Изобретение относится к неразрушающему контролю изделий магнитным методом и может быть использовано при выявлении дефектов на крупногабаритных протяженных объектах, например трубопроводах электростанций или нефтегазового трубопроводного транспорта.
Известен способ магнитного контроля (П.А. Халилеев, Феррозондовые датчики импедансного типа. ж. Дефектоскопия, 1976, N 1, с. 70 - 71), который заключается в том, что феррозондовый датчик перемещают по контролируемому объекту. При этом датчиком регистрируется тангенциальная составляющая поля, по амплитудному значению сигнала этой составляющей и среднему значению фона определяют приращение поля и наличие дефекта.
Недостатком этого способа является недостаточно высокая чувствительность. При повышении чувствительности системы датчика возрастают фоновые сигналы, что не позволяет выделить сигнал от мелких дефектов.
Известен способ магнитного контроля магистральных трубопроводов (юбилейный сб. МНПО "Спектр", 1994, Г.А. Жукова, Л.А. Хватов, Развитие метода и средств магнитной диагностики магистральных газопроводов), который заключается в установке датчиков по окружности с внутренней поверхности трубы. Каждым датчиком регистрируется изменение составляющей поля в области дефекта. Недостатком этого способа является невысокая чувствительность - выявляются дефекты глубиной 0,1Т (Т - толщина трубы) и более, протяженностью 3Т и более.
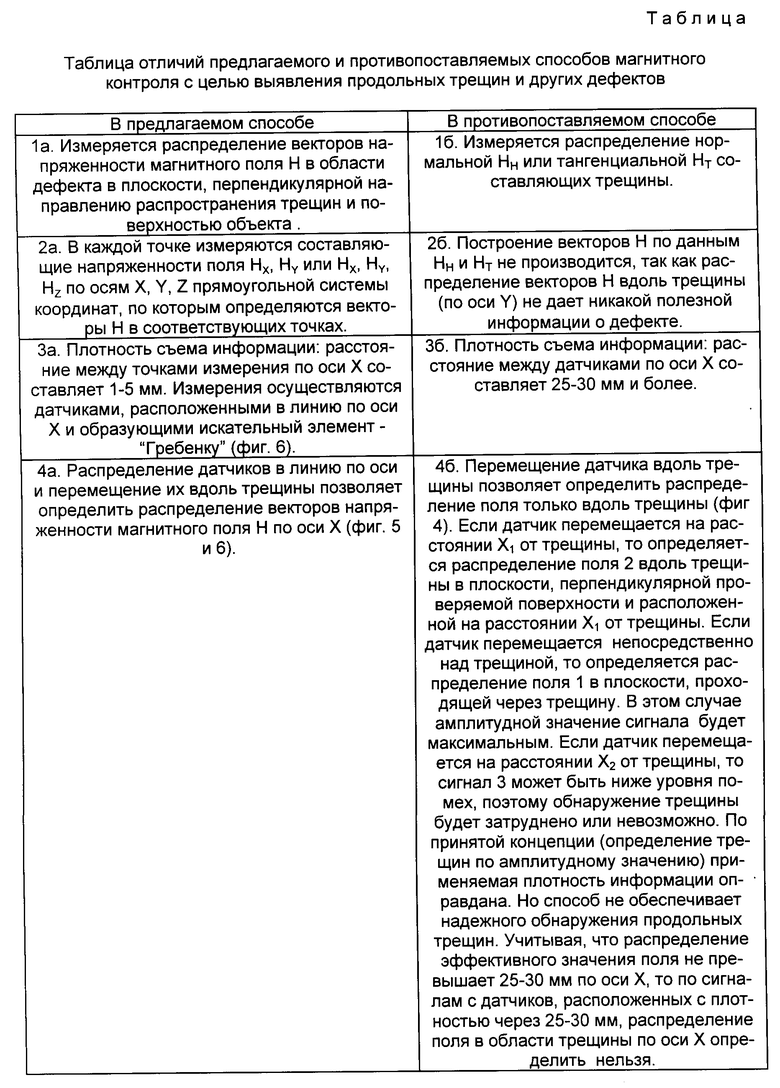
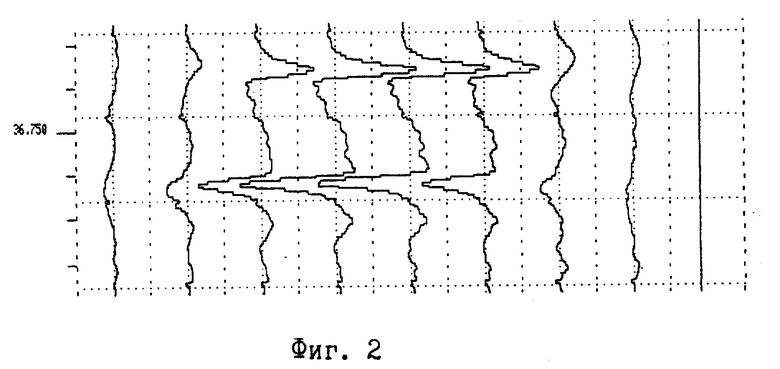
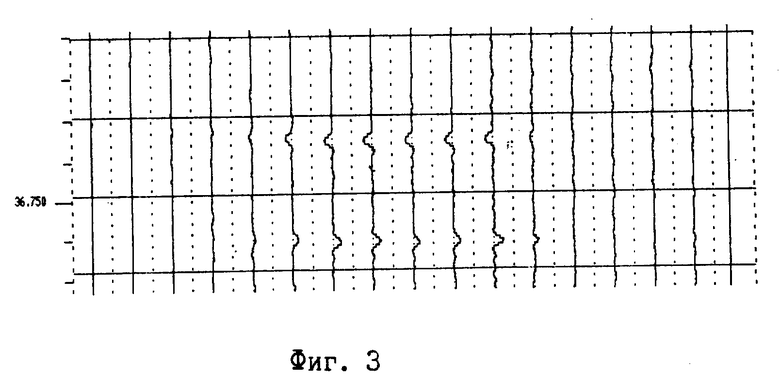
Наиболее близким по технической сущности к предлагаемому является способ контроля магистральных трубопроводов (проспект фирмы H.Rosen Engineering. Advanced Pipeline Inspection Systems, 1994), который заключается в том, что датчиком при его движении над контролируемой поверхностью регистрируется аналоговый сигнал нормальной составляющей напряженности поля (фиг. 1). Аналогичное измерение осуществляется датчиком тангенциальной составляющей (фиг. 2). Полученные сигналы обрабатываются. В результате, например, кривая сигнала нормальной составляющей напряженности поля приобретает вид, показанный на фиг. 3. Полученные сигналы по форме и амплитуде сравниваются с сигналами, записанными в библиотеку ЭВМ. По результатам сравнения определяют наличие дефекта.
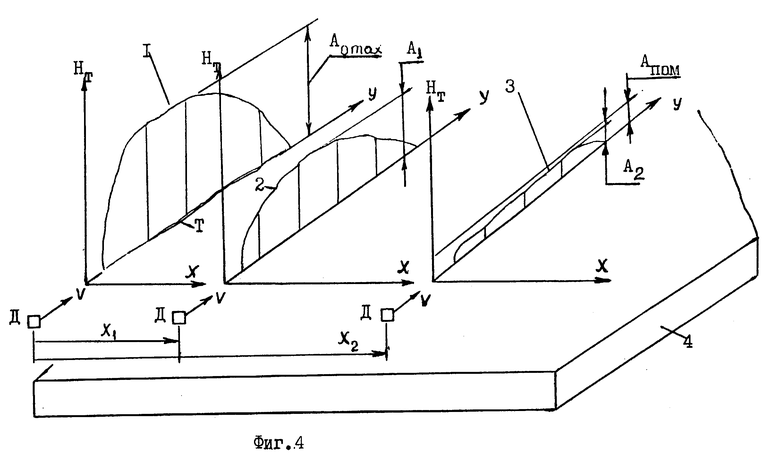
Амплитуда сигнала зависит от многих факторов, в том числе от расстояния между трещиной и перемещающимся параллельно ей датчиком D (см. фиг. 4). Если датчик перемещается на расстоянии X1 от трещины, то распределение нормальной или тангенциальной составляющих напряженности поля вдоль трещины изображается кривой 2 (сигнал имеет амплитуду A1).
Если датчик D перемещается непосредственно над трещиной, то распределение поля изображается кривой 1 (сигнал имеет амплитуду A = A0max).
Если датчик перемещается на расстоянии X2 от трещины, то амплитуда сигнала A2 будет ниже уровня помех. В этом случае обнаружение сигнала от дефекта будет затруднительным или невозможным.
Полученные сигналы с датчиков после их обработки сравниваются по форме и амплитуде с сигналами, занесенными в память ЭВМ. Эти сигналы определяются в условиях эксплуатации на основании большого количества статистических данных. Чувствительность этого способа и основанной на нем системы такова: обнаруживаются коррозионные пятна диаметром 30 мм и более при диаметре проверяемой трубы 48 (1,21 м) (см. табл.).
Недостатки этого способа заключаются в малой чувствительности к мелким дефектам, особенно продольным трещинам; необходимо иметь в памяти ЭВМ большое число различных форм сигналов нормальной и/или тангенциальной составляющих поля. Часто может встретиться дефект, сигнала которого нет в библиотеке ЭВМ. Значения аналоговых сигналов распределения поля вдоль трещины (вдоль оси Y, см. фиг. 2) содержат недостаточно данных для безошибочного определения незначительных по размерам продольных трещин и других дефектов. Один параметр-амплитуда не может охарактеризовать несколько параметров трещин (ширину, глубину и др. ). А если сигнал лежит ниже уровня помех Aпом ≥ A2 (см. фиг. 2), то его выделение представляется затруднительным или невозможным.
Кроме этого, в этом способе не учитывается поле фона, образованное полем намагничивающего устройства и полем, создаваемым ферромагнитным материалом проверяемого изделия. По этой причине указанный способ (прототип) также является неэффективным.
Предлагается способ магнитного способа, который не имеет указанных недостатков.
Целью предлагаемого магнитного способа контроля является повышение чувствительности и надежности обнаружения продольных трещин и других дефектов в магистральных трубопроводах и других протяженных объектах.
Предлагаемый способ магнитного контроля принципиально отличается от известных способов магнитного контроля концепцией измерения и комплексом критериев наличия трещин. В его основу положено не амплитудное измерение сигналов, а комплекс параметров, вытекающих из распределения векторов поля над дефектом и достаточно полно количественно характеризующих дефект.
На прилагаемых чертежах обозначено (фиг. 1 - 11):
Фиг. 1 - Вид сигнала нормальной составляющей напряженности поля, получаемого в ближайшем аналоге предлагаемого способа.
Фиг. 2 - Вид сигнала тангенциальной составляющей напряженности поля, получаемого в ближайшем аналоге предлагаемого способа.
Фиг. 3 - Вид сигнала нормальной составляющей напряженности поля после обработки.
Фиг. 4 - Схема распределения напряженности поля над трещиной: тангенциальной Hт (составляющей поля над трещиной T; D - датчик, перемещающийся вдоль трещины; 1 - кривая напряженности поля Hт, при перемещении датчика непосредственно над трещиной T; 2 - кривая напряженности поля Hт - сигнал, снимаемый с датчика при его движении на расстоянии X1 от трещины; 3 - кривая напряженности поля Hт - сигнал датчика при его движении на расстоянии X2 от трещины T; A = A0max, A1, A2 - амплитуды сигналов; Aпом - максимальное значение амплитуды помех; 4 - проверяемое изделие; V - направление скорости перемещения датчика D; Hт, X, Y - оси прямоугольной системы координат. Ось Hт перпендикулярна проверяемой поверхности; Ось X параллельна проверяемой поверхности и перпендикулярна вектору скорости V перемещения датчика.
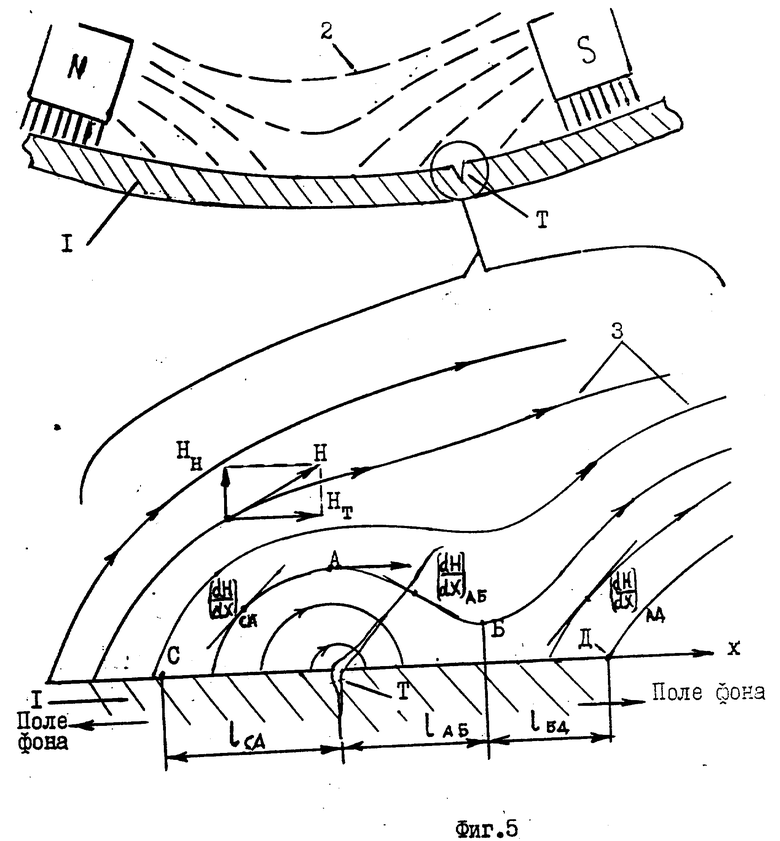
Фиг. 5 - Картина поля в области трещины в приложенном поле, построенная по результатам измерения векторов напряженности поля H (составляющих поля: нормальной Hн, тангенциальной Hт) (см. Г.С. Шелихов, Магнитопорошковая дефектоскопия деталей и узлов. - М.: ГП НТЦ "Эксперт", 1995, с. 8, 13). H - вектор напряженности поля. dH/dX - производные вектора H. [dH/dX]СА, [dH/dX] АБ, [dH/dX]БД - производные вектора H на участках lСА, lАБ, lБД. I - проверяемое изделие, T - трещина, N, S - полюсы намагничивающего устройства; A, Б - точки, в которых Hн = 0. lСА, lАБ, lБД, - расстояния по оси X. 2 - магнитные силовые линии поля фона; 3 - магнитные силовые линии в области дефекта.
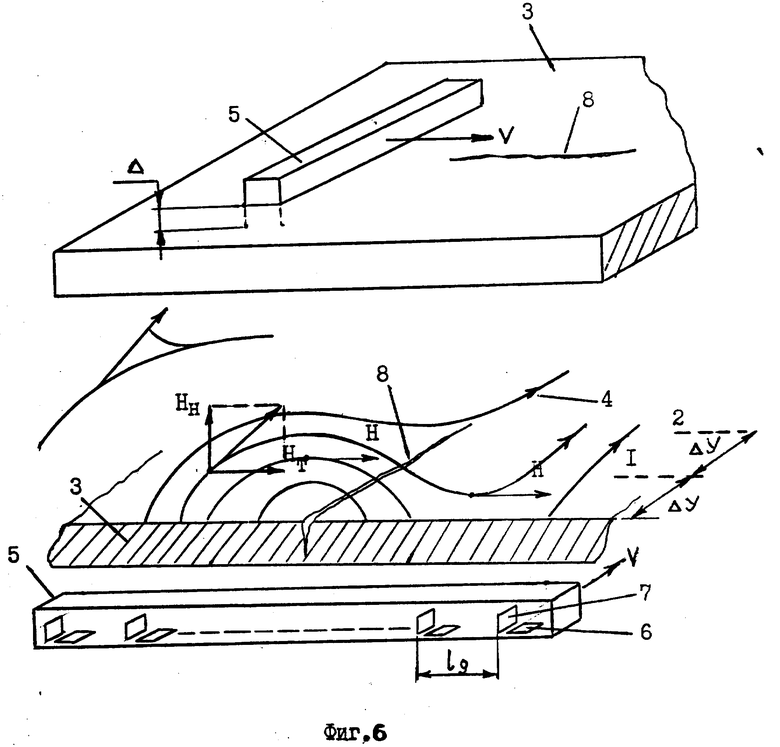
Фиг. 6 - Схема перемещения искательного элемента ("гребенки") над проверяемой поверхностью изделия и съема информации датчиками поля. 1, 2 - последовательные положения искательного элемента ("гребенки") при движении его в направлении вектора скорости V; 3 - проверяемое изделие; H - векторы поля, определенные по сигналам с датчиков; Hн, Hт - нормальная и тангенциальная составляющие напряженности поля; 4 - магнитные силовые линии; 5 - искательный элемент "гребенка"; 6 - датчики, измеряющие Hн; 7 - датчики, измеряющие Hт; 8 - трещина; lд - расстояние между соседними датчиками; V - вектор скорости движения искательного элемента.
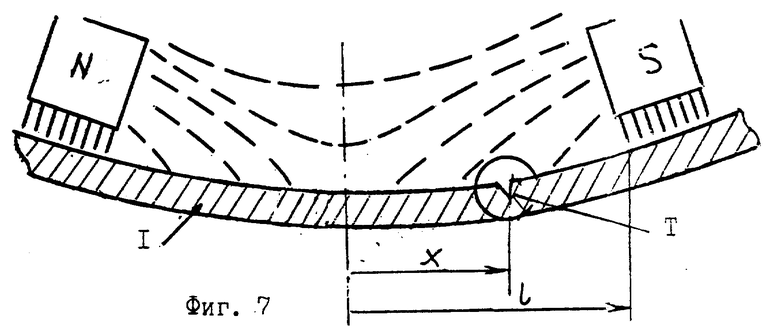
Фиг. 7 - схема намагничивания изделия.
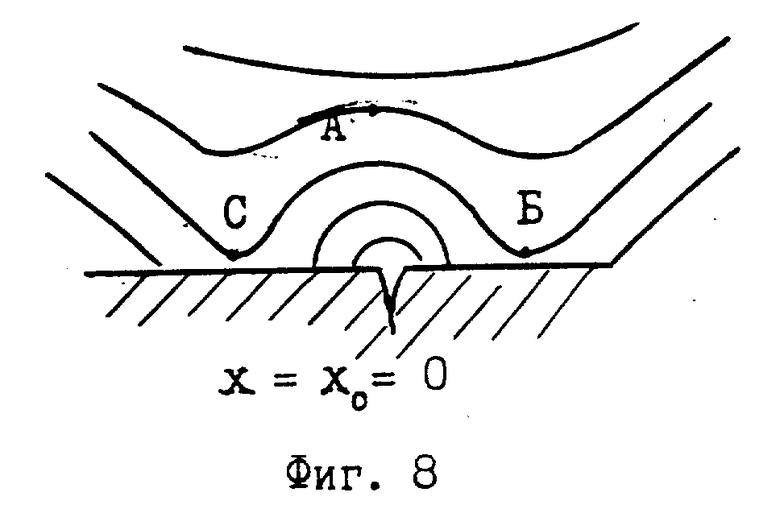
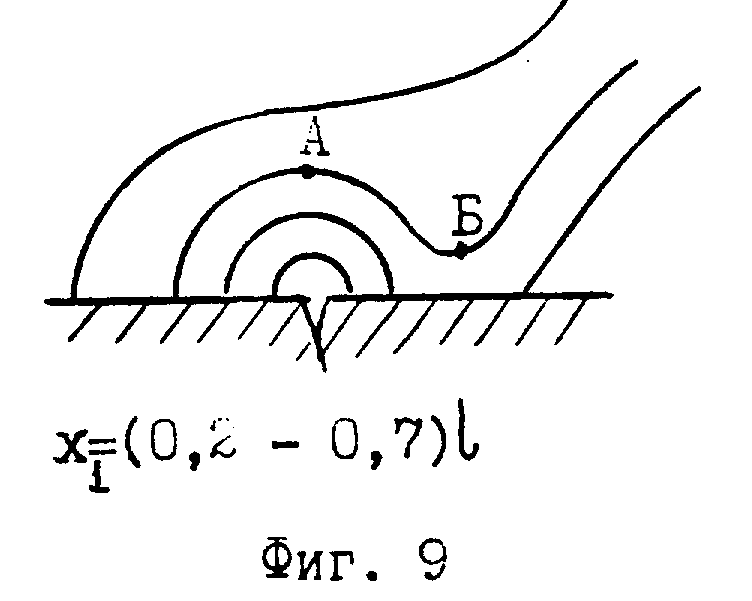
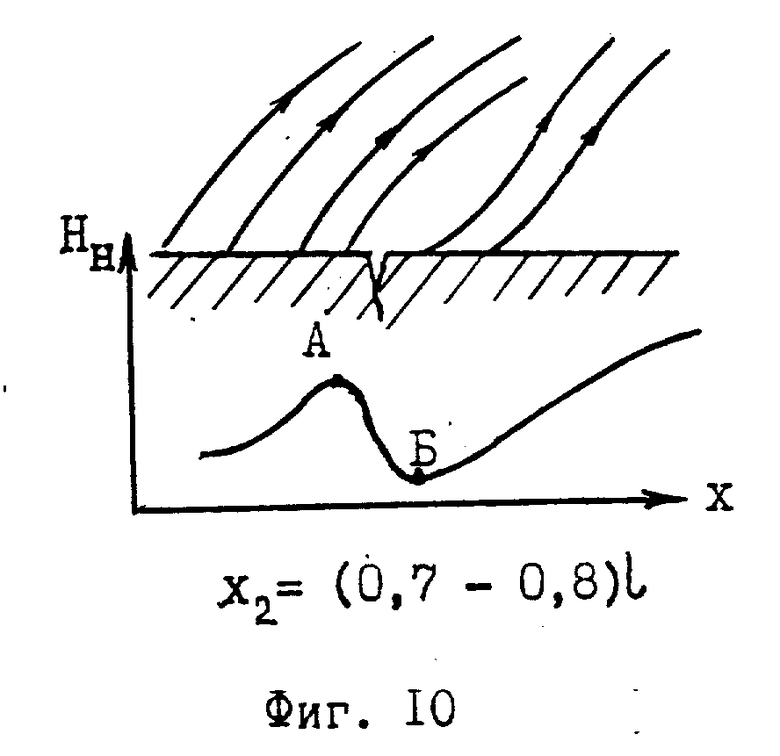
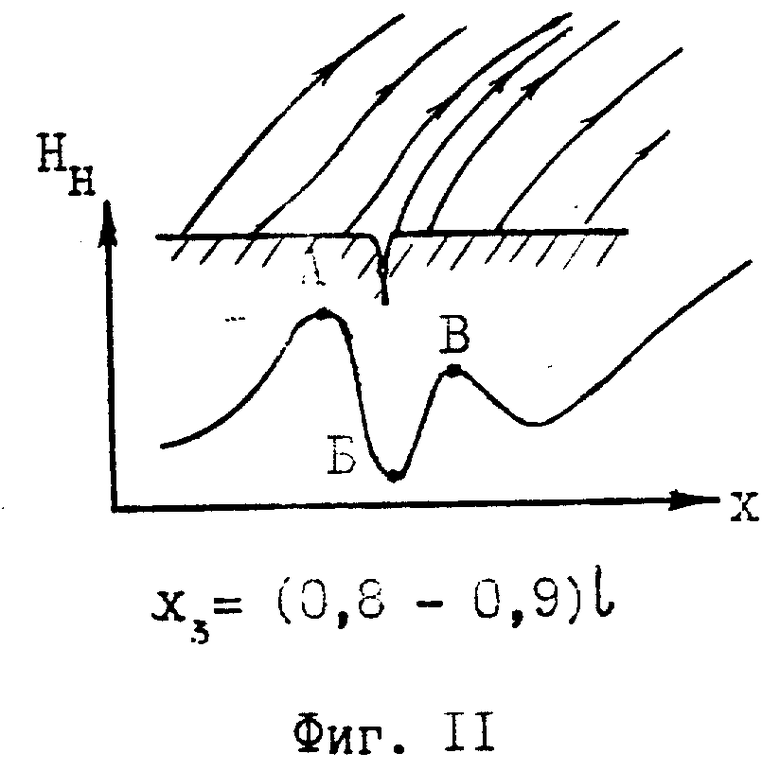
Фиг. 8 - 11 - Типовые картины полей в области трещины с учетом поля фона с различными значениями координаты X относительно полюсов намагничивающего устройства. I - проверяемое изделие; T - трещина, N, S - полюсы намагничивающего устройства; l - расстояние между магнитной нейтралью и полюсом намагничивающего устройства.
Сущность предлагаемого способа состоит в следующем.
При продольном намагничивании изделий или локальных участков протяженных изделий над трещиной возникает магнитное поле, которое является результатом суперпозиции поля рассеяния, вызванного нарушением сплошности металла и внешнего намагничивающего поля, являющиеся также результатом суперпозиции поля намагничивающего устройства и размагничивающего поля дефекта. Типичное поле над трещиной, расположенной между одним из полюсов намагничивающего устройства и магнитной нейтралью, показано на фиг. 5 (см. также Г.С. Шелихов, Магнитопорошковая дефектоскопия деталей и узлов. - М.: НТЦ "Эксперт", 1995, с. 99 - 103). Поле в области дефекта (трещины) в этом случае имеет характерные признаки:
1. Наличие точек А и Б, в которых нормальная составляющая напряженности поля Hн = 0 (dH/dX = 0);
2. Производная dH/dX меняет знак 3 раза:
на участке lСА она положительна;
на участке lАБ - отрицательна;
на участке lБД - положительна.
3. На участках lСА, lАБ, lБД имеются точки, в которых производные dH/dX максимальны.
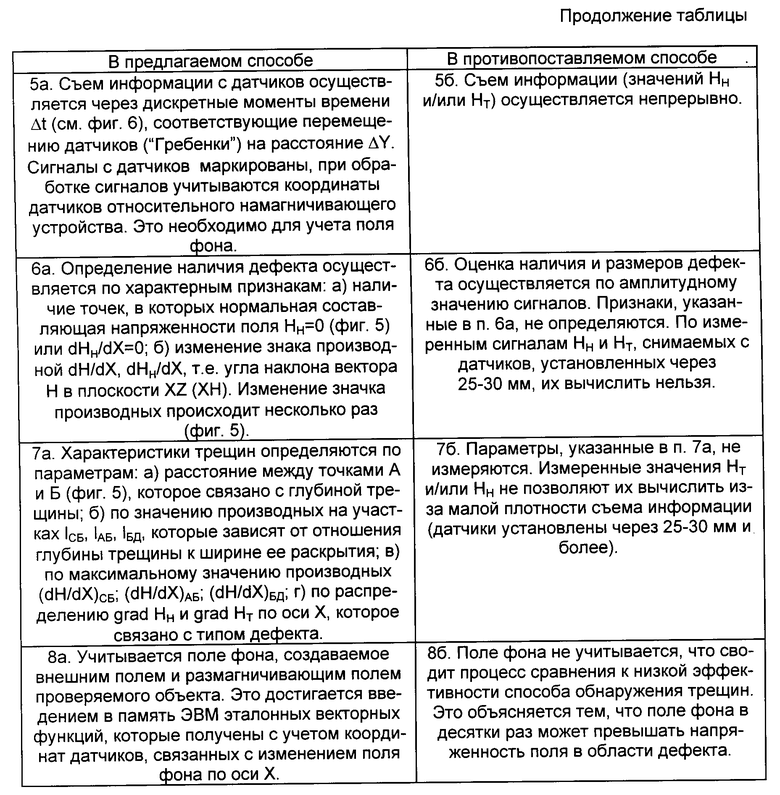
Отсюда следует, что признаками наличия трещины является наличие перечисленных выше признаков. Количественные их значения непосредственно связаны с параметрами трещины. Так, например, расстояние lАБ связано с глубиной трещины, максимальное значение производных - с отношением глубины трещины к ширине ее раскрытия. Длина трещины определяется по длительности сигнала с учетом скорости перемещения датчиков относительно проверяемой поверхности. Дополнительной характеристикой является изменение напряженности поля между соседними датчиками по оси X.
Зависимости между значениями этих параметров и размерами трещин устанавливаются экспериментально и вводятся в память ЭВМ в виде формул, по которым в процессе поиска дефектов автоматически вычисляются параметры трещин.
Предложенный способ реализуется по следующей схеме (фиг. 6). Датчики поля установлены в искательном элементе 5 по одной линии, образуя "гребенку". В каждой точке измерения установлено по 2 датчика: датчик 6 для измерения тангенциальной составляющей поля Hт и датчики 7 для измерения нормальной составляющей поля Hн. В экспериментальном образце пары датчиков установлены с интервалом lд ≤ 5 мм.
Измерительный элемент 5 перемещается над проверяемой поверхностью вдоль трещины со скоростью V (фиг. 6). В моменты времени t1, t2, t3, .... при положении искательного элемента на линиях 1, 2, ... снимаются сигналы с датчиков. За время Δt искательный элемент ("гребенка") перемещается на расстояние Δy = Δt•v. Сигналы маркированы, т.е. несут информацию о номерах и координатах датчиков, с которых они сняты.
По сигналам с датчиков вычисляются векторы напряженности поля H по линии установки датчиков. По данным вычисления векторов поля строится векторная функция распределения поля в виде совокупности указанных выше признаков, которая затем сравнивается с векторной функцией распределения, введенной ранее в память ЭВМ, соответствующей координатам датчиков, с которых сняты сигналы. Сравнение осуществляется с учетом наличия характерных выше указанных признаков. Затем по формульным зависимостям, введенных в память ЭВМ, и по измеренным значениям параметров вычисляются характеристики трещин (глубина, ширина и др.).
Векторная функция распределения идентичных трещин, имеющих различные координаты X относительно намагничивающего устройства, различны, так как существенно различно поле фона для точек с различными значениями координат X. Примеры типов векторных функций показаны на фиг. 8 - 11.
1. Поле над трещиной, расположенной на магнитной нейтрали, имеет 3 точки с нулевым значением Hн.
2. Поле над трещиной, смещенной с магнитной нейтрали на (0,2 - 0,5) l, подробно рассмотрено выше (см. фиг. 5).
3. Поле над трещиной, смещенной с магнитной нейтрали на (0,7 - 0,8) l (l - расстояние между магнитной нейтралью и полюсом намагничивающего устройства). Это поле характерно тем, что один край трещины полностью размагничен, Hт = 0, а нормальная составляющая поля имеет два экстремума в точках А и Б, где dHн/dX = 0.
4. Поле над трещиной, расположенной от магнитной нейтрали на расстоянии (0,8 - 0,9)l. Магнитные силовые линии проходят вдоль полости трещины (см. Г. С. Шелихов, Магнитопорошковая дефектоскопия деталей и узлов, ГП НТЦ "Эксперт", М. , 1995, с. 101 - 103) Над трещиной Hт = 0. Нормальная составляющая поля имеет 3 экстремума в точках А, Б, В.
При изменении координаты X от l = 0 до l = 1 расположения трещин, поле в области дефекта деформируется постепенно от вида 1, представленного на фиг. 8, до вида 4, представленного на фиг. 11.
По результатам сравнения с векторными функциями, находящимися в памяти ЭВМ, векторной функции, полученной в результате измерений, определяется наличие или отсутствие трещины или другого дефекта, а параметры трещин вычисляются по формульным зависимостям, введенным в память ЭВМ.
Для исключения влияния погрешности установки датчиков в "гребенке" или изменения положения "гребенки" при движении дефектоскопа в каждой точке измерения может быть установлено по 3 датчика, измеряющих составляющие поля по осям прямоугольной системы координат.
Сводная таблица отличий предлагаемого способа от известного приведена в дополнительных материалах к описанию предлагаемого способа.
Поле в области дефекта, которое характеризуется комплексом признаков:
а) наличие точек, в которых Hн = 0 или производная dHн/dX = 0;
б) изменение знака производных dH/dX;
в) наличием максимальных значений производных на соответствующих участках поля;
г) распределением gradH по оси X;
д) расстоянием между точками с нулевым значением нормальной составляющей поля Hн или ее производной dHн/dX нами названо "Образом поля" или картиной поля в области дефекта, "Образ поля" - это векторная функция распределения напряженности поля на линии расположения датчиков в плоскости, перпендикулярной проверяемой поверхности и направлению распространения продольных трещин.
Картины полей нами излучались непосредственным наблюдением за кинетикой ферромагнитных частиц в области дефектов и путем киносъемок через микроскоп (см. Магнитные индикаторы и приборы магнитопорошкового контроля. Г.С. Шелихов - автор сценария. Кинофильм, цветной, звуковой, 3 части, Произ-во киностудии МО СССР, 1981).
Предложенный способ проверялся на образцах, вырезанных из труб магистрального газотрубопровода с искусственными и возникшими в эксплуатации дефектами. Разработана программа для обработки на ЭВМ результатов измерения.
Таким образом, предложенная и обоснованная совокупность признаков является необходимой и достаточной для получения положительного эффекта - повышения надежности и чувствительности способа обнаружения продольных трещин и других дефектов в протяженных ферромагнитных объектах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАГНИТНОГО КОНТРОЛЯ | 1996 |
|
RU2095804C1 |
| УСТРОЙСТВО МАГНИТНО-ПОИСКОВОЙ СИСТЕМЫ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2000 |
|
RU2204130C2 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ ТРУБОПРОВОДОВ | 2002 |
|
RU2229707C1 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП ДЛЯ ВНУТРИТРУБНОГО КОНТРОЛЯ | 2003 |
|
RU2250458C1 |
| УСТРОЙСТВО МАГНИТНО-ПОИСКОВОЙ СИСТЕМЫ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2003 |
|
RU2240550C1 |
| Способ магнитопорошкового контроля | 1981 |
|
SU958953A1 |
| ТЕСТ-ОБРАЗЕЦ ДЛЯ МАГНИТОПОРОШКОВОЙ ДЕФЕКТОСКОПИИ | 1994 |
|
RU2092831C1 |
| Способ магнитопорошкового контроля деталей сложной формы | 1981 |
|
SU958954A1 |
| Способ магнитопорошкового контроля | 1979 |
|
SU789728A1 |
| Индикатор зон выявляемости дефектов при магнитопорошковом контроле | 1984 |
|
SU1195237A1 |
Изобретение относится к области неразрушающего контроля и может быть использовано для выявления дефектов в протяженных объектах, например в трубах магистрального трубопроводного транспорта. Способ заключается в том, что изделие или участок изделия намагничивают, а магнитные поля, возникающие над дефектами, обнаруживают датчиками, которые перемещают над проверяемой поверхностью. По сигналам с датчиков строится векторная функция распределения напряженности магнитного поля по линии расположения датчиков. Определяют совокупность информативных параметров, которые сравнивают со значениями аналогичных параметров эталонных функций, характеризующих типовые дефекты. По результатам сравнения определяют наличие, параметры и типы дефектов. Изобретение позволяет повысить чувствительность и надежность контроля труб и других протяженных объектов. 1 табл., 11 ил.
Способ магнитного контроля ферромагнитных изделий, заключающийся в том, что датчики магнитного поля перемещают над проверяемой поверхностью, которую намагничивают, снимают сигналы с датчиков, отличающийся тем, что по сигналам с датчиков по линии их расположения, в плоскости, перпендикулярной проверяемой поверхности и направлению распространения трещин, определяют векторную функцию распределения напряженности магнитного поля как совокупность информативных признаков и параметров, таких, как наличие точек с нулевым значением нормальной составляющей напряженности поля или ее производной по оси, параллельной проверяемой поверхности и перпендикулярной вектору скорости перемещения датчиков, изменение знака производных поля по этой оси, максимальное их значение, расстояние между точками, в которых нормальная составляющая напряженности поля равна нулю, сравнивают определенную векторную функцию с хранящимися в памяти ЭВМ эталонными векторными функциями, полученными с учетом поля фона, и по результатам сравнения определяют наличие дефекта, а его характеристики вычисляют с использованием зависимостей, введенных в память ЭВМ.
| Advanced Pipeline Inspection Systems | |||
| Проспект фирмы H.Rosen Engineering, 1994; SU 1769105 A2, 15.10.92 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |

