Изобретение относится к области магнитных измерений, в частности к феррозондовым бортовым навигационным магнитометрам.
Сложность измерения магнитного поля Земли на борту подвижного объекта в значительной степени обусловлена воздействием низкочастотных помех, появление которых вызвано вибрацией основания, на котором укреплен феррозондовый датчик, магнитными наводками от борт-сети, токопотребляющих цепей и нагрузок и источников электромагнитного излучения. Изменяемый характер измеряемого магнитного поля Земли с одной стороны и воздействие низкочастотных помех с другой стороны, на борту подвижного объекта, вызывают потребность снижения динамической погрешности в области малых значений частот полезного сигнала при обеспечении высокого помехоподавления на низких частотах, что является трудно достижимой задачей в известных магнитометрах.
Известны устройства для измерения магнитных полей (Н.М.Семенов, Н.И. Яковлев. Цифровые феррозондовые магнитометры. Л.: Энергия. Ленинградское отделение, 1978, с. 30, 137 и 140), содержащие последовательно соединенные феррозонд, полосовой усилитель, фазочувствительный детектор и фильтр нижних частот, выход которого соединен с компенсационной обмоткой феррозонда, обмотка возбуждения которого подключена к первому выходу генератора, второй выход которого соединен через фазокорректирующую цепь со входом управления фазочувствительного детектора.
Работа устройства основана на широко известном методе выпрямления сигнала второй гармоники на выходе феррозонда. Устройство работает следующим образом.
Выходное напряжение переменного тока феррозонда, возбуждаемого генератором, подается на вход полосового усилителя, выделяющего полезный сигнал второй гармоники частоты возбуждения феррозонда, выпрямляемый фазочувствительным детектором. Далее пульсации выходного сигнала детектора сглаживаются фильтром нижних частот. Управление фазочувствительного детектора осуществляется сигналом, поступающим на его вход управления со второго выхода генератора через фазокорректирующую цепь. С помощью последней осуществляется корректировка фазы управляющего сигнала. Для обеспечения автоматической компенсации измеряемого поля в объеме феррозонда ток с выхода фильтра нижних частот подается в компенсационную обмотку феррозонда, создавая в ней поле обратной связи, направленное встречно измеряемому. Выход фильтра нижних частот является аналоговым выходом известного устройства. С помощью фильтра нижних частот обеспечивается подавление пульсаций, обусловленных как внутренними шумами, так и внешними низкочастотными помехами.
Недостатком данного устройства является невысокое быстродействие, обусловленное инерционностью фильтра нижних частот. Действительно, для обеспечения высокого подавления внешних помех известная реализация фильтра нижних частот в аналоговом магнитометре требует большой постоянной времени, что значительно снижает быстродействие устройства в целом.
Известная реализация полосового усилителя для выделения сигнала на частоте второй гармоники требует необходимости индуктивных и емкостных элементов или в случае применения активных фильтров, - необходимости реализации большой постоянной времени, все это в значительной степени снижает возможность микроминиатюризации.
В последнее время широкое применение находят устройства для измерения магнитных полей с конструкцией моноблочного типа, т.е. с совмещением феррозондов и электронной части устройства в едином конструктивном исполнении. В таких устройствах наличие индуктивных фильтров практически не допустимо, т. к. они оказывают сильное электромагнитное влияние на феррозонды и искажают измеряемое магнитное поле вблизи феррозондов, снижая тем самым точность измерения.
Наиболее близким по технической сущности к предлагаемому и выбраннм в качестве прототипа является устройство для измерения магнитных полей (А.С. N 721783, заявлено 04.11.77 (21) 2539027/18-21, кл. G 01 R 33/02, бюллетень N 10 от 15.03.80), лишенное многих вышеперечисленных недостатков, содержащее последовательно соединенные феррозонд, первый интегрирующий дискретизатор, ключ, второй интегрирующий дискретизатор и широтно-импульсный модулятор с измерителем временного интервала, генератор, первый выход которого соединен с обмоткой возбуждения феррозонда, а второй - с входом устройства управления, выходы которого соединены с входами управления интегрирующих дискретизаторов, ключа и широтно-импульсного модулятора, выход которого соединен с компенсационной обмоткой феррозонда.
Устройство работает следующим образом.
В обмотку возбуждения феррозонда с выхода генератора подается напряжение возбуждения частоты f. С выхода феррозонда на вход первого интегрирующего дискретизатора поступает сигнал, спектр которого содержит четные и нечетные гармоники. Информацию об измеряемом поле несет вторая гармоника. На управляющий вход первого и второго интегрирующих дискретизаторов подаются от устройства управления короткие импульсы с частотой следования, равной соответственно 4f и 4/3f, причем начала тактов работы интегрирующих дискретизаторов совпадают. За каждый такт работы первого и второго интегрирующих дискретизаторов, равный соответственно 1/4f и 3/4f, происходит интегрирование входных величин и величин собственных (внутренних) обратных связей, в результате чего на выходах формируются двухполярные прямоугольные сигналы, амплитуда которых пропорциональна среднему значению входного напряжения за время интегрирования. Выходное напряжение первого интегрирующего дискретизатора через ключ подается на вход второго. Ключ замыкается и размыкается таким образом, что в течение каждого нечетного такта работы второго интегрирующего дискретизатора на его вход подаются выходные импульсы первого интегрирующего дискретизатора с нечетными номерами, а в течение каждого четного - соответственно импульсы с четными номерами. В результате преобразований амплитуда двухполярного напряжения на выходе второго интегрирующего дискретизатора пропорциональна измеряемому полю и результат преобразования не содержит помехи представленной суммой нечетно-гармонических и квадратурной составляющих. Далее выходной сигнал второго интегрирующего дискретизатора с помощью широтно-импульсного модулятора преобразуется во временной интервал, измеряемый измерителем временного интервала. Выходной сигнал широтно-импульсного модулятора, являясь сигналом обратной связи, подается в компенсационную обмотку феррозонда. Таким образом цифровой эквивалент, получаемый в измерителе временного интервала, является окончательным результатом измерения и не содержит ферромодуляционной помехи.
Недостатками данного устройства являются низкая помехозащищенность, обусловленная недостаточным подавлением ферромодуляционных помех, вызванным нестабильностью частоты возбуждения, недостаточным подавлением внешних низкочастотных помех, а также аппаратурной избыточностью при необходимости формирования выходного аналогового сигнала.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является повышение точности и помехозащищенности устройства.
Указанный результат достигается тем, что в устройство для измерения магнитных полей, содержащее последовательно соединенные феррозонд и первый интегрирующий дискретизатор, второй интегрирующий дискретизатор, усилитель, устройство управления и генератор, первый выход которого соединен с обмоткой возбуждения феррозонда, а второй выход - с входом устройства управления, первый и третий выходы которого соединены с входами управления соответственно первого и второго интегрирующих дискретизаторов, дополнительно введены первый масштабный преобразователь, вход которого через конденсатор соединен с выходом первого интегрирующего дискретизатора, а выход - с входом второго интегрирующего дискретизатора, выход которого соединен с входом усилителя, выполненного по схеме усилителя переменного напряжения, выход которого соединен с входом цепи, содержащей последовательно соединенные фазочувствительный демодулятор, второй масштабный преобразователь и третий интегрирующий дискретизатор, выход которого соединен с компенсационной обмоткой феррозонда, причем входы управления первого масштабного преобразователя соединены с вторыми выходами устройства управления, четвертый, пятый и шестой выходы которого соединены с входами управления соответственно фазочувствительного демодулятора, второго масштабного преобразователя и третьего интегрирующего дискретизатора.
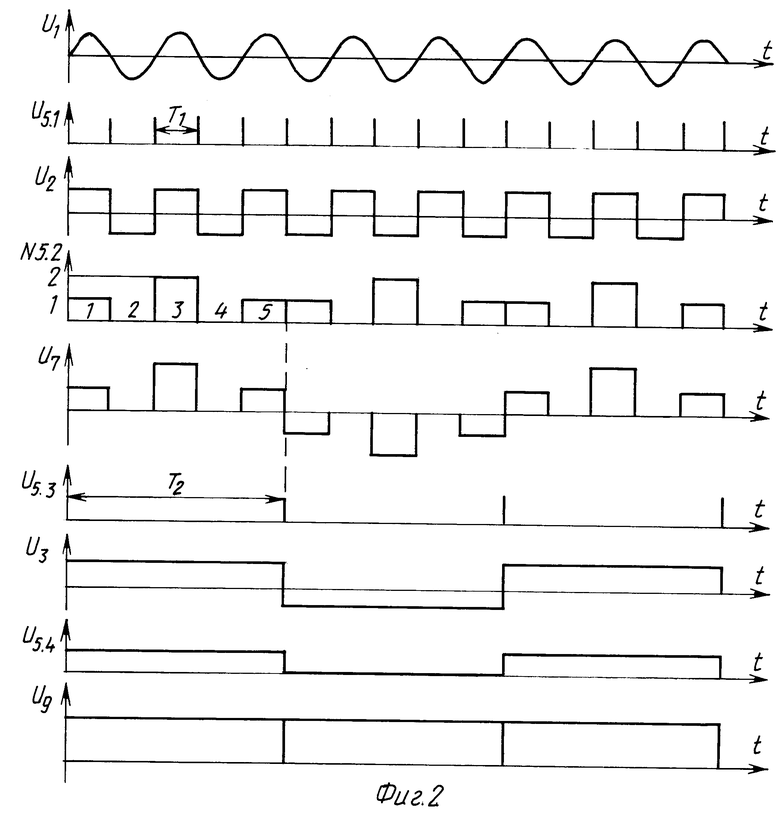
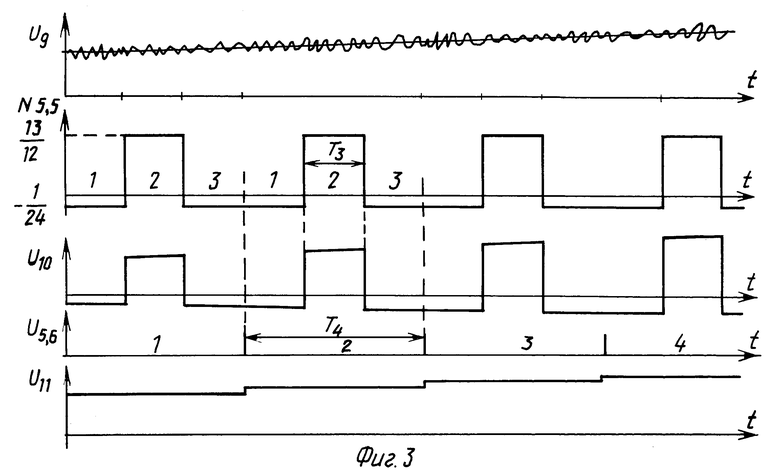
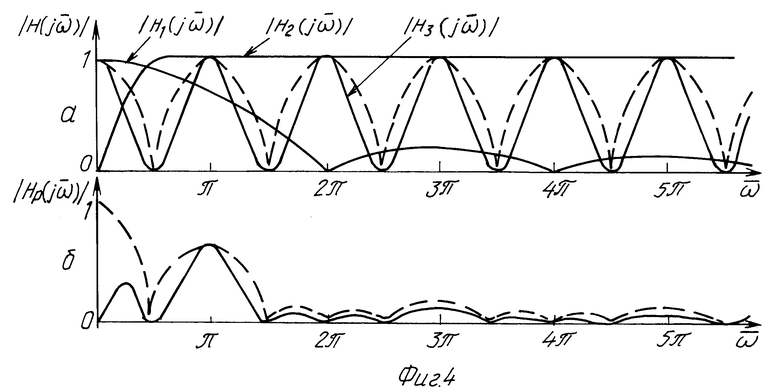
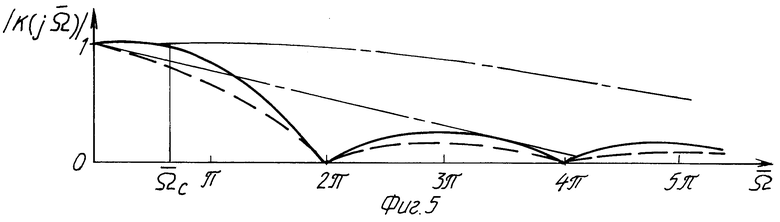
На фиг. 1 показана структурная схема предлагаемого устройства для измерения магнитных полей, на фиг. 2 и 3 - временные диаграммы работы, а на фиг. 4 и 5 - амплитудно-частотные характеристики.
Устройство для измерения магнитных полей содержит последовательно соединенные феррозонд 1 и первый интегрирующий дискретизатор 2, второй интегрирующий дискретизатор 3, усилитель переменного напряжения 4, устройство управления 5, генератор 6, первый выход которого соединен с обмоткой возбуждения феррозонда 1, а второй выход - с входом устройства управления 5, первый (5.1) и третий (5.3) выход которого соединены с входами управления соответственно первого 2 и второго 3 интегрирующих дискретизаторов, первый масштабный преобразователь 7, вход которого через конденсатор 8 соединен с выходом первого интегрирующего дискретизатора 2, а выход - с входом второго интегрирующего дискретизатора 3, выход которого соединен с входом усилителя переменного напряжения 4, выход которого соединен с входом цепи, содержащей последовательно соединенные фазочувствительный демодулятор 9, второй масштабный преобразователь 10 и третий интегрирующий дискретизатор 11, выход которого соединен с компенсационной обмоткой феррозонда 1, причем входы управления первого масштабного преобразователя 7 соединены с вторыми выходами (5.2) устройства управления 5, четвертый (5.4), пятый (5.5) и шестой (5.6) выходы которого соединены с входами управления соответственно фазочувствительного демодулятора 9, второго масштабного преобразователя 10 и третьего интегрирующего дискретизатора 11.
Возможны два варианта реализации предлагаемого устройства, т.е. разомкнутая и замкнутая структура. Второй вариант предполагает наличие отрицательной обратной связи, охватывающей канал прямого преобразования, которая образуется подачей выходного сигнала третьего интегрирующего дискретизатора 11 в компенсационную обмотку феррозонда 1 согласно фиг.1. В данном случае целесообразно начать рассмотрение первого варианта реализации, т.е. канал прямого преобразования, работа которого осуществляется следующим образом.
В обмотку возбуждения феррозонда 1 с выхода генератора 6 подается напряжение возбуждения частоты f. С выхода феррозонда 1 на вход первого интегрирующего дискретизатора 2 поступает сигнал, спектр которого содержит четные и нечетные гармоники. Информацию об измеряемом поле B несет вторая гармоника U1(t) (фиг. 2). На управляющий вход первого 2 и второго 3 интегрирующих дискретизаторов подаются соответственно с первого и третьего выходов устройства управления 5 короткие импульсы напряжений U5.1 и U5.3, с частотами следования, равными соответственно 4f и 4/5f, причем, начала тактов работы интегрирующих дискретизаторов 2 и 3 совпадают. За каждый такт работы первого 2 и второго 3 интегрирующих дискретизаторов, равный соответственно T1=1/4f и T2 = 5T1 = 5/4f, происходит интегрирование их входных величин и величин их собственных внутренних обратных связей (согласно структуре интегрирующего дискретизатора, описанного в прототипе), в результате чего на выходах формируются двухполярные прямоугольные сигналы U2 и U3, амплитуда которых пропорциональна среднему значению входного напряжения за время интегрирования. Выходное напряжение U2 первого интегрирующего дискретизатора 2 через разделительный конденсатор 8 и первый масштабный преобразователь 7 подается на вход второго интегрирующего дискретизатора 3. В течение интервалов преобразования, равных T2 в каждом i-ом такте (i = 1, 2, ... 5), длительностью T1 осуществляется масштабное преобразование выходной величины U2 первого интегрирующего дискретизатора 2 с помощью масштабного преобразователя 7, управляемого выходным кодом N5.2 устройства управления 5, т.е. осуществляется умножение величин U2 и N5.2. На выходе масштабного преобразователя 7 в каждом i-м такте формируется напряжение
U
Значения кода N
Выходной сигнал U9 демодулятора 9 фиг. 3 является смесью полезного сигнала и внешних низкочастотных помех, проникающих на выход демодулятора 9. С помощью второго масштабного преобразователя 10 и третьего интегрирующего дискретизатора 11 осуществляется весовое интегрирование выходного сигнала фазочувствительного демодулятора 9, в результате чего подавляются низкочастотные помехи. Интервал интегрирования T4 формируется с помощью коротких выходных импульсов U5.6 устройства управления 5, подаваемых на вход управления интегрирующего дискретизатора 11. В течение интервалов интегрирования T3 в каждом q-такте (q = 1, 2, 3) осуществляется масштабное весовое преобразование выходного напряжения U9 фазочувствительного демодулятора 9, т.е. умножение этого напряжения на симметричную (относительно середины интервала T4) ступенчатую весовую функцию, заданную кодом N5.5 на интервале T4. На выходе масштабного преобразователя 10 в каждом q-м такте также формируется напряжение
U
а на выходе интегрирующего дискретизатора 11 формируется ступенчатое напряжение U11 = Uвых.
Эффективность частотно-избирательного выделения выходного полезного сигнала феррозонда 1, описываемого временными диаграммами фиг. 2, можно оценить с помощью нормированных амплитудно-частотных характеристик (АЧХ) канала аналого-дискретной фильтрации (до входа масштабного преобразователя 10), представленных на фиг. 4.
Рассмотрим АЧХ на частотной оси  относительное значение частоты входного воздействия. Следовательно, частоте первой гармоники
относительное значение частоты входного воздействия. Следовательно, частоте первой гармоники  и частоте второй гармоники
и частоте второй гармоники  будут соответствовать относительные частоты
будут соответствовать относительные частоты  т.е. нечетным гармоникам соответствуют частоты
т.е. нечетным гармоникам соответствуют частоты  а четным - частоты
а четным - частоты  K = 1, 2, 3, ... Как известно (Измерения. Контроль. Автоматизация. Выпуск 5 (39). Научно-технический реферативный сборник. Москва, 1981, с. 4 - 7, или Э.К. Шахов, В.Д. Михотин. Интегрирующие развертывающие преобразователи напряжения. М.: Энергоатомиздат, 1986, с. 19), интегрирующий дискретизатор 2, в данном случае имеющий прямоугольную весовую функцию, характеризуется убывающей АЧХ, представленной на фиг. 4а, кривой
K = 1, 2, 3, ... Как известно (Измерения. Контроль. Автоматизация. Выпуск 5 (39). Научно-технический реферативный сборник. Москва, 1981, с. 4 - 7, или Э.К. Шахов, В.Д. Михотин. Интегрирующие развертывающие преобразователи напряжения. М.: Энергоатомиздат, 1986, с. 19), интегрирующий дискретизатор 2, в данном случае имеющий прямоугольную весовую функцию, характеризуется убывающей АЧХ, представленной на фиг. 4а, кривой  имеющей в точках 2πK (K = 1, 2, 3, . ..) частотной оси однократные нули.
имеющей в точках 2πK (K = 1, 2, 3, . ..) частотной оси однократные нули.
Дискретный фильтр, содержащий первый масштабный преобразователь 7 и второй интегрирующий дискретизатор 3, имеет АЧХ, представленную кривой  на фиг. 4а в виде периодической функции с двукратными нулями в точках частотной оси по всем нечетным гармоникам. АЧХ конденсатора 8 представлена кривой
на фиг. 4а в виде периодической функции с двукратными нулями в точках частотной оси по всем нечетным гармоникам. АЧХ конденсатора 8 представлена кривой  Для сравнения пунктирной кривой на фиг. 4а показана АЧХ дискретного фильтра прототипа. На фиг. 4б представлена результирующая АЧХ
Для сравнения пунктирной кривой на фиг. 4а показана АЧХ дискретного фильтра прототипа. На фиг. 4б представлена результирующая АЧХ  образованная произведением составляющих АЧХ, представленных на фиг. 4а. Пунктиром на фиг. 4б показана результирующая АЧХ прототипа.
образованная произведением составляющих АЧХ, представленных на фиг. 4а. Пунктиром на фиг. 4б показана результирующая АЧХ прототипа.
С помощью АЧХ  конденсатора 8 обеспечивается спад результирующей характеристики
конденсатора 8 обеспечивается спад результирующей характеристики  в области низких частот и образование нуля на частоте
в области низких частот и образование нуля на частоте  , что способствует подавлению низкочастотных шумов феррозонда и дрейфа нуля интегрирующего дискретизатора 2. Как следует из фиг. 4б, характерной особенностью результирующей АЧХ является подъем на частоте второй гармоники и образование двукратных нулей по всем нечетным гармоникам, а также заметное убывание огибающей АЧХ при перемещении вправо по частотной оси. Более широкая зона нулей АЧХ на частотной оси по сравнению с прототипом значительно эффективнее, особенно на частотах первой
, что способствует подавлению низкочастотных шумов феррозонда и дрейфа нуля интегрирующего дискретизатора 2. Как следует из фиг. 4б, характерной особенностью результирующей АЧХ является подъем на частоте второй гармоники и образование двукратных нулей по всем нечетным гармоникам, а также заметное убывание огибающей АЧХ при перемещении вправо по частотной оси. Более широкая зона нулей АЧХ на частотной оси по сравнению с прототипом значительно эффективнее, особенно на частотах первой  и третьей
и третьей  гармоник, обеспечивает подавление ферромодуляционных помех при наличии нестабильности частоты возбуждения феррозонда 1. Следовательно, в предлагаемом устройстве заметно снижаются требования к стабильности характеристик генератора 6.
гармоник, обеспечивает подавление ферромодуляционных помех при наличии нестабильности частоты возбуждения феррозонда 1. Следовательно, в предлагаемом устройстве заметно снижаются требования к стабильности характеристик генератора 6.
Повышение качества подавления нечетных гармоник и низкочастотных шумов способствует в свою очередь повышению чувствительности измерительного канала введением усилителя переменного напряжения 4, т.к. в данном случае, при большом коэффициенте усиления обеспечивается отсутствие перегрузки измерительного канала от нечетных гармоник. Следует также отметить, что остаточные пульсации от нечетных гармоник, появляющиеся на выходе усилителя 4, полностью подавляются далее в последующем дискретном фильтре нижних частот.
Определим параметры и аналитическое выражение характеристик рассмотренного дискретного фильтра, содержащего масштабный преобразователь 7 и интегрирующий преобразователь 3.
Передаточная функция дискретного фильтра имеет вид
где Zm - нули уравнения H3(Z) = 0;
Zm - нули уравнения H3(Z) = 0;
h[n] - значения коэффициентов импульсной весовой функции.
Выберем корни Zm и вычислим коэффициенты h[n], при этом учтем правило, согласно которому следует, что для получения только действительных значений h[n] необходимо, чтобы корни Zm были комплексно-сопряженными. В данном случае при  имеем два комплексно-сопряженных значения
имеем два комплексно-сопряженных значения
Следовательно, согласно выражению (3)
H3(Z) = (Z - Z1)(Z - Z2) = (Z - j)(Z + j) = 1 + Z2 (4)
откуда получаем коэффициенты h[n] импульсной весовой функции h[0] = 1; h[1] = 0; h[2] = 1, т.е. получаем передаточную функцию (4) и коэффициенты h[n] прототипа. Из (4) получим выражение для амплитудно-фазовой характеристики, используя формулу Эйлера
Следовательно АЧХ прототипа
Для обеспечения двукратного нуля в передаточную функцию полученного дискретного фильтра необходимо ввести еще одну пару комплексно-сопряженных значений, т.е.
H3(Z) = (Z - Z1)2(Z - Z2)2 = 1 + 2Z2 + Z4 (7)
откуда получаем коэффициенты h[n] импульсной весовой функции (предложенного устройства) дискретного фильтра
h[0] = 1; h[1] = 0; h[2] = 2; h[3] = 0; h[4] = 1
Представив передаточную функцию  с учетом выражения (7) в виде
с учетом выражения (7) в виде
получим соответствующую ей АЧХ
В предложенном устройстве АЧХ представленная выражением (9) обеспечивается реализацией весовой функции (N5.2 фиг. 2), ступени которой определяются вышепредставленными значениями коэффициентов h[n] (n = 0, 1, 2, ... 4) в соответствующих i-х тактах преобразования (i = 1, 2, 3, ... 5). В данном случае N
Следует отметить, что с помощью введенного кодоуправляемого масштабного преобразователя 7 в случае необходимости можно реализовать нули АЧХ и более высокой кратности.
На фиг. 5 с помощью нормированной АЧХ дискретного низкочастотного фильтра, содержащего второй масштабный преобразователь 10 и третий интегрирующий дискретизатор 11, показана эффективность подавления низкочастотных помех при отсутствии динамической погрешности. В данном случае АЧХ рассматривается на оси относительных частот  причем T3 >> T1 или что то же самое
причем T3 >> T1 или что то же самое 
Общим недостатком применяемых магнитометров является неравномерность их АЧХ на начальном участке оси частот, приводящая к появлению динамической погрешности. Так, например, в магнитометрах-аналогах применение интегрирующего звена в качестве фильтра нижних частот вызывает большую динамическую погрешность на верхней граничной частоте  спектра полезного сигнала (нижняя штрих-пунктирная прямая на фиг. 5). Уменьшение динамической погрешности, как правило, вызывает снижение помехоподавления (верхняя штрих-пунктирная кривая на фиг. 5).
спектра полезного сигнала (нижняя штрих-пунктирная прямая на фиг. 5). Уменьшение динамической погрешности, как правило, вызывает снижение помехоподавления (верхняя штрих-пунктирная кривая на фиг. 5).
В предлагаемом устройстве синтезом ступенчатой весовой функции, задаваемой кодом N5.5, разрешается противоречие между помехоподавлением и неравномерностью АЧХ. Так, например, применение простейшей весовой функции в виде прямоугольного окна (на фиг. 5 АЧХ показана пунктиром) уже заметно увеличивает помехоподавление вблизи граничной частоты  . Синтезом специальной весовой функции более успешно разрешается вышеуказанное противоречие. В данном случае весовая функция g(t) задается, например, кодом N5.5 (фиг. 3) и постоянной времени интегрирующего дискретизатора 11, равной 1/T3, т.е.
. Синтезом специальной весовой функции более успешно разрешается вышеуказанное противоречие. В данном случае весовая функция g(t) задается, например, кодом N5.5 (фиг. 3) и постоянной времени интегрирующего дискретизатора 11, равной 1/T3, т.е.
Значения весовой функции в каждом q-м такте преобразования
Рассматриваемая весовая функция в данном случае имеет следующие значения
откуда
Процесс интегрирования, осуществляемый в интегрирующем дискретизаторе 11 в течение первого интервала интегрирования T4 с учетом (2) и (11), представляется в следующем виде
где
α - - масштабный коэффициент.
Далее процесс преобразования повторяется.
Результат решения данной задачи представлен основной кривой  на фиг. 5. Незначительное усложнение весовой функции по сравнению с прямоугольной обеспечивает весьма ощутимый подъем АЧХ вблизи начального участка частотной оси. Динамическая погрешность γ преобразования в области нижних частот при использовании представленной весовой функции не превышает значений, определяемых выражением
на фиг. 5. Незначительное усложнение весовой функции по сравнению с прямоугольной обеспечивает весьма ощутимый подъем АЧХ вблизи начального участка частотной оси. Динамическая погрешность γ преобразования в области нижних частот при использовании представленной весовой функции не превышает значений, определяемых выражением
Применением более сложных специальных весовых функций, синтезированных по критерию максимальной равномерности АЧХ и максимального помехоподавления обеспечивает еще больший успех в решении данной задачи. Методы синтеза подобных весовых функций, а также некоторый выбор полученных, в том числе и показанная на фиг. 3 (N5.5), представлены в (Э.К. Шахов, В.Д. Михотин. Интегрирующие развертывающие преобразователи напряжения. М. : Энергоатомиздат, 1986, с. 99 - 112, 120 - 125).
Введение отрицательной обратной связи в канал прямого преобразования при реализации второго варианта устройства не ухудшает АЧХ, наоборот, улучшает равномерность АЧХ в полосе пропускания полезного сигнала на низких частотах при сохранении помехоподавления в области низких и высоких частот в полосе задержания.
Особенности реализации предлагаемого устройства не требуют больших аппаратурных затрат. Структура интегрирующих дискретизаторов 2, 3, 11 описана в прототипе, содержит последовательно соединенные интегратор, коммутатор и аналоговое запоминающее устройство, охваченные общей обратной связью. Исполнение масштабных преобразователей осуществляется с помощью переключаемых резисторов или кодоуправляемых делителей напряжения. Набор управляющих сигналов, в том числе и для весовых функций на выходах устройства управления 5 представляет собой импульсную последовательность логических сигналов, т.е. нулей и единиц. Код весовой функции N5.2 (фиг. 2) принимает три различных значения одного знака, следовательно для его формирования необходимо два разряда. Для формирования кода N5.5, принимающего в данном случае два различных значения разных знаков, также необходимо два разряда. Для более сложных весовых функций необходимо незначительное увеличение разрядности кода N5.5. Следовательно, реализация устройства управления 5 возможна на элементах дискретной логики и не требует больших аппаратурных затрат.
Таким образом, прелагаемое устройство реализуемо, обладает высокой точностью и высоким помехоподавлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ КОМПАС | 1997 |
|
RU2126524C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1994 |
|
RU2085962C1 |
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1998 |
|
RU2153682C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2003 |
|
RU2254672C2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2001 |
|
RU2210184C2 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ КОДА УГЛА В СИНУСНО-КОСИНУСНЫЕ НАПРЯЖЕНИЯ | 2001 |
|
RU2196383C1 |
Устройство предназначено для измерения магнитных полей. Оно содержит последовательно соединенные феррозонд 1, первый интегрирующий дискретизатор 2, конденсатор, первый масштабный преобразователь 7, второй интегрирующий дискретизатор 3, усилитель переменного напряжения 4, фазочувствительный демодулятор 9, второй масштабный преобразователь 10 и третий интегрирующий дискретизатор 11. Его выход соединен с компенсационной обмоткой феррозонда 1. Его обмотка возбуждения соединена с первым выходом генератора 6, второй выход генератора 6 соединен с входом устройства управления 5. Его выходы с первого по шестой соединены с входами управления соответственно первого интегрирующего дискретизатора 3, первого масштабного преобразователя 7, второго интегрирующего дискретизатора 3, фазочувствительного демодулятора 9, второго масштабного преобразователя 10 и третьего интегрирующего дискретизатора 11. Реализацией весового интегрирования в канале преобразования осуществляется подавление внутренних ферромодуляционных и внешних низкочастотных и высокочастотных помех, что значительно повышает точность и помехоустойчивость устройства. 5 ил.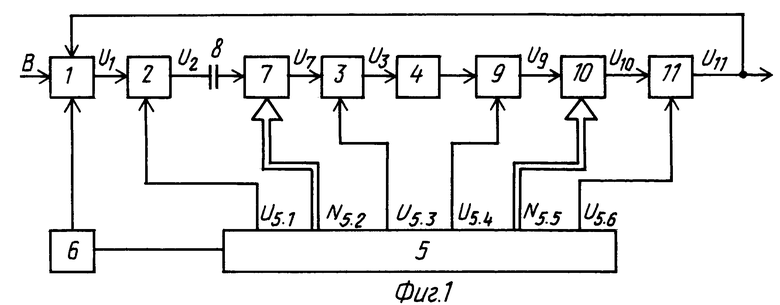
Устройство для измерения магнитных полей, содержащее последовательно соединенные феррозонд и первый интегрирующий дискретизатор, второй интегрирующий дискретизатор, усилитель, устройство управления и генератор, первый выход которого соединен с обмоткой возбуждения феррозонда, а второй выход - с входом устройства управления, первый и третий выходы которого соединены с входами управления соответственно первого и второго интегрирующих дискретизаторов, отличающееся тем, что в него дополнительно введены первый масштабный преобразователь, вход которого через конденсатор соединен с выходом первого интегрирующего дискретизатора, а выход - с входом второго интегрирующего дискретизатора, выход которого соединен с входом усилителя, выполненного по схеме усилителя переменного напряжения, выход которого соединен с входом цепи, содержащей последовательно соединенные фазочувствительный демодулятор, второй масштабный преобразователь и третий интегрирующий дискретизатор, выход которого соединен с компенсационной обмоткой феррозонда, причем входы управления первого масштабного преобразователя соединены с вторыми выходами устройства управления, четвертый, пятый и шестой выходы которого соединены с входами управления соответственно фазочувствительного демодулятора, второго масштабного преобразователя и третьего интегрирующего дискретизатора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Семенов Н.М., Яковлев Н.И | |||
| Цифровые феррозондовые магнитометра | |||
| - Л.: Энергия, 1978, с.30, 137, 140 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 721783, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
