Изобретение относится к нефтедобывающей промышленности и может быть использовано при управлении работой нефтяных скважин, оборудованных штанговыми насосными установками.
Известен способ управления глубинно-насосной установкой нефтяных скважин, предусматривающий автоматический контроль (измерение) положения полированного штока, усилия в точке подвеса колонны штанг, определение максимальных и минимальных значений положения и усилия в цикле качания, сравнение указанных величин с заданными предельно допустимыми значениями и автоматическую остановку установки при превышении допусков, ручное управление длительностью пауз периодического режима работы установки для регулирования динамического уровня жидкости в стволе скважины (Проспект фирмы "Baker CAC", США, 1993. Контроллер штангового глубинного насоса фирмы Baker модели 8800 RPC).
Недостатком данного способа является отсутствие автоматического управления заданной длительностью паузы в работе установки. По этой причине не удается обеспечить при длительной автономной работе установки выполнение условий оптимального заполнения жидкостью ствола скважины.
Работа насоса при недостаточном заполнении приводит к его быстрому износу и возможному разрушению призабойной зоны, а при чрезмерном заполнении снижается приток жидкости из пласта и уменьшается фактическая продуктивность скважины. Кроме того, при произвольно меняющейся глубине заполнения скважины не обеспечивается качественная балансировка привода, что приводит к его перегрузкам и преждевременному износу.
Указанных недостатков лишен способ управления глубинно-насосной установкой нефтяных скважин, включающий контроль изменений усилий в точке подвеса колонны насосных штанг, задание уставки динамического уровня жидкости в стволе скважины выше уровня приема насоса, приложение дополнительных усилий и отключение установки на момент действия этих дополнительных усилий (СССР, а.с. 1121401, кл. E 21 B 43/00,1984, прототип).
Такой способ позволяет автоматически регулировать динамический уровень жидкости в стволе скважины при произвольно заданном динамическом уровне уставки.
Однако из-за усложненной конструктивной подземной части насоса такой способ имеет невысокую надежность и сложен в настройке при эксплуатации.
Задача, на решение которой направлено изобретение, заключается в увеличении срока службы глубинно-насосных установок нефтяных скважин и снижении эксплуатационных затрат.
Технический результат, достигаемый от реализации способа по изобретению, состоит в повышении надежности работы системы управления и установки в целом.
Технический результат достигается за счет того, что в способе управления глубинно-насосной установкой нефтяной скважины, включающем контроль изменений усилий в точке подвеса колонны насосных штанг, задание уставки динамического уровня жидкости в стволе скважины выше уровня приема насоса и периодические отключения установки для накопления жидкости в стволе скважины, дополнительно контролируют наличие вращения двигателя, замеряют положения полированного штока. По результатам замеров рассчитывают крайнее верхнее и крайнее нижнее положения хода штока. В момент приближения к крайнему нижнему и крайнему верхнему положению хода полированного штока производят плавный останов двигателя установки с выдержкой в этих положениях в течение 1-2 с. По завершении выдержки осуществляют плавный запуск двигателя. Значения усилий в точке подвеса колонны насосных штанг фиксируют перед плавным запуском двигателя и в момент смены знака направления движения (хода) полированного штока после запусков двигателя установки. По зафиксированным значениям усилий рассчитывают средние значения усилий в крайнем верхнем и крайнем нижнем положениях штока. Динамический уровень жидкости в стволе скважины рассчитывают по формуле ,
,
где
Hd - динамический уровень жидкости в стволе скважины;
Pср.в. и Pср.н - средние значения усилий соответственно в крайнем верхнем и крайнем нижнем положениях полированного штока;
Fпл - площадь поперечного сечения плунжера насоса;
ρж - - плотность жидкости;
g - ускорение свободного падения.
Рассчитанный таким образом динамический уровень жидкости в стволе скважины сравнивают с заданным значением динамического уровня (уровнем уставки) и в зависимости от их разности регулируют длительность пауз (остановок) для накопления жидкости в стволе нефтяной скважины.
Сущность изобретения основывается на использовании при управлении глубинно-насосной установкой зависимости разности статических составляющих усилий в точке подвеса колонны штанг в моменты приближения к крайнему верхнему и крайнему нижнему положениям хода полированного штока от величины уровня жидкости в затрубном пространстве скважины (динамического уровня).
Дополнительный контроль наличия вращения двигателя позволяет точно фиксировать моменты остановки для обеспечения выдержек времени перед фиксацией значений усилий. Если выдержка будет менее 1 с, то не успевают затухнуть динамические составляющие усилия. При выдержке более 2 с появляется опасность открывания клапанов насоса, что сказывается на точности определения динамического уровня жидкости в стволе скважины и приводит к перегреву двигателя установки, в конечном итоге снижается надежность работы системы управления и установки в целом.
Замер положений полированного штока позволяет определять его крайнее верхнее и крайнее нижнее положения и рассчитать промежуточные значения положения штока для определения моментов начала торможения для осуществления плавных остановок двигателя.
При нормальной работе установки прямое измерение указанных статических усилий невозможно из-за наличия динамических (инерционной и вибрационной) составляющих усилия, а также силы трения. За счет же осуществления плавных остановок в моменты приближения к крайнему верхнему и крайнему нижнему положениям штока и последующей временной выдержки в данном способе обеспечивается исключение влияния динамических (инерционной и вибрационной) составляющих усилия, а за счет усреднения значений усилий, зафиксированных в конце временной выдержки перед плавным пуском и значением усилия, зафиксированным в момент смены знака направления движения штока после плавного пуска, обеспечивается исключение составляющей усилия, обусловленной влиянием трения, повышается точность расчетов и надежность работы системы управления и установки.
Определение динамического уровня жидкости в стволе скважины по приведенной выше формуле и сравнение его с заданным динамическим уровнем уставки позволяют с высокой точностью и надежностью управлять длительностью пауз для накопления жидкости, т.е. управлять режимом периодической откачки жидкости из скважины.
Способ поясняется чертежом, где изображена функциональная схема реализации изобретения.
Схема представляет собой алгоритм функционирования управляющего контроллера, который содержит блок 1, блок 2 со счетчиком циклов качания установки, блок управления 3, блок управления приводом 4, блоки фиксации усилий 5, 6, 7, 8, сумматоры усилий 9 и 10, блок расчета 11 динамического уровня жидкости, автоматический регулятор 12, таймер 13.
Способ реализуется следующим образом.
При работе глубинно-насосной установки нефтяной скважины в режиме качания блоком 1 осуществляют определение крайнего верхнего и крайнего нижнего положений полированного штока по сигналам S с датчика (не показан). По этим значениям сигналов S блок 1 рассчитывает точки положения штока, в которых начинают плавное торможение во время циклов контроля (КЦ) статических усилий для остановок вблизи крайней верхней и крайней нижней точек (положениях) хода штока.
В моменты прохождения штоком указанных расчетных точек в блоке 1 управляющего контроллера происходит формирование соответственно импульсов Дв и Дн. Сформированный импульс Дв поступает в блок управления 3, с выхода которого выдается сигнал плавного останова двигателя в блок управления приводом 4. В момент остановки двигателя сигнал скорости двигателя (ωд), подаваемый в блок 3, становится равным нулю (ωд = 0), и в блоке управления 3 начинается отсчет времени выдержки в этом положении на 1-2 с. При окончании выдержки блок 3 выдает импульс в блок фиксации 5 для разрешения запоминания значения усилия Рв в этот момент времени.
Аналогичным образом осуществляют блоком фиксации 7 запоминание усилия (Рн) после остановки двигателя вблизи крайней нижней точки хода штока и выдержки в этом положении в течение 1 - 2 с. После прохождения штоком крайней верхней точки в момент изменения знака направления движения штока на противоположное блок 1 выдает импульс Д'в в блок управления 3, где формируется импульс фиксации значения усилия в этой точке и в данный момент времени, который поступает затем в блок фиксации 6. В блоке 6 происходит запоминание значения усилия в этот момент времени - Р'в. Аналогично происходит запоминание усилия Р'н после прохождения штоком крайней нижней точки.
Из блоков 5 и 6 значения усилий Pв и Р'в подаются в сумматор 9, а из блоков 7 и 8 значения усилий Pн и Р'н поступают в сумматор 10. В сумматорах 9 и 10 происходит расчет средних значений усилий в крайнем верхнем и крайнем нижнем положениях штока (Pср.в и Рср.н соответственно). По рассчитанным значениям Рср.в и Рср.н блоком 11 производится расчет динамического уровня жидкости в стволе скважины (Hd) по формуле
расчетное значение Hd поступает в автоматический регулятор 12, где происходит его сравнение с заданным динамическим уровнем уставки, который устанавливается таким, чтобы при его достижении исключалась возможность незаполнения насоса при его нормальной работе.
По разности этих динамических уровней регулятор 12 формирует длительность паузы для накопления жидкости в стволе скважины.
Момент начала паузы определяется по сигналу от таймера 13, определяющего цикл периодической откачки жидкости из ствола скважины. По сигналу таймера 13 регулятор 12 выдает сигнал остановки на паузу в блок управления приводом 4.
По окончании паузы регулятор 12 выдает сигнал блоку 4 на пуск двигателя.
Определение расчетного значения динамического уровня жидкости в стволе скважины производят периодически.
Периодичность таких определений (контрольных циклов) задают блоком 2.
Во время прохождения штока крайнего нижнего положения его хода в блоке 1 формируется импульс Dmin, поступающий на блок 2, где производится подсчет количества циклов качания установки, выполненных после завершения очередного контрольного цикла. При накоплении в блоке 2 числа циклов (N), равных заданному количеству циклов (Nk), блок 2 выдает в блок управления 3 сигнал КЦ (фиг. 1) для начала очередного контрольного цикла. После завершения контрольного цикла блок 3 выдает сигнал ККЦ (конец контрольного цикла) на блок 2 для установки счетчика циклов блока 2 в начальное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ШТАНГОВОЙ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 1999 |
|
RU2163658C2 |
| СПОСОБ УПРАВЛЕНИЯ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 2003 |
|
RU2242587C1 |
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ШТАНГОВОЙ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 2003 |
|
RU2242588C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2721068C1 |
| Скважинная штанговая насосная установка | 2020 |
|
RU2727833C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2715120C1 |
| ГЛУБИННО-НАСОСНАЯ ШТАНГОВАЯ УСТАНОВКА | 2001 |
|
RU2205979C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2721067C1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2016 |
|
RU2613477C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ СКВАЖИННОГО ГЛУБИННОНАСОСНОГО ОБОРУДОВАНИЯ | 1999 |
|
RU2168653C2 |
Изобретение относится к нефтедобывающей промышленности и может быть использовано при управлении работой нефтяных скважин, оборудованных штанговыми глубинно-насосными установками. Способ включает контроль изменений усилий в точке подвеса насосных штанг, задание уставки динамического уровня жидкости в стволе скважины выше уровня приема насоса и периодические отключения установки для накопления жидкости. Дополнительно осуществляют контроль за вращением двигателя. Замеряют положения полированного штока колонны насосных штанг и рассчитывают его крайнее верхнее (КВП) и крайнее нижнее (КНП) положения. В моменты приближения к КВП и КНП хода штока производят плавный останов двигателя Д и выдержку в этих положениях в течение 1-2 с. После выдержек двигатель плавно запускают. Значения усилий фиксируют перед плавным запуском двигателя Д и в момент смены знака направления движения штока после его запусков. По зафиксированным значениям усилий рассчитывают средние значения усилий в КВП и КНП, затем определяют динамический уровень жидкости по приведенной формуле. Технический результат от реализации способа состоит в повышении надежности работы системы управления и установки в целом. 1 ил.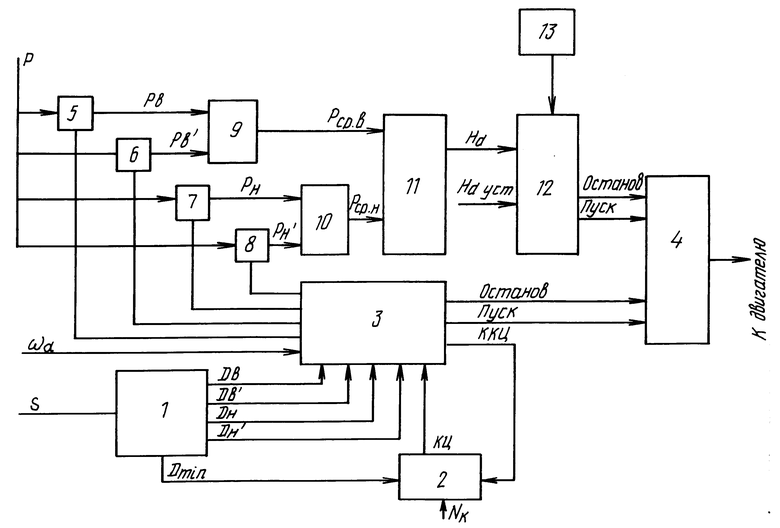
\ \ \1 Способ управления глубинно-насосной установкой нефтяной скважины, включающий контроль изменений усилий в точке подвеса колонны насосных штанг, задание уставки динамического уровня жидкости в стволе скважины выше уровня приема насоса и периодические отключения установки для накопления жидкости в стволе скважины, отличающийся тем, что дополнительно контролируют наличие вращения двигателя, замеряют положения полированного штока, рассчитывают его крайнее верхнее и крайнее нижнее положения, в моменты приближения к крайнему нижнему и крайнему верхнему положениям хода полированного штока производят плавный останов двигателя установки, осуществляют выдержку в этих положениях в течение 1 - 2 с и плавный запуск двигателя, значения усилий в точке подвеса колонны насосных штанг фиксируют перед плавным запуском двигателя и в момент смены знака направления движения полированного штока после запуска, по зафиксированным значениям усилий рассчитывают средние значения усилий в крайнем верхнем и крайнем нижнем положениях штока, затем определяют динамический уровень жидкости в стволе скважины по формуле \\\6 $$$ \\\1 где H<Mv>d<D> - динамический уровень жидкости в стволе скважины; \\\4 P<Mv>ср.в. <D> - среднее значение усилия в крайнем верхнем положении штока; \\\4 P<Mv>ср.н<D> - среднее значение усилия в крайнем нижнем положении штока; \\\ 4 F<Mv>пл<D> - площадь поперечного сечения плунжера насоса; \\\4 $$$ плотность жидкости в стволе скважины; \\\4 q - ускорение свободного падения, \\\ 1 и по отклонению данного значения от уровня установки регулируют длительность паузы для накопления жидкости в стволе скважины.
| Способ приготовления консистентных мазей | 1924 |
|
SU8800A1 |
| SU, авторское свидетельство, 1121401, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
