Изобретение относится к измерительной технике и может быть использовано для измерения временной задержки в динамических системах, имеющих взаимно однозначные нелинейности, а также других характеристик и параметров нелинейных систем, выражаемых через временные задержки (скорость движения, расход жидкости и т.п.).
При определении скорости движения, частоты вращения различных тел и других параметров в случае, когда непосредственный контакт с движущимися поверхностями невозможен (например, в случае определения скорости перемещения движущегося тела, частоты нагретых и негладких поверхностей и т.д.) широкое распространение получил корреляционный метод, основанный на определении временного сдвига двух сигналов, получаемых от двух точек движущейся поверхности. Однако, все существующие измерители временной задержки сигналов в динамических системах ("Корреляционные измерительные устройства в автоматике", Березин С.Я., Каратаев О.Г., Энергия, 1976; "Цифровые измерительные системы корреляционного типа", Мелик-Шахназаров А.М., Маркатун М.Г., Энергоатмиздат, 1985) предполагают линейность этих систем и не могут быть использованы в тех случаях, когда система нелинейна.
Известно устройство, содержащее два согласующих блока преобразования сигналов, состоящих из двух первичных измерительных преобразователей (в качестве них выступают эхолоты), которые воспринимают переменные случайные сигналы, поступающие от исследуемого объекта (в качестве него взято движение судна относительно грунта) и двух усилителей, с помощью которых случайные сигналы усиливаются и поступают на коррелятор, позволяющее получить оценку временной задержки и описанное в книге "Корреляционные измерительные устройства в автоматике", Березин С.Я., Каратаев О.Г., Энергия, 1976, стр. 8-10. В данном устройстве временная задержка пропорциональна скорости движения судна относительно грунта, что позволяет использовать его для измерения скорости движения судна.
Однако указанное устройство не позволяет получить оценку временной задержки двух случайных сигналов, имеющих нелинейную статистическую связь. Кроме того, оно не учитывает влияния нелинейности блоков измерительных средств (первичные измерительные преобразователи, усилители и т.п.).
Кроме этого, известно устройство, описанное в книге "Цифровые измерительные системы корреляционного типа", Мелик-Шахназаров А.М., Маркатун М.Г., Энергоатомиздат, 1985, стр. 10-14, являющееся прототипом предлагаемого изобретения и содержащее два согласующих блока преобразования сигналов, состоящих из двух первичных измерительных преобразователей (двух формирователей узких световых полос и двух воспринимающих свет фотоэлементов) и двух усилителей, с которых сигналы последовательно поступают на коррелометр, экстремальный регулятор (два последних блока объединены в корреляционный измеритель транспортного запаздывания, выход которого является выходом измерителя временной задержки) и вычислительный блок. В качестве объекта исследования взята лента проката. В данном устройстве временная задержка пропорциональна скорости движения ленты, что позволяет использовать его для измерения скорости ее движения.
Однако указанное устройство, как и предыдущее, применимо лишь в тех случаях, когда связь сигналов линейна, а более общий случай предполагает нелинейную взаимно однозначную функциональную или статистическую связь сигналов.
Задачей предлагаемого изобретения является создание измерителя временной задержки сигналов с расширенными возможностями за счет измерения временной задержки сигналов в нелинейных системах.
Поставленная задача достигается тем, что в известное устройство, содержащее два согласующих блока преобразования сигналов, входы которых являются входами измерителя, последовательно соединенные коррелометр, экстремальный регулятор, выход которого является выходом измерителя временной задержки, и вычислительный блок, введены два измерителя одновременных функций распределения, два управляемых функциональных преобразователя и два переключателя (на два положения каждый), выходы которых подключены к входам коррелометра, первые вход первого и второго переключателей соединены соответственно с входами измерителей одномерных функций распределения, с информационными входами управляемых функциональных преобразователей и с выходами блоков преобразования сигналов первого и второго каналов (всего устройства-измерителя), а вторые входы переключателей - с выходами управляемых функциональных преобразователей, управляющие входы которых соединены с выходами соответствующих измерителей одномерных функций распределения.
Предлагаемое изобретение удовлетворяет критерию "изобретательский уровень", т.к. оно не следует для специалиста явным образом из известного уровня техники, из которого не выявляется возможность измерения задержки в нелинейных (а также линейных) системах на базе измерителей конкорреляционных функций.
На чертеже приведена функциональная схема предлагаемого устройства.
Поскольку согласно схеме устройство содержит два идентичных канала вплоть до коррелометра, для удобства изложения блоки, относящиеся к одному из каналов (например, к левому, с нечетными номерами) будет называть первыми, а относящиеся ко второму каналу (с четными номерами) - вторыми.
Устройство содержит два согласующих блока преобразования сигналов 1, 2, два измерителя одномерных функций распределения 3, 4, два управляемых функциональных преобразователя 5, 6, два переключателя (на два положения каждый 7, 8, коррелометр 9, экстремальный регулятор 10 и вычислительный блок 11. Входы 12, 13 блоков преобразования сигналов являются информационными входами измерителя. Выход 14 первого блока преобразования сигналов 1 соединен с информационным входом первого управляемого преобразователя 5, с входом. первого измерителя одномерной функции распределения 3 и с контактом первого входа первого переключателя 7. Выход 15 второго блока преобразования сигналов 2 соединен с информационным входом второго управляемого функционального преобразователя 6, с входом второго измерителя одномерной функции распределения 4 и с контактом первого входа второго переключателя 8. Выходы 16, 17 первого и второго измерителей одномерных функций распределения 3, 4 являются выходами устройства по функциям распределения и соединены с управляющими входами соответственно первого и второго управляемых функциональных преобразователей 5, 6. Выходы 18, 19 управляемых функциональных преобразователей 5, 6 соединены соответственно с контактами вторых входов первого и второго переключателей 7, 8. Выходы переключателей 7, 8 подключены к входам коррелометра 9, выход 20 которого является выходом устройства по корреляционным функциям (корреляционным выходом) и соединен с входом экстремального регулятора 10, выход 21 которого является выходом устройства по временной задержке, и соединен с входом вычислительного блока 11, выход которого является выходом устройства по характеристикам, производным от временной задержки.
Согласующие блоки преобразования сигналов 1, 2 включают первичные измерительные преобразователи, которые являются серийными и выбираются в зависимости от вида исследуемого объекта (датчики вибрации, температуры, давления перемещения и т.п.), усилители (в качестве которых могут использоваться любые усилительные блоки, например, приборов Х6-4), при необходимости аналого-цифровые преобразователи (АЦП) (их наличие или отсутствие обусловлено тем, какие серийные средства используются в качестве измерителей функций распределения и коррелометра) и другие серийные узлы, необходимые для согласования сигналов, получаемых от объектов, с входами других блоков 3, 4, 5, 6, 9 измерителя.
В качестве измерителей одномерных функций распределения 3, 4 и коррелометра 9, могут быть использованы серийные приборы, например, типа Х6-2, Х6-4, Х6-6 и их блоки, в качестве вычислительного блока 11 может быть использован выходной блок любого из этих приборов. Экстремальный регулятор 10 описан в книге "Цифровые измерительные системы корреляционного типа", Мелик-Шахназаров А.М., Маркатун М.Г., Энергоатмиздат, 1985, стр. 54-55, а управляемые функциональные преобразователи могут быть реализованы широко известными способами, например, по схемам рис. 3-9 книги Смолова В.Б. "Функциональные преобразователи информации". - Л.: Энергоиздат, 1981, стр. 68.
В статьях Губарева В. В. "Корреляционно-спектральные характеристики, инвариантные к взаимно однозначным безынерционным функциональным преобразованиям случайных процессов" (Автоматика и телемеханика. - 1987, N 5, с. 75-83) и "Характеристики случайных элементов, инвариантные к взаимно однозначным безынерционным функциональным преобразованиям" (Автометрия. - 1984, N 6, с. 29-34) вводятся новые характеристики связи случайных процессов - конкорреляционные, которые характеризуют линейную и нелинейную взаимно однозначные связи и обладают свойством инвариантности к взаимно однозначным безынерционным функциональным преобразованиям сигналов, т.е. в отличие от типичных корреляционных функций, конкорреляционные не деформируются на выходе любого нелинейного элемента (блока), выходная характеристика которого является взаимно однозначной.
Прежде чем рассматривать работу измерителя, приведем необходимые понятия и обозначения. Конкорреляционной и взаимной конкорреляционной функциям случайных процессов X(t) и Y(t) называются функции, определяемые следующим образом:

где
Fx[.] и Fx[.] есть одномерные функции распределения сигналов x(t) и y(t) соответственно;
M{.}| - оператор усреднения по вероятностной мере,
а

Измерение конкорреляционной функции Kxy(t) стационарных случайных сигналов x(t) и y(t) осуществляется в блоке измерения корреляционной функции (коррелометре 9) с использованием вычислительных преобразований по формуле:
где  траектория входных сигналов x(t), y(t),
траектория входных сигналов x(t), y(t),
Δt- шаг дескретизации траекторий;
Δτ=sΔt, s=1,2,...- шаг дискретизации K(τ);
F

а также обычная взаимная корреляционная функция
Возможны 4 сходных режима работы измерителя. В режиме 1 измерение временной задержки производится на основе результатов R блоков 1 и 2 соответственно представляют собой реализации центрированных, стационарных на интервале анализа, эргодических по отношению к оцениваемым характеристикам процессов X(t) и Y(t), усиленные и преобразованные так, чтобы соответствовать требованиям к входным сигналам блоков 3, 4, 5, 6, 9. Сигналы
блоков 1 и 2 соответственно представляют собой реализации центрированных, стационарных на интервале анализа, эргодических по отношению к оцениваемым характеристикам процессов X(t) и Y(t), усиленные и преобразованные так, чтобы соответствовать требованиям к входным сигналам блоков 3, 4, 5, 6, 9. Сигналы  поступают на входы 14, 15 измерителей одномерных функций распределения 3, 4 и управляемых функциональных преобразователей 5, 6 соответственно. Как правило, x(t) и y(t) являются сигналами, получаемыми от исследуемого объекта, причем в идеальном случае y(t)=f[x(t+τ3)], где f (•) некоторая взаимно однозначная функция, т. е. y(t) отстает от x(t) на величину временной задержки τ3 и связан с x(t+τ3) через взаимно однозначное функциональное преобразование f (•). Например, если измеритель используется для измерения скорости v проката стали по формуле V=L/τ3, где τ3 - временная задержка прохождения сталью расстояния L между датчиками, то x(t) и y(t) характеризуют температуру одного и того же проката стали прокатного стана и получаются на выходе температурных датчиков, отстоящих друг от друга на некоторое расстояние L вдоль транспортера. Другой пример, y(t) - выходной сигнал некоторой нелинейной системы, осуществляющей преобразование f[x(t)] . В более сложном случае допускается наличие инерционности в исследуемой системе. В этом случае измеритель будет выдавать значение τ3 характеризующее некоторое "эквивалентное" запаздывание в инерционной (динамической) линейной или нелинейной системе при условии, что все нелинейности безынерционные с взаимно однозначными выходными характеристиками.
поступают на входы 14, 15 измерителей одномерных функций распределения 3, 4 и управляемых функциональных преобразователей 5, 6 соответственно. Как правило, x(t) и y(t) являются сигналами, получаемыми от исследуемого объекта, причем в идеальном случае y(t)=f[x(t+τ3)], где f (•) некоторая взаимно однозначная функция, т. е. y(t) отстает от x(t) на величину временной задержки τ3 и связан с x(t+τ3) через взаимно однозначное функциональное преобразование f (•). Например, если измеритель используется для измерения скорости v проката стали по формуле V=L/τ3, где τ3 - временная задержка прохождения сталью расстояния L между датчиками, то x(t) и y(t) характеризуют температуру одного и того же проката стали прокатного стана и получаются на выходе температурных датчиков, отстоящих друг от друга на некоторое расстояние L вдоль транспортера. Другой пример, y(t) - выходной сигнал некоторой нелинейной системы, осуществляющей преобразование f[x(t)] . В более сложном случае допускается наличие инерционности в исследуемой системе. В этом случае измеритель будет выдавать значение τ3 характеризующее некоторое "эквивалентное" запаздывание в инерционной (динамической) линейной или нелинейной системе при условии, что все нелинейности безынерционные с взаимно однозначными выходными характеристиками.
В зависимости от используемых средств измерение τ3 может осуществляться в разных режимах, в частности, τ3 может получаться по ходу измерения корреляционной или конкорреляционной функции или после их измерения, а управление работой может быть ручным, полуавтоматическим или автоматическим. Приведем одну из возможных временных диаграмм работы измерителя в полуавтоматическом режиме измерения конкорреляционных функций в положении переключателей 7, 8, указанном на чертеже.
Этап 1. (Временной интервал (0, t1]): измерение функций распределения. После включения измерителя, подачи от объекта сигналов x(t) и y(t) и запуска измерителя происходит измерение в течение отрезка времени (0,t1) длиной T1= t1 одномерных функций распределения Fx(x) и Fy(y). При этом в каждый текущий момент времени в блоках 1, 2 происходит преобразование отсчетом сигналов x(t), y(t) в отсчеты  поступающие на вход измерителей одномерных функций распределения 3, 4. Например, если входные сигналы электрические, изменяющиеся в диапазоне ± 0,1 В, а входная шкала измерителей 3, 4 составляет ± 5 В, то в блоках 1, 2 производится усиление сигналов в 50 раз, то есть
поступающие на вход измерителей одномерных функций распределения 3, 4. Например, если входные сигналы электрические, изменяющиеся в диапазоне ± 0,1 В, а входная шкала измерителей 3, 4 составляет ± 5 В, то в блоках 1, 2 производится усиление сигналов в 50 раз, то есть  а блоки 1, 2 - усилители.
а блоки 1, 2 - усилители.
Этап 2. (Временной интервал t1, t2]): настройка управляемых функциональных преобразователей 5, 6.
В течение этого этапа вручную (или автоматически) производится установка выходной характеристики преобразователей 5, 6, то есть, говоря языком математики, устанавливается функциональное соответствие между выходными  и входными
и входными  значениями сигналов блоков 5 и 6. Для этого полученные на первом этапе результаты Fx*(x) и Fy*(y) измерения функций распределения Fx(x) и Fy(y) используются как управляющие. Например, в преобразователях 5, 6, построенных по схеме рис. 3-9 книги Смолова В. Б. "Функциональные преобразователи информации" (Д.: Энергоиздат, 1981, стр. 68), двоичный код, соответствующий Fx*(x) и Fy*(y), определяет положение ключей Кл1, ...,Клm-1, а сигналы
значениями сигналов блоков 5 и 6. Для этого полученные на первом этапе результаты Fx*(x) и Fy*(y) измерения функций распределения Fx(x) и Fy(y) используются как управляющие. Например, в преобразователях 5, 6, построенных по схеме рис. 3-9 книги Смолова В. Б. "Функциональные преобразователи информации" (Д.: Энергоиздат, 1981, стр. 68), двоичный код, соответствующий Fx*(x) и Fy*(y), определяет положение ключей Кл1, ...,Клm-1, а сигналы  подаются на вход "x" схемы рис. 3.9 из цитируемой книги. В этом случае управляющие сигналы Fx*(x) и Fy*(y) с выходов 16, 17 заявляемого измерителя однозначно определяют положение ключей Кл1,...,Клm-1 преобразователей 5, 6, построенных по схеме рис. 3-9 из книги В.Б. Смолова. Теперь при подаче на входы преобразователей 5, 6 сигналов
подаются на вход "x" схемы рис. 3.9 из цитируемой книги. В этом случае управляющие сигналы Fx*(x) и Fy*(y) с выходов 16, 17 заявляемого измерителя однозначно определяют положение ключей Кл1,...,Клm-1 преобразователей 5, 6, построенных по схеме рис. 3-9 из книги В.Б. Смолова. Теперь при подаче на входы преобразователей 5, 6 сигналов  на их выходах будут сигналы Fx*[x(t)] и Fy*[y(t)].
на их выходах будут сигналы Fx*[x(t)] и Fy*[y(t)].
Второй пример. Допустим, что в качестве измерителей 3, 4 функций распределения Fx(x), Fy(y) используются измерители типа Х6.2, Х6.4, Х6.6. В них измерение функций распределения, например Fx(x), осуществляется следующим образом. Весь диапазон значений  заранее (так предусмотрено в приборах) разбивается на n состыкованных друг с другом равных интервалов [x[K], x[K]+Δx], k = 1,2,...,n, шириной Δx, когда x[1] устанавливается на уровне минимально возможного на исследуемом отрезке времени t ∈ [0,t1](t1=NΔt,Δt- шаг дискретизации
заранее (так предусмотрено в приборах) разбивается на n состыкованных друг с другом равных интервалов [x[K], x[K]+Δx], k = 1,2,...,n, шириной Δx, когда x[1] устанавливается на уровне минимально возможного на исследуемом отрезке времени t ∈ [0,t1](t1=NΔt,Δt- шаг дискретизации  по времени) значения
по времени) значения  , а [x[n-1]+Δx]=x[n]- на уровне максимального значения
, а [x[n-1]+Δx]=x[n]- на уровне максимального значения 
Значение Fx*(x) на выходе измерителя 3 по завершении измерений, то есть при t ≥ t1, получается путем реализации в блоке 3 вычислительных преобразований вида
где
I(A) - индуктор события A, то есть I(A)=1, если событие A имело место, и  если событие A не имело место, то есть имело место событие
если событие A не имело место, то есть имело место событие 
Это, как правило, обеспечивается следующим образом. Для каждого текущего отсчета  i= 0,...,N-1, сигнала
i= 0,...,N-1, сигнала  определяется номер k интервала группирования, в который попадает значение
определяется номер k интервала группирования, в который попадает значение  в виде: k есть целая часть отношения
в виде: k есть целая часть отношения  . Согласно (7), в ячейку памяти (или в накопитель, где накапливаются Fx*(x)), измерителя 3 с номером k+1, k+2,...,n направляется сигнал "1", в остальные же ячейки с номерами 1,2,...k-1 посылаются сигналы "0" (или ничего не посылается). По прошествии N тактов в каждой "k"-той ячейке измерителя 3 будет накоплено значение суммы (Σ) из формулы (7), которое после деления на N дает значение Fx*(x).
. Согласно (7), в ячейку памяти (или в накопитель, где накапливаются Fx*(x)), измерителя 3 с номером k+1, k+2,...,n направляется сигнал "1", в остальные же ячейки с номерами 1,2,...k-1 посылаются сигналы "0" (или ничего не посылается). По прошествии N тактов в каждой "k"-той ячейке измерителя 3 будет накоплено значение суммы (Σ) из формулы (7), которое после деления на N дает значение Fx*(x).
Замечание. Если считывание (вывод) измеренного значения Fx*(x) из блока 3 осуществляется в виде пары (k, Fx*(x); x∈[x[k],x[k+1]] то фактически выходной блок измерителя 3 выполняет функции блока 5. Именно этот режим реализован в измерителе по АС N 1462294, БИ N 8, 1989 г.
Однако, чаще всего в измерителях 3 номер "k" не указывается явно, выход Fx*(x) осуществляется в виде последовательной развертки: k=1, потом k=2,... . Тогда преобразование  осуществляется в блоках 5, 6 как и описывается далее.
осуществляется в блоках 5, 6 как и описывается далее.
Теперь рассмотрим как работает управляемый функциональный преобразователь 5 во втором режиме в предположении, что функция распределения Fx*(x) измерена на первом этапе (это условие не обязательно, если измеритель 23 работает в текущем режиме, когда Fx*(x) появляется полностью для всех t≥t1, то есть спустя время переходного процесса в измерителе).
Вариант 1. Сигнал  поступает одновременно на вход 14 блоков 3 и 5. В блоке 3 для текущего отсчета
поступает одновременно на вход 14 блоков 3 и 5. В блоке 3 для текущего отсчета  получается значение k интервала группирования (x[k], x[k]+Δx), в который попало значение
получается значение k интервала группирования (x[k], x[k]+Δx), в который попало значение  и соответствующее ему значение Fx*(x[k]+Δx/2), которое и выдается функциональным преобразователем 5 в виде выходного отсчета
и соответствующее ему значение Fx*(x[k]+Δx/2), которое и выдается функциональным преобразователем 5 в виде выходного отсчета  То есть в этом случае функциональный преобразователь представляет собой ячейку памяти на одно число и преобразователь
То есть в этом случае функциональный преобразователь представляет собой ячейку памяти на одно число и преобразователь  в Fx*(x), когда выходной сигнал преобразователя 5, 6 - это код, число, напряжение,... - в зависимости от вида входного сигнала коррелометра 9 (обычная инженерная задача согласования вход-выход разных измерительных приборов).
в Fx*(x), когда выходной сигнал преобразователя 5, 6 - это код, число, напряжение,... - в зависимости от вида входного сигнала коррелометра 9 (обычная инженерная задача согласования вход-выход разных измерительных приборов).
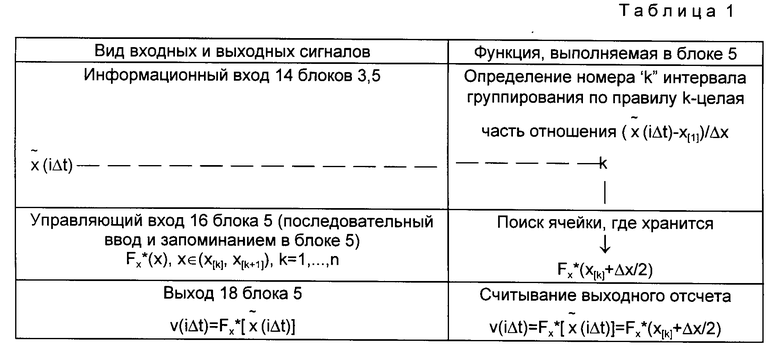
Вариант 2. Измеритель 3 выдает Fx*(x[k]+Δx/2) только последовательно для k= 1, k= 2, k=3,...k=n. Тогда функциональный преобразователь 5 представляет собой часть блока измерителя 3, реализующего определение номера интервала "k", в который попадает  (как описано выше) и табличный преобразователь, реализующий таблицу вида.
(как описано выше) и табличный преобразователь, реализующий таблицу вида.
Реализация подобных функциональных преобразователей широко известна и не требует изобретательских усилий.
Таким образом, управление блоками 5, 6 осуществляется с выходов блоков 3, 4 и сводится к замене средней строки таблицы 1 в зависимости от результатов измерения Fx(x) и Fy(y) в блоках 3, 4. При одновременной подаче сигналов на информационные и управляющие входы блоков 5, 6, спустя переходный процесс в измерителях 3, 4, получаются сигналы v(t), z(t), нужные для нахождения с помощью коррелометра 9 конкорреляционных и полуконкорреляционных функций, то есть тех функций, которые и позволяют измерять задержку в нелинейных системах (см. (3)).
Этап 3. (Временной интервал (t2, t3] ): измерение конкорреляционной функции Kxy(τ).
Теперь, по окончании этапа 2, измеритель готов к измерению конкорреляционной функции Kxy(τ). После подачи на его входы 12, 13 сигналов x(t), y(t) и запуска измерителя (то есть блоков 1, 2, 5, 6, 9) с момента t2 начинается измерение конкорреляционной функции Kxy(τ) коррелометром 9, поскольку входные сигналы x(t) и y(t) через блоки 1, 2 преобразовываются по ходу времени в  (например усиливаются в 50 раз), а в блоках 5, 6 преобразовываются в Fx*[x(t)] , Fy*[y(t))] . В результате чего по истечении времени T2= t3-t2 на выходе коррелометра 9 получается результат Kxy*(τ) измерения конкорреляционной функции Kxy(τ).
(например усиливаются в 50 раз), а в блоках 5, 6 преобразовываются в Fx*[x(t)] , Fy*[y(t))] . В результате чего по истечении времени T2= t3-t2 на выходе коррелометра 9 получается результат Kxy*(τ) измерения конкорреляционной функции Kxy(τ).
Этап 4. (Временной интервал (t3,t4]): измерение времени запаздывания τз и производных от него характеристик θ.
По окончании измерения конкорреляционной функции Kxy(τ) в экстрематоре (экстремальном регуляторе) 10 происходит измерение значения интервала временной задержки τз конкорреляционной функции Kxy(τ), при котором результат ее измерения Kxy*(τ) имеет максимальное значение, а в блоке 11 пересчет τз в другую искомую (при необходимости характеристику θ.
На этом один акт работы измерителя заканчивается.
Как уже упоминалось, возможны два варианта работы. Первый, когда вначале измеряются Fx и Fy, а затем осуществляется перестройка управляемых функциональных преобразователей 5 и 6 и после этого выполняется измерение Kxy(τ). . Второй, когда Fx(x) и Fy(y) и Kxy(τ) измеряются одновременно (синхронно), а перестройка блоков 5 и 6 осуществляется автоматически по мере измерения Fx(x) и Fy(y). Понятно, что при этом необходимо иметь время на адаптацию измерителя, т.е. на его вхождение в режим, когда статистические погрешности измерения Fx(x) и Fy(y) станут незначительными - не существенно влияющими на точность измерения Kxy(τ), либо (что корректнее) на τз .
Итак с выхода 20 коррелометра 9 на вход экстремального регулятора 10 последовательно или параллельно поступают отсчеты K и
и  В результате на выходе 21 блока 10 получается значение временной задержки τ
В результате на выходе 21 блока 10 получается значение временной задержки τ Например, скорость проката стали V=L/τз.
Например, скорость проката стали V=L/τз.
Измерение временной задержки в режиме 1 включает этап измерения взаимной корреляционной функции R
Таким образом, в предлагаемом измерителе реализованы следующие возможности: измерение одномерных функций распределения случайных сигналов, измерение обычной корреляционной (когда входы переключателей 7, 8 подключены к выходам 14, 15 соответственно) и конкорреляционной (когда входы переключателей 7, 8 подключены к выходам 18, 19) функций или полуконкорреляционной функции (когда вход переключателя 7 подключен к выходу 14, а вход переключателя 8 - к выходу 19, либо когда вход переключателя 7 подключен к выходу 18, а вход переключателя 8 - к выходу 15), измерение выходной задержки сигналов в нелинейных системах τз, а также через временную задержку производных от нее характеристик и параметров θ физических объектов.
Кроме того, данное устройство предполагает дополнительные возможности: сравнение корреляционных и конкорреляционных функций и полученных на их основе τз, а также использование оценок Fx*(x), Fy*(y), что позволяет определить влияние и характер нелинейностей, как в исследуемом объекте, так и в средствах, реализующих измерения. В частности, можно исследовать технологические процессы, происходящие в исследуемом объекте и, следовательно, контролировать качество этих процессов. Например, исследовать нелинейность процесса уменьшения температуры (остывания) проката при его прохождении на расстояние L между датчиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2543091C1 |
| ПАРАЛЛЕЛЬНЫЙ ЗНАКОВЫЙ КОРРЕЛОМЕТР | 1999 |
|
RU2174705C2 |
| МНОГОКАНАЛЬНЫЙ ЗНАКОВЫЙ КОРРЕЛОМЕТР | 1999 |
|
RU2177637C2 |
| Анализатор случайных процессов | 1986 |
|
SU1462294A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2541072C2 |
| Способ определения цикловой подачи топлива и устройство для его осуществления | 2015 |
|
RU2665566C2 |
| БИБЛИОТЕКА | 1973 |
|
SU383057A1 |
| ПАРАЛЛЕЛЬНЫЙ ЗНАКОВЫЙ КОРРЕЛОМЕТР | 2002 |
|
RU2252450C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДОВ И КАБЕЛЕЙ | 1999 |
|
RU2170436C2 |
| АНАЛИЗАТОР СЛУЧАЙНЫХ ПРОЦЕССОВ | 1973 |
|
SU364944A1 |
Изобретение относится к измерительной технике и может быть использовано в динамических системах, имеющих взаимно однозначные нелинейности. Техническим результатом является расширение функциональных возможностей за счет измерения временной задержки сигналов в нелинейных системах. Измеритель содержит блоки преобразования сигналов, измерители одномерных функций распределения, функциональные преобразователи, переключатели, коррелометр, экстремальный регулятор и вычислительный блок. 1 ил., 1 табл.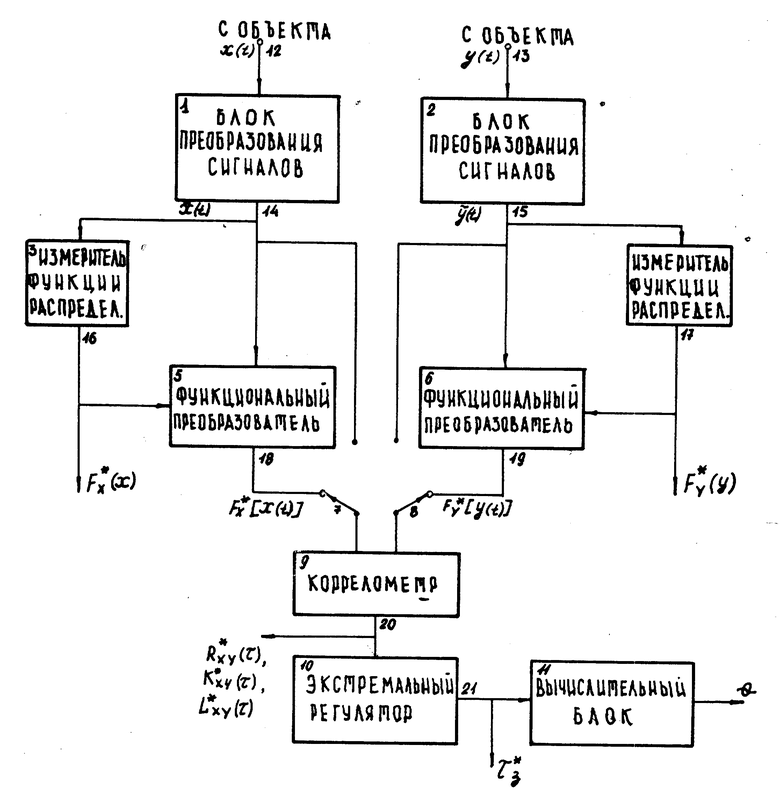
Измеритель временной задержки сигналов в динамических системах, содержащий два блока преобразования сигналов, входы которых являются входами измерителя, последовательно соединенные коррелометр, экстремальный регулятор, выход которого является выходом измерителя временной задержки, и вычислительный блок, отличающийся тем, что в него введены два измерителя одномерных функций распределения, два управляемых функциональных преобразователя и два переключателя, выходы которых подключены к входам коррелометра, первые входы первого и второго переключателей соединены соответственно с входами измерителей одномерных функций распределения, с информационными входами управляемых функциональных преобразователей, с выходами преобразования сигналов первого и второго каналов, а вторые входы переключателей - с выходами соответствующих управляемых функциональных преобразователей, управляющие входы которых соединены с выходами соответствующих измерителей одномерных функций распределения.
| Мелик-Шахназаров А.М., Маркатун М.Г | |||
| Цифровые измерительные системы корреляционного типа | |||
| - М.: Энергоатомиздат, 1985, с.10 - 14 | |||
| Березин С.Я., Каратаев О.Г | |||
| Корреляционные измерительные устройства в автоматике | |||
| - М.: Энергия, 1976, с.8-10 | |||
| Смолов В.Б | |||
| Функциональные преобразователи информации | |||
| - Л.: Энергоиздат, 1981, с.68 | |||
| Губарев В.В | |||
| Корреляционно-спектральные характеристики к взаимно однозначным безынерционным функциональным преобразованиям случайных процессов | |||
| "Автоматика и телемеханика", 1987, N 5, с.75-83 | |||
| Губарев В.В | |||
| Характеристики случайных элементов, инвариантные к взаимно однозначным безынерционным функциональным преобразованиям | |||
| Автометрия, N 6, 1984, с.29-34. |
