Изобретение относится к нефтедобывающей промышленности и может быть использовано при управлении работой нефтяных скважин, оборудованных штанговыми насосными установками.
Известен способ управления глубинно-насосной установкой нефтяных скважин, включающий контроль изменения усилий в точке подвеса колонны насосных штанг, задание уставки динамического уровня жидкости в стволе скважины выше уровня приема насоса, приложение дополнительных усилий и отключение установки на момент их приложения в случае снижения динамического уровня ниже заданного (СССР, а.с. 1121401, МКИ 5 E 21 В 43/00, 1984). Однако такой способ сложен в реализации и настройке при эксплуатации.
Более близким к данному изобретению является способ управления глубинно-насосной установкой, предусматривающий автоматический контроль положения полированного штока, измерение усилий в штоке в крайних (верхнем и нижнем) положениях хода штока в состоянии кратковременного останова двигателя на момент измерения и расчет текущего значения динамического уровня жидкости, ввод значения динамического уровня, используемого в качестве уставки (задания) для поддержания этого уровня за счет регулирования длительности останова двигателя (Патент РФ N 2118443, E 21 В 43/00, БИ N 24, 1998 г., "Способ управления глубинно-насосной установкой нефтяной скважины").
Недостатком данного способа является отсутствие автоматической проверки и корректировки задаваемого значения динамического уровня для обеспечения максимальной производительности установки как при первоначальном его вводе, так и впоследствии при изменении внешних условий работы (изменения давления пласта, обводненности, качества сепарации и содержания газа в жидкости). Кроме того, останов и удержание штока в точках замера также сложны в реализации и снижают показатели надежности установки.
Задача, на решение которой направлено изобретение, заключается в повышении производительности штанговой глубинно-насосной установки и сокращении эксплуатационных расходов за счет повышения показателей надежности установки.
Технический результат, получаемый от реализации способа по изобретению, состоит в осуществлении постоянной работы скважины с динамическим уровнем, обеспечивающим максимальную ее производительность, улучшении показателей надежности установки за счет исключения останова и удержания штанг в крайних точках движения штока при измерении усилий и улучшении условий технического обслуживания установки благодаря формированию информации, используемой в ходе такого обслуживания.
Технический результат достигается за счет того, что в способ управления штанговой глубинно-насосной установкой нефтяной скважины, включающий задание динамического уровня жидкости в стволе скважины выше уровня насоса, контроль изменения усилий и положения полированного штока, определение динамического уровня с использованием прямой зависимости от разности значений усилий в крайнем верхнем и крайнем нижнем положениях хода штока и поддержание заданного уровня в рабочем режиме за счет периодического отключения установки с регулируемой длительностью, вводят режим предварительного обследования скважины, реализующий алгоритм вывода ее на уровень незаполнения насоса и последующего автоматического определения параметров, соответствующих максимальной производительности скважины с обеспечением сбалансированности установки, которые используются в рабочем режиме установки в качестве заданных; в рабочем режиме, реализуя алгоритм поддержания заданного значения регулируемого параметра, дополнительно к вышеуказанному изменению длительности паузы вводят изменение длительности цикла регулирования для обеспечения нахождения значения регулируемого параметра в заданной зоне регулирования, вводят оперативный контроль незаполнения насоса и при выявлении признака незаполнения при значении регулируемого параметра, равного заданному, производят корректировку задаваемого значения, причем в режиме обследования и в рабочем режиме измерение усилий в штоке производят при его непрерывном движении вверх и вниз (без останова на момент измерения), измеренные значения усилий обрабатывают для исключения высокочастотной составляющей.
Предусматривают также использование бесконтактных средств коммутации питающих цепей двигателя, а также его плавный пуск.
Динамический уровень рассчитывают по известной формуле
где Hд - динамический уровень жидкости в стволе скважины;
Pфв и Pфн - значения усилий, определенных при движении штока соответственно вверх и вниз и предварительно обработанных для исключения высокочастотной составляющей;
Fпл - площадь поперечного сечения плунжера насоса;
ρж - плотность жидкости;
g - ускорение свободного падения.
При этом принимают, что значения Pфв и Pфн всегда соответствуют заданным точкам (или заданным зонам), находящимся в конце хода штока вверх и вниз соответственно.
Изобретение основывается на использовании при управлении штанговой глубинно-насосной установкой следующих положений:
- максимальная производительность установки с минимальными энергозатратами возможна при работе скважины с динамическим уровнем, обеспечивающим максимальный приток жидкости в скважину, при работе насоса с полным его заполнением и обеспечением сбалансированности установки (станка-качалки);
- приток жидкости в скважине увеличивается с понижением динамического уровня жидкости в стволе скважины;
- при выборе насоса установки для скважины, предусматривают запас подачи насоса, необходимый для компенсации утечек в насосе и трубах установки, увеличивающихся с увеличением времени эксплуатации насоса;
- при работе установки в установившемся режиме при неизменных условиях (постоянное число качаний, постоянная длина хода штока, неизменные обводненность, пластовое давление, содержание газа) одному и тому же динамическому уровню соответствуют одни и те же (или с допустимыми для данного способа отклонениями) значения усилий в штоке, предварительно обработанные с целью исключения высокочастотной составляющей и отнесенные к одним и тем же положениям хода штока. С изменением динамического уровня изменяется и усилие в штоке при подъеме столба жидкости (при ходе ползуна насоса вверх);
- изменение усилий, замеренных в точке подвески штанг при работе с незаполнением насоса, имеют характерные признаки в начале хода штока вниз;
- сбалансированность станка-качалки по одному из вариантов оценивается соотношением пиков мощности, потребляемой двигателем при ходе плунжера насоса вниз и вверх.
Необходимым условием реализации способа является наличие запаса подачи насоса для обеспечения возможности откачки скважины до уровня незаполнения насоса.
Способ предполагает использование двух режимов:
- режима обследования скважины и автоматического определения значения параметров, обеспечивающих максимальную производительность скважины, которые принимают в качестве заданных для рабочего режима;
- рабочего режима, обеспечивающего работу установки с заданными параметрами.
В режиме обследования имеется два периода. В первом периоде реализуют алгоритм управления установкой, обеспечивающий непрерывную работу по откачке жидкости из скважины и соответствующее снижение динамического уровня жидкости в скважине до уровня появления признака незаполнения насоса. В течение периода откачки через равное количество циклов качаний определяют значения усилий на штоке Pфв и Pфн и ведут массив замеров, а также отдельно запоминают значения этих же параметров за последний цикл качаний, если в нем не был выявлен признак незаполнения насоса. Массив последовательности замеров используют для анализа характера изменений значений Pфв в функции времени, что при непрерывной откачке жидкости из скважины насосом, имеющим запас подачи, соответствует и функции снижающегося динамического уровня. Анализ проводят на монотонность функциональной зависимости, на наличие экстремальных и предельного значений Pфв (последнее при отсутствии признака незаполнения насоса говорит о том, что подачи насоса недостаточно для выхода на уровень незаполнения насоса). Факт незаполнения устанавливают, если признак незаполнения был выявлен в каждом из нескольких последовательных циклов качаний. При этом сохраненные значения Pфв и Pфн последнего цикла качаний без признака незаполнения насоса принимают как соответствующие максимальному притоку жидкости в скважину при обеспечении условия работы с полным заполнением насоса и обозначают Pфвм и Pфнм а рассчитанное с использованием этих параметров значение динамического уровня обозначают Hдм. Первый период заканчивается по факту выявления признака незаполнения насоса или по факту невозможности выхода на него.
Во втором периоде при наличии выхода на динамический уровень незаполнения насоса на основании данных анализа изменения Pфв уточняют регулируемый параметр (Pфв или Hд) и выбирают алгоритм регулирования. С учетом выбранного параметра и типа алгоритма регулирования, а также значения Pфвм или Hдм, определяют значение, которое далее используют в качестве заданного (Pзд или Hзд), и определяют допустимую величину зоны регулирования Δ Pфв или Δ Hд, в пределах которой должны находиться значения регулируемого параметра в цикле регулирования, т. е. в конце паузы и в конце периода работы цикла регулирования. При определении указанных величин учитывают и предварительно введенные ограничения, например, заданные максимальное и минимальное значения Δ Pфв или величина, на которую должно быть уменьшено значение Hдм при определении значения Hзд. Далее во втором периоде с помощью выбранного алгоритма регулирования обеспечивают выход на такой уровень в скважине, для которого рассчитываемое в ходе регулирования текущее значение параметра будет соответствовать заданному. При этом в качестве регулирующего воздействия в дополнение к указанной выше длительности отключения (Tрп) используют и длительность цикла регулирования (Tрпр). Изменение Tрпр используют для обеспечения нахождения регулируемого параметра в пределах зоны регулирования и минимизации количества остановов двигателя в ходе регулирования. В течение определенного времени проверяют устойчивость работы с заданным параметром и отсутствие выхода на незаполнение насоса. Полученный таким образом фактический уровень жидкости в скважине является уровнем максимального притока жидкости, на котором возможна устойчивая работа установки с полным заполнением насоса. Проверку сбалансированности для установленного уровня осуществляют по названному выше варианту. При выявлении отклонения вычисляют требуемый вес контргруза, который обеспечит сбалансированность установки при работе с заданным значением регулируемого параметра. Определенное значение веса выводят в качестве справочного на пульт для использования обслуживающим персоналом при выполнении работ по обеспечению сбалансированности установки.
Таким образом, в изобретении используют в качестве задаваемого значение параметра, определенное на основании усилий, измеренных с учетом всех составляющих усилий в штоке (статических, динамических и сил трения), которые будут входить также в значение усилий, замеряемых и в рабочем режиме, поэтому разница между заданным и текущим значениями регулируемого параметра будет зависеть в основном от изменения динамического уровня жидкости в скважине.
Выполнение этого условия, а также использование значений усилий в штоке, замеренных в конце хода штока и обработанных с целью исключения влияния высокочастотной составляющей, и обеспечило возможность работы установки без останова для проведения замера усилий.
Полученные значения упомянутых выше параметров (Hзд, Pзд, Tрп, Tрр, Tрпр, Δ Pфв, Δ Hзд), а также тип регулятора используют далее в рабочем режиме.
В рабочем режиме в течение каждого цикла качания по выбранному типу регулирования осуществляют поддержание заданного значения параметра (Pзд или Hзд). Одновременно проверяют, находятся ли значения регулируемого параметра после окончания паузы и в конце периода работы цикла регулирования в пределах заданной зоны регулирования. Если значения выходят за пределы зоны, изменяют общую длительность цикла регулирования с сохранением соотношения длительностей паузы и работы в цикле регулирования. В рабочем режиме обеспечивают также в каждом цикле качания контроль незаполнения насоса для выявления случаев, когда из-за изменения внешних условий этот признак начнет формироваться на динамическом уровне, соответствующем поддерживаемому значению. По факту выявления признака незаполнения запускают на реализацию алгоритм второго периода режима обследования скважины для корректировки задаваемого значения регулируемого параметра.
Реализацию управления по данному изобретению рекомендуется выполнять на базе универсального промышленного контроллера.
При анализе технической и патентной литературы заявленная совокупность признаков не выявлена, что позволяет сделать вывод о соответствии заявленного технического решения критериям "новизна" и "изобретательский уровень".
Схема (см. чертеж) представляет собой алгоритм функционирования управляющего контроллера, который содержит блок 1 ввода информации с датчиков, блок 2 информационной взаимосвязи с пультом, блок 3 вывода управляющих воздействий на привод двигателя, блоки 5, 6 и 7, реализующие алгоритмы режимов обследования и рабочего, блока 4, формирующего справочную информацию, блока 8, обеспечивающего хранение информации, как вводимой с датчиков и пульта, так и формируемой блоками в процессе их функционирования, блока 9, реализующего диспетчирование работы блоков 1...7, таймера 10. Сплошной линией выделены связи по управлению, штриховой - информационные связи.
Способ реализуют следующим образом.
При пуске установки первым запускают блок 9, который далее работает постоянно, проверяя в цикле, с заданной частотой, наличие условий запуска блоков 1. ..7. Для организации временных уставок в работе алгоритмов блок 9 использует сигналы таймера 10, поступающие с постоянной частотой. Работа по реализации алгоритмов режима обследования скважины и автоматического определения значения параметров начинается после ввода через блок 2 и записи в блок 8 задания на данный режим. На основании этой информации блок 9 запускает в работу блок 5, который формирует команду на пуск двигателя для непрерывной откачки жидкости из скважины, записывает в блок 8 данные, определяющие условия и частоту запуска блока 1, обеспечивающего ввод информации с датчиков положения (S), усилия (P), тока (I), напряжения (U) и запоминание ее в блоке 8. На основании анализа информации с датчиков в блоке 5 определяют и сохраняют в блоке 8 координаты верхней и нижней крайних точек движения штока, длительность цикла качания и количество замеров, выполняемых блоком 1 в одном цикле качания, сглаженные с помощью фильтра значение Pфв и Pфн и значение уровня Hд, рассчитанное с их использованием по приведенной формуле. Их запись в блок 8 происходит с частотой и по алгоритму, минимизирующим объем требуемой памяти. Одновременно вычисляют и анализируют изменение значений Pфв и Hд по величине и знаку. Если выявляется смена знака изменения величины, то в блок 8 записывают координату положения штока выявленного экстремального значения и тип параметра. Также сохраняют в блоке 8 значения параметров Pфв и Pфн за каждый последний цикл качаний, в котором не был выявлен признак незаполнения насоса. Контролируют появление признаков незаполнения насоса и разбалансировки установки. При выявлении признака незаполнения насоса блок 5 записывает в блок 8 соответствующую информацию и прекращает работу. Если же в результате некоторой последовательности замеров не выявлено изменение Pфв, то регистрируют факт невозможности выхода на уровень незаполнения насоса, на пульт выводят соответствующую информацию, продолжают непрерывную работу установки и ожидают ввода информации с пульта.
Блок 9 по факту появления признака незаполнения насоса запускает блок 6, в котором анализируют данные, накопленные в блоке 8 за время работы алгоритма первого периода режима. Если выявляется, что имеет место непрерывное, без смены знака, изменение Pфв и Hд, то выбирают для использования алгоритм ПИ-регулятора и, при необходимости выбора типа параметра, предпочтение отдается Pфв. Если изменение обоих параметров имеет более сложный характер, т.е. выявлены экстремальные значения, то используют регулирование по релейному типу или осуществляют переход на значение регулируемого параметра, находящегося в области монотонного изменения определенной ранее функциональной зависимости.
Задаваемое значение регулируемого параметра Pзд или Hзд определяют с использованием значений Pфвм или Hдм. При наличии введенных ограничений на задаваемые параметры расчет выполняют с учетом этих ограничений.
Далее во втором периоде режима обследования с использованием выбранного алгоритма регулирования обеспечивают выход на заданный уровень и проверку для него состояния сбалансированности установки и при выявлении разбалансировки рассчитывают величину контргруза, необходимую для восстановления сбалансированности, полученное значение выводят через блок 2 на пульт. Обслуживающий персонал на основании этой информации принимает решение, либо об изменении контргруза, либо о разрешении работы с разбалансировкой. Информация о принятом решении вводится через блок 2. Полученные значения Pзд или Hзд и значения регулирующих параметров записывают в блок 8 как начальные для рабочего режима, и блок 6 прекращает свою работу. Далее блок 9 запускает блок 7, который обеспечивает поддержание Pзд или Hзд по выбранному алгоритму регулирования и контроль заполнение насоса. При выявлении признака незаполнения насоса на поддерживаемом заданном значении регулируемого параметра, что может произойти при изменении внешних условий, блок 9 включает в работу блок 6 для нового определения Pзд или Hзд и новых начальных значений регулирующих параметров Tрп, Tрр, Tрпр, после чего вновь запускают блок 7. Таким образом алгоритмом обеспечивается постоянное обслуживание работы установки с оптимальным динамическим уровнем. В блоке 7 проверяют также, находится ли текущее значение регулируемого параметра, замеренное сразу после окончания паузы и в конце периода работы цикла регулирования, в пределах значений заданной зоны регулирования, хранимых в блоке 8. Если значения выходят за пределы зоны, изменяют общую длительность цикла регулирования с сохранением соотношения длительности паузы и работы в цикле.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ШТАНГОВОЙ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 2003 |
|
RU2242588C1 |
| Способ эксплуатации скважины, оборудованной скважинной штанговой насосной установкой, в условиях, осложненных снижением динамического уровня | 2022 |
|
RU2790157C1 |
| СПОСОБ УПРАВЛЕНИЯ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 1996 |
|
RU2118443C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ СКВАЖИННОГО ГЛУБИННОНАСОСНОГО ОБОРУДОВАНИЯ | 1999 |
|
RU2168653C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИН | 1997 |
|
RU2142554C1 |
| СПОСОБ ОПТИМИЗАЦИИ ПРОЦЕССА ДОБЫЧИ НЕФТИ | 2013 |
|
RU2532488C1 |
| НАЖИМНОЕ УСТРОЙСТВО | 1998 |
|
RU2167755C2 |
| УПЛОТНЕНИЕ | 1996 |
|
RU2124662C1 |
| ШТАНГОВРАЩАТЕЛЬ КОЛОННЫ НАСОСНЫХ ШТАНГ ГЛУБИННО-НАСОСНОЙ УСТАНОВКИ | 1999 |
|
RU2160817C2 |
| СПОСОБ УПРАВЛЕНИЯ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 2003 |
|
RU2242587C1 |
Изобретение относится к нефтедобывающей промышленности и предназначено для управления работой нефтяных скважин. Задачей изобретения является повышение производительности глубинно-насосной установки и сокращение эксплуатационных расходов за счет повышения показателей надежности установки. Для этого в способе предварительно обследуют скважину, реализуя алгоритм вывода ее на динамический уровень с признаком незаполнения насоса и автоматически определяют параметры, соответствующие максимальной производительности скважины с обеспечением сбалансированности установки. Полученные данные используют в рабочем режиме в качестве заданных. В рабочем режиме, реализуя алгоритм поддержания заданного значения регулируемого параметра, дополнительно к известному изменению длительности паузы, изменяют длительность цикла регулирования для обеспечения нахождения значения регулируемого параметра в заданной зоне регулирования. Затем осуществляют оперативный контроль незаполнения насоса и при выявлении признака незаполнения при значении регулируемого параметра, равного заданному, производят корректировку задаваемого значения. Причем в режиме обследования и в рабочем режиме измерение усилий в штоке производят при его непрерывном движении вверх и вниз. Значения измерений обрабатывают для исключения высокочастотной составляющей. 1 ил.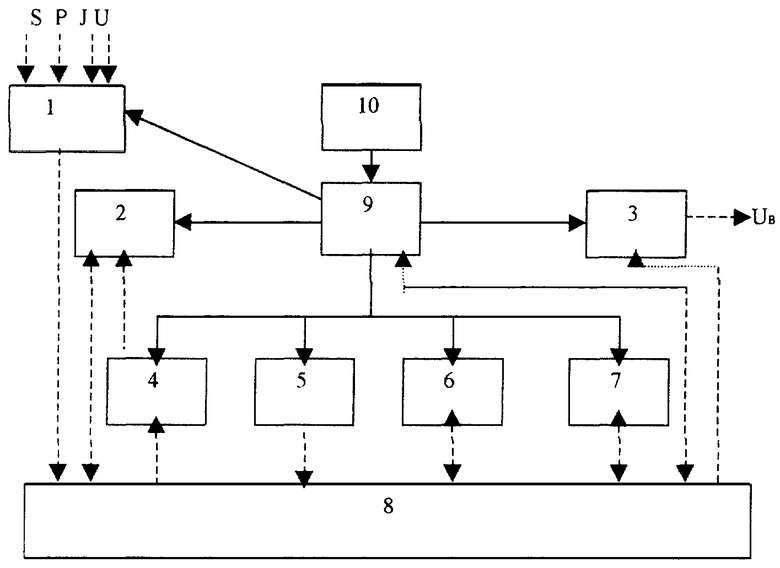
Способ управления штанговой глубинно-насосной установкой нефтяной скважины, включающий задание динамического уровня жидкости в стволе скважины выше уровня насоса, контроль изменения усилий и положения полированного штока, определение динамического уровня с использованием прямой зависимости от разности значений усилий в верхнем и нижнем положениях хода штока и поддержание заданного уровня в рабочем режиме за счет периодического отключения установки с регулируемой длительностью, отличающийся тем, что вводят режим предварительного обследования скважины, заключающийся в реализации алгоритма вывода ее на динамический уровень с признаком незаполнения насоса и последующего автоматического определения параметров, соответствующих максимальной производительности скважины с обеспечением сбалансированности установки, которые используют в рабочем режиме установки в качестве заданных, кроме этого, в рабочем режиме, реализуя алгоритм поддержания заданного значения регулируемого параметра, дополнительно к выше указанному изменению длительности паузы, вводят изменение длительности цикла регулирования для обеспечения нахождения значения регулируемого параметра в заданной зоне регулирования, а также вводят оперативный контроль незаполнения насоса и при выявлении признака незаполнения при значении регулируемого параметра, равного заданному, производят корректировку задаваемого значения, причем в режиме предварительного обследования и в рабочем режиме измерение усилий в штоке производят при его непрерывном движении вверх и вниз, после чего измеренные значения усилий обрабатывают для исключения высокочастотной составляющей.
| СПОСОБ УПРАВЛЕНИЯ ГЛУБИННО-НАСОСНОЙ УСТАНОВКОЙ НЕФТЯНОЙ СКВАЖИНЫ | 1996 |
|
RU2118443C1 |
| Способ управления глубинно-насосной установкой нефтяных скважин | 1982 |
|
SU1121401A1 |
| Устройство для автоматического управления глубинно-насосной установкой малодебитных нефтяных скважин | 1984 |
|
SU1224443A2 |
| Способ управления глубинно-насосной установкой нефтяных скважин | 1986 |
|
SU1448083A1 |
| Устройство для автоматического управления глубиннонасосной установкой малодебитных нефтяных скважин | 1984 |
|
SU1229426A1 |
| Устройство для автоматического управления глубинно-насосной установки и малодебитных нефтяных скважин | 1986 |
|
SU1384826A2 |
| Устройство для определения заполнения скважинного штангового насоса | 1987 |
|
SU1507957A1 |
| US 4541271 А, 17.09.1985 | |||
| US 4934458 А, 19.06.1990 | |||
| US 3838597 А, 01.10.1974 | |||
| DE 3140840 А1, 27.05.1982. | |||
