Настоящая заявка является частичным продолжением заявки "Система связи с многократным использованием спектра на сферической поверхности" авторов Yih G. Jan и Kenneth M.Peterson, поданный 6 июля 1993 года, назначение которой отвечает назначению настоящей заявки.
Настоящее изобретение относится к заявке "Управление ячейками спутниковых систем" автора Pullman и др., назначение которой отвечает назначению настоящей заявки и которая используется здесь для ссылок.
Область техники.
Настоящее изобретение относится, главным образом, к системам связи. В частности, настоящее изобретение относится к системам, в которых области, внутри которых устанавливают связь, делятся на ячейки, и которые многократно используют спектр на определенных ячейках.
Известный уровень техники
В традиционных сотовых системах связи используется схема многократного использования частот. Вообще говоря, антенны системы устанавливают в отдаленных друг от друга местах расположения. Каждая антенна системы, наряду с мощностью передатчика, чувствительностью приемника и географическими характеристиками, определяет ячейку. Ячейка - это географическая зона на (и у) поверхности Земли, внутри которой может осуществляться связь через абонентское устройство, имеющее заранее определенные рабочие характеристики, и через антенну ячейки.
Один пример системы сотовой связи, которая делит поверхность Земли на множество ячеек или "контуров диаграммы направленности", раскрыт в публикации WO91-086621. В этой публикации система пейджинговой связи содержит по меньшей мере одну наземную базовую станцию для связи с одним или более спутниками и с одной или более станциями управления. Система включает в себя также станцию управления, приспособленную для определения режима подачи пейджинговой информации для направления подачи пейджинговой информации на один или более наземные приемники, находящейся в пределах контура диаграммы направленности. В сотовой системе, которая эффективно использует выделенный ей спектр, антенны системы расположены так, чтобы минимизировать перекрытие между их соответствующими ячейками и уменьшить зазоры между ячейками.
Спектр, выделяемый обычной сотовой системе, делится на небольшое число дискретных участков, обычно частотных диапазонов. Каждой ячейке выделяется только один из частотных участков, и каждая ячейка предпочтительно окружается ячейками, в которых используются другие дискретные участки спектра. Для связи внутри ячейки используется только дискретный участок спектра, выделенный ячейке, а взаимное влияние между связями, осуществляемыми в других соседних ячейках, минимизируется, поскольку связи в таких соседних ячейках используют различные участки спектра. Ячейками параллельных каналов являются ячейки, которые многократно используют один и тот же дискретный участок спектра. Чтобы минимизировать взаимное влияние, схема многократного использования частот предусматривает разнесение ячеек параллельных каналов на минимальное, заранее определенное расстояние.
В сотовых системах связи, в которых антенны размещаются на орбитах движения вокруг Земли, имеются частные проблемы, связанные с распределением дискретных участков выделенного спектра разным ячейкам. Из-за приблизительно сферической формы Земли, ячейки, которые не перекрываются в одном районе Земли, таком, как например, экватор, могут очень хорошо перекрываться в других регионах, таких как например, полярные области. Когда ячейки перекрываются, ячейки параллельных каналов, которые перекрывающиеся ячейки разделяют, размещены ближе, чем допускается схемой многократного использования спектра. Взаимное влияние между связями, осуществляемые в таких, близко друг от друга расположенных ячейках параллельных каналов, становится более вероятным.
Кроме того, когда антенны перемещаются относительно друг друга, перекрытие между ячейками изменяется как функция времени. Любое выделение дискретных участков спектра ячейкам остается действительным лишь до тех пор, пока относительное перемещение антенн не вызывает перекрытия между ячейками, с целью изменения.
Раскрытие изобретения
Преимущество настоящего изобретения состоит в том, что создана улучшенная система связи.
Другим преимуществом настоящего изобретения является то, что предложена сотовая система связи, которая эффективно многократно использует спектр на сферической поверхности, такой, как например, поверхность Земли, для увеличения мощности канала, задающей фиксированный частотный спектр.
Еще одним преимуществом является то, что в настоящем изобретении выполняется управление антеннами сотовой системы связи, когда антенны излучают на перекрывающиеся ячейки.
Еще одним преимуществом является то, что в настоящем изобретении предложена система связи, которая динамично назначает дискретные участки спектра ячейкам для компенсации изменения перекрытия между ячейками.
Еще одним преимуществом является то, что в настоящем изобретении предложена система связи, которая уменьшает связи, требуемые для динамического назначения дискретных участков спектра ячейкам.
Вышеприведенные и другие преимущества настоящего изобретения осуществляются в одной форме способом управления M антеннами, перемещающимися вокруг Земли, по существу, по N различным орбитам, где M и N являются целыми числами. Каждая из антенн выдает на Землю излучение определенного контура направленности, которое делится на множество ячеек. Каждая антенна управляется соответствующим приемопередатчиком. Способ предназначен для генерирования множества кратковременных определений назначений канал - ячейка. Каждое из этих определений связывает каналы с ячейками в соответствии с планом назначения спектра, который разносит ячейки параллельных каналов друг от друга на по меньшей мере заранее определенное расстояние. Множество определений характеризует положение ячейки в множество последовательных моментов времени. Оценка выполняется на множестве кратковременных определений назначений канал -ячейка с целью определения, для каких ячеек и соответствующих моментов времени изменяются назначения канала. Коме того, оценка определяет новые назначения каналов, вытекающие из этих изменений. На основе полученных результатов оценки осуществляется управление приемопередатчиками.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием вариантов его выполнения со ссылками на сопровождающие чертежи, на которых:
фиг. 1 изображает схему расположения спутниковой системы сотовой связи в соответствии с настоящим изобретением;
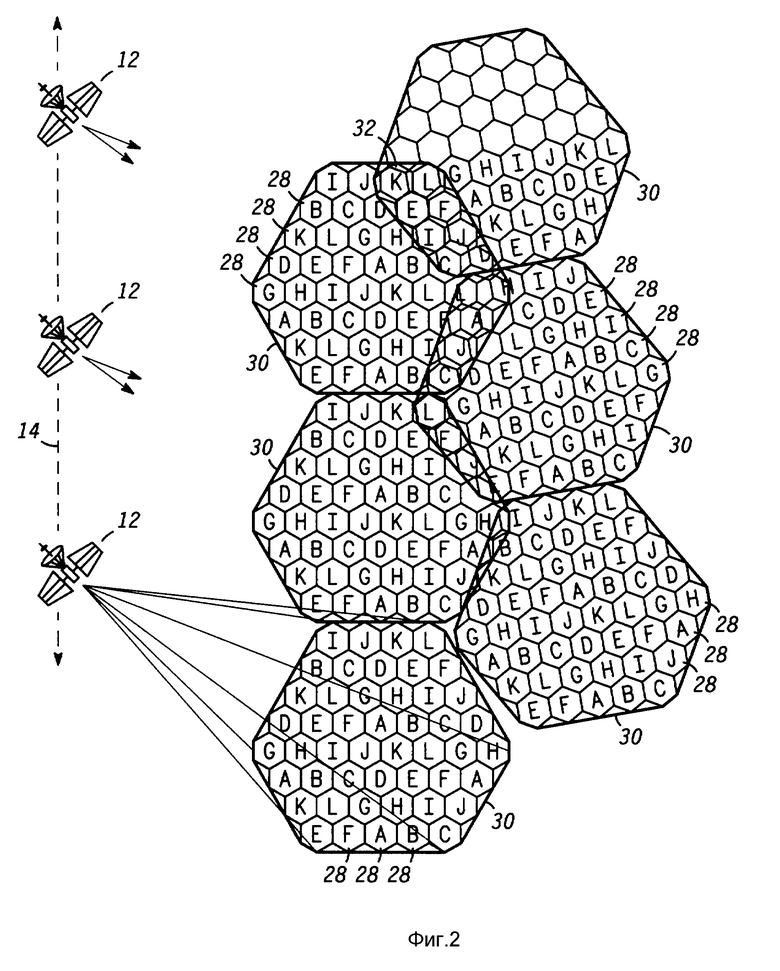
фиг. 2 - схему расположения части сотовой структуры, образованной на поверхности Земли антеннами, размещенными на орбите вокруг Земли в соответствии с настоящим изобретением;
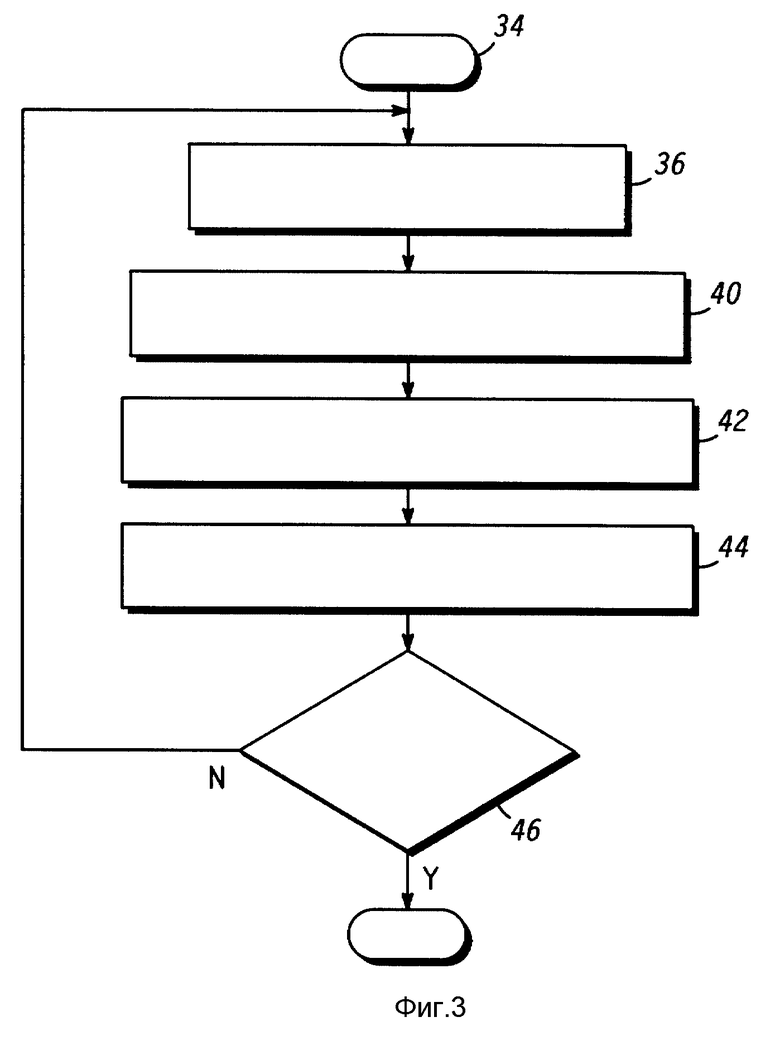
фиг. 3 - блок-схему алгоритма процедуры, используемой для назначения дискретных участков спектра ячейкам в соответствии с настоящим изобретением;
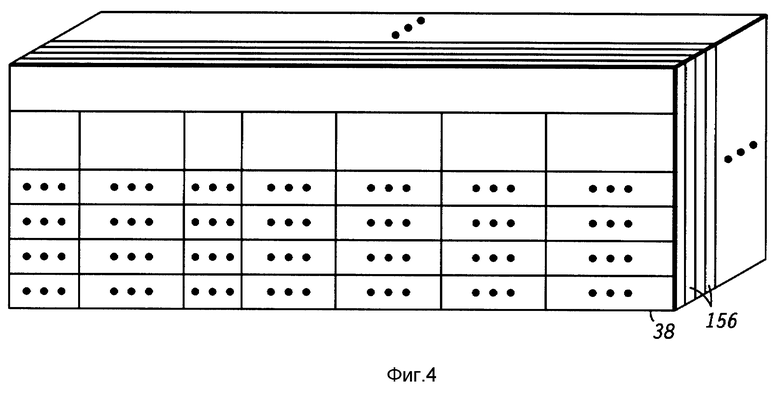
фиг. 4 - схему таблицы позиций, используемой процедурой фиг. 3 в соответствии с настоящим изобретением;
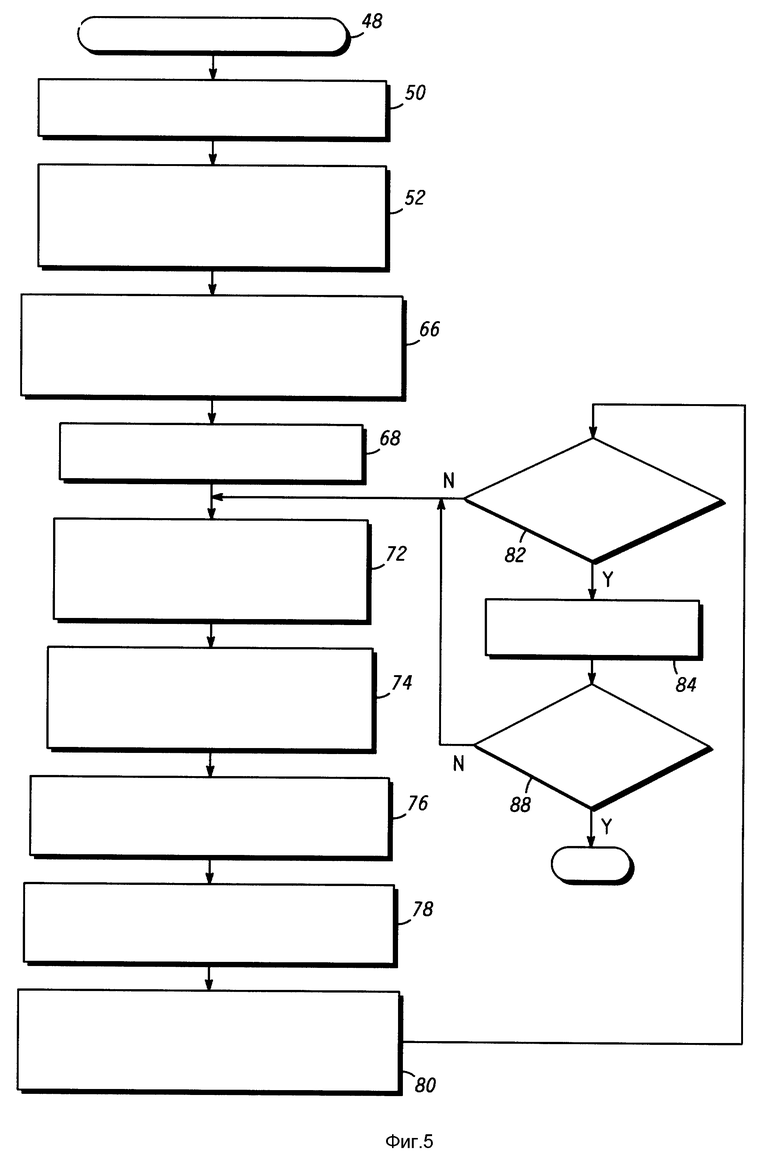
фиг. 5 - блок-схему алгоритма процедуры назначения множеств каналов, используемой процедурой, описанной на фиг. 3, в соответствии с настоящим изобретением;
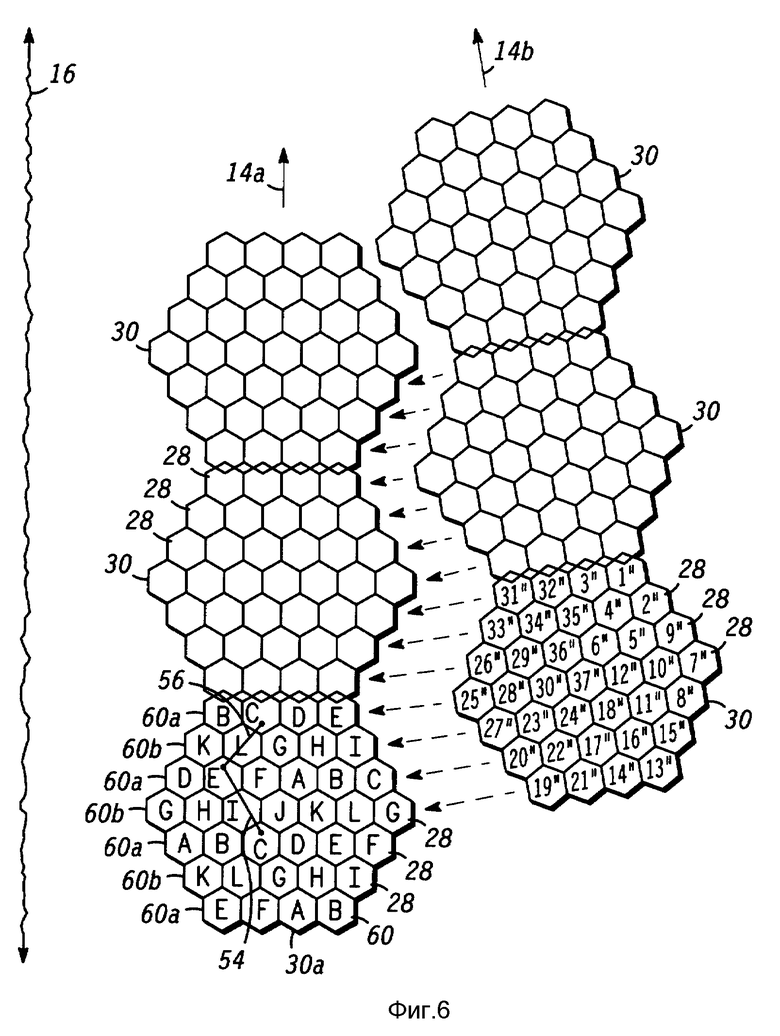
фиг. 6 - детализированную схему расположения части сотовой структуры, образованной на поверхности Земли, и, в качестве примера, назначений, сделанных на первом шаге процедуры, описанной на фиг. 5, в соответствии с настоящим изобретением;
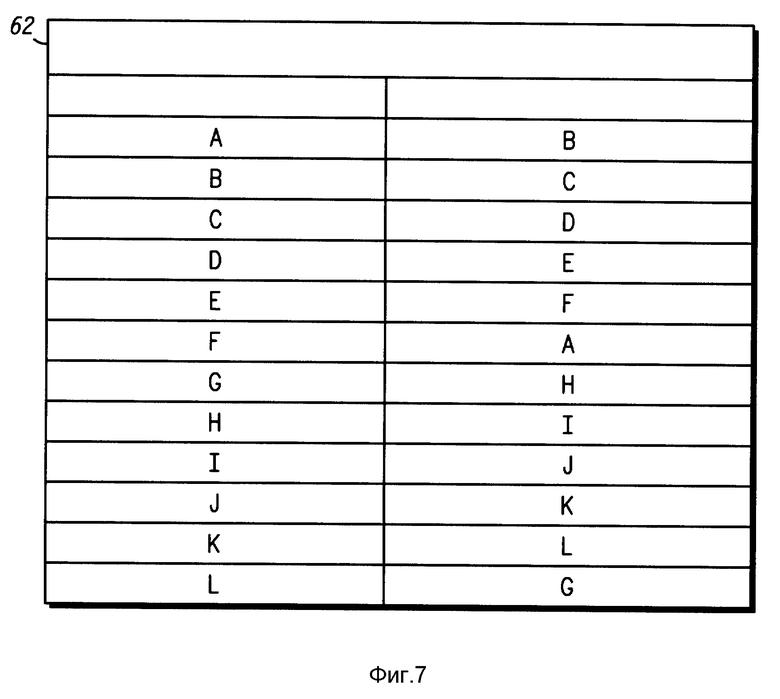
фиг. 7 - схему таблицы последовательности рядов, используемой процедурой, описанной на фиг. 5, в соответствии с настоящим изобретением;
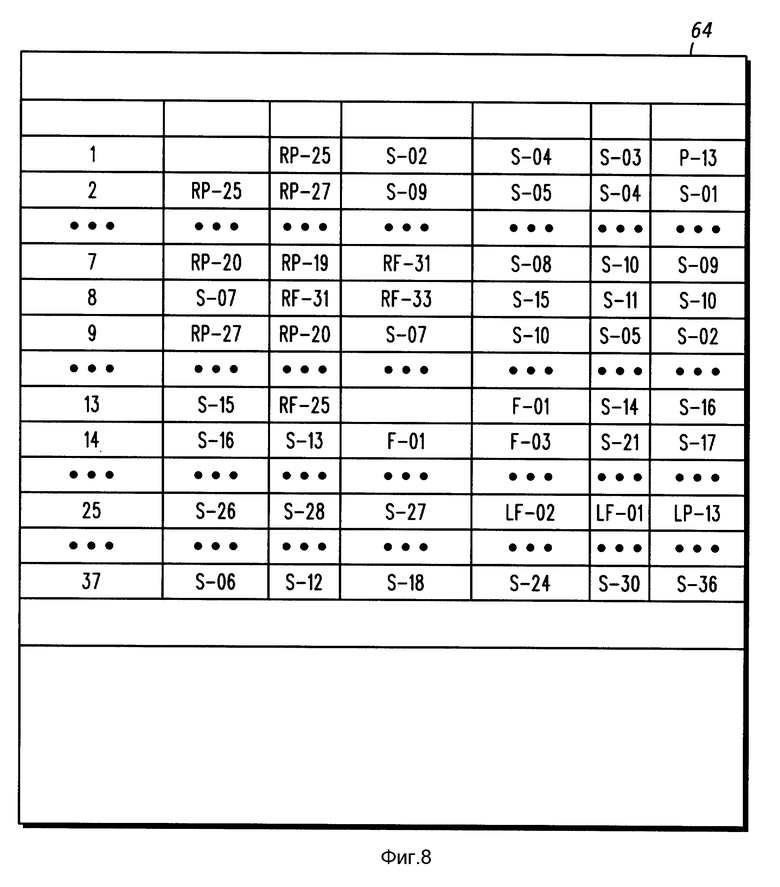
фиг. 8 - схему таблицы расположения ячеек, используемой процедурой, описанной на фиг. 5, в соответствии с настоящим изобретением;
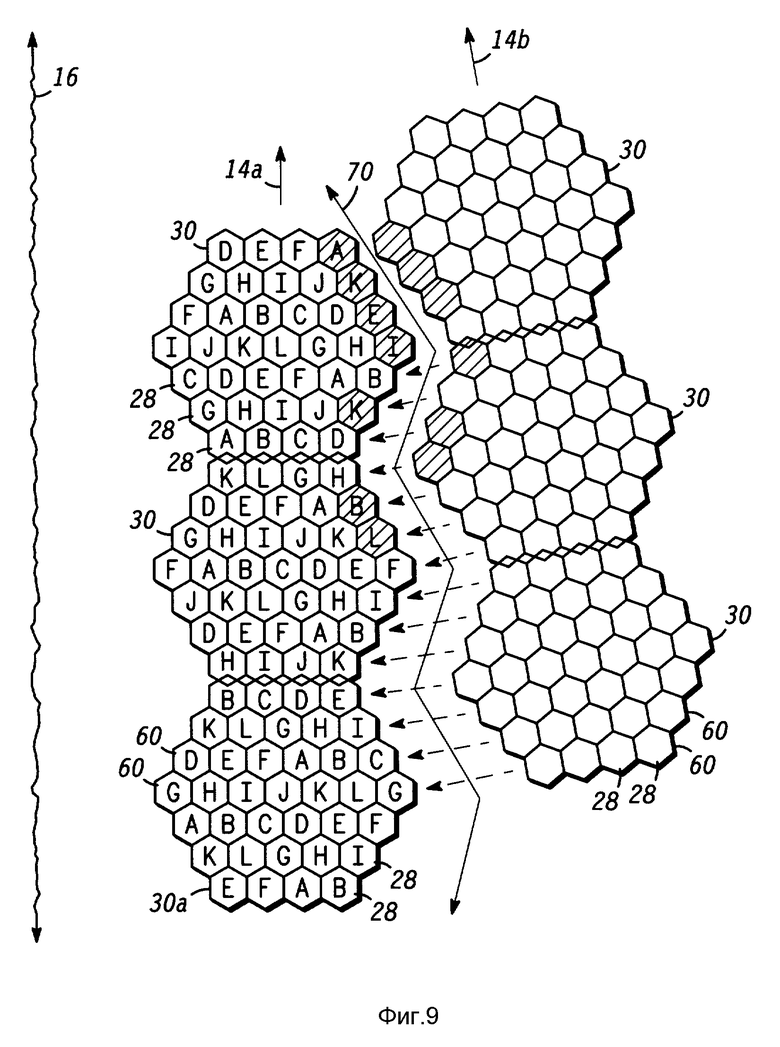
фиг. 9 - детализированную схему расположения части сотовой структуры, образованной на поверхности Земли, и в качестве примера, назначений, сделанных на втором шаге процедуры, описанной на фиг. 5, в соответствии с настоящим изобретением;
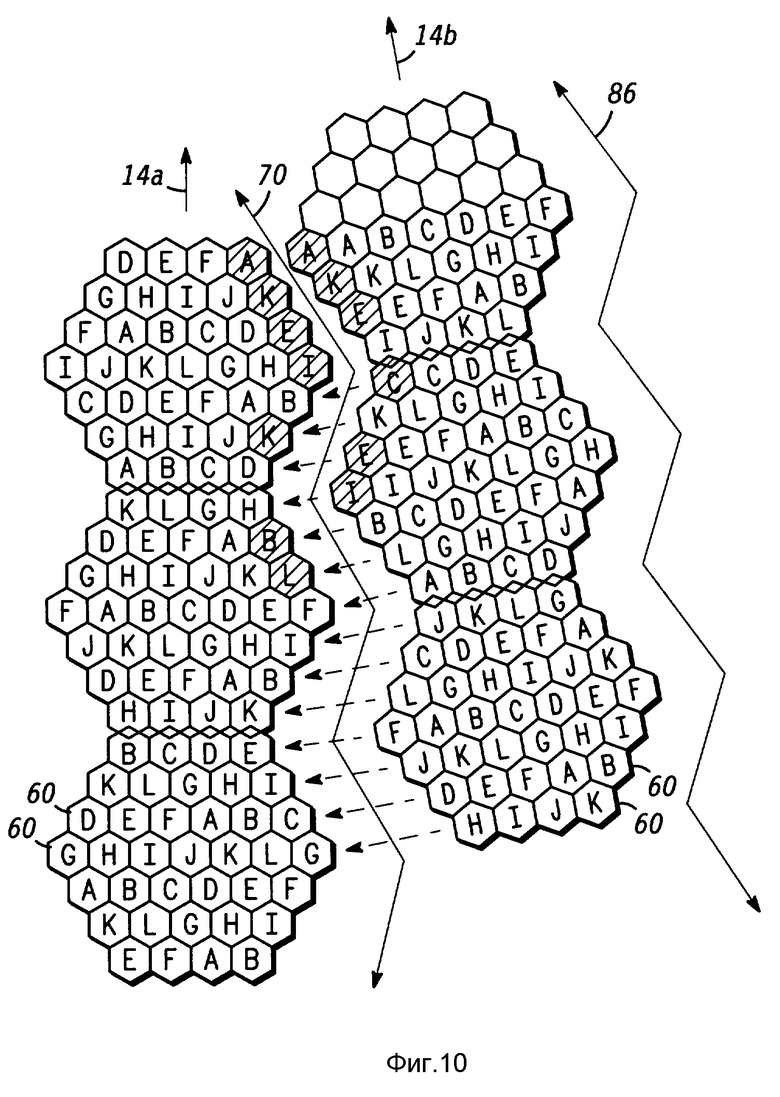
фиг. 10 - детализированную схему расположения части сотовой структуры, образованной на поверхности Земли и, в качестве примера, назначений, сделанных на третьем шаге процедуры, описанной на фиг. 5, в соответствии с настоящим изобретением.
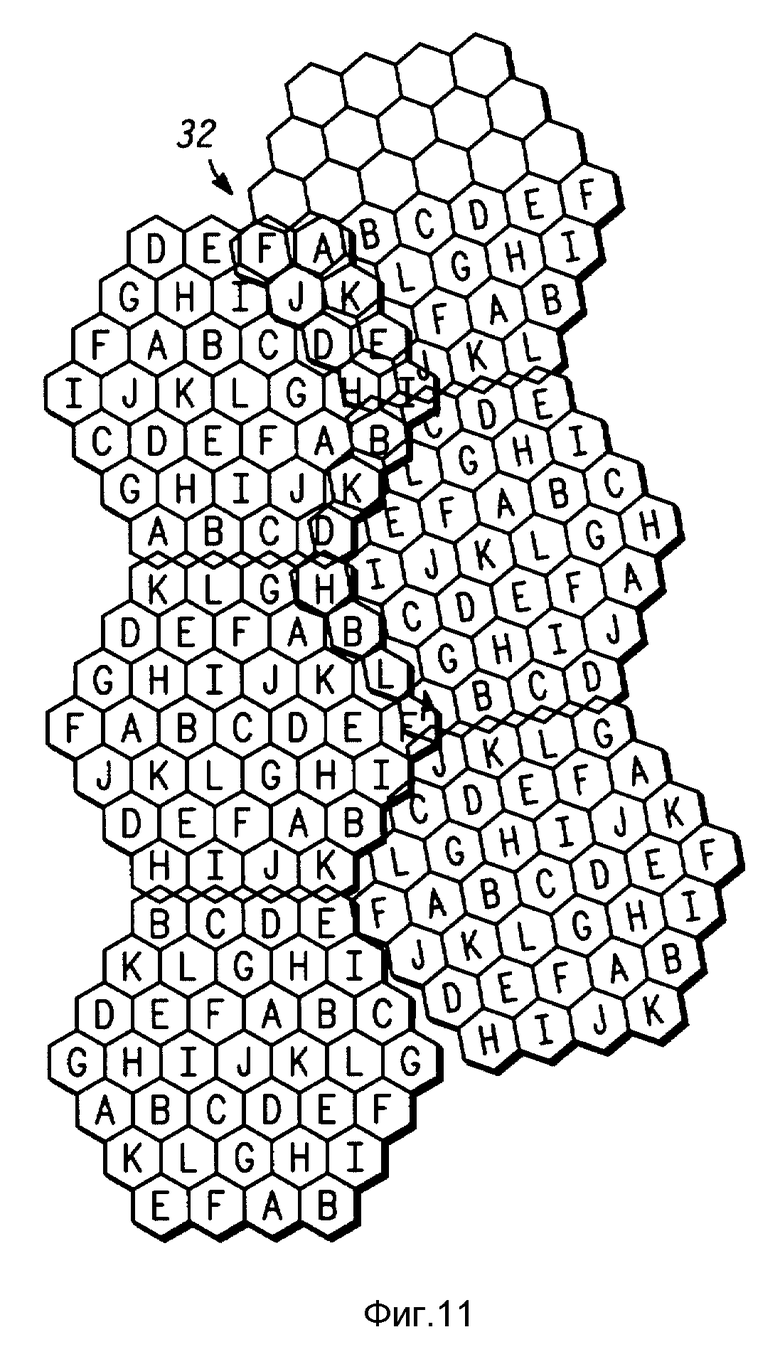
фиг. 11 - схему расположения части сотовой структуры, образованной на поверхности Земли и, в качестве примера, назначений, сделанных по завершению процедуры, описанной на фиг. 5, в соответствии с настоящим изобретением;
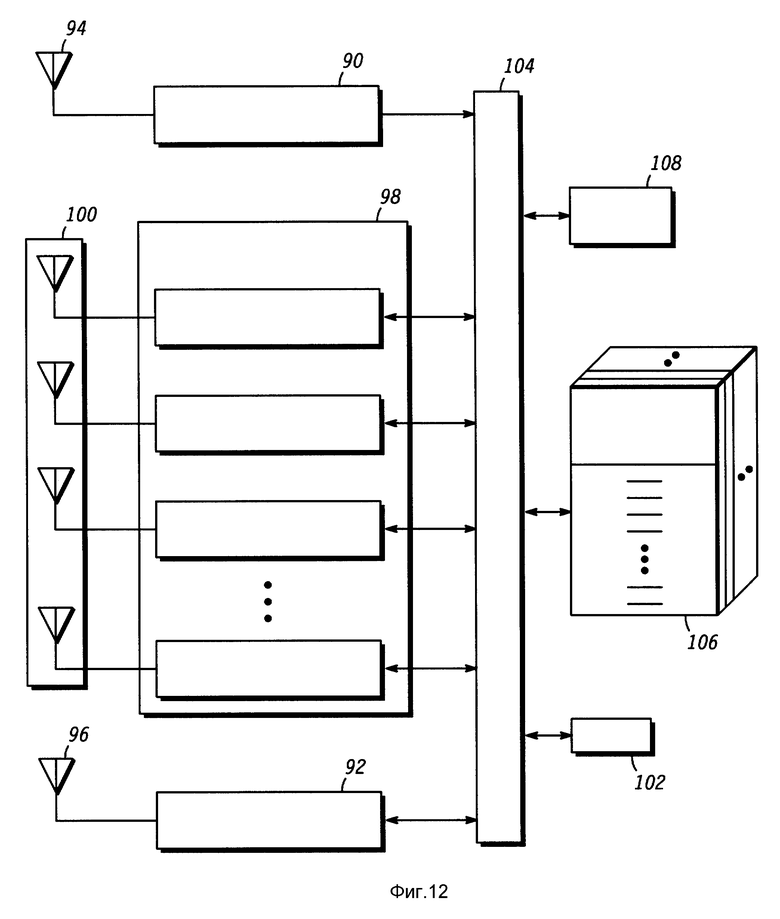
фиг. 12 - блок-схему спутника, сконструированного в соответствии с указаниями настоящего изобретения;
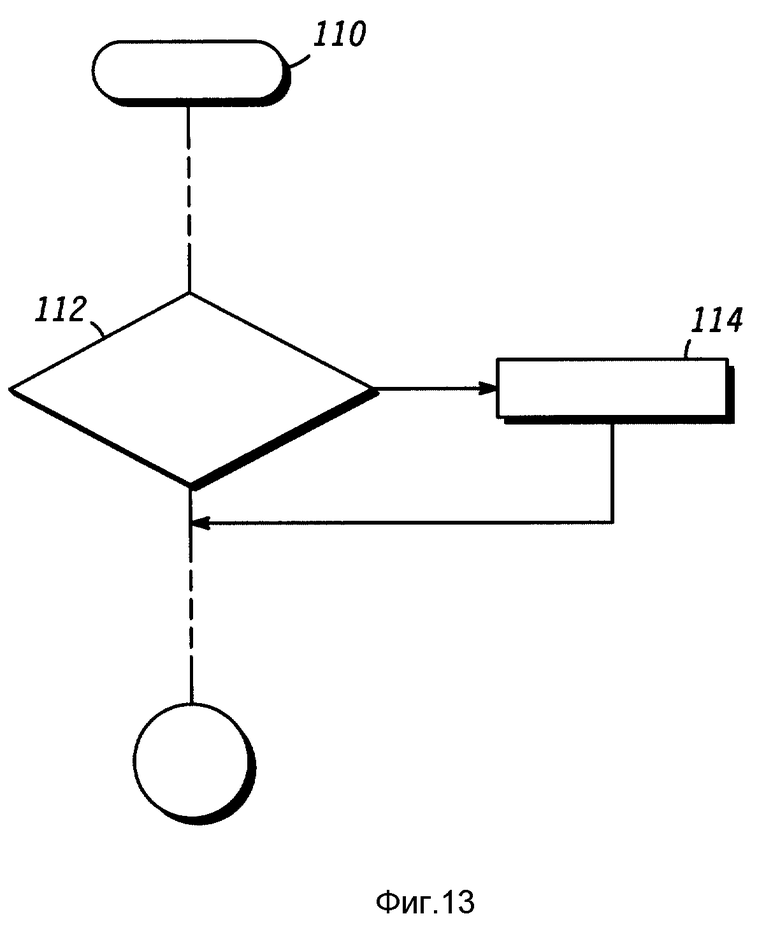
фиг. 13 - блок-схему алгоритма процедуры управления, выполняемой спутником с целью синхронизации временной диаграммы в соответствии с настоящим изобретением;
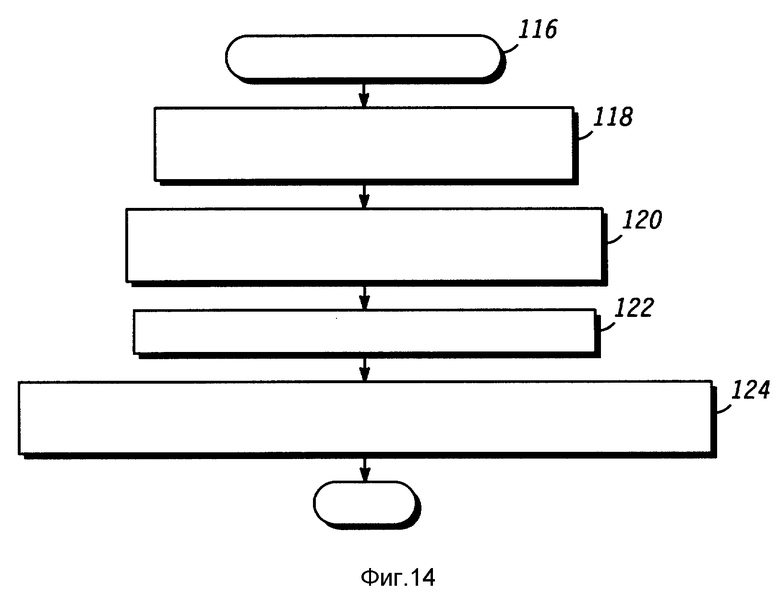
фиг. 14 блок-схему алгоритма процедуры прерывания таймера, выполняемой спутником с целью переключения назначений спектра ячеек в соответствии с настоящим изобретением;
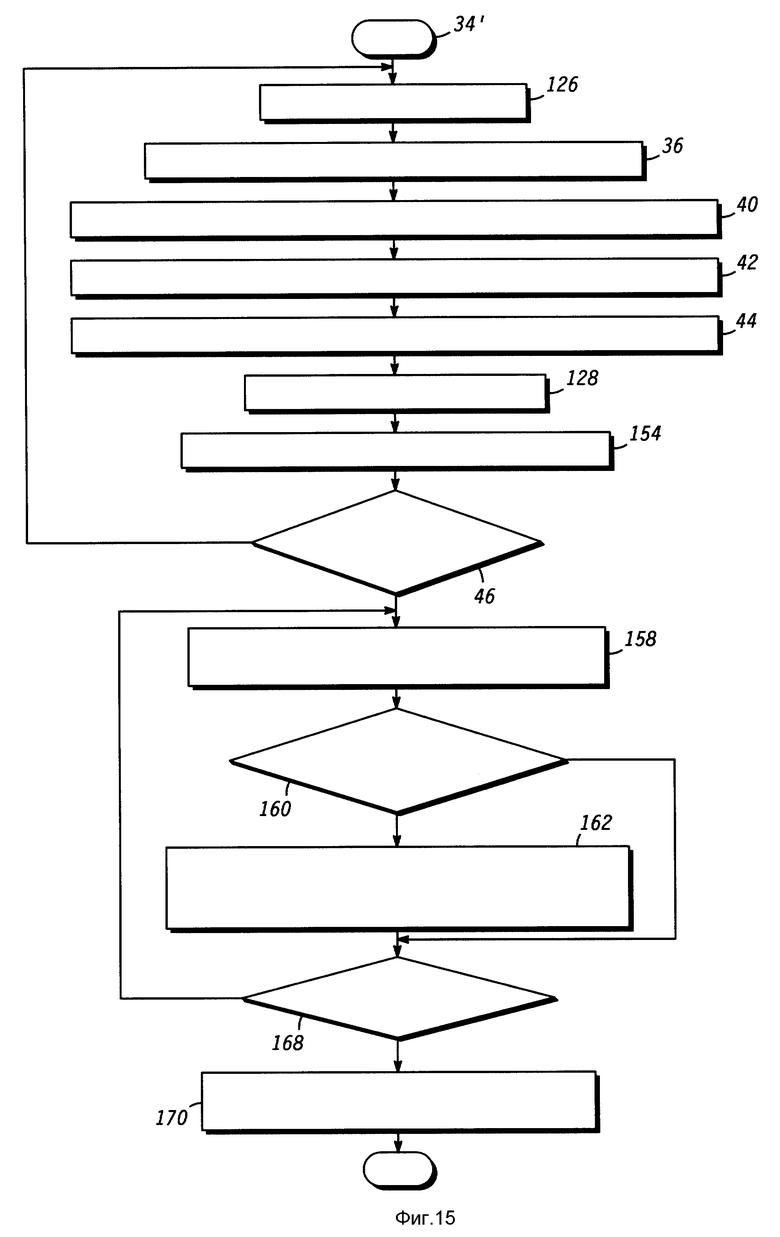
фиг. 15 - блок-схему алгоритма альтернативной процедуры, используемой для назначения дискретных участков спектра ячейкам, в соответствии с настоящим изобретением.
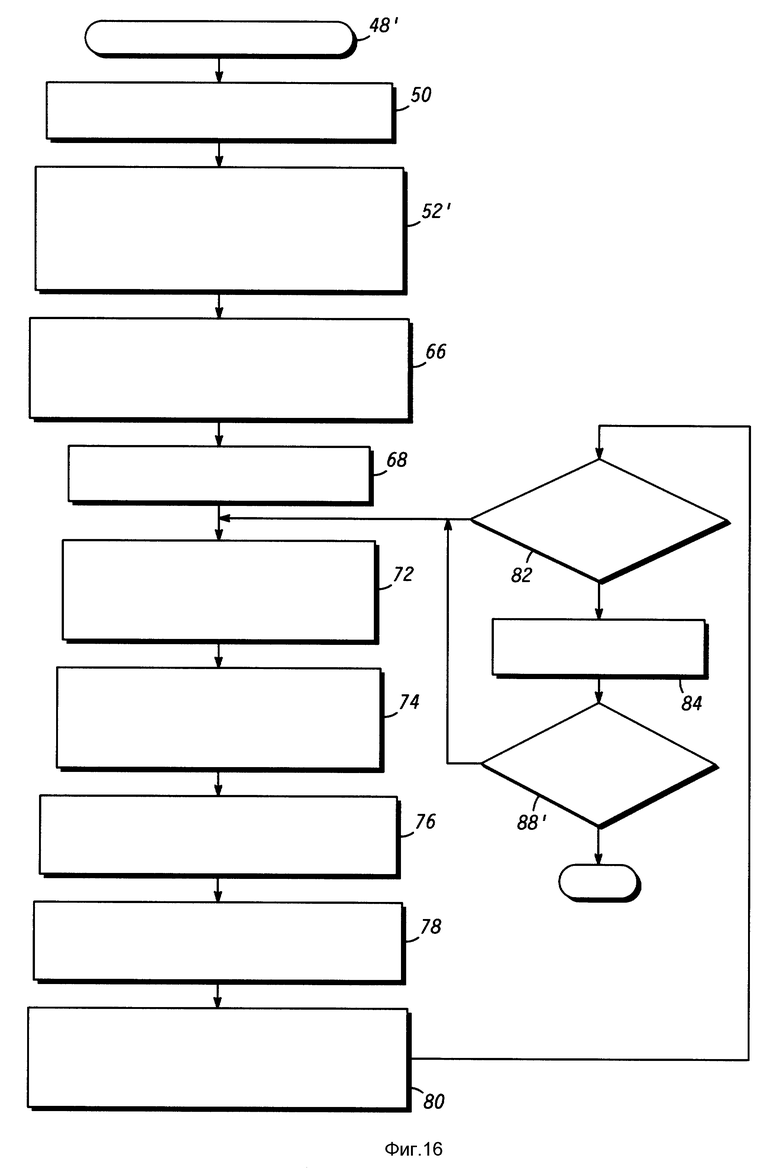
фиг. 16 - блок-схему алгоритма альтернативной процедуры назначения множеств каналов, которая используется процедурой, описанной на фиг. 15, в соответствии с настоящим изобретением;
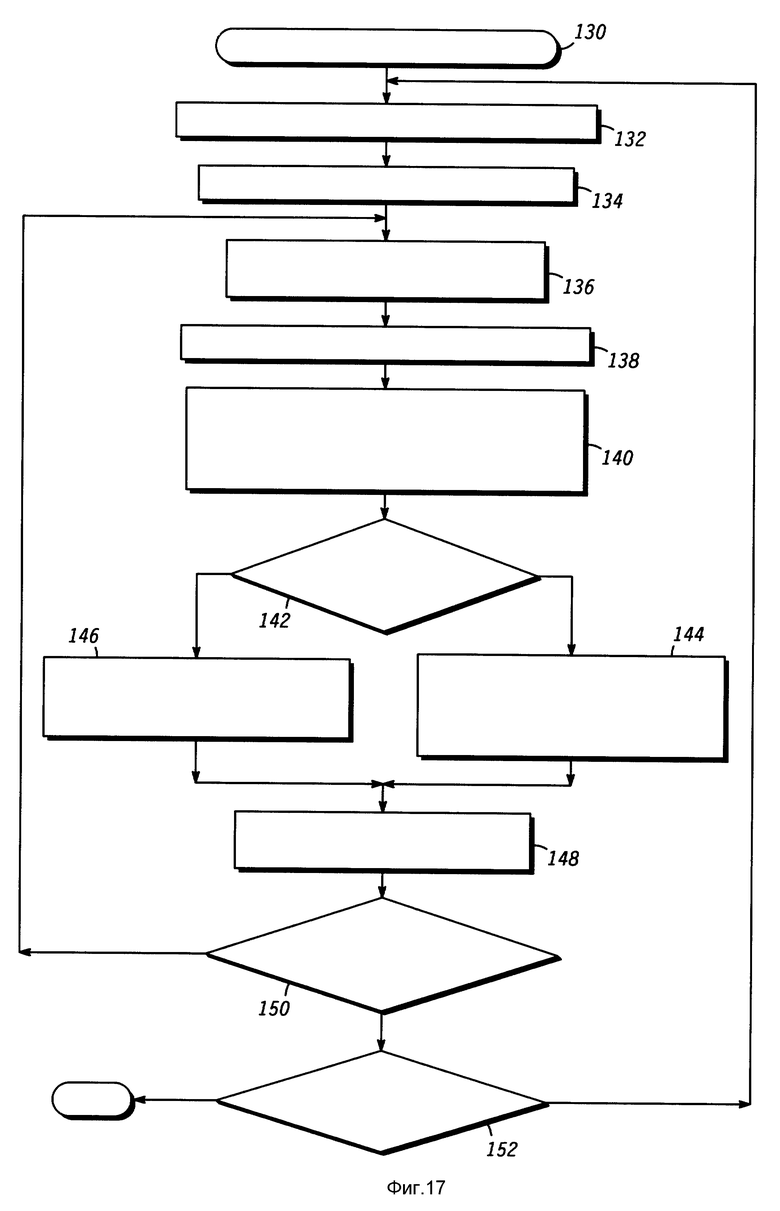
фиг. 17 - блок-схему алгоритма процедуры назначения множеств каналов швов, которая используется процедурой, описанной на фиг. 15, в соответствии с настоящим изобретением;
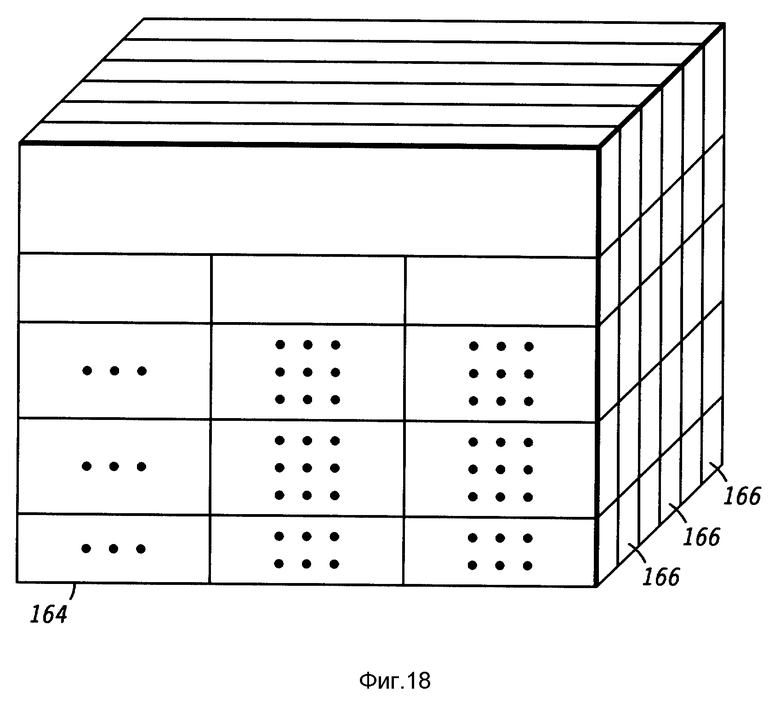
фиг. 18 - схему таблицы плана назначений канал-ячейка приемопередатчика в соответствии с настоящим изобретением.
Подробное описание предпочтительных вариантов осуществления
Фиг. 1 иллюстрирует спутниковую сеть 10 связи, распределенную по Земли с использованием нескольких надземных узлов связи, как орбитальные спутники 12. В предпочтительном варианте осуществления спутники 12 занимают полярные, низкие по отношению к Земле, орбиты 14. В частности, в предпочтительном варианте осуществления сети 10 используется шесть полярных орбит, причем на каждой орбите находится одиннадцать спутников 12 из общего числа в шестьдесят шесть спутников 12. Для большей ясности на фиг. 1 показано лишь несколько из этих спутников 12.
Орбиты 14 и спутники 12 распределены вокруг Земли. В примере, описываемом предпочтительным в данный момент вариантом осуществления, каждая орбита 14 окружает Землю на высоте порядка 765 км. Вследствие относительно низких орбит спутников 12, линия поля зрения электромагнитных передач от любого одного спутника, по существу, покрывает относительно малую площадь Земли в любой интервал или момент времени (здесь термины "интервал" и "момент времени" используются как взаимозаменяемые). Например, когда спутники 12 занимают орбиты порядка 765 км над Землей, такие передачи могут покрывать зоны "диаграммы направленности" около 5000 км в диаметре.
С низкорасположенных орбит 14 спутники 12 перемещаются по отношению к Земле со скоростью около 25000 км/час. Это позволяет спутникам 12 быть в пределах видимости с точки на поверхности Земли в течение максимального периода порядка в девять минут. Однако спутники 12 образуют созвездие, в котором спутники 12 остаются относительно постоянно по отношению друг к другу, за исключением двух режимов движения.
Первый режим движения происходит от орбит 14, сходящихся или пересекающих друг друга в полярных областях. Из-за этого режима движения расстояния между спутниками 12, помещенными на общие орбиты 14, остаются, по существу, постоянными. Однако расстояния между спутниками 12, помещенными на смежные орбиты 14, также называемые орбитами 14 в пересекающихся плоскостях, изменяются с географической широтой спутников 12. Наибольшее расстояние между этими спутниками 12 пересекающихся плоскостей существует на экваторе. Это расстояние уменьшается, когда спутники 12 пересекающихся плоскостей приближаются к полярным областям и увеличивается, когда спутники 12 пересекающихся плоскостей приближаются к экватору.
Второй режим движения происходит на стыке (шве) 16 созвездия. Стык 16 делит Землю на полусферы по отношению к созвездию спутников 12. В одной полусфере спутники 12 перемещаются с юга на север, как показано стрелками 20 направления на фиг. 1. Стык 16 помещает противоположные стороны Земли между южно-северной частью орбиты 14 и северо-южной частью орбиты 14. Спутники, 12, соседние и на противоположных сторонах стыка 16, движутся в противоположных направлениях, приближаются и проходят мимо друг друга со скоростью около 50000 км/час.
Спутники 12 связываются с приборами на Земле через множество центральных коммутационных телефонных станций (CSO) 22, из которых на фиг. 1 показана лишь одна, небольшое число наземных станций управления (GCS) 24, из которых на фиг. 1 показана лишь одна, и любое число абонентских устройств 26 радиосвязи, одно из которых показано на фиг. 1 Абонентские устройства 26 могут быть распределены где-либо на поверхности Земли или в атмосфере над Землей. CSO 22 предпочтительно распределяются по поверхности земли в соответствии с геополитическими границами. GCS 24 предпочтительно размещаются в самых высоких северных и южных широтах, где схождение орбит 14 заставляет большее число спутников 12 появляться в пределах прямой видимости с одной точки поверхности Земли по сравнению с экваториальными широтами. Предпочтительно используется около четырех GCS 24, так, чтобы все спутники 12 в созвездии могли прийти в одну и ту же точку их орбиты 14 в пределах прямой видимости назначенного им GCS 24. Однако точное число и места расположения GCS 24 не являются критическими особенностями настоящего изобретения. Любой спутник 12 может связываться для передачи данных с любым GCS 24 в любое время через созвездие спутников 12.
Ничто не препятствует сосредоточить CSO и GCS вместе на Земле. Однако CSO 22 выполняет функцию, отличную от функции GCS 24. GCS предпочтительно предназначен для выполнения телеметрических, траекторных и управляющих (TT & C) функций для созвездия спутников 12.
CSO 22 предпочтительно функционируют в узлах связи в сети 10. Другие, отличные системы связи наземного базирования, такие как всемирная коммутационная телекоммуникационная сеть общего пользования (не показана), может иметь доступ к сети 10 через CSO 22. Благодаря конфигурации созвездия спутников 12 по меньшей мере один из спутников 12 все время находится в пределах прямой видимости с каждой точки поверхности Земли.
Соответственно, сеть 10 через созвездие спутников 12 может создать цепь связи между любыми двумя абонентскими устройствами, 26, между любым абонентским устройством 26 и CSO 22 или между любыми двумя CSO 22.
На фиг. 2 показана статическая схема положения приведенного в качестве примера сотовой антенной структуры, созданной шестью спутниками 12, в котором три из шести спутников последовательно помещаются на одной орбите 14, а другие три из шести спутников 12 последовательно помещаются на смежной орбите 14. Для ясности на фиг. 2 изображены только первые три спутника 12.
Каждый спутник 12 содержит матрицу (не показана) направленных антенн, которые также рассматриваются как одиночная многонаправленная, многолучевая антенна. Каждая матрица облучает (проецирует) в пределах множество дискретных диаграмм направленности множество зон на поверхности Земли под разными углами, исходящими от ее спутника 12. На фиг. 2 показана схема результирующей сотовой структуры 28, которую спутники 12 совместно образуют на поверхности Земли. При спутниках 12, расположенных на высоте 765 км над Землей, ячейки 28 могут иметь диаметр, в общем, в диапазоне 526 - 753 км. При спутниках 12, движущихся со скоростью до 25000 км/час по отношению к земле, ячейки 28 также перемещаются над Землей с близкой к этой скоростью, и любая данная точка на поверхности Земли находится в пределах одной ячейки 28 в течение приблизительно более одной минуты.
Сотовые структуры 28, которую один спутник 12 проектирует на поверхность Земли, заключены в контур 30 диаграммы направленности. На фиг. 2 изображены контуры 30 диаграммы направленности, где каждый имеет сорок восемь ячеек 28. Однако точное число ячеек 28, содержащихся в контуре 30 диаграммы направленности, является несущественным для целей настоящего изобретения. Кроме того, фиг. 2 иллюстрирует перекрытие 32, которое является результатом вышеупомянутого схождения орбит 14. Размер перекрытия 32 изменяется в зависимости от расположения перекрывающихся контуров 30 диаграммы направленности. Как можно определить, обратившись к фиг. 1 - 2, наибольшая величина перекрытия 32 получается в полярных областях Земли, тогда как малое перекрытие или его отсутствие наблюдается в экваториальных областях Земли. Специалисту в данной области техники очевидно, что фиг. 2 представляет снимок контуров 30 диаграммы направленности и что часть перекрытия 32, которая ассоциируется с любыми двумя соседними контурами 30 диаграммы направленности плоского сечения, изменяется при перемещении по орбитам 14.
Для удобства на фиг. 2 ячейки 28 и контуры 30 диаграммы направленности изображены как дискретные, в общем, шестиугольные, формы без перекрытий или зазоров, отличающиеся от ячеек и контуров, являющихся атрибутами схождения орбит 14 около полярных областей Земли. Однако для специалиста в данной области техники очевидно, что реальные эквипотенциальные линии, исходящие из антенн спутников 12, могут быть скорее круговыми или эллиптическими, чем шестиугольными, что боковые лепестки диаграммы направленности антенны могут исказить диаграмму направленности и что может ожидаться некоторое, предпочтительно незначительное перекрытие смежных ячеек.
Хотя на фиг. 1 - 2 и в вышеприведенном описании приведена предпочтительная орбитальная геометрия для сети 10, для специалиста в данной области техники очевидно, что узлы связи, которые создают спутники 12, не обязательно должны быть расположены так, как там описано. Например, такие узлы могут быть расположены на поверхности Земли или на орбитах, отличающихся от описанных здесь. Аналогично точное число узлов может меняться от сети к сети.
Созвездие спутников 12 имеет связь со всеми абонентскими устройствами 26 (фиг. 1), используя ограниченную величину электромагнитного спектра. Точные параметры этого спектра являются несущественными для настоящего изобретения и могут меняться от сети к сети. В настоящем изобретении этот спектр делится на дискретные участки, называемые в данном случае канальными группами (множествами). Точный способ деления этого спектра также является несущественным для настоящего изобретения. Например, спектр может быть разделен на дискретные частотные диапазоны, дискретные временные интервалы, дискретные методы кодирования или их комбинацию. Другими словами, одновременная связь может осуществляться в обычном месте расположения через каждую канальную группу без значительного взаимного влияния.
Подобным образом, точное число канальных групп, на которые делится спектр, не является существенным для настоящего изобретения. Фиг. 2 иллюстрирует в качестве примера выделение канальных групп ячейкам 28 в соответствии с настоящим изобретением и в соответствии с делением спектра на двенадцать канальных групп. На фиг. 2 указано двенадцать канальных групп с помощью использования символов "A", "B", "C", "D", "E", "F", "G", "H", "I", "J", "K", и "L". Специалисту в данной области техники очевидно, что может использоваться различное число канальных групп и что, если используется различное число, результирующее назначение канальных групп ячейкам 28 будет отлично от диаграммы направленности назначения, изображенной на фиг. 2. Аналогично для специалиста в данной области техники очевидно, что каждая канальная группа может включать в себя один канал или любое число ортогональных каналов и что не требуются разные канальные группы, чтобы включить в них одно и то же число каналов.
На фиг. 3 показана блок-схема алгоритма процедуры 34, используемой в первом варианте осуществления настоящего изобретения с целью назначения конкретной канальной группы конкретным ячейкам 28. Процедура, описанная на фиг. 3, может применяться на компьютере общего назначения или на борту одного или более спутников 12, блок-схема которых представлена ниже в связи с фиг. 12. Специалисту в данной области техники очевидно, что компьютер общего назначения может включать в себя один или более процессоров (не показано), которые выполняют шаги, описанные на блок-схеме алгоритма фиг. 3, под воздействием команд, хранящихся в его памяти (не показана).
Процедура 34 выполняет задачу 36 для моделирования позиции всех ячеек 28 относительно друг друга. Для первой итерации процедуры 34 приемлемо любое расположение созвездия спутников 12. Для последующих итераций моделируемыми позициями предпочтительно являются позиции, которые являются результатом движения спутников 12 по орбитам 14 при удалении от позиции, ассоциированной с предыдущей итерацией процедуры 34 для заранее определенного приращения времени. В первом варианте осуществления настоящего изобретения это приращение аппроксимирует смещение на диаметр одной ячейки от соответствующих позиций, использованных в предыдущей итерации.
Задача 36 может записывать позицию каждой ячейки 28 в таблицу, подобную таблице 38 позиций, схема которой показана на фиг. 4. Позиция каждой ячейки может выражаться широтой и долготой ячейки или в любой другой удобной форме. Данные позиции могут обсчитываться с помощью применения обычных тригонометрических приемов к геометрии антенн и орбит. В частности, позиции ячеек могут определяться из позиций орбит, скорости спутников, высоты орбиты над землей и углов смещения для различных лучей, выдаваемых антеннами спутников от направлений надира спутников. Позиции, записанные в таблице 38, могут, по желанию, описывать положение центра каждой ячейки 28 на поверхности Земли. Если каждый контур 30 диаграммы направленности включает в себя сорок восемь ячеек 28, а созвездие включает в себя шестьдесят шесть спутников 12, тогда задача 36 описывает 3168 позиций. Если каждый контур диаграммы направленности включает в себя тридцать семь ячеек 28, а созвездие включает в себя шестьдесят шесть спутников 12, тогда задача 36 описывает 2442 позиции.
Вернемся снова к фиг. 3, вслед за задачей 36 задача 40 определяет каждую ячейку, генерируемую в результате деятельности созвездия спутников 12, как активную или неактивную. Активные ячейки могут рассматриваться как "включенные", тогда как неактивные ячейки могут рассматриваться как "выключенные". Спутники 12 воздерживаются от ведения передач в неактивных ячейках 28, а любые сигналы, принимаемые на спутниках 12 от неактивных ячеек 28, игнорируются. Спутники 12 передают /принимают сигналы к/от активных ячеек, используя канальные группы, назначенные соответствующим активным ячейкам.
Вообще говоря, задача 40 может выполняться посредством анализа позиций, записанных в таблице 38, (фиг. 4) в процессе задачи 36. Расстояние между центром каждой ячейки и центрами всех других ячеек может сравниваться с заранее определенным расстоянием. Когда расстояние между двумя ячейками 28 меньше заранее определенного расстояния, декларируется перекрытие между двумя ячейками. В предпочтительном варианте осуществления перекрытие декларируется, когда по меньшей мере 70% двух ячеек 28 занимают одну и ту же область. Затем в задаче 40 определяется, какую из двух перекрывающихся ячеек 28 определить неактивной, чтобы избавиться от перекрытия. Обычно как неактивная в задаче 40 определяется скорее ячейка 28, расположенная ближе к внешней области ее контура 30 диаграммы направленности, чем перекрывающаяся ячейка 28, расположенная ближе к центральной области контура диаграммы направленности. Любая ячейка, которая не декларируется как неактивная, определяется как активная. Дополнительные подробности, связанные с работой задачи 40, можно получить, обратившись к вышеуказанным патентам, имеющим отношение к теме.
После задачи 40 в задаче 42 назначаются, в первом варианте осуществления настоящего изобретения, канальные группы всем активным ячейкам в юго-северной полусфере созвездия спутников 12. Как указывалось выше в связи с фиг. 1, эта полусфера отделена от северо-южной полусферы швом (стыком) 16. Эти назначения записываются предпочтительно в таблицу 38 позицией (фиг. 4) в соединении с идентификатором каждой ячейки. Подробности, связанные с назначением канальных групп ячейкам, обсуждаются ниже в связи с фиг. 5-11. После завершения задачи 42, в задаче 44 повторяется эта процедура назначения, за исключением, того, что в задаче 44 назначаются канальные группы для северо-южной полусферы созвездия спутников 12.
После задачи 44, в задаче 46 запроса определяется, смоделированы ли позиции ячеек для всей орбиты. Если вся орбита еще не смоделирована, программа возвращает управление назад на задачу 36, чтобы увеличить позиции ячеек и повторить процедуру назначения. Если в задаче 46 определяется, что вся орбита смоделирована, процедура 34 может остановиться, поскольку канальная группа к назначениям ячеек для дополнительных позиций будет, в общем, дублировать предыдущие назначения, записанные в таблице 38 (фиг. 4).
Затем спутники 12 могут использовать данные этих назначений в управлении работой своих приемопередатчиков и антенн, как обсуждается ниже в связи с фиг. 12-14. Процедура 34 предпочтительно выполняется в "автономном режиме" и лишь те канальные группы предоставляемые ячейкам для всей орбиты, которые являются результатом процедуры 34 и имеют отношение к данному спутнику 12, записываются в память спутника 12. Однако в альтернативном варианте осуществления спутники 12 сами могут выполнять процедуру 34 или части ее и использовать результирующую канальную группу, предоставляемую ячейкам для управления операциями своих приемопередатчиков и антенн. В этом альтернативном варианте осуществления петля обратной связи, изображенная на фиг. 3, может повторяться неопределенно, при каждой итерации петли, моделируя позиции спутниковых ячеек непосредственно перед достижением ячейками смоделированных позиций. Затем результирующие назначения будут доступны, когда необходимо, а дополнительные назначения не будут нужны до тех пор, пока движение спутника не заставит ячейки перемещаться в свои приращенные позиции.
На фиг. 5 показана блок-схема алгоритма процедуры 48 Присвоения канальных групп, используемой в задачах 42 и 44 процедуры 34 (фиг. 3), в соответствии с первым вариантом осуществления настоящего изобретения, для назначения канальных групп, ячейкам, генерируемым одной полусферой созвездия спутников 12. Согласно задачи 50 в процедуре 48 выбирают опорный контур 30а диаграммы направленности в опорной орбитальной плоскости 14а, как показано на фиг. 6.
На фиг. 6 (подобном фиг. 2) показана детализированная схема расположения шести контуров 30 диаграммы направленности. Фиг.6 иллюстрирует систему, чаще использующую тридцать семь ячеек 28 на контур 30 диаграммы направленности, чем сорок восемь ячеек 28 на контур 30 диаграммы направленности, изображенные на фиг. 2. Кроме того, фиг. 6 является детализированной схемой, поскольку контуры 30 диаграммы направленности, создаваемые спутниками 12 на одной орбите 14а, отделены от контуров 30 диаграммы направленности, создаваемых спутниками 12 на смежных орбитах 14b. На фиг. 6 показаны реально перекрывающиеся контуры 30 диаграмм направленности как отдельные, чтобы выше описанная процедура назначения канальных групп ячейкам была более ясной.
Хотя любой контур 30 диаграммы направленности в выбранной полусфере может служить в качестве опорного контура 30a диаграммы направленности, в задаче 50 в предпочтительном варианте осуществления используется контур 30 диаграммы направленности, расположенный экваториально в орбитальной плоскости 14, примыкающий к стыку 16 (фиг. 1). После задачи 50, задача 52 содержит план присвоения канальных групп с целью назначения канальных групп ячейкам 28, расположенным внутри опорного контура 30a диаграммы направленности. На фиг. 6 показана примерная многократно используемая сотовая структура двенадцати ячеек, которую задача 52 назначает ячейкам 28 опорного контура 30a диаграммы направленности. Другими словами, двенадцать дискретных канальных групп распределены среди ячеек 28 контура 30a диаграммы направленности таким образом, чтобы параллельные ячейки были отделены друг от друга минимальным, заранее определенным расстоянием.
В соответствии с первым вариантом осуществления настоящего изобретения, контуры 30 диаграммы направленности, расположенные в двух полусферах, могут использовать различные канальные группы для предотвращения взаимодействия между собой на стыке 16.
В задаче 52 могут назначаться канальные группы, используя план или формулу:
N = i2 + j2 + i • j,
где N - число назначаемых дискретных канальных групп, имеющихся в наличии в спектре;
i - параметр сдвига для первого направления;
j - параметр сдвига для второго направления; и
i ≤ j.
Используя эту формулу, ячейки параллельных каналов определяются перемещением ячеек "i" в первом направлении, удаляясь от ячейки источника, как показано сегментом 56 линии на фиг. 6. Результаты применения этого плана назначения для всех ячеек 28 внутри контура 30a диаграммы направленности затем записываются в структуру памяти, такую, как таблица 38 позиций (фиг. 4).
В альтернативном варианте осуществления в задаче 52 (фиг. 5) может использоваться таблица (не показана), которая связывает назначения канальных групп с номерами ячеек. Относительно другого контура 30 диаграммы направленности, на фиг. 6 показано примерное присвоение номеров ячеек ячейкам 28. Эти номера отмечены метками "1- 37" на фиг. 6. Каждый контур 30 диаграммы направленности использует предпочтительно одну и ту же схему нумерации ячеек. Номера ячеек используются для идентификации ячеек 28 в таблице 38 позиций (фиг. 4) и других структурах памяти, используемых процедурами 34 (фиг. 3) и 48. Специалисту в данной области техники очевидно, что конкретное назначение номеров ячеек ячейкам 28 является произвольным и что, наряду с тем, что каждая ячейка внутри контура 30 диаграммы направленности имеет свой собственный уникальный идентификатор, могут использоваться также и другие схемы нумерации ячеек. В этом альтернативном варианте осуществления задача 52 может назначать канальные группы ячейкам 28 опорного контура 30a диаграммы направленности посредством копирования назначений канальных групп соответствующей секции структуры памяти, такой, как например, таблица 38 позиций.
Еще в одном варианте осуществления настоящего изобретения задача 52 может использовать одну таблицу (не показана) для назначения канальной группы одной предварительно определенной ячейке в каждом ряду 60 опорного контура 30 диаграммы направленности 30a. Затем, в этом варианте осуществления может использоваться таблица 62 последовательности рядов, так, как это иллюстрируется на фиг. 7, для продвижения назначений влево и/или вправо, по отношению к направлению движения спутника 12, внутри каждого ряда 60 до тех пор, пока не будут достигнуты границы контуров 30a диаграммы направленности. Места расположения каждой ячейки 28 в контуре 30 диаграммы направленности могут определяться из любой объектной ячейки в контуре 30 диаграммы направленности посредством ссылки на таблицу 64 расположения ячеек, такую, как показана на фиг. 8. Используя таблицу 64, можно предварительно выполнить операцию просмотра таблицы для определения, какая ячейка расположена непосредственно слева, справа, слева-сверху, снизу-слева или снизу - справа от любой другой ячейки внутри контура 30 диаграммы направленности.
Специалисту в данной области техники ясно, что таблицы 62 и 64, показанные на фиг. 7-8, иллюстрируют лишь один пример ситуации. Таблица 62 последовательности рядов применима к используемому плану повторных назначений двенадцати ячеек, а таблица 64 применима к контуру 30 диаграммы направленности тридцати семи ячеек, имеющему назначения номеров ячеек, показанные на фиг. 6. Другие подобные таблицы или структуры памяти могут быть сформированы для достижения приемлемого плана назначений, который отделяет ячейки параллельных каналов на предварительно определенное расстояние друг от друга для различного числа дискретных канальных групп в спектре, для различного числа ячеек на контур диаграммы направленности и/или различных схем нумерации каналов.
Независимо от конкретной используемой обработки плана назначений, задача 52 назначает канальные группы ячейкам 28 внутри контура 30a диаграммы направленности в чередующихся рядах 60. Для примера, показанного на фиг. 6, канальные группы A-F включены в ряды 60a, а канальные группы G-L включены в ряды 60b. Ряды 60a и 60b чередуются друг с другом. Вдобавок, постоянный образец назначений канальных групп является результатом продвижения через ячейки 28 вверх-вправо (A-H-E-L-C-J, B-I-F-G-D-K) или вверх-влево (A-G-C-I-E-K-, B-H-D-J-F-L). Конечно противоположные последовательности являются результатом продвижения через ячейки 28 вниз-влево или вниз-вправо, соответственно.
Вернемся теперь назад к фиг. 5, после задачи 52 задача 66 продвигает план назначений через северную и южную границы для всех контуров 30 диаграммы направленности внутри опорного плана 14a (фиг. 9). Продвижение образца назначений через северную границу может быть достигнуто посредством следования вышеобсуждавшимся последовательностям вверх-вправо и вверх-влево или вышеобсуждавшейся формуле назначений. Продвижение образца назначений через южную границу может быть достигнуто посредством следования вышеобсуждавшимся последовательностям вниз-вправо и вниз-влево или вышеобсуждавшейся формуле назначений. Можно обратиться к таблице 64 (фиг. 8) местоположений ячеек, чтобы определить, какие ячейки неназначенного контура 30 диаграммы направленности, расположенного непосредственно к северу или к югу от назначенного контура 30 диаграммы направленности, являются первоначальными целями в последующих этих последовательностях.
Для специалиста в данной области техники ясно, что таблица 64 (фиг. 8) местоположений ячеек записывает дополнительные 30o поворота через северную и южную границы контура диаграммы направленности вдобавок и 60o, упоминавшимся выше в связи с формулой назначений. Эти дополнительные 30o объясняются тождеством ячеек, расположенных через (поперек) северную или южную границу от ячейки источника. Эти дополнительные 30o необходимы, потому что контуры диаграммы направленности тридцати семи ячеек и другие контуры диаграммы направленности, которые имеют одиночную, расположенную в центре ячейку 28, не имеют плавного перехода границ, как иллюстрируется на фиг. 6. Напротив, контуры диаграммы направленности сорока восьми ячеек и другие контуры диаграммы направленности, не имеющие единственной, расположенной в центре ячейки 28, плавно переходят в указанные границы, как иллюстрируется на фиг. 2. Когда в сети используются контуры диаграммы направленности, не имеющие единственной, расположенной в центре ячейки 28, дополнительные 30o поворота не являются необходимыми.
На фиг. 9 показано назначение канальных групп ячейкам в контуре 30 диаграммы направленности, расположенном в опорной плоскости 14a, после выполнения задачи 66 (фиг. 5). Конечно, задача 66 также придает канальные группы ячейкам 28 контуров 30 диаграммы направленности, расположенных к югу от опорного контура 30a диаграммы направленности, хотя эти южные контуры 30 диаграммы направленности даже не изображены на фиг. 9. На фиг. 9 также показано штриховкой, что определенные ячейки 28 определены как неактивные с помощью работы задачи 40 (фиг. 3).
После задачи 66 (фиг. 5) задача 68 выбирает первую границу 70 восток/запад между орбитальными плоскостями 14a, 14b. Предпочтительно, чтобы первая граница 70 была расположена на противоположной от стыка 16 стороне опорной плоскости 14a. Некоторые из неактивных ячеек 28 расположены около границы 70, но неактивных ячеек больше расположено в полярных областях, чем в экваториальных областях. На фиг. 9 иллюстрируется назначение канальных групп неактивным ячейкам в опорной плоскости 14e. Однако не имеет особого значения, представлены ли канальные группы действительно неактивным ячейкам.
После задачи 68 в задаче 72 (фиг. 5) идентифицируются соответственно ориентированные ряды 60 источника и цели на противоположных сторонах границы 70. Согласно фиг. 9, ряды 60 источника включены в одиночный контур 30 диаграммы направленности, расположенный на предварительно назначенной стороне границы 70. Ряды 60 цели включены в одиночный контур 30 диаграммы направленности, расположенный на неназначенной стороне границы 70. Соответственно ориентированные ряды 60 источника и цели показаны на фиг. 9 пунктирными линиями. Таблица 64 (фиг. 8) расположения ячеек может использоваться для идентификации конкретной ячейки 28 в конкретном контуре 30 диаграммы направленности, который сориентирован соответственно ряду цели. В примере, изображенном на фиг. 8-9, ячейки 28, расположенные вправо от большей части правых ячеек 28 в предварительно назначенном контуре 30 диаграммы направленности, размещены в ряду цели. Для первой итерации задачи 72 могут быть выбраны любые взаимно ориентированные ряды 60 источника и цели.
Согласно фиг. 5 и 9, после задачи 72 в задаче 74 определяется первая неактивная ячейка 28, появляющаяся при движении от границы 70 в ряду 60 источника, выбранного выше в задаче 72. После идентификации первой активной ячейки 28, задача 74 фиксирует идентификатор канальной группы, назначенной ей. После задачи 74 в задаче 76 идентифицируется первая активная ячейка, появляющаяся при движении от границы 70 в ряду 60 источника, выбранном выше в задаче 72.
После задач 74 и 76 задача 78 присваивает канальную группу первой активной ячейки в ряду 60 цели. Присваивание выполняется путем следования последовательности рядов от канальной группы, записанной выше в задаче 74. Последовательность рядов может определяться, например, по таблице 62 (фиг. 7) последовательности рядов. Начиная с этой первой активной ячейки в ряду цели и продолжая от границы 70, задача 80 прослеживает последовательность рядов для назначения канальных групп оставшихся ячейкам в ряду цели целевого контура 30 диаграммы направленности. Таблица 62 (фиг. 7) последовательности рядов и таблица 64 (фиг. 8) расположения ячеек могут использоваться при предоставлении канальных групп.
После задач 72-80, вопросительная задача 82 определяет, является ли перед этим определенный ряд 60 цели последним рядом, которому должно быть сделано назначения на границе 70. До тех пор, пока остаются дополнительные ряды 60, которым требуется назначение, программное управление повторяет задачи 72-82 для назначения канальных групп другим рядам по границе 70.
Когда все ряды на границе 70 получили назначение, результирующее назначение имеет сходство с ситуацией, изображенной на фиг. 10. Как отмечалось выше, не имеет особого значения, назначены ли канальные группы неактивным ячейкам. По получении всеми рядами на границе 70 назначения задача 84 (фиг. 5) выбирает другую границу 86, которая находится предпочтительно на стороне контуров 30 диаграммы направленности цели, противоположной относительно границы 70. Далее задача 88 запроса (фиг. 5) по первому варианту осуществления настоящего изобретения определяет, расположена ли выбранная граница 86 на стыке 16 (фиг. 1). До тех пор, пока новая граница 86 не будет расположена на стыке 16, задачи 72-84 повторяются для распространения назначений канальных групп по выбранной полусфере. Когда канальные группы назначены ячейкам 28, расположенным на стыке 16, процедура 48 прекращается.
Фиг. 11 иллюстрирует примерный образец назначения, который является результатом выполнения задач 72-84 и рассмотрен для перекрытия 32. В результате выполнения задач 72-84 канальные группы назначены ячейкам в рядах цели контура 30 диаграммы направленности путем следования последовательности рядов и исключения канальной группы, назначенной последней активной ячейке в ряду цели. Следовательно, назначение канальных групп в ряду цели ответственно за назначения, сделанные активным ячейкам соответствующего ряда источника и любым неактивным ячейкам, расположенным в рядах источника и/или цели. Посредством следования последовательности рядов, но пропуская неактивные ячейки, минимальное разделяющее расстояние между ячейками параллельных каналов сохраняется поперек границы 70. Для специалистов в данной области техники очевидно, что случайный пропуск ячеек в плане назначения каналов и выше упоминаемый поворот на 30o вызовет последовательности вверх-вправо, вверх-влево, вниз-вправо и вниз-влево, упоминаемые выше, чтобы чередоваться в различных местоположениях после пересечения границы 70. Это чередование окажет лишь малое воздействие на минимальное разделение между ячейками параллельных каналов, поскольку оно происходит в северо-южном направлении между рядами 60 и отсутствует в восточно-западном направлении в границах одного ряда 60. Как отмечалось выше, назначения канальных групп соответствует последовательностям, которые повторяются внутри чередующихся рядов. Следовательно, все канальные группы, присвоенные рядам, расположенным непосредственно к северу или югу от объектного ряда, являются ортогональными к каждой канальной группе в объектном ряду. В соответствии с рассматриваемой процедурой, ячейки параллельных каналов сохраняют минимальное разделяющее расстояние, по меньшей мере равное диаметру одиночной ячейки 28.
На фиг. 12 показана блок-схема спутника 12, используемого в сети 10 (фиг. 1). В предпочтительном варианте осуществления все спутники 12 в сети 10 имеют, по существу, одну и ту же структуру для целей настоящего изобретения. Так, фиг. 12 может описать каждый спутник и все спутники 12. Спутник 12 содержит некоторое количество приемопередатчиков. Например, приемопередатчики 90 с перекрестными линиями связи создают линии связи между спутником 12 и другими ближайшими спутниками 12 (фиг. 1). Спутник 12 дополнительно содержит один или более приемопередатчиков 92 связи с Землей, которые обеспечивают связь с CSO 22 и GCS 24 (фиг. 1). Приемопередатчики 90 и 92 осуществляют связь через соответствующие антенны 94 и 96. Спутник 12 дополнительно содержит приемопередатчик 98 абонентского устройства. Приемопередатчик 98 осуществляет связь с абонентскими устройствами 26 через многолучевую многонаправленную антенну 100. Приемопередатчик 98 и антенна 100 могут быть поделены на некоторое число независимых каналов, сегментов или групп, так, чтобы образовались дискретные ячейки 28 и были обеспечены дискретные канальные группы.
Каждый из приемопередатчиков 90, 92 и 98, наряду с различными компонентами памяти и схемой синхронизации 102, подключен к контроллеру 104. Контроллер 104 может быть независимым, с использованием одиночного процессора или множества процессоров, работающих в параллельной архитектуре. В общем случае, контроллер 104 координирует работу и управляет приемо-передатчиками 90, 92 и 98, а также соединенными с ними антеннами, так, что спутник 12 принимает информационные сообщения от приемников разных линий связи и надлежащим образом распределяет принятые сообщения среди передатчиков для различных линий связи. Таймер 102 используется для синхронизации контроллера 104 и спутника 12 с временными ограничениями, накладываемыми сетью 10 (фиг. 1).
Компоненты памяти включают в себя таблицу 106 назначений ячеек. Таблица 106 связывает назначения канальных групп с идентификаторами ячеек в однозначном соответствии. В таблице 106 можно также регистрировать, если требуется, ячейки 28 в контуре 30 диаграммы направленности, генерируемом спутником 12, которые должны быть неактивными. Так, посредством выдачи номера ячейки в таблицу 106 можно получить канальную группу, назначенную идентифицированной ячейке, или данные, определяющие, является ли ячейка активной или неактивной. Канальную группу для назначений ячеек можно получить как описано вше в связи с фиг. 3-11. Кроме того, как отмечалось выше, каждая ячейка может иметь множество канальных групп, назначенных ей, с конкретными группами из множества канальных групп, ответственными за соответствующие позиции спутника 12 на его орбите 14. Так, в таблицу 106 назначений ячеек можно также записать временные данные, которые указывают, когда конкретные назначения канальных групп должны быть активными.
Компоненты памяти также включают в себя другую память 108. Память 108 содержит данные, которые служат командами для контроллера 104 и которые, когда исполняются процессором (процессорами) внутри контроллера 104, заставляют спутник 12 выполнять процедуры, которые описаны ниже. Память 108 также содержит другие переменные, таблицы и базы данных, которые обрабатываются в процессе работы спутника 12.
На фиг. 13 показана блок-схема алгоритма процедуры 110 управления, выполняемой одним спутником 12 в сети 10. процедура 110 заставляет спутник 12 синхронизироваться с внешним синхронизирующим сигналом. Для специалиста в данной области техники очевидно, что когда описывается процедура 110 для одного спутника 12, каждый спутник 12, по желанию, выполняет, по существу, ту же самую процедуру. Вообще говоря, процедура 110 управления включается, когда от GSC24 (фиг. 1) принимается команды TT&C. Команды TT&C могут включать в себя множество разных команд, такие, как, назовем несколько для примера, команды управления орбитой, команды диагностики, команды программирования.
Такие команды TT&C могут дополнительно включать в себя команды синхронизации. Когда обнаруживается команда синхронизации, как показано в задаче 112 запроса, программное управление извлекает данные из команды синхронизации и программирует таймер (схему синхронизации) 102 (фиг. 12) в ответ на данные синхронизации, содержащиеся в команде синхронизации согласно задаче 114. В предпочтительном варианте осуществления спутника 12 попадают в зону видимости GCS 24 каждые несколько витков орбиты. Таким образом, они могут синхронизировать свое внутренне время с системным временем сети 10 каждые несколько часов. Когда каждый спутник 12 выполняет, по существу, одну и ту же процедуру, внутренние схемы 102 синхронизации всех спутников 12 распознают заданный момент времени, по существу, одновременно. В предпочтительном варианте осуществление схемы 102 синхронизации всех спутников 12 остаются синхронизированными друг с другом в пределах 50 микросекунд. После синхронизации процедура 110 может перейти к другим TT&C - задачам, не связанным с настоящим изобретением. Благодаря работе процедуры 110, все спутники 12 в сети 10 распознают заданный момент времени, по существу, одновременно.
На фиг. 14 показана блок-схема алгоритма процедуры 116 прерывания схемы синхронизации, которая выполняется одним спутником 12 в сети 10. Процедура 116 заставляет спутник 12 изменять назначения канальных групп ячейкам, с которыми идет работа, на новую группу назначения. Хотя процедура 116 описана для одного спутника 12, каждый из спутников 12 обычно выполняет, по существу, ту же самую процедуру. Вообще говоря, процедура 116 прерывания схемы синхронизации включается в ответ на сигнал, подаваемый со схемы 102 синхронизации (фиг. 12). После начала процедуры 116, задача 118 переходит к следующему сегменту таблицы 106 назначений ячеек. Этот следующий сегмент включает в себя или идентификаторы канальных групп, подлежащих назначению каждой из спутниковых ячеек при появлении текущего события, или идентификаторы тех ячеек и канальных групп, которые могут измениться в результате текущего события.
После задачи 118 задача 120 заставляет спутники 12 установить связь с теми абонентскими устройствами 26 (фиг. 1), которые в данный момент поддерживает спутник 12.
В частности, спутник 12 информирует эти устройства 26 о текущем изменении в идентификаторах (идентичности) каналов, через которые осуществляется связь. Такие сеансы связи, касающиеся текущих изменений в идентификаторах каналов, называются "передаваемыми" сеансами связи. После задачи 120 задача 122 ждет до тех пор, пока подходит нужный момент. Этот конкретный момент представляет текущее событие, описанное выше в связи с задачей 118. Это заранее определенный момент, в который вплоть до всех спутников 12 в сети 10 происходит изменение их канальных групп для назначений ячеек, для компенсации перекрытия и перемещения контуров 30 их диаграмм направленности, когда они движутся по орбите вокруг Земли. Появление этого момента может определяться из схемы синхронизации (таймера) 102. Как обсуждалось выше, процедура 110 (фиг. 13) синхронизирует все спутники 12 так, что каждый спутник 12 распознает этот момент одновременно.
После задачи 122 задача 124 программирует приемопередатчик 98 абонентских устройств (фиг. 12) так, что его рабочее программирование переключается в соответствии со статусом активной/пассивный и данными назначений канальных групп, полученными выше в связи с задачей 118. После задачи 124 управление программой уходит из процедуры 116. Процедура 116 будет снова выполняться, когда спутник 12 достигнет точки орбиты, которая соответствует следующему сегменту таблицы 106 назначений (фиг. 12). До того, как процедура 116 будет исполняться снова, спутник 12 будет иметь связь через антенну 100 в соответствии с этой измененной канальной группой для назначений ячеек.
На фиг. 15-18 описывается второй вариант осуществления настоящего изобретения. Этот второй вариант осуществления отличается от первого варианта, назначением канальных групп тем контурам 30 диаграмм направленности (фиг. 2), которые расположены около стыка 16 (фиг. 1). Согласно первому варианту осуществления, обсуждавшемся выше, контуры 30 диаграммы направленности, расположенные в двух полусферах, могут использовать различные канальные группы для предотвращения взаимного влияния на стыке 16. В этом втором варианте осуществления одни и те же канальные группы могут назначаться в двух полусферах.
Другое отличие первого варианта осуществления от второго заключается в том, что согласно второму варианту осуществления моделируется (рассчитывается) намного больше канальных групп для каждой полной орбиты.
Согласно первому варианту осуществления задача 36 (фиг. 3) увеличивала моделируемую позицию для всех ячеек на расстояние, приблизительно эквивалентное диаметру ячеек. В данном втором варианте осуществления позиции для всех ячеек наращиваются на значительно меньшее расстояние. Например, позиции для спутников 12 могут рассчитываться на каждых 0,1o широты вокруг Земли. Это соответствует моделированию около 50-60 позиций для каждого диаметра ячейки, используя предпочтительный размер ячеек.
На фиг. 15 показана блок-схема алгоритма процедуры 34', используемой по второму варианту осуществления настоящего изобретения, в целях назначения конкретных канальных групп конкретным ячейкам 28. Процедура 34' выполняет подобные функции для процедуры 34, обсуждавшейся выше в связи с фиг. 3. Процедура 34' предпочтительно выполняется на компьютере общего назначения на станции управления, такой как GCS 24 (фиг. 1).
Процедура 34' выполняет задачу 126, для идентифицирования следующего момента времени, который должен рассчитываться для назначения канальных групп ячейкам. Когда процедура 34' рассчитывает позиции на каждых 0,1o широты вокруг Земли для спутников 12, которые могут двигаться при 25000 км/час, следующий момент времени наступает приблизительно через 1-2/3 секунды после предыдущего момента времени. Посредством многократного повторения задачи 126 в цикле (петле), образованном в процедуре 34', задача 126 идентифицирует серию последующих, появляющихся в дальнейшем, моментов времени.
После задачи 126 процедура 34' выполняет задачи 36, 40, 42 и 44, по существу, таким же способом, как и процедура 34, обсуждавшаяся выше (фиг. 3). В общем случае, задача 36 рассчитывает позиции для всех ячеек 28 в моменты времени, определенные в задаче 126. Задача 40 характеризует ячейки 28 в позициях, рассчитанных в задаче 36, как активные или неактивные для подсчета перекрытия между ячейками. Задача 42 назначает канальные группы в юго-северной полусфере, а задача 44 назначает канальные группы в северо-южной полусфере.
Посредством выполнения задач 42 и 44 по первому варианту осуществления, обсуждавшемуся выше, канальные группы назначаются всем активным ячейкам 28. В этом втором варианте осуществления задачи 42 и 44 воздерживаются от назначения канальных групп контурам 30 диаграмм направленности (фиг. 2), созданным спутниками 12, расположенными в орбитальной плоскости 14 смежно со стыком 16 (фиг. 1). Каждая из задач 42 и 44 использует процедуру 48' Назначения канальных групп, блок-схема алгоритма которой показана на фиг. 16.
Согласно фиг. 16, процедура 48' выполняется способом, подобным способу, описанному для процедуры 48 (фиг. 5). Как и в процедуре 48, задача 50 выбирает опорный контур 30a (фиг. 6) в опорной орбитальной плоскости 14a.
В предпочтительном варианте выбранный контур 30a диаграммы направленности является контуром, рассчитанным, как экваториально расположенный и смежный со стыком 16.
Процедура 48' далее выполняет задачу 52'. Задача 52' следует за планом назначения канальных групп, для предоставления канальных групп ячейкам 28, расположенным внутри опорного контура 30a диаграммы направленности. В этом втором варианте осуществления план назначений канальных групп, обсуждавшийся выше в связи с фиг. 5, использует записанное затравочное назначение канальной группы ячейки в опорном контуре 30a диаграммы направленности в качестве базового для назначений, выполняемых ячейкам 28 в контуре 30a диаграммы направленности. Как отмечалось выше, это затравочное назначение было записано из определения кратковременного назначения канал-ячейка, выработанного ранее для предыдущего момента времени, идентифицированного задачей 126 (фиг. 15). Таким образом, первоначальные назначения канальных групп, осуществленное задачей 52', основаны на назначениях канальных групп, сделанных в предыдущую итерацию для предыдущего момента времени. Это позволяет предоставить одни и те же канальные группы тем же самым ячейкам в этом определении кратковременных назначениях канал-ячейка, назначенных в выработанном ранее определении кратковременных назначений канал-ячейка в максимально возможной степени, поскольку ячейки теперь рассчитываются для размещения в новых позициях.
Поскольку задачи 52' процедура 48' выполняет задачи 66, 68, 72, 74, 76, 80, 81 и 84 таким же способом, как было описано выше согласно фиг.5. В общем случае, назначения канальных групп ячейкам распространяются на север и юг до тех пор, пока все контуры 30 диаграммы направленности в опорной орбитальной плоскости не будут назначены, а канальные группы распространяются от контуров 30 диаграмм направленности, смежных со стыком 16 по направлению к части стыка 16, которая расположена вне полусферы.
Задача 88 запроса определяет, повторить ли процесс назначения для другой орбитальной плоскости 14 контура 30 диаграммы направленности. Перед задачей 88' запроса задача 84 выбирает границу 86 (фиг. 10) между предварительно назначенной плоскостью контуров 30 диаграмм направленности и плоскостью контуров 30 диаграмм направленности, для которой канальные группы еще не были назначены. В данном втором варианте осуществления настоящего изобретения задача 88' определяет, является ли граница, следующая за только что выбранной границей 86, стыком 16. До тех пор, пока эта следующая граница не является стыком 16, программное управление возвращается назад к задаче 72, чтобы дать возможность процедуре 48' сделать назначения канальных групп ячейкам вплоть до границы 86, выбранной в задаче 84. Если этой следующей за только что выбранной границей 86 является стык 16, управление программы выходит из процедуры 48'. В первом варианте осуществления настоящего изобретения, согласно фиг. 5, задача 88 допускала наличие назначения канальных групп ячейкам вплоть до стыка 16. В данном вором варианте осуществления задача 88' останавливает процесс присвоения канальных групп ячейкам перед тем, как назначена плоскость контуров 30 диаграмм направленности, смежных со стыком 16.
Соответственно, после выполнения процедуры 48' в соответствии с задачами 42 и 44 (фиг. 15), назначения канальных групп ячейкам делаются на одной стороне стыка 16, идущего вокруг Земли. Однако канальные группы не назначаются ячейкам 28, расположенным в контурах 30 диаграмм направленности, которые смежны с противоположной стороной стыка 16.
Согласно фиг. 15, после задач 42 и 44 процедура 34' выполняет задачу 128 для назначения канальных групп неназначенным ячейкам 28 вблизи стыка 16 (фиг. 1). В задаче 128 используется процедура 130 назначения затравочных (начальных) канальных групп, блок-схема алгоритма которой показана на фиг. 7.
Согласно фиг. 17, процедура 130, в общем, организована для создания внутреннего цикла и присваивает канальные группы неназначенным контурам 30 диаграмм направленности, смежным со стыком (фиг. 1). С помощью внешнего цикла процедура 130 назначает канальные группы неназначенным контурам 30 диаграмм направленности внутри каждого контура 30 диаграммы направленности.
Процедура 130 выполняет задачу 132 для идентификации следующего контура 30 диаграммы направленности, смежного со стыком 16 (фиг. 1), который еще не имеет назначенных ему канальных групп. Конкретный контур 30 диаграммы направленности, выбранный, при наличии более одного неназначенного контура 30 диаграммы направленности, является несущественным. После того, как контур 30 диаграммы направленности выбран в задаче 132, задача 134 идентифицирует контуры диаграммы направленности, соседние с выбранным контуром. Соседними контурами диаграммы направленности являются контуры, которые расположены в пределах заранее определенного расстояния от выбранного контура диаграммы направленности. Предпочтительно, чтобы выбранное расстояние немного превышало диаметр выбранного контура 30 диаграммы направленности. Таким образом, при расчете выбранного контура 30 диаграммы направленности для размещения вблизи экватора, в задаче 134, для предпочтительной в данный момент геометрии орбиты идентифицируется шесть или семь соседних контуров 30 диаграммы направленности. Однако из-за схождения орбит 14 (фиг. 1), когда рассчитывается контур 30 диаграммы направленности для размещения вблизи полюсов, в задаче 134 идентифицируется до девятнадцати соседних контуров диаграмм направленности.
После задачи 134 задача 136 идентифицирует объектную ячейку из выбранных ячеек контура диаграммы направленности, которой еще не сделали назначение канальной группы. Предпочтительно, чтобы лишь ячейки 28, отмеченные как активные в соответствии с задачей 40 (фиг. 15), были выбраны в задаче 136, так, чтобы время обработки не тратилось на назначение канальных групп неактивным ячейкам. Не требуется никакого предпочтения какой-либо конкретной ячейке 28, когда более одной неназначенной ячейки и активной ячейки 28 указано в данный момент для контура 30 диаграммы направленности.
Далее, процедура 130 выполняет задачу 138 для идентификации активных ячеек, соседних с объектной ячейкой, выбранной выше в задаче 136. Желательно, чтобы лишь активные ячейки, как показано выполнением задачи 40 (фиг. 15), идентифицировались в задаче 138 для сохранения времени обработки. Область поиска идентифицируемых соседних ячеек может быть ограничена контуром диаграммы направленности, выбранным в задаче 132 и соседними контурами диаграммы направленности, идентифицированными в задаче 134.
После задачи 138 задача 140 оценивает назначения канальных групп, если требуется, для активных соседних ячеек, идентифицированных выше в задаче 138. Оценка задачи 140 при проверке назначений, сделанных соседними ячейками, состоит в поиске по меньшей мере двух признаков. Во-первых, оценка задачи 140 определяет идентификаторы канальных групп, если таковые имеются, которым не было сделано назначение в соседних ячейках. Во-вторых, оценка задачи 140 определяет самое отдаленное назначение канальной группы. Другими словами, задача 140 идентифицирует канальную группу, ячейки которой, ближайшие к объектной (рабочей) ячейке, находятся на максимальном расстоянии от объектной ячейки.
После задачи 140 задача 142 запроса определяет, обнаружила ли оценка задачи 140 неназначенные канальные группы. Если в задаче 140 были обнаружены неназначенные канальные группы, задача 144 использует процесс, по существу случайного выбора, чтобы выбрать одну из этих неназначенных групп для назначения рабочей ячейки. Любые из неназначенных канальных групп могут использоваться в рабочей ячейке, не вызывая взаимодействия с уже назначенными канальными группами. Чисто случайная процедура выбора, используемая задачей 144, не является критическим признаком настоящего изобретения, и генераторы случайных чисел, обычно используемые в компьютерных программах, могут применяться при случайном выборе одной из неназначенных канальных групп. Очевидно, что если во время задачи 140 обнаружена лишь одна неназначенная группа, эта одна группа выбирается для присвоения рабочей ячейке.
Если неназначенная канальная группа не обнаружена в процессе оценки задачи 140, то задача 142 запроса передает управление программой задаче 146. Задача 146 выбирает самую отдаленную канальную группу, назначенную соседним ячейкам, для предоставления рабочей ячейке. Посредством выбора назначения самой отдаленной канальной группы минимизируется взаимное влияние.
После задачи 144 или 146 задача 148 назначает выбранную канальную группу рабочей ячейке. Как отмечалось выше со ссылкой на фиг. 5, это назначение может сопровождаться записью соответствующих вхождений в таблицу 38 позиций (фиг. 4).
Далее вопросная задача 150 определяет, не назначены ли уже канальные группы другим ячейкам в выбранном контуре 30 диаграммы направленности. Задача 150 может, для экономии времени, по необходимости ограничивать свои запросы лишь активными ячейками. Если в выбранном контуре диаграммы направленности остаются неназначенные активные ячейки, управление программой замыкается снова на задачу 136, образуя выше упоминавшийся внутренний цикл. Управление программой замыкается через задачи 136, 138, 140, 142, 144 или 146, 148 и 150 до тех пор, пока всем активным ячейкам 28 в выбранном контуре 30 диаграммы направленности не будут назначены канальные группы.
Когда задача 150 определяет, что все активные ячейки 28 в выбранном контуре диаграммы направленности получили назначение канальных групп, вопросная задача 152 определяет, остались ли другие неназначенные группы. Когда в таблице 38 (фиг. 4) позиций существуют контуры 30 контуры 30 диаграмм направленности без назначенных канальных групп, управление программой зацикливается обратно на задачу 132, образуя вышеобсуждающийся внешний цикл. Управление программой остается внутри этого внешнего цикла до присвоения канальных групп всем активным ячейкам 28 во всех ранее неназначенных контурах 30 диаграмм направленности. Когда не остается неназначенных контуров 30 диаграмм направленности, управление программой выполняет внешний цикл и процедуру 130 задачи 152.
Согласно фиг. 5, после того, как задача 128 и процедура 130 (фиг. 17) назначат канальные группы около стыка 16, процедура 34' выполняет задачу 154. Задача 154 идентифицирует одну или более конкретных ячеек 28 конкретных контуров 30 диаграммы направленности, назначения каналов которых будут использоваться для затравочного (начального) назначения, упоминаемого выше в связи с задачей 52' (фиг. 16). Указанные начальные ячейки 28 могут, например, быть ячейками 28, которые обсчитываются для размещения наиболее близко к заранее определенной широте около экватора в контуре 30 диаграммы направленности, смежном со стыком 16. Когда эти начальные ячейки 28 определены, задача 154 записывает сделанные им назначения канальных групп для использования в последующем кратковременном определении назначений канал - ячейка. В последующем определении назначений все назначения канальных групп будут отвечать этим начальным назначениям, чтобы уменьшить изменения назначений канальных групп от одного определения назначения к другому.
Одновременно формируется кратковременное определение назначения канал-ячейка для следующего момента времени, определенного выше в задаче 126. Далее задача 46 запроса определяет, обсчитаны ли все орбитальные позиции для спутников 12, как обсуждалось выше в связи с фиг. 3. До тех пор, пока вся орбита не будет обсчитана, управление программой замыкается на задачу 126, чтобы генерировать кратковременные определения назначения канал - ячейка для последующих моментов времени. Как показано на фиг. 4, каждое из этих кратковременных определений назначений канал-ячейка может быть сохранено в соответствующем сегменте 156 таблицы 38 позиций.
Специалист в данной области техники может оценить, что при одной установке может рассчитываться любое число будущих моментов времени и что вся орбита, для которой задача 46 выполняет проверку, выбирается в значительной мере произвольно. Когда задача 46 определяет, что требуемое число кратковременных определений назначений канал - ячейка сформировано для всей орбиты или частично, управление программой передается в задачу 158.
Задача 158 оценивает кратковременные определения назначений, записанные в таблице 38 позиций (фиг. 4), для обнаружения изменений в назначениях канальных групп от одного определения назначения до другого. Как показано в вопросной задаче 160, при обнаружении изменения назначения канальной группы в конкретной ячейке 28 конкретного контура 30 диаграммы направленности, задача 162 запоминает идентификатор ячейки 28, включая связанный с ней контур 30 диаграммы направленности и/или спутник 12, момент времени, в который изменение зарегистрировано как имевшее место, и новую канальную группу, назначенную ячейке 28 в указанный момент времени. Эти данные могут быть запомнены в таблице 164 плана назначений канал - ячейка спутника, схема которой показана на фиг. 18.
Как показано на фиг. 18, таблица 164 может включать в себя сегмент 166 для данных, которые связаны с каждым из спутников 12. Согласно фиг. 15, после задачи 162 или когда задача 160 определяет, что задача 158 не обнаружила изменения назначения канала, задача 168 запроса определяет, завершена ли оценка кратковременного определения назначений канал-ячейка. Если не завершена, управление программой замыкается обратно на задачу 158 и остается в цикле, состоящем из задач 158, 160 и 162, до тех пор, пока все кратковременные определения назначений канал-ячейка не будут оценены.
После завершения оценки задача 170 связывает планы назначений канал - ячейка из таблицы 164 (фиг. 18) с соответствующими им спутниками 12. Эта связь может иметь место через созвездие спутников 12. Связь может иметь место перед реальным появлением моментов времени, идентифицированных выше в задаче 126. Как отмечалось выше, каждый спутник 12 желательно должен сохранить свой план назначений канал - ячейка в своей таблице 106 (фиг. 12) назначений. Эти временные данные, включенные в план назначений, желательно использовать для программирования схемы 102 синхронизации спутника (фиг. 12), так, что процедура 116 (фиг. 14) прерывания схемы синхронизации осуществляла изменения в указанные моменты времени.
В итоге, настоящее изобретение предлагает улучшенную систему связи. Настоящее изобретение относится к сотовой системе связи, которая эффективно повторно использует спектр на протяжении сферической поверхности, такой, как поверхность Земли. Спектр эффективно используется, поскольку назначение канальных групп ячейкам выполняется способом, который распознает перекрытие между контурами диаграмм направленности, отмечает определенные перекрытые ячейки как неактивные и присваивает канальные группы активным ячейкам способом, который является чувствительным к неактивным ячейкам. Кроме того, в соответствии с настоящим изобретением маркировка определенных перекрытых ячеек как неактивных и назначение канальных групп активным ячейкам время от времени повторяется для компенсации динамичных изменений, происходящих в перекрытии. Кроме того, одни и те же канальные группы (группы каналов) могут использоваться даже в зонах покрытия, которые находятся поблизости от стыка между спутниками, движущимися по орбите в противоположных направлениях. Настоящая система связи уменьшает сеансы связи, требуемые для динамического назначения дискретных участков спектра ячейкам, посредством минимизации изменений назначений канальных групп ячейкам и посредством передачи на спутники только изменений назначений.
Настоящее изобретение, описано выше со ссылкой на предпочтительные варианты осуществления. Однако для специалиста в данной области техники очевидно, что в предпочтительных вариантах осуществления могут быть сделаны изменения и модификации, не выходя за пределы настоящего изобретения. Например, могут быть предложены другие альтернативные процедуры для выполнения, по существу, тех же самых функций, что описанные выше. Могут использоваться структуры памяти, отличающиеся от тех, что использованы в данном изобретении. Кроме того, хотя предпочтительные варианты осуществления, описанные в данной заявке, относятся к конкретным случаям орбитальной геометрии, геометрии контуров диаграмм направленности и размерам канальных групп, специалист в данной области техники может оценить, что настоящее изобретение может применяться к различным геометриям и размерам канальных групп. Эти и другие изменения и модификации, которые очевидны специалисту в данной области техники, предполагаются находящимися в рамках настоящего изобретения.
Орбитальные спутники проектируют контуры диаграмм направленности на землю. Каждый контур (30) диаграммы направленности делят на ячейки. Контуры диаграмм направленности соседних спутников перекрывают друг друга, и перекрытие увеличивается, когда спутники приближаются от экватора к полюсу. Позиции всех ячеек, генерируемых всеми спутниками, моделируют множеством точек по всей орбите. Группы каналов присваивают всем ячейкам в пределах опорного контура диаграммы направленности. Указанное присвоение распространяется на все контуры диаграмм направленности, за исключением тех контуров (30), которые примыкают к одной стороне стыка между орбитами, где спутники движутся в противоположных направлениях. Группы каналов присваивают вблизи стыка в ответ на ранее присвоенные группы каналов. Каждый спутник запоминает присвоения канальных групп для его ячеек в разных точках по всей орбите. Все спутники переключают свои параметры связи одновременно в ответ на присвоения канальных групп. Достигаемым техническим результатом является то, что в настоящем изобретении многократно используют спектр на сферической поверхности, такой, как например, поверхность земли, для увеличения мощности канала, задающей фиксированный частотный спектр. 3 с. и 21 з.п. ф-лы, 18 ил.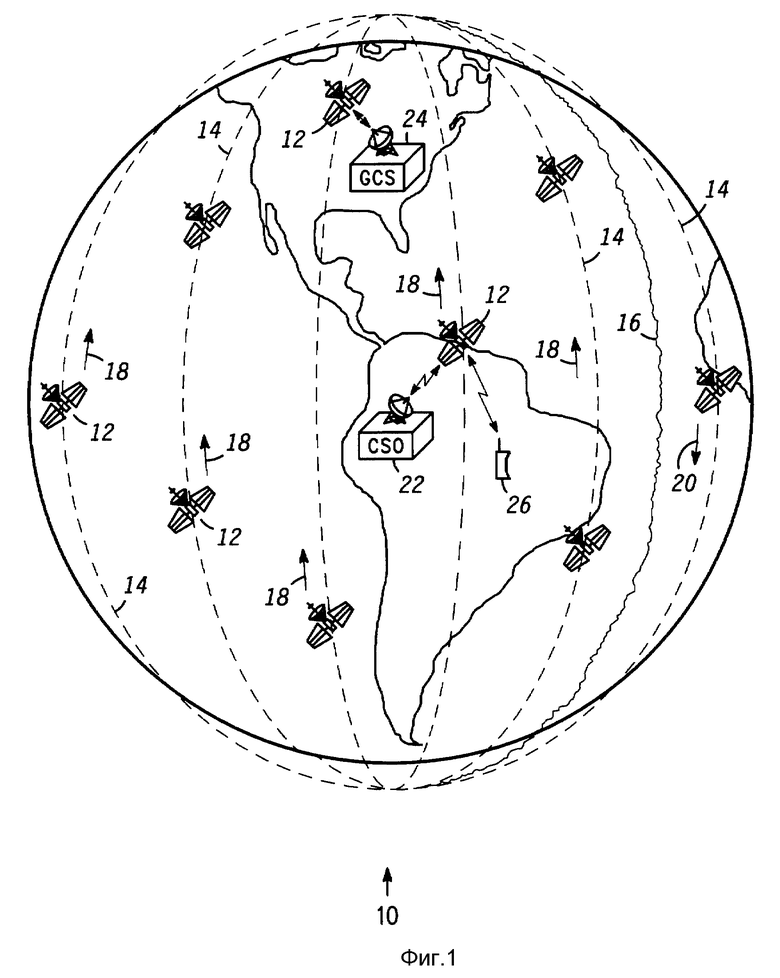
| WO 9108621 A, 13.06.91 | |||
| US 4872015 A, 03.10.89 | |||
| Спутниковая информационная система | 1991 |
|
SU1801249A3 |
