоянной частоте другим способом. Поток данных реального масштаба времени, пропускаемый через канал с изменяющимися временными характеристиками, свободен от провалов, пауз и повторов благодаря тому, что изменения синхронизации компенсируются схемами переменной задержки, которые программируются на задержку данных на заданную величину. Настоящее изобретение позволяет управлять узлами системы связи с целью уменьшения временной задержки при прохождении сообщений между узлами независимо от изменений временных характеристик каналов между узлами. Задержка прохождения уменьшается за счет операции синхронизации или процессов, происходящих на разных узлах.
Настоящее изобретение выше описано со ссылкой на предпочтительные варианты осуществления. Однако, для специалиста в данной области техники представляется очевидным, что в данные предпочтительные варианты осуществления могут быть внесены изменения и модификации без выхода за пределы настоящего изобретения. Например, хотя вышеприведенное описание направлено на узел с абонентским устройством системы связи, при небольших изменениях на уровне известных технических решений, оно применимо к другим узлам (станциям) наземного базирования системы. Аналогичным образом вышеприведенное описание относится к схеме переменной задержки, размещенной на узлах абонентских устройств системы. Однако для специалиста в данной области техники очевидно, что схема переменной задержки компенсирует характеристики канала между узлами и что схема переменной задержки может быть установлена на каждом конце канала. Кроме того, хотя настоящее изобретение актуально, в частности, в связи с передачей данных реального времени, ничто не мешает использовать его в отношении команд, сигнализации или других типов данных. Эти и другие варианты и модификации, которые очевидны специалисту в данной области техники, находятся в сфере действия настоящего изобретения.
Изобретение относится к системам связи и может быть использовано при передаче сообщений через канал с изменяемыми временными характеристиками. Достигаемый технический результат - уменьшение временной задержки при прохождении сообщений между узлами системы связи назависимо от изменений временных характеристик каналов между узлами. Сущность изобретения состоит в том, что данные, подлежащие передаче через канал, задерживаются в схеме переменной задержки, причем длительность задержки изменяется в соответствии с синхронизирующими данными. Как постепенное, так и резкое изменение синхронизации параметров канала компенсируется схемами переменной синхронизации. 3 с. и 3 з.п. ф-лы, 7 ил.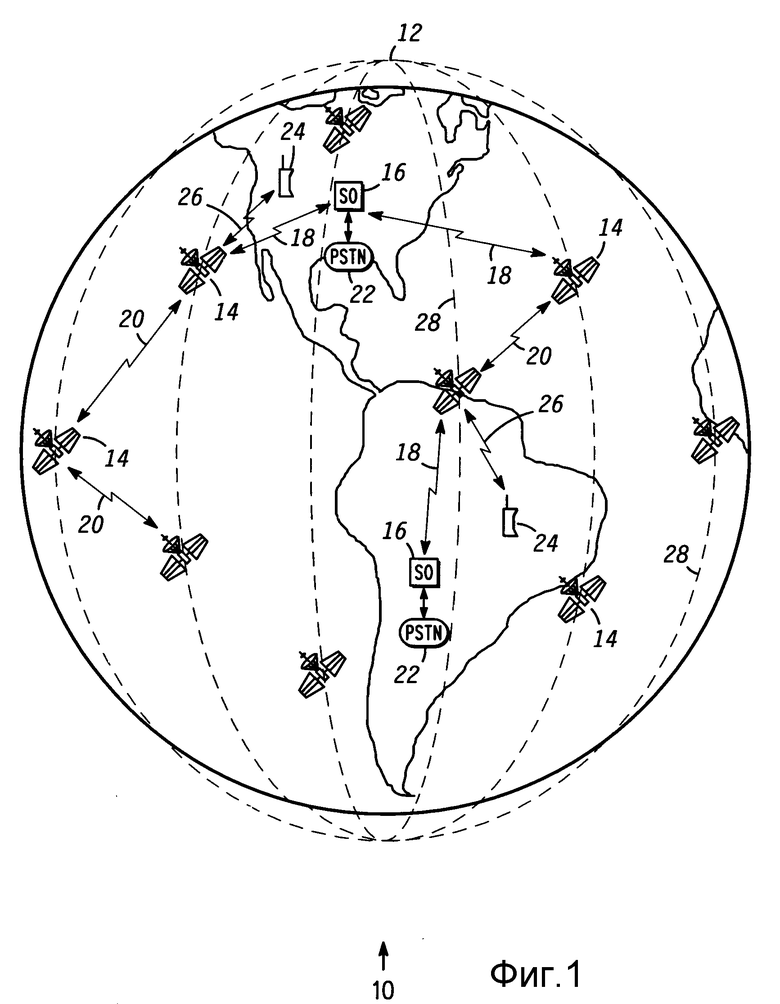
| US, 5249174 A, 28.09.93. |
