Изобретение относится к области магнитоизмерительной техники, в частности к магнитной навигации и навигационному оборудованию, магниторазведке, магнитному картографированию и т.д., и предназначено для совместного построения прецизионных магнитометров с компенсаторами магнитных помех объекта или магнитных навигационных компасов с компенсаторами магнитной девиации.
В бортовой магнитоизмерительной технике проблемой повышения точности измерения параметров магнитного поля Земли (МПЗ) на борту подвижного объекта является необходимость устранения влияния собственных магнитных помех объекта на магнитометр.
Известны магнитометры [1], содержащие феррозондовый датчик магнитного поля, усилительно-преобразовательный блок и компенсатор магнитных (девиационных) помех. Размещение компенсатора помех осуществляется, как правило, отдельно, или в электронной части магнитометра. Построение и применение аналогового компенсатора помех в составе магнитометра обеспечивает автономность последнего.
Компенсатор в составе трехкомпонентного магнитометра основан на реализации формирования компенсационных поправок, определяемых зависимостью, согласно выражениям Пуассона, учитывающими влияние мягкого и твердого в магнитном отношении железа. Параметры Пуассона, характеризующие помехи, можно считать постоянными величинами для конкретного фиксированного распределения ферромагнитных масс.
Известны магнитометры [2], содержащие трехкомпонентный феррозондовый датчик магнитного поля с жестко ориентированными осями, усилительно-преобразовательный блок и компенсатор магнитных помех, построенный на основе применения аналоговых сумматоров, магнитных преобразователей, реализованных на усилителях, регулировочных масштабных резистивных делителях напряжений и коммутаторов. В основу работы подобных компенсаторов положен принцип подачи компенсационных поправок в выходные цепи измерительных каналов магнитометра или принцип формирования компенсационных магнитных полей, например, с помощью специальных электромагнитных катушек.
Известен трехкомпонентный магнитометр, лишенный указанных недостатков [3], содержащий три ортогонально ориентированных феррозонда, оси чувствительности которых совмещены с соответствующими осями объекта, три усилительно-преобразовательных блока, подключенные выходами через сопротивления обратной связи к компенсационным обмоткам, а входами-к выходам измерительных обмоток соответствующих феррозондов, и подключенный к выходам усилительно-преобразовательных блоков компенсатор помех, причем измерительная и компенсационная обмотки каждого феррозонда соединены дифференциально по постоянному току и подключены к выходам соответствующих феррозондам масштабных блоков компенсатора помех.
Работа устройства осуществляется следующим образом.
Феррозондами измеряются сигналы, соответствующие проекциям вектора индукции магнитного поля на связанные оси объекта. Выходные полезные сигналы феррозондов с выходов измерительных обмоток усиливаются и выделяются в виде напряжений постоянного тока с помощью соответствующих феррозондам усилительно-преобразовательных блоков и затем через соответствующие им сопротивления обратной связи, преобразуясь в ток, подаются на входы компенсационных обмоток соответствующих феррозондов. То есть, в объеме каждого феррозонда осуществляется автоматическая компенсация измеряемого поля током компенсационной обмотки. Таким образом, в данном устройстве измерение проекций вектора индукции магнитного поля осуществляется ферромодуляционными преобразователями автокомпенсационного типа [4, 5]. В магнитометре осуществляется компенсация помех подачей на входы феррозондов компенсационных токов, формируемых компенсатором магнитных помех. Коэффициенты Пуассона являются знакопеременными величинами, поэтому необходимо формирование модулей и знаков компенсационных поправок. Формирование модулей осуществляется масштабными цепями каждого масштабного блока, а формирование знака-подачей тока масштабной цепи масштабного блока в одну из соответствующих знаку дифференциально включенных обмоток феррозондов. В обмотках феррозондов осуществляется алгебраическое суммирование всех компенсационных поправок соответствующего феррозонда.
Известны трехкомпонентные магнитометры [4], содержащие однообмоточные феррозонды, в которых в процессе измерения формирование измеряемого и компенсирующего сигналов осуществляется в одной общей обмотке, то есть выполняющей роль измерительной и компенсационной обмоток. Подобные феррозонды применяются для целей миниатюризации магнитометров. Отсутствие компенсационных обмоток в феррозондах усложняет возможность реализации известной вышеуказанной схемы компенсации помех [3] в этих магнитометрах. С другой стороны, в случае применения других известных схем компенсаторов помех в однообмоточных магнитометрах, исключается возможность их миниатюризации, что является их существенным недостатком.
Наиболее близким по технической сущности к предлагаемому и принятым за прототип является навигационный трехкомпонентный феррозондовый магнитометр [4], содержащий три ортогонально ориентированных феррозонда, оси чувствительности которых совмещены с соответствующими осями объекта, три усилительно-преобразовательных блока, подключенные выходами через сопротивления обратной связи и входами к выходам измерительных обмоток соответствующих феррозондов, причем каждый усилительно-преобразовательный блок содержит последовательно соединенные частотно-избирательный усилитель, фазочувствительный детектор и дифференциальный интегратор, первый и второй входы которого подключены соответственно к первому и второму выходам фазочувствительного детектора, а выход является выходом усилительно-преобразовательного блока и магнитометра.
Работа устройства осуществляется следующим образом.
Феррозондами измеряются сигналы, соответствующие проекциям вектора индукции магнитного поля на связанные оси объекта. Выходные полезные сигналы феррозондов, пропорциональные амплитудам напряжения второй гармоники частоты возбуждения феррозондов выделяются из смеси полезного сигнала и помех, и усиливаются частотно-избирательным усилителем, а затем подаются на входы синхронных фазочувствительных двухполупериодных детекторов. С помощью детекторов осуществляется двухполупериодное фазочувствительное выпрямление синусоидальных импульсов напряжения второй гармоники частоты возбуждения феррозондов. В данном случае выпрямление осуществляется подачей импульсов противоположной полярности на первый и второй выходы детектора (с помощью внутреннего переключателя), соответствующие 0 - и π-фазе прямоугольных импульсов управляющего напряжения коммутации, подаваемого с выхода генератора возбуждения феррозондов на вход управления детекторов. Далее, в процессе суммирования выходных импульсов детектора, подаваемых на прямой и инверсный входы дифференциального интегратора, в последнем осуществляется окончательный процесс формирования напряжения постоянного тока. Выходные напряжения дифференциальных интеграторов через соответствующие им сопротивления обратной связи, преобразуясь в ток, подаются на входы измерительных обмоток соответствующих феррозондов. То есть в объеме каждого феррозонда осуществляется автоматическая компенсация измеряемого поля током обратной связи измерительной обмотки. Таким образом, в данном устройстве измерение проекций вектора индукции МПЗ осуществляется ферромодуляционными преобразователями автокомпенсационного типа с однообмоточными феррозондами.
Достоинством схемы прототипа является простота изготовления феррозонда, содержащего одну общую обмотку, выполняющую роль измерительной и компенсационной обмоток. Подобная, широко применяемая схема феррозонда обеспечивает возможность миниатюризации его конструкции, а, следовательно, и конструкции магнитометра в целом. Эта проблема особенно актуальна при изготовлении феррозондов с замкнутым сердечником. Другим немаловажным положительным качеством однообмоточного феррозонда по сравнению с двухобмоточным, является возможность увеличения количества витков выходной (измерительной) обмотки за счет исключения витков компенсационной обмотки при одном и том же магнитном сердечнике, что в данном случае увеличивает коэффициент преобразования однообмоточного феррозонда, повышая тем самым точность магнитометра.
Недостатком известного устройства является отсутствие схем компенсатора помех в подобной структуре магнитометра, удовлетворяющих требованиям микроминиатюризации. Попытка построения компенсатора известными средствами в данном случае требует заметного усложнения схемы вызванного необходимостью и сложностью формирования знакопеременных компенсационных поправок, обусловленных знакопеременным характером помех.
Техническим результатом, достигаемым при использовании предлагаемого технического решения является подавление помех объекта и миниатюризация схемы магнитометра при совместном исполнении и расположении его электронно-преобразовательной части и компенсатора девиационных помех объекта.
Указанный результат достигается тем, что предлагаемый навигационный трехкомпонентный феррозондовый магнитометр, содержащий три ортогонально ориентированных однообмоточных феррозонда, оси чувствительности которых ориентированы соответственно вдоль продольной, нормальной и поперечной связанных осей объекта, три усилительно-преобразовательных блока, подключенные выходами через сопротивления обратной связи и входами к выходам измерительных обмоток соответствующих феррозондов, причем каждый усилительно-преобразовательный блок содержит последовательно соединенные частотно-избирательный усилитель, фазочувствительный детектор и дифференциальный интегратор, первый и второй входы которого подключены соответственно к первому и второму выходам фазочувствительного детектора, а его выход является выходом усилительно-преобразовательного блока и магнитометра, отличается тем, что в него дополнительно введен компенсатор помех, содержащий три масштабных блока, первый, второй и третий входы которых подключены соответственно к первому, второму и третьему входам компенсатора помех и соответственно к первому, второму и третьему выходам магнитометра, а четвертый вход каждого масштабного блока подключен к выходу источника стабилизированного напряжения, каждый с первого по третий масштабный блок содержит с первого по четвертый мостовые преобразователи напряжения, диагональный вход каждого из которых подключен соответственно к первому по четвертый входам масштабных блоков, причем первая цепь диагональных входов каждого мостового преобразователя содержит последовательное соединение двух сопротивлений, а другая параллельная цепь-сопротивление потенциометра, подвижный контакт которого, являющийся первым выводом диагонального выхода, через первое сопротивление подключен к первому нагрузочному сопротивлению масштабного блока и первому входу операционного усилителя, а второй вывод диагонального выхода, через второе сопротивление подключен к второму нагрузочному сопротивлению масштабного блока и второму входу операционного усилителя соответствующего с первого по третий усилительно-преобразовательных блоков.
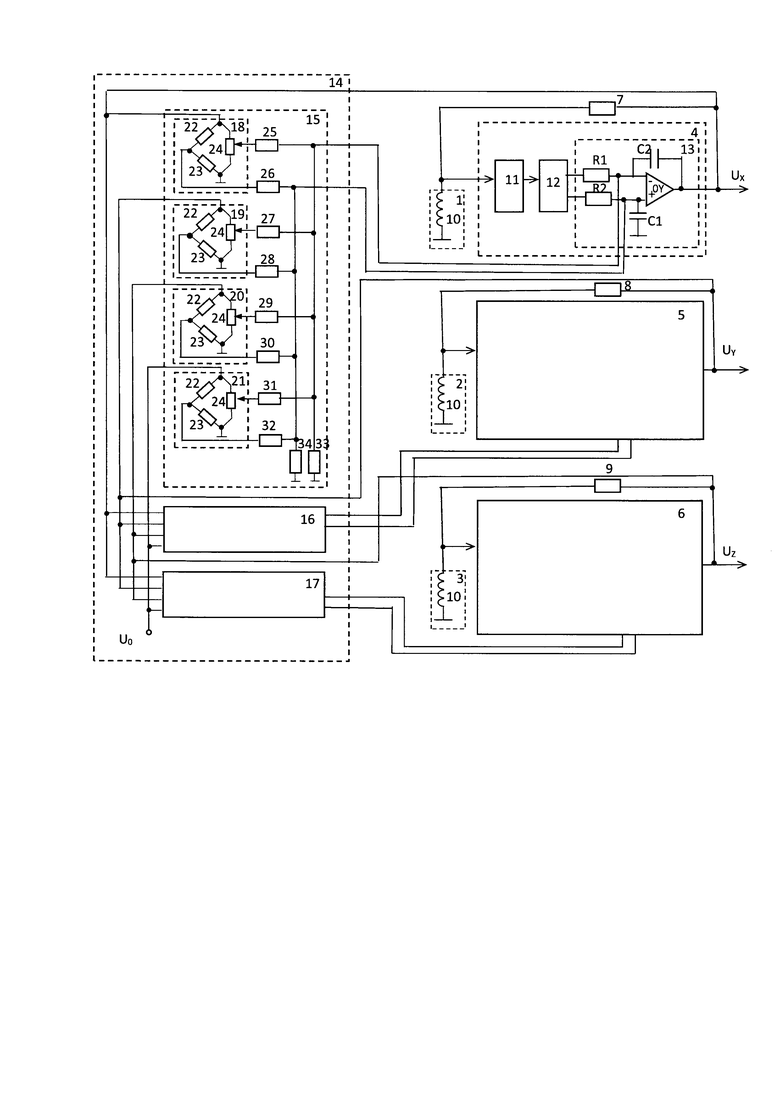
Сущность предлагаемого изобретения поясняется графическим материалом. На фигуре изображена предлагаемая структурная схема навигационного трехкомпонентного феррозондового магнитометра.
Предлагаемый навигационный трехкомпонентный феррозондовый магнитометр (см. фигуру) содержит три ортогонально ориентированных однообмоточных феррозонда 1, 2, 3, оси чувствительности которых ориентированы соответственно вдоль продольной (X), нормальной (Y) и поперечной (Z) связанных осей объекта, три усилительно-преобразовательных блока 4, 5, 6, подключенные выходами через сопротивления обратной связи 7, 8, 9 и входами к выходам измерительных обмоток 10 соответствующих феррозондов 1, 2, 3, причем каждый усилительно-преобразовательный блок 4, 5, 6 содержит последовательно соединенные частотно-избирательный усилитель 11, фазочувствительный детектор 12 и дифференциальный интегратор 13, первый и второй входы которого подключены соответственно к первому и второму выходам фазочувствительного детектора 12, а его выход является выходом усилительно-преобразовательного блока 4, 5, 6 и магнитометра, дополнительно введен компенсатор помех 14, содержащий три масштабных блока 15, 16, 17, первый, второй и третий входы которых подключены соответственно к первому, второму и третьему входу компенсатора помех 14 и соответственно к первому, второму и третьему выходам магнитометра, а четвертый вход каждого масштабного блока 15, 16, 17 подключен к выходу источника стабилизированного напряжения Uo, каждый масштабный блок 15, 16, 17 содержит с первого по четвертый мостовые преобразователи напряжения, диагональный вход каждого из которых подключен соответственно к первому по четвертый входам масштабных блоков 15, 16, 17, причем первая цепь диагональных входов каждого мостового преобразователя напряжения 18-21 содержит последовательное соединение двух сопротивлений 22, 23, а другая параллельная цепь-сопротивление потенциометра 24, подвижный контакт которого, являющийся первым выводом диагонального выхода, через первое сопротивление 25, 27, 29, 31 подключен к первому нагрузочному сопротивлению 33 масштабного блока 15, 16, 17 и первому входу операционного усилителя (ОУ), а второй вывод диагонального выхода через второе сопротивление 26, 28, 30, 32 подключен к второму нагрузочному сопротивлению 34 масштабного блока 15, 16, 17 и второму входу операционного усилителя (ОУ) дифференциального интегратора 13 соответствующего с первого по третий усилительно-преобразовательных блоков 4, 5, 6.
Работа устройства осуществляется следующим образом.
Феррозондами 1, 2, 3 измеряются сигналы, соответствующие проекциям вектора индукции магнитного поля на связанные оси X, Y, Z объекта. Выходные полезные сигналы феррозондов 1, 2, 3 с выходов измерительных обмоток 10 выделяются частотно-избирательным усилителем 11, усиливаются по переменному току, а затем подаются на входы синхронных фазочувствительных двухполупериодных детекторов 12. С помощью детекторов 12 осуществляется двухполупериодное фазочувствительное выпрямление синусоидальных импульсов напряжения второй гармоники частоты возбуждения феррозондов. В данном случае выпрямление (детектирование) осуществляется подачей импульсов противоположной полярности (противоположной фазы) на первый и второй выходы детектора с помощью внутреннего переключателя, соответствующие 0- и π - фазе прямоугольных импульсов управляющего напряжения коммутации, подаваемого с выхода генератора возбуждения феррозондов 1, 2, 3, на вход управления детекторов 12. Далее в процессе суммирования выходных импульсов детектора 12, подаваемых на прямой и инверсный входы дифференциального интегратора 13, в последнем осуществляется окончательный процесс формирования напряжения постоянного тока. Выходные напряжения дифференциальных интеграторов 13 через соответствующие им сопротивления обратной связи 7, 8, 9 преобразуясь в ток, подаются на входы измерительных обмоток 10 соответствующих феррозондов 1, 2, 3. То есть в процессе интегрирования напряжения в каждом дифференциальном интеграторе 13, в объеме каждого феррозонда 1, 2, 3 осуществляется автоматическое уравновешивание измеряемой индукции магнитного поля полем, формируемым током измерительной обмотки 10. В данном случае одна общая измерительная обмотка выполняет собственную роль измерения, обеспечивая формирование четногармонического полезного сигнала, также и роль компенсационной обмотки, обеспечивая алгебраическое суммирование измеряемого и компенсационного магнитных полей. Таким образом, в данном устройстве измерение проекций вектора индукции магнитного поля осуществляется ферромодуляционными преобразователями автокомпенсационного типа [4, 5].
Влияние помех на результаты измерения компонент вектора магнитной индукции по соответствующим осям объекта X, Y, Z определяется выражениями

где Вх, Вy, Bz - составляющие вектора суммарной индукции МПЗ и объекта;
Вхи, Вyи, В2и - измеряемые составляющие вектора индукции МПЗ (при отсутствии помех); ΔВх, ΔВy, ΔBz - составляющие вектора магнитной индукции помехи, определяемые следующими выражениями Пуассона [2, 3]
где а, b, с, d, e, f, g, h, k, - коэффициенты Пуассона, характеризующие влияние магнитомягкого, в магнитном отношении, железа; Р, Q, R - составляющие магнитной индукции по осям объекта, вызванной постоянной намагниченностью, то есть компоненты вектора магнитной индукции от намагничивания твердого железа объекта.
В предлагаемом магнитометре осуществляется компенсация помех подачей на входы дифференциальных интеграторов 13 усилительно-преобразовательных блоков 4, 5, 6 компенсационных сигналов, формируемых компенсатором помех 14. Для определения структуры компенсатора помех 14 представим выражения помех (2) приведенными к выходам магнитометра умножением левой и правой частей выражения (2) на коэффициент преобразования К автокомпенсационного преобразователя

где Uiи (i = x, y, z), ΔUi и UP, UQ, UR - приведенные к выходам магнитометра соответственно напряжения измеряемых величин, суммарных помех индуктивного и постоянного намагничивания.
Структуру компенсатора помех 14 определим выражениями компенсационных сигналов, приведенных к выходам магнитометра
где m - коэффициенты преобразования напряжений, определяемые значениями коэффициентов Пуассона; D - коэффициент преобразования результатов суммирования компенсационных сигналов на выходы X, Y, Z магнитометра, равных напряжениям на диагональных выходах мостовых преобразователей напряжения. Напряжения слагаемых выражений (4) в скобках для ΔUхк, ΔUyк, и ΔUzк формируются с первого 18 по четвертый 21 мостовыми преобразователями напряжения соответствующих масштабных блоков 15, 16, 17. Опуская индексы при коэффициентах m и учитывая равенство сопротивлений 22, 23, то есть R22=R23=R и R24=2R определим в общем случае выходное диагональное напряжение Δi каждого мостового преобразователя в виде разности напряжений на подвижном контакте сопротивления 24 и точкой соединения сопротивлений 22, 23 следующим полученным выражением

то есть

где ΔR - изменение сопротивлений между крайними выводами сопротивления 24, и его подвижным контактом, определяемое перемещением подвижного контакта относительно среднего положения при котором ΔR=0. Знак формируемого коэффициента m также определяется положением подвижного контакта относительно его среднего положения.
В предлагаемом магнитометре формирование алгебраических сумм слагаемых Δi осуществляется суммирующим устройством на основе дифференциального интегратора 13 усилительно-преобразовательных блоков 4, 5, 6 совместно с сопротивлениями 25-32 (R25-R32) и нагрузочными сопротивлениями 33, 34 соответствующих масштабных блоков 15, 16, 17, являющимся многовходовым интегратором [6, с. 60], позволяющим получать алгебраическую сумму интегралов нескольких входных напряжений. При С1=С2 в схеме многовходового интегратора необходимо обеспечить равенство активных проводимостей внешних цепей, присоединенных к инвертирующему и не инвертирующему входам операционного усилителя ОУ. Это уравнивание обеспечивается выбором нагрузочных сопротивлений 33, 34 согласно [6, с. 61]. В данном случае при выполнении равенств С1=С2, R1=R2=R25=R26=R27=R28=R29=R30=R31=R32 можно исключить сопротивления 33, 34.
Компенсация помех в магнитометре осуществляется формированием компенсационных сигналов в виде напряжений подаваемых с выходов мостовых преобразователей напряжения на дифференциальные входы многовходового интегратора. Компенсационными сигналами являются регулируемые напряжения диагональных выходов мостовых преобразователей напряжения 18-21 масштабных блоков 15, 16, 17. Учитывая подобие выражений (3), (4) и условие компенсации помех из (1), то есть

При Ux=Uхи, Uy=Uyи, Uz=Uzи в режиме полной компенсации, имеем
Таким образом, согласно (5) и (6) коэффициенты m являясь знакопеременными, регулируемыми, пропорционально зависимыми от коэффициентов Пуассона величинами, в достаточной степени обеспечивают формирование знакопеременных компенсационных поправок.
Относительная простота и возможность построения схемы компенсатора девиационных помех в магнитометрах с однообмоточными феррозондами, обусловленные отсутствием необходимости использования дополнительных активных элементов, дополнительных обмоток феррозондов или индуктивных катушек повышают помехоустойчивость и позволяют осуществление миниатюризации предлагаемого магнитометра.
Следовательно, предлагаемое устройство, обладая новизной, полезностью и реализуемостью, обеспечивает возможность повышения точности измерения компонент вектора индукции МПЗ на подвижном объекте.
Литература
1. Скородумов С.А., Обоишев Ю.П. Помехоустойчивая измерительная аппаратура. - Л. Энергоиздат. Ленингр. отд.-ние, 1981.
2. Л.А. Кардашинский-Брауде. Современные судовые магнитные компасы. - СПб: ФГУП "ГНЦ-ЦНИИ «Электроприбор»", 1999.
3. Навигационный магнитометр (варианты). Патент РФ №2352954, МПК G01R 33/02, 27.02.2007.
4. Афанасьев Ю.В. Феррозондовые приборы. - Л.: Энергоатомиздат. Ленингр. отд.-ние, 1986.
5. Семенов Н.М., Яковлев Н.И. Цифровые феррозондовые магнитометры. Л.: Энергия, 1978.
6. Гутников B.C. Применение операционных усилителей в измерительной технике. Л., "Энергия", 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1994 |
|
RU2085962C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2015 |
|
RU2610938C1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1998 |
|
RU2153682C1 |
| ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР | 1991 |
|
RU2019860C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| ЦИФРОВОЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2006 |
|
RU2316781C1 |
Изобретение относится к области магнитоизмерительной техники. Навигационный трехкомпонентный феррозондовый магнитометр дополнительно содержит компенсатор помех, содержащий три масштабных блока, первый, второй и третий входы которых подключены соответственно к первому, второму и третьему входам компенсатора помех и соответственно к первому, второму и третьему выходам магнитометра, а четвертый вход каждого масштабного блока подключен к выходу источника стабилизированного напряжения, каждый с первого по третий масштабный блок содержит с первого по четвертый мостовые преобразователи напряжения, диагональный вход каждого из которых подключен соответственно к первому по четвертый входам масштабных блоков, причем первая цепь диагональных входов каждого мостового преобразователя содержит последовательное соединение двух сопротивлений, а другая параллельная цепь - сопротивление потенциометра, подвижный контакт которого, являющийся первым выводом диагонального выхода, через первое сопротивление подключен к первому нагрузочному сопротивлению масштабного блока и первому входу операционного усилителя, а второй вывод диагонального выхода через второе сопротивление подключен к второму нагрузочному сопротивлению масштабного блока и второму входу операционного усилителя соответствующего с первого по третий усилительно-преобразовательных блоков. Технический результат – подавление помех объекта и миниатюризация схемы навигационного трехкомпонентного феррозондового магнитометра с однообмоточными феррозондами при обеспечении его высокой точности измерения и совместного исполнения и размещения его электронно-преобразовательной части и компенсатора девиационных помех. 1 ил.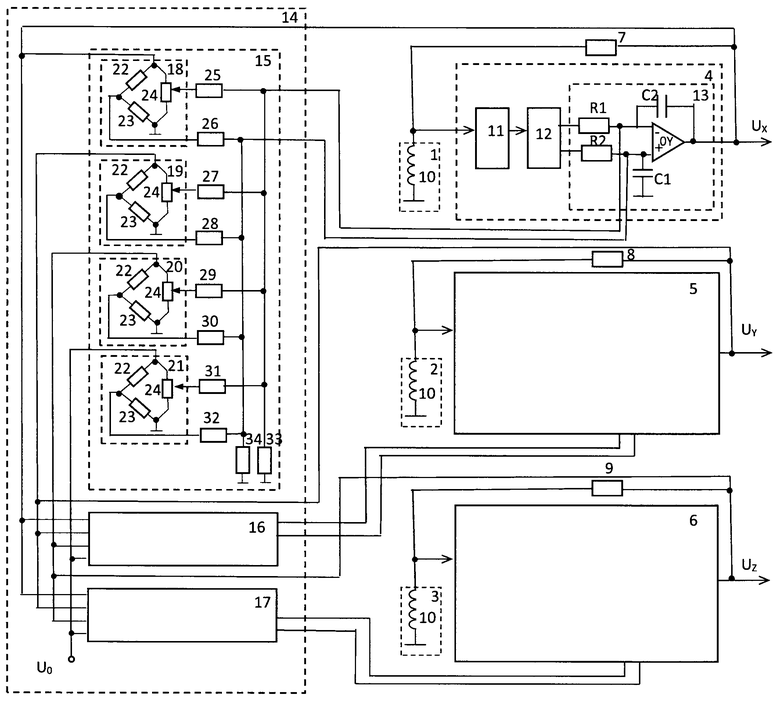
Навигационный трехкомпонентный феррозондовый магнитометр, содержащий три ортогонально ориентированных однообмоточных феррозонда, оси чувствительности которых ориентированы соответственно вдоль продольной, нормальной и поперечной связанных осей объекта, три усилительно-преобразовательных блока, подключенные выходами через сопротивления обратной связи и входами к выходам измерительных обмоток соответствующих феррозондов, причем каждый усилительно-преобразовательный блок содержит последовательно соединенные частотно-избирательный усилитель, фазочувствительный детектор и дифференциальный интегратор, первый и второй входы которого подключены соответственно к первому и второму выходам фазочувствительного детектора, а его выход является выходом усилительно-преобразовательного блока и магнитометра, отличающийся тем, что в него дополнительно введен компенсатор помех, содержащий три масштабных блока, первый, второй и третий входы которых подключены соответственно к первому, второму и третьему входам компенсатора помех и соответственно к первому, второму и третьему выходам магнитометра, а четвертый вход каждого масштабного блока подключен к выходу источника стабилизированного напряжения, каждый с первого по третий масштабный блок содержит с первого по четвертый мостовые преобразователи напряжения, диагональный вход каждого из которых подключен соответственно к первому по четвертый входам масштабных блоков, причем первая цепь диагональных входов каждого мостового преобразователя содержит последовательное соединение двух сопротивлений, а другая параллельная цепь - сопротивление потенциометра, подвижный контакт которого, являющийся первым выводом диагонального выхода, через первое сопротивление подключен к первому нагрузочному сопротивлению масштабного блока и первому входу операционного усилителя, а второй вывод диагонального выхода через второе сопротивление подключен к второму нагрузочному сопротивлению масштабного блока и второму входу операционного усилителя соответствующего с первого по третий усилительно-преобразовательных блоков.
| Трехкомпонентный феррозондовый магнитометр | 1978 |
|
SU789938A1 |
| Трехкомпонентный феррозондовый магнитометр | 1983 |
|
SU1191850A1 |
| Скважинный трехкомпонентный феррозондовый магнитометр | 1985 |
|
SU1310765A1 |
| WO 2014059110 A1, 17.04.2014. | |||

