Известен способ управления глубинно-насосной установкой нефтяных скважин, предусматривающий автоматический контроль (измерение) положения полированного штока, усилия в точке подвеса колонны штанг, определение максимальных и минимальных значений положения и усилия в цикле качания, сравнение указанных величин с заданными предельно допустимыми значениями и автоматическую остановку установки при превышении допусков, ручное управление длительностью пауз периодического режима работы установки для регулирования динамического уровня жидкости в стволе скважины. (Проспект фирмы "Baker CAC", США, 1993. Контроллер штангового глубинного насоса фирмы Baker модели 8800 RPC).
Недостатком данного способа является отсутствие автоматического управления продолжительности паузы в работе установки. По этой причине не удается обеспечить при длительной автономной работе установки выполнение условий оптимального заполнения жидкостью ствола скважины. Работа насоса при недостаточном заполнении приводит к его быстрому износу и возможному разрушению призабойной зоны, а при чрезмерном заполнении снижается приток жидкости из пласта и уменьшается фактическая продуктивность скважины.
Кроме того, при произвольно меняющейся глубине заполнения скважины не обеспечивается качественная балансировка привода, что приводит к его перегрузкам и преждевременному износу.
Указанного недостатка лишен способ управления глубинно-насосной установкой нефтяных скважин, предусматривающий вычисление уровня жидкости в стволе скважины по средним значениям усилий в момент останова в крайней верхней и в крайней нижней точках и автоматическое регулирование продолжительности паузы на основании сравнения с уставкой вычисленного значения уровня (Россия, патент №2118443, кл. Е 21 В 43/00, 1996, прототип). При этом уровень вычисляется по формуле
где Hd - динамический уровень жидкости в стволе скважины;
Рср.в - среднее значение усилия в крайнем верхнем положении штока;
Рср.н - среднее значение усилия в крайнем нижнем положении штока;
Fпл - площадь поперечного сечения плунжера насоса;
ρж - плотность жидкости в стволе скважины;
g - ускорение свободного падения.
Для определения среднего значения усилия Рср.в предлагается периодически, прибегая к торможению, по достижении полированным штоком крайней верхней точки останавливать установку и после паузы в 1,5-2 с проводить замер усилия Рв. Затем выполнять пуск установки и проводить замер усилия Рв' сразу после смены знака направления движения полированного штока. По значениям Рв и Рв' находится среднее усилие Рср.в. Аналогичные действия выполняются для определения Рср.н. Указанная последовательность операций в данном способе получила название “контрольный цикл”. Целесообразность остановов установки для замеров усилий в штоке обусловливается требованием исключения динамических составляющих усилий (инерционной и вибрационной), не учитываемых в приведенной выше формуле.
Недостатком данного способа является необходимость периодических остановов с торможением установки и удержания ее в крайних точках для измерения усилия и расчета динамического уровня на контрольном цикле. Это приводит к дополнительному износу оборудования и увеличению потребления электроэнергии.
Задача, на решение которой направлено изобретение, заключается в повышении производительности, увеличении срока службы насосных установок нефтяных скважин и снижении эксплуатационных затрат.
Поставленная задача решается за счет того, что в известном способе управления глубинно-насосной установкой нефтяной скважины, включающем контроль изменений усилий в точке подвеса колонны насосных штанг, измерение положения полированного штока, определение его крайних верхних и нижних положений, задание уставки динамического уровня жидкости в стволе скважины выше уровня приема насоса и периодические отключения установки для накопления жидкости в скважине, дополнительно задают время цикла периодической откачки жидкости из ствола скважины и фиксируют при прохождении крайних верхних и крайних нижних положений хода полированного штока значения усилий в точке подвеса колонны насосных штанг перед сменой и сразу после смены направления движения полированного штока, по зафиксированным усилиям находят средние значения усилий в крайнем верхнем и крайнем нижнем положениях штока, после чего определяют динамический уровень жидкости в стволе скважины по формуле
где Hd - динамический уровень жидкости в стволе скважины;
Рср.в - среднее значение усилия в крайнем верхнем положении штока;
Рср.н - среднее значение усилия в крайнем нижнем положении штока;
Fпл - площадь поперечного сечения плунжера насоса;
ρж - плотность жидкости в стволе скважины;
g - ускорение свободного падения;
Hk - поправочная константа установки, позволяющая учесть измерительную погрешность расчетного уровня, обусловленную влиянием динамических составляющих усилий в штоке.
Рассчитанный таким образом динамический уровень жидкости в стволе скважины сравнивают с заданным значением динамического уровня (уровнем уставки) и в зависимости от их разности корректируют длительность паузы в работе установки на заданном времени цикла периодической откачки, необходимой для накопления жидкости в стволе нефтяной скважины.
Сущность изобретения основывается на использовании при управлении глубинно-насосной установкой зависимости разности статических составляющих усилий в точке подвеса колонны штанг в моменты прохождения крайнего верхнего и крайнего нижнего положений полированного штока от величины уровня жидкости в затрубном пространстве скважины (динамического уровня). Замер положений полированного штока позволяет определять его крайнее верхнее и крайнее нижнее положения и рассчитать промежуточные значения положения штока для определения моментов смены знака перемещения штока для осуществления замеров усилий на штоке.
За счет усреднения значений усилий, зафиксированных по достижении крайней точки, и значений усилий, зафиксированных в момент смены знака направления движения штока, обеспечивается исключение составляющей усилия, обусловленной влиянием трения, повышается точность расчетов и надежность работы системы управления и установки.
Для исключения влияния динамических (инерционной и вибрационной) составляющих усилия, условно постоянных для выбранного режима работы, в формулу вводится поправочная константа Hk, определяемая при наладке установки. В частном случае (при слабом влиянии динамики) она может быть равна нулю.
Определение динамического уровня жидкости в стволе скважины по приведенной выше формуле и сравнение его с уставкой позволяют с высокой точностью и надежностью устанавливать продолжительность работы и паузы на заданном времени цикла периодической откачки с целью поддержания динамического уровня, т.е. управлять производительностью установки и режимом периодической откачки жидкости из скважины. Отметим, что определение динамического уровня жидкости в скважине происходит без остановки привода, что позволяет исключить дополнительные пуско-тормозные потери и уменьшить износ оборудования.
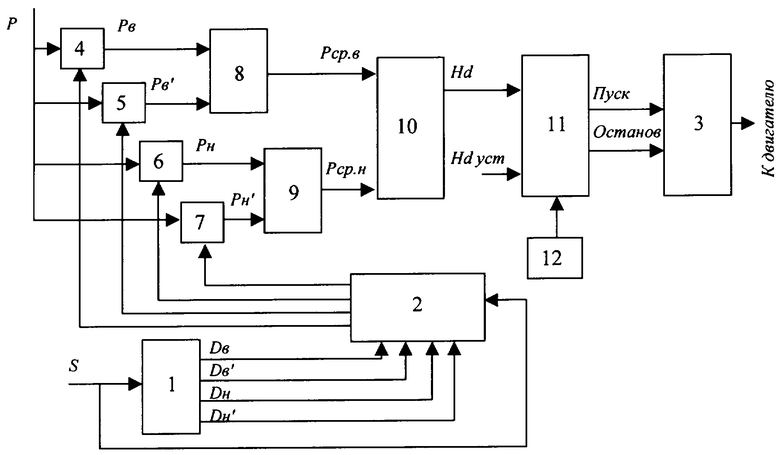
Способ поясняется чертежом, где изображена функциональная схема реализации изобретения.
Схема представляет собой алгоритм функционирования управляющего контроллера, который содержит блок слежения за положением штока 1, блок управления фиксаторами усилий 2, блок управления приводом 3, блоки фиксации усилий 4, 5, 6, 7, блоки расчета средних усилий 8 и 9, блок расчета динамического уровня жидкости 10, автоматический регулятор уровня 11, таймер 12.
Способ реализуется следующим образом. При работе глубинно-насосной установки нефтяной скважины в режиме качания блоком слежения 1 осуществляют определение крайнего верхнего и крайнего нижнего положений полированного штока по сигналу S от датчика положения (не показан). В моменты прохождения штоком указанных точек в блоке 1 происходит запоминание соответственно позиций Dв и Dн, а в моменты смены направления движения штока сразу после прохождения крайних точек - запоминание позиций Dв' и Dн'. Далее в блоке управления фиксаторами усилий 2 текущее положение штока S сравнивается с позицией Dв. В момент равенства из блока 2 подается сигнал на фиксатор 4. В блоке 4 происходит запоминание усилия в крайней верхней точке Рв. Аналогично по достижении соответствующих позиций происходит запоминание усилий Рв', Рн, Рн' в фиксаторах 5, 6 и 7 соответственно.
Из блоков 4 и 5 значения усилий Рв и Рв' подаются в блок расчета среднего усилия 8, а из блоков 6 и 7 значения усилий Рн и Рн' подаются в блок расчета среднего усилия 9. В данных блоках выполняется расчет средних усилий в крайнем верхнем и крайнем нижнем положениях штока (Pср.в и Рср.н соответственно). По рассчитанным значениям Рср.в и Рср.н блоком 11 производят расчет динамического уровня жидкости в стволе скважины по формуле
Поправочная константа Hk позволяет учесть влияние инерционной составляющей усилий в крайних точках и определяется экспериментально при наладке установки. В частном случае Hk=0.
Расчетное значение Hd поступает в автоматический регулятор 11, где происходит его сравнение с заданным динамическим уровнем уставки, который устанавливается таким, чтобы при его достижении исключалась возможность незаполнения насоса при его нормальной работе.
Автоматический регулятор уровня 11 работает по принципу широтно-импульсной модуляции. По разности заданного и реального динамических уровней формируется продолжительность работы и паузы привода на заданном времени цикла периодической откачки жидкости из ствола скважины. Момент начала паузы определяется по сигналу от таймера 12, определяющего цикл периодической откачки жидкости из ствола скважины. По сигналу от таймера 12 регулятор 11 выдает сигнал остановки на паузу в блок управления приводом 3. По окончании паузы регулятор 11 выдает сигнал блоку 3 на пуск двигателя.
Определение расчетного динамического уровня жидкости в стволе скважины производят на каждом цикле качания, что позволяет снизить влияние вычислительного запаздывания на автоматический регулятор уровня 11.
Технический результат, достигаемый от реализации способа по изобретению, состоит в повышении производительности и надежности работы глубинно-насосной установки нефтяной скважины в целом, за счет непрерывного контроля и поддержания заданного значения динамического уровня жидкости в стволе скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 1996 |
|
RU2118443C1 |
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ШТАНГОВОЙ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 2003 |
|
RU2242588C1 |
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ШТАНГОВОЙ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 1999 |
|
RU2163658C2 |
| Устройство для автоматического управления глубиннонасосной установкой малодебитных нефтяных скважин | 1984 |
|
SU1229426A1 |
| Скважинная штанговая насосная установка | 2020 |
|
RU2727833C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2721068C1 |
| СПОСОБ МОДУЛЯЦИИ ШУМА В ЗАТРУБНОМ ПРОСТРАНСТВЕ ЭКСПЛУАТАЦИОННОЙ СКВАЖИНЫ ПРИ ПЕРИОДИЧЕСКОЙ ОТКАЧКЕ ЖИДКОСТИ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ ПО НАСОСНО-КОМПРЕССОРНЫМ ТРУБАМ | 1992 |
|
RU2068495C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2715120C1 |
| Скважинная штанговая насосная установка | 2019 |
|
RU2721067C1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 2016 |
|
RU2613477C1 |
Изобретение относится к нефтедобывающей промышленности и может быть использовано при управлении работой нефтяных скважин, оборудованных штанговыми глубинно-насосными установками. Техническим результатом изобретения является повышение производительности и надежности работы глубинно-насосной установки нефтяной скважины в целом за счет непрерывного контроля и поддержания заданного значения динамического уровня жидкости в стволе скважины. Способ включает контроль изменений усилий в точке подвеса насосных штанг, измерение положения полированного штока, определение его крайних верхних и нижних положений, задание уставки динамического уровня жидкости в стволе скважины выше уровня приема насоса и периодические отключения установки для накопления жидкости. Значения усилий фиксируют в моменты прохождения крайних точек до и после смены знака направления движения штока. По зафиксированным значениям усилий рассчитывают средние значения усилий в крайней верхней и крайней нижней мертвых точках. Затем определяют уровень жидкости по приведенной формуле, сравнивают его с величиной уставки и по полученному отклонению на заданном времени цикла корректируют продолжительность паузы для накопления жидкости в стволе скважины. 1 ил.
Способ управления глубинно-насосной установкой нефтяной скважины, включающий контроль изменений усилий в точке подвеса колонны насосных штанг, измерение положения полированного штока, определение его крайних верхних и нижних положений, задание уставки динамического уровня жидкости в стволе скважины выше уровня приема насоса и периодические отключения установки для накопления жидкости в скважине, отличающийся тем, что дополнительно задают время цикла периодической откачки жидкости из ствола скважины и фиксируют при прохождении крайних верхних и крайних нижних положений хода полированного штока значения усилий в точке подвеса колонны насосных штанг перед сменой и сразу после смены направления движения полированного штока, по зафиксированным усилиям находят средние значения усилий в крайнем верхнем и крайнем нижнем положениях штока, после чего определяют динамический уровень жидкости в стволе скважины по формуле
где Hd - динамический уровень жидкости в стволе скважины;
Рср.в - среднее значение усилия в крайнем верхнем положении штока;
Рср.н - среднее значение усилия в крайнем нижнем положении штока;
Fпл - площадь поперечного сечения плунжера насоса;
ρж - плотность жидкости в стволе скважины;
g - ускорение свободного падения;
Hk - поправочная константа установки, позволяющая учесть измерительную погрешность расчетного уровня, обусловленную влиянием динамических составляющих усилий в штоке,
затем сравнивают данное значение с величиной уставки и по полученному отклонению на заданном времени цикла корректируют продолжительность паузы для накопления жидкости в стволе скважины.
| СПОСОБ УПРАВЛЕНИЯ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 1996 |
|
RU2118443C1 |

