Изобретение относится к области магнитных методов неразрушающего контроля и может быть использовано для выявления дефектов в протяженных объектах, например в трубах магистрального трубопроводного транспорта.
Известен способ магнитного контроля, разработанный ИТЦ "Орггаздефектоскопия" и используемый в инспекционных снарядах "Крот-1000М" и "Крот-1200М", (см. "Дополнительные материалы"). В указанных снарядах-дефектоскопах применен метод регистрации рассеяния магнитного потока, возникающего над дефектом. Сигналы от дефектов в трубопроводе, обнаруженных снарядом-дефектоскопом, записываются и обрабатываются при помощи компьютерных программ и графически отображаются на экране.
Недостатком этого метода является то, что при анализе полученной информации рассматривается только амплитудное значение сигнала, что не позволяет достоверно определить вид дефекта.
Известен способ магнитного контроля магистральных трубопроводов (юбилейный сборник МНПО "Спектр", 1994, Г.А.Жукова, Л.А.Хватов, Развитие метода и средств магнитной диагностики магистральных газопроводов; см. "Дополнительные материалы"), который заключается в том, что датчики, установленные по окружности с внутренней стороны трубы, регистрируют изменение магнитного поля в области дефекта. При этом анализируется только абсолютное значение амплитуды сигнала, что не позволяет достоверно распознать вид дефекта и, кроме того, затрудняет проведение анализа из-за регистрации датчиками сигналов помехи, связанной с изменением зазора между магнитной системой и внутренней поверхностью трубы, изменением скорости движения магнитной системы, вибрацией и др.
Наиболее близким по технической сущности к предлагаемому способу является способ магнитного контроля (Патент на изобретение №2118816), который заключается в следующем.
Датчики магнитного поля установлены в магнитной системе по одной линии, перпендикулярной к магнитной нейтрали, образуя "гребенку". В каждой точке измерения установлено по 2 датчика для измерения тангенциальной и нормальной составляющих поля.
Магнитная система с датчиками перемещается над проверяемой поверхностью изделия вдоль трещины. При прохождении магнитной системы над трещиной с датчиков снимаются сигналы, которые маркированы, т.е. несут информацию о номерах и координатах датчиков, с которых они сняты.
По сигналам с датчиков вычисляются векторы напряженности поля по линии установки датчиков. По данным вычисления векторов поля строится векторная функция распределения поля, которая сравнивается с векторной функцией распределения, введенной ранее в память ЭВМ. Сравнение осуществляется с учетом наличия характерных признаков. Затем по формульным зависимостям, введенным в память ЭВМ, и по измеренным значениям параметров вычисляются характеристики трещин (глубина, ширина и др.). Векторные функции распределения поля для идентичных трещин, имеющих различные координаты относительно полюсов намагничивающего устройства, различны, так как для этих точек существенно отличается поле фона.
В данном способе с датчиков магнитного поля снимается абсолютное значение сигнала, что затрудняет распознавание продольных и поперечных дефектов, так как такие сигналы аналогичны сигналам помехи, возникающей, например, из-за изменения зазора между движущейся магнитной системой и внутренней поверхностью трубы, колебаний магнитной системы, изменения ее скорости и др.
Предлагаемый способ лишен указанного недостатка. С целью надежного выявления поперечных и продольно-ориентированных дефектов в трубе предлагается способ магнитного контроля, сущность которого состоит в следующем.
На чертежах обозначено:
Фиг.1 - схема расположения магнитной системы в трубе:
а) схема расположения матрицы датчиков магнитного поля в межполюсном пространстве;
б) схема дифференциального подключения датчиков в варианте "через два".
1...10 - датчики магнитного поля;
11 - продольная трещина;
12 - поперечная трещина;
13 - направление образующей трубы.
14, 15 - магнитные полюсы;
16 - матрица датчиков.
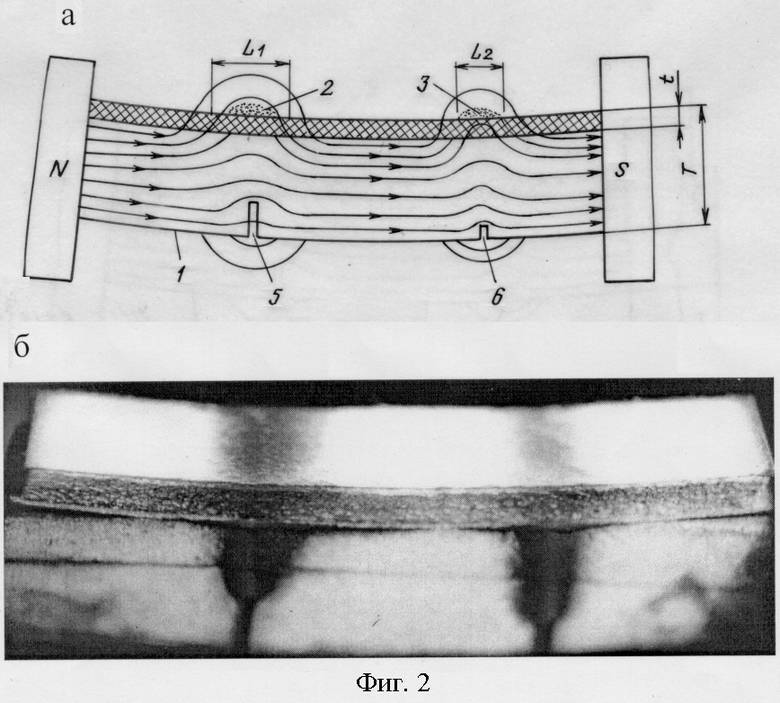
Фиг.2 - распределение поля в области разрезов в области темплетов, вырезанных из трубы:
а) распределение магнитных силовых линий.
1 - сечение темплета трубы;
2, 3 - скопление порошка;
5 - надрез глубиной 0.4 Т;
6 - надрез глубиной 0.15 Т;
Т - толщина темплета (трубы);
t - толщина немагнитного слоя;
L1 - ширина области скопления порошка над надрезом глубиной 0.4 Т;
L2 - ширина области скопления порошка над надрезом глубиной 0.15 Т;
7 - немагнитная пластина толщиной 5 мм;
N, S - полюсы электромагнита;
б) индикаторный рисунок порошка, осевшего в области дефекта
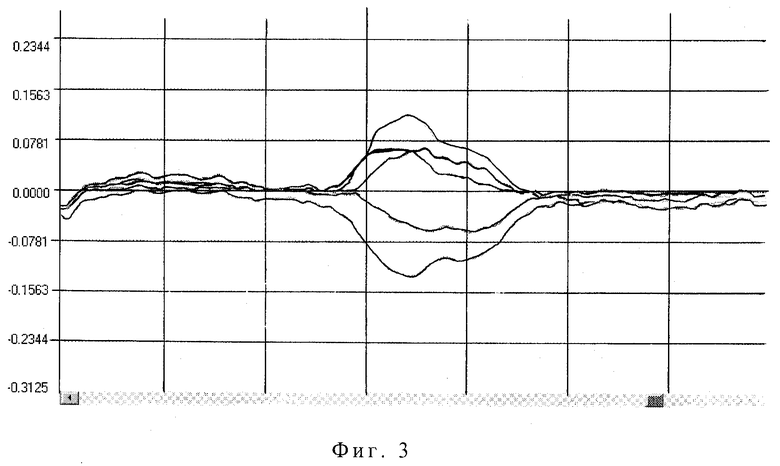
Фиг.3 - сигнал от продольной трещины.
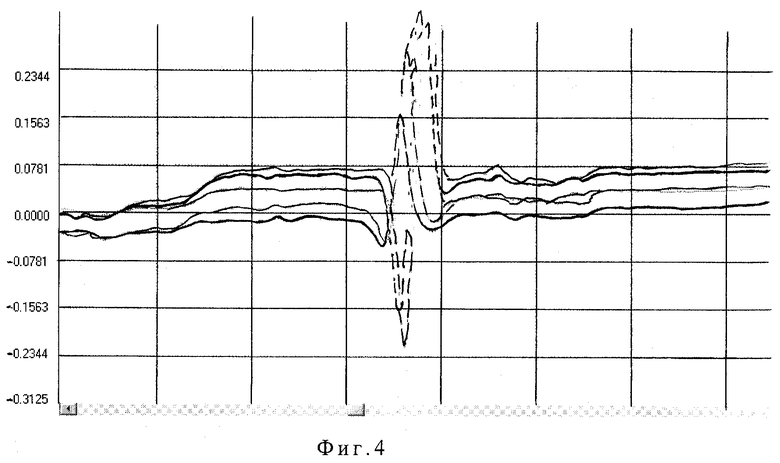
Фиг.4 - сигнал от поперечной трещины.
Фиг.5 - сигнал от помехи (изменение зазора между магнитной системой и поверхностью трубы) на бездефектном месте.
Датчики магнитного поля, расположенные на магнитной нейтрали, размещают на расстоянии 5...10 мм друг от друга, причем так, что плоскость каждого датчика параллельна магнитным силовым линиям, и включают попарно по дифференциальной схеме. В зависимости от требований к параметрам выявляемых дефектов в дифференциальную пару могут включаться датчики, расположенные на расстоянии 20...30 мм друг от друга, причем некоторые датчики могут входить в две дифференциальные пары. Пример схемы дифференциального подключения "через два" приведен на фиг.1б (1-4, 2-5, 3-6, 4-7, 5-8, 6-9, 7-10 - датчики, включенные по дифференциальной схеме). По виду ("образу") сигналов, снимаемых с датчиков магнитного поля, определяют совокупность информативных параметров, которые позволяют различать поперечные и продольно-ориентированные дефекты.
Дифференциальное подключение датчиков магнитного поля позволяет в значительной степени скомпенсировать сигнал помехи, связанный с изменением зазора между намагничивающей системой и внутренней поверхностью трубы или другого инспектируемого объекта, а также колебаниями и изменением ее скорости.
При указанном способе подключения датчиков сигналы от продольных трещин имеют характерный признак, состоящий в том, что в зависимости от расположения трещины в пространстве между датчиками сигналы от одной или нескольких дифференциальных пар датчиков обязательно будут находиться в противофазе по отношению к сигналам от остальных пар датчиков данной магнитной системы. В большинстве случаев наблюдается и некоторый сдвиг по фазе между сигналами от различных датчиков, так как направление трещины, как правило, не бывает строго параллельным направлению движения магнитной системы, а линия расположения датчиков находится под углом 45° к этому направлению, и датчики фиксируют дефект поочередно.
Признаками, отличающими сигналы от поперечной трещины, являются очень резкое изменение амплитуды сигнала с последующим изменением его полярности, малая длительность сигнала и практически одинаковое отклонение амплитуды как в положительную, так и в отрицательную область. Кроме того, имеет место практически постоянный сдвиг по фазе между сигналами от различных дифференциальных пар датчиков магнитной системы (так как датчики фиксируют дефект поочередно).
И, наконец, сигнал от помехи отличается тем, что все датчики реагируют на помеху одновременно, поэтому сигналы от датчиков будут изменяться синхронно.
Предлагаемый способ апробирован на экспериментальном стенде.
При проведении эксперимента датчики магнитного поля были расположены в межполюсном пространстве по магнитной нейтрали, а магнитная система, которая передвигалась вдоль трубы, установлена так, что вектор магнитной индукции направлен под углом 45 градусов по отношению к образующей трубы (фиг.1а).
Для выбора оптимального расстояния между соседними датчиками была экспериментально определена протяженность магнитного поля над внутренней поверхностью трубы на расстоянии 5 мм от нее. С этой целью вырезались темплеты 1 из трубы (фиг.2), на поверхности которых делались надрезы 5, 6 различной глубины. При помещении темплета 1 в электромагнит N, S и создании магнитного поля наносилась воздушная взвесь высокодисперсного магнитного порошка, который осаждался в области искусственного дефекта. Измерения ширины полоски из осевшего порошка, которая пропорциональна эффективному значению магнитного поля над дефектом, показали, что при изменении глубины трещины в пределах 15...40% от толщины стенки трубы протяженность поля изменяется в пределах 13...16 мм. Экспериментально было установлено, что расстояние между датчиками 5...10 мм при глубине трещины не менее 15% от толщины трубы гарантирует появление сигнала от дефекта хотя бы на одном из рядом стоящих датчиков. Кроме того, определено, что оптимальное расстояние между датчиками в дифференциальной паре находится в пределах 20...30 мм. При меньшем расстоянии снижается уровень регистрируемого сигнала, так как уменьшается градиент поля в точках расположения дифференциально подключенных датчиков. При большем расстоянии увеличивается влияние сигнала от помехи, так как, например, из-за локальной деформации стенки трубы может заметно отличаться зазор в точках расположения датчиков между магнитной системой и внутренней поверхностью трубы.
Некоторые из полученных результатов приведены на фиг.3, 4, 5. На указанных фигурах показаны виды сигналов, снимаемых с датчиков магнитного поля от таких дефектов, как продольная и поперечная трещины в стенке трубы, а также сигналы, связанные с изменением зазора между магнитной системой и внутренней поверхностью трубы.
Как видно из приведенных данных, сигналы от магнитных полей разнонаправленных дефектов принципиально отличаются друг от друга и от сигналов помехи, что позволяет их легко распознать.
На фиг.3 показан сигнал, снятый пятью дифференциальными парами датчиков при прохождении магнитной системы над продольной трещиной в трубе диаметром 1220 мм. Отличительным признаком продольной трещины в данном случае является то, что сигналы от двух дифференциальных пар датчиков находятся в противофазе с остальными тремя парами. Кроме того, между сигналами от датчиков имеется некоторый сдвиг по фазе.
Фиг.4 иллюстрирует признаки, характерные для сигналов от поперечной трещины. Как указывалось выше, такими признаками являются резкие нарастание и снижение амплитуды сигнала и мало отличающееся отклонение амплитуды сигнала в положительную и отрицательную область. Здесь также наблюдается постоянный сдвиг по фазе между сигналами от различных датчиков магнитной системы.
Сигналы от датчиков, полученные при движении магнитной системы по бездефектному месту трубы при изменении зазора между магнитной системой и внутренней поверхностью трубы, показаны на фиг.5. В данном случае все сигналы от датчиков изменяются синфазно, что принципиально отличает их от сигналов, полученных при прохождении над продольной трещиной.
Таким образом, приведенная и обоснованная совокупность признаков предлагаемого способа является необходимой и достаточной для выявления и распознания продольных и поперечных дефектов в трубах магистрального трубопровода.
Использование предложенного способа на снарядах-дефектоскопах обеспечит надежное выявление продольных и поперечных дефектов в трубах трубопроводного транспорта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МАГНИТНО-ПОИСКОВОЙ СИСТЕМЫ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2003 |
|
RU2240550C1 |
| УСТРОЙСТВО ДЛЯ МАГНИТНОГО КОНТРОЛЯ | 1996 |
|
RU2095804C1 |
| УСТРОЙСТВО МАГНИТНО-ПОИСКОВОЙ СИСТЕМЫ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2000 |
|
RU2204130C2 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП ДЛЯ ВНУТРИТРУБНОГО КОНТРОЛЯ | 2003 |
|
RU2250458C1 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ | 1996 |
|
RU2118816C1 |
| Способ и устройство двойного намагничивания для обнаружения и идентификации трещин в стальных трубопроводах | 2024 |
|
RU2838440C1 |
| МАГНИТНЫЙ ПРОХОДНОЙ ДЕФЕКТОСКОП | 1998 |
|
RU2144182C1 |
| УСТРОЙСТВО РАЗМАГНИЧИВАНИЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2005 |
|
RU2285254C1 |
| Способ скоростной магнитной дефектоскопии длинномерных изделий | 2019 |
|
RU2707977C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РАЗРУШАЮЩЕГО ИСПЫТАНИЯ ТРУБОПРОВОДОВ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2482462C2 |

Изобретение относится к области техники неразрушающего контроля труб магистрального трубопроводного транспорта. Технический результат: повышение надежности и чувствительности к обнаружению дефектов в трубах магистральных трубопроводов. Сущность: датчики магнитного поля, расположенные на магнитной нейтрали в межполюсном пространстве постоянных магнитов, размещают на заданном расстоянии друг от друга так, что плоскость каждого датчика параллельна силовым линиям магнитных полюсов. Датчики попарно включают по дифференциальной схеме. По характерным признакам сигналов, снимаемых с датчиков при движении магнитной системы внутри трубы, различают поперечные и продольно-ориентированные дефекты в трубе. 5 ил.

Способ магнитного контроля при внутритрубной диагностике, заключающийся в том, что датчики магнитного поля располагают в межполюсном пространстве по магнитной нейтрали, а магнитную систему устанавливают так, что вектор магнитной индукции направлен под углом 45° по отношению к образующей трубы и передвигают ее вдоль трубы, отличающийся тем, что датчики магнитного поля размещают на расстоянии 5-10 мм друг от друга, причем так, что плоскость каждого датчика параллельна силовым линиям магнитных полюсов, и включают попарно по дифференциальной схеме, а расстояние между дифференциально включенными датчиками в каждой паре устанавливают в пределах 20-30 мм, и по характерным признакам сигнала различают поперечные и продольно-ориентированные дефекты в трубе.
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2133032C1 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ | 1996 |
|
RU2118816C1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНЫХ ОБСЛЕДОВАНИЙ ТРУБОПРОВОДОВ | 1994 |
|
RU2102738C1 |
| US 3899734 А, 12.08.1975 | |||
| US 3968194 A, 29.06.1976. | |||

