Изобретение относится к технике измерения скорости, а более конкретно - для прецизионного измерения движения протяженных объектов, например скорости движения кабелей, проводов, проката.
У данных объектов один измеряемый параметр должен быть информационным, т. е. меняющимся при движении объекта. Например, у кабелей таким информационным параметром является внешний диаметр кабеля, у проката - толщина листов и т.п.
Качество проводов и кабелей во многом определяется точностью выполнения предписанных технологических режимов, которые в сильной степени зависят от информации об изменении скорости. Поэтому прецизионное измерение скорости движения проводов и кабелей является актуальной задачей.
В настоящее время широко известны способы измерения параметров движения объектов, основанные на применении прикладных методов теории случайных функций. Широкое применение получили корреляционные экстремальные системы.
Известен способ, основанный на однозначном соответствии между скоростью движения объекта и ординатой автокорреляционной функции. На этом принципе работает автокорреляционный измеритель скорости проката (см. книгу С. Ф. Козубовского "Корреляционные экстремальные системы", Киев: Наукова Думка, 1973 г. , стр. 24-33). Этот измеритель состоит из датчика информации (осветителя и фотоэлемента), блока постоянной задержки сигнала, множительного устройства, интегратора и измерительного прибора.
Известен также способ, использующий зависимость от скорости абсциссы точки пересечения заданного уровня автокорреляционной функции. Устройство, реализующее данный способ, содержит блок регулируемой задержки, в отличие от рассмотренного выше устройства, а также дополнительно содержит вычитающее устройство (см. там же).
Однако данные способы обладают рядом недостатков, которые проявляются в устройствах, их реализующих.
Для успешной реализации указанных способов необходима повторяемость формы автокорреляционных функций (АКФ) информационных сигналов, что не всегда выполняется на практике.
Точность автокорреляционных измерителей сильно зависит от точности подсчета АКФ, которая зависит от длины реализации случайного сигнала. Увеличение длины приводит к повышению точности, однако это связано с процессом накопления информации, что приводит к уменьшению быстродействия устройства.
Известен также способ (см. там же), основанный на получении информации от двух датчиков, расположенных вдоль движущегося протяженного объекта, регулировании задержки сигнала, полученного с первого по ходу движения датчика, подсчете взаимокорреляционной функции (ВКФ) и поддержании ее экстремума. Устройство, реализующее данный способ, содержит два датчика информации, два усилителя, блок регулируемой задержки, множительное устройство, интегратор, экстремальный регулятор, указатель скорости. Заметим, что для нахождения экстремума необходимы поисковые колебания.
Наиболее близким к предлагаемому способу является способ, реализуемый так называемыми дифференциальными схемами (см. там же). При этом информация снимается с двух датчиков, расположенных вдоль движущегося объекта. На основании информационных сигналов вычисляются две взаимокорреляционные функции. Причем при вычислении одной из них сигнал с первого датчика задерживается на регулируемую величину задержки, а при вычислении другой сигнал с этого же датчика задерживается на фиксированную величину. Сигнал со второго датчика не подвергается временным задержкам. Разность получаемых ВКФ является управляющим сигналом для изменения величины регулируемой задержки. Устройство, реализующее данный способ, содержит два датчика информации, два усилителя, две схемы совпадения, два интегратора, два вычитающих устройства, генератор тактовых импульсов, счетчик, частотомер, тахогенератор, регистр сдвига.
Реализация этого способа позволяет избежать поисковых колебаний, что повышает быстродействие. Однако быстродействие существенно ограничено процессом вычисления корреляционной функции.
Другим недостатком данного способа является необходимость обеспечения достаточно большого расстояния между датчиками информации (базы измерения), необходимого по соображениям точности. Это требование находится в противоречии с требованием быстродействия.
Кроме того, необходимо отметить низкую чувствительность способа измерения скорости, основанного на использовании корреляционных функций.
Целью настоящего изобретения является повышение быстродействия и точности измерения скорости.
Поставленная цель достигается тем, что в известном способе измерения скорости протяженного объекта, включающем операции усиления двух сигналов, регистрируемых двумя датчиками, расположенными один за другим вдоль движущегося объекта, регулируемой задержки сигнала, регистрируемого первым датчиком по ходу движения объекта, умножения задержанного сигнала на второй сигнал, сглаживающей фильтрации (интегрирования) полученного первого произведения, дополнительной задержки на фиксированную величину первого задержанного сигнала, умножения его на второй сигнал, сглаживающей фильтрации второго произведения, вычитания его из первого произведения и управления этой разностью величиной регулируемой задержки, которая однозначно соответствует величине скорости, после операции регулируемой задержки сигнала с первого датчика введены операции вычитания этого сигнала из второго сигнала и его дифференцирования с последующим делением полученной разности сигналов на производную задержанного сигнала и управления отношением величиной задержки, однозначно соответствующей величине скорости.
Принципиальное отличие предложенного способа измерения скорости от известных заключается в том, что данный способ позволяет выделить малые изменения скорости, что увеличивает чувствительность и точность измерения.
Как правило, сигналы, регистрируемые датчиками, являются случайными. Например, для кабелей и проводов эти сигналы несут информацию о диаметре внешнего конструктивного элемента, для проката - о рельефе поверхности проката и т.п.
Известно каноническое разложение случайной функции Y(t) с нулевым математическим ожиданием на некоррелированные слагаемые (см., например, Пугачев В.С. "Теория случайных функций", Москва, Физматгиз, 1960):
где νn - некоррелированные случайные величины;
xn(t) - координатные функции.
Частным случаем канонического разложения является спектральное разложение стационарных случайных функций с координатными функциями sin(ωnt) и cos(ωnt):
Ступенчатое изменение скорости движения изделия приводит к умножению аргумента в (2) на постоянный коэффициент k, пропорциональный величине изменения скорости, т.е.:
(ωn)деф = ωn• k (3)
Каноническое разложение с этого момента примет вид:
Путем выбора соответствующего расстояния между датчиками и соответствующей фильтрации исходных сигналов их разность можно представить с наперед заданной точностью в виде:
Δ Y(t) = t•(k-1)•Y'1(t), (5)
где Y'1(t) - производная сигнала с первого датчика по ходу движения объекта.
Таким образом при скачкообразном изменении скорости разность сигнала со второго датчика и задержанного сигнала с первого датчика соответствует выражению (5).
В результате деления полученной разности на производную первого сигнала, получим, как следует из (5), линейно нарастающий сигнал с наклоном, пропорциональным изменению скорости, длительность которого определяется временем прохождения объектом расстояния между датчиками.
Благодаря наличию линейно нарастающего сигнала, появляющегося в результате предложенной последовательности операций над сигналами, происходит усиление коэффициента изменения скорости движения, что увеличивает чувствительность способа и точность измерения.
Выше было отмечено, что быстродействие существенно ограничено процессом вычисления корреляционной функции. Предложенный способ является более быстродействующим из-за отсутствия в предложенной последовательности операций над сигналами процесса вычисления корреляционной функции.
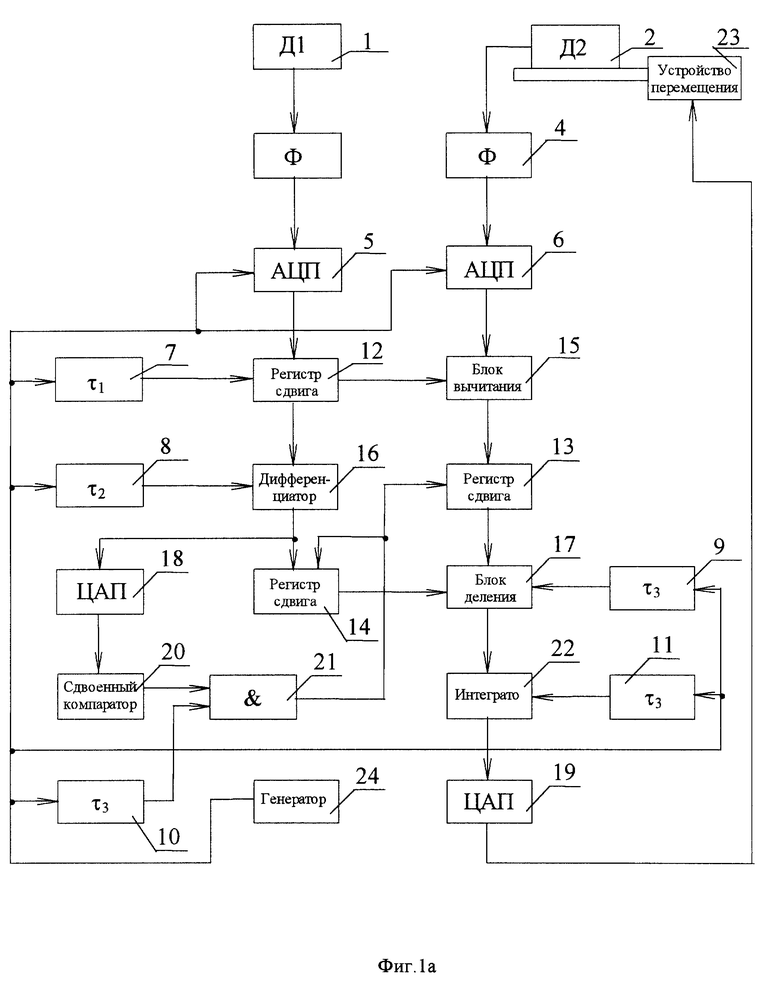
Функциональная схема устройства, реализующего предложенный способ, показана на фиг. 1.
Д1, Д2 - датчики, регистрирующие информационные сигналы, причем Д1 является первым по ходу движения объекта, а Д2 - вторым;
БРЗ - блок регулируемой задержки;
БВ - блок вычитания;
БДф - блок дифференцирования;
БД - блок деления.
В установившемся движении время транспортного запаздывания τ, т.е. время прохождения объектом расстояния между двумя датчиками, равно величине регулируемой задержки БРЗ τp. Поэтому разность на выходе блока вычитания равна нулю. При известном расстоянии L между датчиками Д1 и Д2 и известной величине задержки τp может быть однозначно определена скорость.
При изменении скорости время прохождения объектом расстояния между двумя датчиками τ уже не равно величине регулируемой задержки τp, и, следовательно, на выходе блока вычитания появляется сигнал, отличный от нуля (см. (5)). На выходе БД появляется линейно нарастающий сигнал.
В зависимости от конкретного устройства, реализующего данный способ, возможно несколько вариантов использования этого линейно нарастающего сигнала (или его преобразования). Например, данный сигнал может воздействовать на БРЗ с тем, чтобы уравнять τ и τp, или воздействовать на положение одного из датчиков с той же целью.
На фиг. 1a показана структурная схема устройства, реализующего предложенный способ. В блоке деления 17 введены следующие обозначения:
1 - вход делимого;
2 - вход делителя.
На фиг. 2 показана структурная схема дифференцирующего устройства.
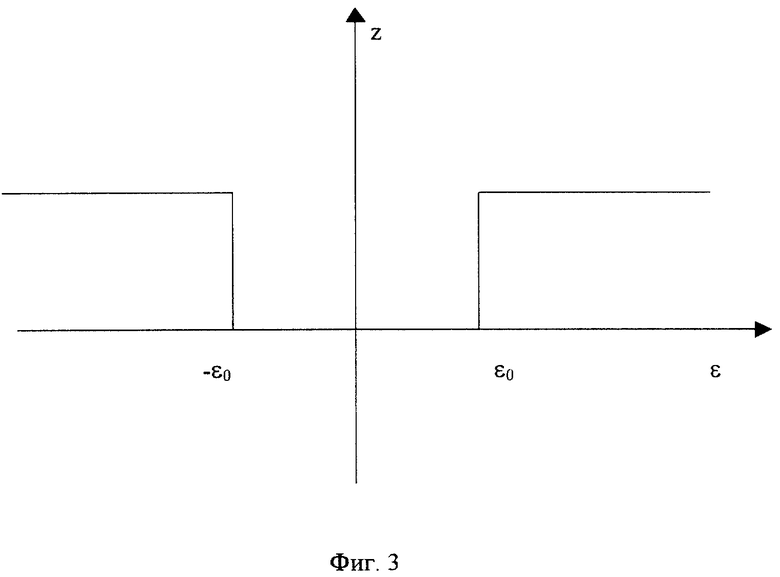
На фиг. 3 показана статическая характеристика сдвоенного компаратора.
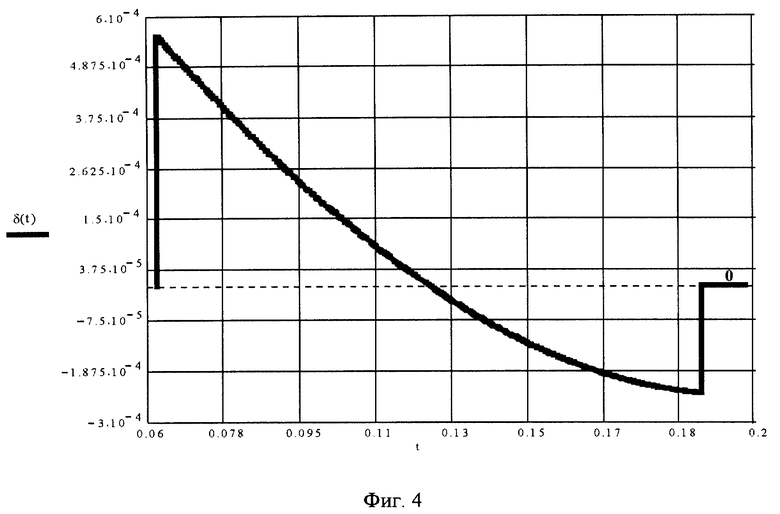
На фиг. 4 показана разность информационных сигналов ΔY на выходе блока 9 при ступенчатом изменении скорости.
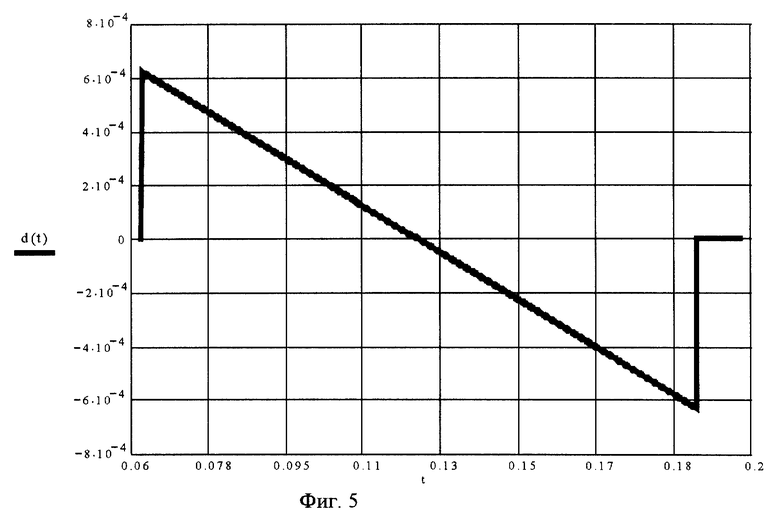
На фиг. 5 показан результат деления ΔY на Y'.
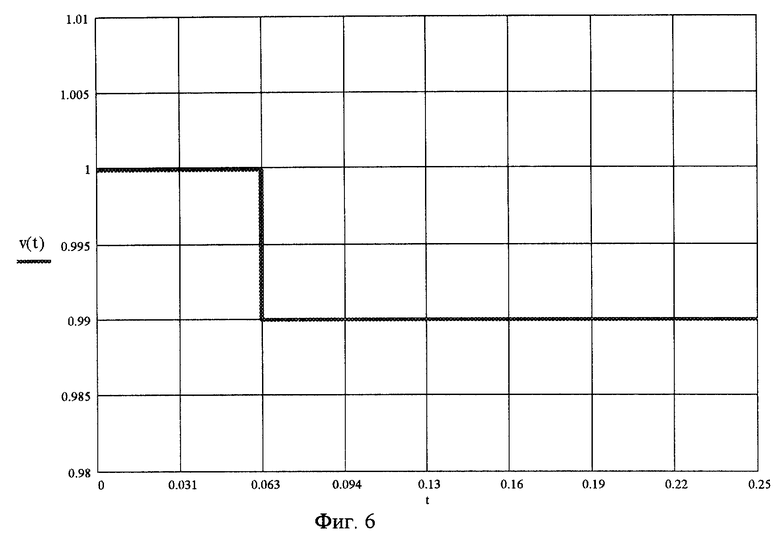
На фиг. 6 показан сигнал на выходе интегратора.
Устройство состоит из датчиков информации 1, 2, фильтров 3, 4, АЦП 5, 6, блоков задержки 7, 8, 9, 10, 11, регистров сдвига 12, 13, 14, блока вычитания 15, дифференцирующего блока 16, блока деления 17, ЦАП 18, 19, сдвоенного компаратора 20, схемы совпадения 21, интегратора 22, устройства перемещения 23, генератора прямоугольных импульсов 24, причем один датчик информации установлен неподвижно, другой же - на подвижной платформе устройства перемещения, а выходы датчиков информации 1, 2 соединены со входами фильтров 3, 4, выходы которых соединены с информационными входами АЦП 5, 6, тактовые входы АЦП 5, 6 соединены с выходом генератора 24, информационный выход АЦП 5 через регистр сдвига 12 соединен с информационным входом дифференцирующего устройства 16 и входом 1 блока вычитания 15, а вход 2 блока вычитания соединен с выходом АЦП 6, выходы блоков вычитания 15 и дифференцирования 16 через регистры сдвига 13, 14 соединены с информационными входами 1,2 блока деления 17 соответственно, а тактируемые входы этих регистров соединены с выходом схемы совпадения 21, один вход которой соединен с выходом генератора 24 через блок задержки 10, а другой вход соединен с выходом дифференцирующего блока 16 через ЦАП 18 и компаратор 20, выход блока деления 17 соединен со входом интегратора 22, выход которого соединен через ЦАП 19 со входом устройства перемещения 23, выход генератора 24 соединен с тактируемыми входами регистров сдвига 12, дифференцирующего блока 16, блока деления 17, интегратора 22, через блоки задержки 7, 8, 9, 11 соответственно.
В устройстве использованы стандартные элементы. Конкретный тип датчиков 1, 2 зависит от области применения.
Например, для кабельной промышленности при измерении скорости движения кабеля (проволоки) датчиками являются измерители диаметра. Количество ячеек в регистре сдвига 12 определяется расстоянием между датчиками и скоростью движения изделия в установившемся режиме и равно количеству тактовых импульсов генератора 24 за время прохождения изделием расстояния между датчиками с постоянной скоростью.
В блоке вычитания 15 из информации, поступающей на вход 2, вычитается информация, поступающая на вход 1.
Дифференцирующий блок 16 производит численное дифференцирование сигнала с датчика.
В блоке 17 на вход 1 поступает делимое, на вход 2 - делитель.
Для исключения деления на ноль или на малую величину, сравнимую с шумами, введен сдвоенный компаратор, разрешающий перезапись информации в регистры сдвига 13, 14, состоящие из одной ячейки, только при выполнении условия: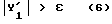 ,
,
где Y1 - делитель, ε - наперед заданная величина, определяемая шумами (ошибками округления).
При невыполнении условия сохраняется предыдущая информация. Интегратор 22 является накапливающим сумматором.
Генератор 24 генерирует тактовые импульсы с заданной частотой.
Устройство перемещения 23 является устройством позиционного типа с электроприводом и позволяет перемещать второй датчик вдоль движущегося изделия (кабеля).
Датчики 1, 2 расположены вдоль движущегося кабеля, причем датчик 1 расположен первым по ходу движения, второй датчик установлен на подвижной платформе. Рассмотрим движение изделия с постоянной скоростью.
Информация с датчика 2 после фильтрации и дискретизации поступает на блок вычитания 15, а с датчика 1 - на регистр сдвига 12. Скорость продвижения информации в регистре 12 определяется частотой генератора 24. В регистре сдвига 12 происходит задержка информации с датчика 1 при поступлении ее на блок вычитания. За время задержки в регистре 12 изделие проходит расстояние от датчика 1 до датчика 2.
Поэтому при постоянной скорости движения на вход 1 и 2 будет поступать одна и та же информация, следовательно, на выходах блоков 15 и 17 будет ноль и на выходе интегратора 22 информация не изменится, что соответствует постоянной скорости.
Пусть скорость движения изменилась. Для простоты рассмотрим ступенчатое изменение скорости. При ограниченном ускорении движущегося изделия и соответствующем расстоянии между датчиками можно считать изменение скорости изделия достаточно малым за время прохождения им расстояния между датчиками.
В момент изменения скорости датчики Д1, Д2 считывают информацию с измененным интервалом дискретности по длине кабеля, а в регистре сдвига 12 записана информация, считанная с прежним интервалом дискретности по длине кабеля. Поэтому информация, поступающая на блок вычитания 15, будет соответствовать разным интервалам дискретности по длине кабеля и, следовательно, разным точкам кабеля.
Таким образом, при изменении скорости происходит относительная деформация (сжатие или растяжение при увеличении или уменьшении скорости движения кабеля соответственно), частотной структуры временных сигналов, поступающих с Д1 и Д2. Информация с регистра 12 дифференцируется и поступает на вход ЦАП 18 и регистр сдвига 14.
При скачкообразном изменении скорости на выходе блока вычитания 15 разность будет соответствовать выражению (5).
Блок 16 дифференцирует сигнал с выхода регистра. В блоке 17 происходит деление Δ Y(t) на Y'(t).
В результате на выходе блока 17 появляется линейно нарастающий сигнал с наклоном, пропорциональным изменению скорости, длительность которого определяется временем прохождения кабелем расстояния между датчиками.
Блоки 18, 20, 21, 13, 14 необходимы для исключения деления на ноль или на очень малую величину, сравнимую с ошибками округления.
Если условие (6) не выполняется, то на выходе 20 появится ноль, и схема совпадения не пропустит тактовый импульс с генератора, тем самым не произойдет запись Y' и ΔY в регистр сдвига 14 и 13, и на выходе блока 17 сохранится предыдущий результат, в котором условие (6) выполняется.
Результат деления интегрируется блоком 22 по длине кабеля, и на его выходе будет величина, пропорциональная скачкообразному изменению скорости (кабель проходит расстояние, равное базе).
В соответствии с изменением скорости движения кабеля происходит перемещение датчика Д2, т.е. положение Д2 может быть проградуировано в единицах скорости. При этом сохраняется количество тактовых импульсов с генератора 24 за время прохождения кабелем расстояния между датчиками Д1 и Д2.
Блоки задержки 7, 8, 10, 11 необходимы для синхронизации работы всего устройства и обеспечивают последовательность срабатывания блоков 12, 16, 21, 17, 22.
При произвольном изменении скорости движения кабеля в силу линейности системы на выходах интегратора 22 и ЦАП 19 в установившемся режиме будет величина, пропорциональная скорости.
На фиг. 4-6 показаны результаты имитационного моделирования при ступенчатом изменении скорости на 1%.
Результаты имитационного моделирования позволяют сделать вывод о высокой чувствительности и точности предлагаемого способа.
Таким образом, в предлагаемом способе достигнута высокая точность и чувствительность измерения благодаря организации такой последовательности операций над сигналами, которая позволяет выделить линейно нарастающий сигнал, производная которого пропорциональна изменению скорости.
Быстродействие предлагаемого способа определяется расстоянием между датчиками, которое может быть достаточно малым, и отсутствием операций над сигналами по вычислению среднестатистических характеристик.
Источники информации
1. Козубовский С.Ф. "Корреляционные экстремальные системы", Киев: Наукова Думка, 1973 г., с. 29, 36 - аналоги, с. 109 - прототип.
Способ предназначен для прецизионного измерения движения протяженных объектов, например скорости движения кабелей, проводов, проката. Высокая точность и чувствительность измерения достигаются за счет такой последовательности операций над сигналами, которая позволяет выделить линейно нарастающий сигнал, производная которого пропорциональна изменению скорости, а быстродействие определяется расстоянием между датчиками, которое может быть достаточно малым, и отсутствием операций над сигналами по вычислению среднестатических характеристик. Способ включает операции усиления двух сигналов, регистрируемых двумя датчиками, расположенными вдоль движущегося объекта. После операции регулируемой задержки сигнала с первого датчика осуществляют операцию вычитания этого сигнала из сигнала второго датчика. Затем дифференцируют этот сигнал с последующим делением разности сигналов на производную задержанного сигнала. Управляют отношением величиной задержки, однозначно соответствующей величине скорости. 6 ил.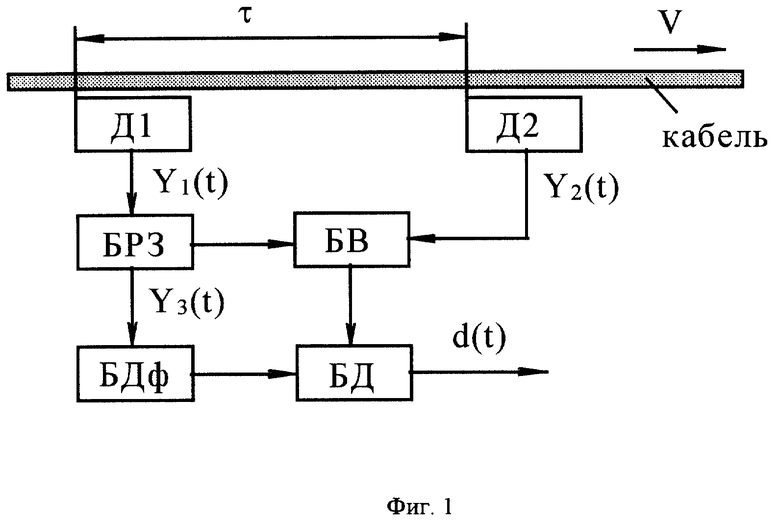
Способ измерения скорости движения проводов и кабелей, включающий операции усиления двух сигналов, регистрируемых двумя датчиками, расположенными один за другим вдоль движущегося объекта, регулируемой задержки сигнала, регистрируемого первым датчиком по ходу движения кабеля (провода), управления величиной регулируемой задержки, которая однозначно соответствует величине скорости движения кабеля, отличающийся тем, что после операции регулируемой задержки сигнала с первого датчика введены операции вычитания этого сигнала из второго сигнала и его дифференцирования с последующим делением полученной разности сигналов на производную задержанного сигнала.
| Козубовский С.Ф | |||
| Корреляционные экстремальные системы | |||
| - Киев: Наукова Думка, 1973, с.109 | |||
| Способ измерения скорости движения проводника с током | 1988 |
|
SU1672377A1 |
| Устройство для измерения скорости движения объекта | 1989 |
|
SU1661645A1 |
| АВТОМАТНАЯ ЛЕГИРОВАННАЯ СТАЛЬ | 1997 |
|
RU2128724C1 |

