Изобретение относится к медицинской технике, в частности к устройствам для лечения дистрофических заболеваний позвоночника с применением вытяжения и вибрационного воздействия паравертебрально продольно и поперечно. Устройство может найти применение для лечения больных с неврологическими проявлениями поясничного остеохондроза с рефлекторными и корешковыми проявлениями, а также для лечения больных с начальными проявлениями спондилоартроза.
Известен стол для вытяжения позвоночника, содержащий основание, две панели, ручной привод поворота панелей, вытяжное устройство и устройство для регулирования усилия вытяжения (Патент СССР N 634642, A 61 F 5/04, 1974).
Известен стол для вытяжения позвоночника, содержащий грудную и тазовую панели со средствами крепления больного, установленные на рамках с возможностью угловых поворотов вокруг своей продольной оси и передвижений вдоль продольной оси, кинематические связанные каждая со своим механизмом угловых поворотов и передвижения, расположенным между панелью и рамой, основание, на котором установлены рамы с панелями с возможностью угловых поворотов вокруг поперечной оси стола, а рама с тазовой панелью - и вокруг вертикальной оси стола, и кинематически связанные каждая со своим механизмом угловых поворотов, расположенным между основанием и рамой. При этом панели установлены таким образом, что имеют общую точку пересечения осей всех угловых поворотов обеих панелей, а механизмы угловых поворотов панелей и рам и передвижений панелей выполнены в виде ручных приводов с механическими передачами (Авт.св. СССР N 955918, A 61 F 5/04, 1982).
Однако известные устройства не позволяют одновременно с вытяжением воздействовать на позвоночник таким лечебным фактором как вибрация.
Известен также стол для вытяжения позвоночника, содержащий грудную и тазовую панели с средствами крепления больного, установленные на рамках с возможностью угловых поворотов вокруг своей продольной оси и передвижения вдоль продольных осей рам и кинематически связанные каждая со своим механизмом угловых поворотов и передвижений, расположенным между панелью и рамой, основание, на котором рамы с панелями установлены с возможностью угловых поворотов вокруг поперечной оси стола, а рама с тазовой панелью - и вокруг вертикальной оси стола, и кинематически связанные каждая со своим механизмом угловых поворотов, расположенным между основанием и рамой, вибратор со штоком, установленный на основании между панелями с возможностью продольного и поперечного передвижения и кинематически связанный с механизмом передвижения, и электронный блок управления работой вибратора. При этом панели установлены таким образом, что имеют общую точку пересечения осей всех угловых поворотов обеих панелей, а механизмы угловых поворотов панелей и рам и передвижений панелей и вибратора выполнены в виде ручных приводов с механическими передачами (Патент РФ N 2020904 A 61 F 5/04, 1994).
Однако из-за ручных приводов известные устройства не позволяют проводить вытяжение и оказывать вибрационное воздействие на позвоночник в автоматизированном режиме. Кроме этого, из-за того, что механизмы передвижения панелей вдоль продольной оси рамы (механизмы вытяжения) не связаны между собой и работают независимо друг от друга, при вытяжении позвоночника тело больного смещается в сторону вытяжения.
Сущность изобретения заключается в том, что для облегчения проведения вытяжения и вибрационного воздействия на позвоночник в автоматизированном режиме и исключения смещения тела при вытяжении в одну из сторон, в заявляемой установке для лечения дистрофических заболеваний позвоночника, содержащей грудную и тазовую панели со средствами крепления больного, установленные на рамках с возможностью угловых поворотов вокруг своей продольной оси и кинематически связанные каждая со своим приводом с механической передачей, расположенным между панелью и рамой, при этом рамы установлены с возможностью угловых поворотов вокруг поперечной оси и кинематически связаны каждая со своим приводом с механической передачей, основание, вибратор со штоком, установленный на основании между панелями с возможностью продольного и поперечного передвижения и кинематически связанный с приводом с механической передачей, расположенным на основании, и электронный блок управления работой вибратора, отличием является то, что тазовая панель состоит из плиты и поддона, кинематически связанных между собой с возможностью угловых поворотов плиты вокруг своей вертикальной оси с помощью привода с механической передачей, расположенного между поддоном и плитой, рамы с панелями установлены с возможностью угловых поворотов вокруг своих поперечных осей на фигурных вилкообразных каретках, установленных на основании и связанных с общим приводом с механической передачей таким образом, чтобы каретки передвигались одновременно в противоположные стороны, при этом все приводы выполнены в виде электроприводов, а установка дополнительно снабжена системой управления электроприводами.
Кроме этого, механическая передача привода кареток выполнена в виде передачи с двумя гибкими связями с непосредственным соединением, одна из которых связана с соответствующей кареткой через ползун, расположенный на нижней части каретки и кинематически связанный с датчиком усилия вытяжения, расположенным на нижней части каретки, а вторая гибкая связь жестко соединена с нижней частью другой каретки.
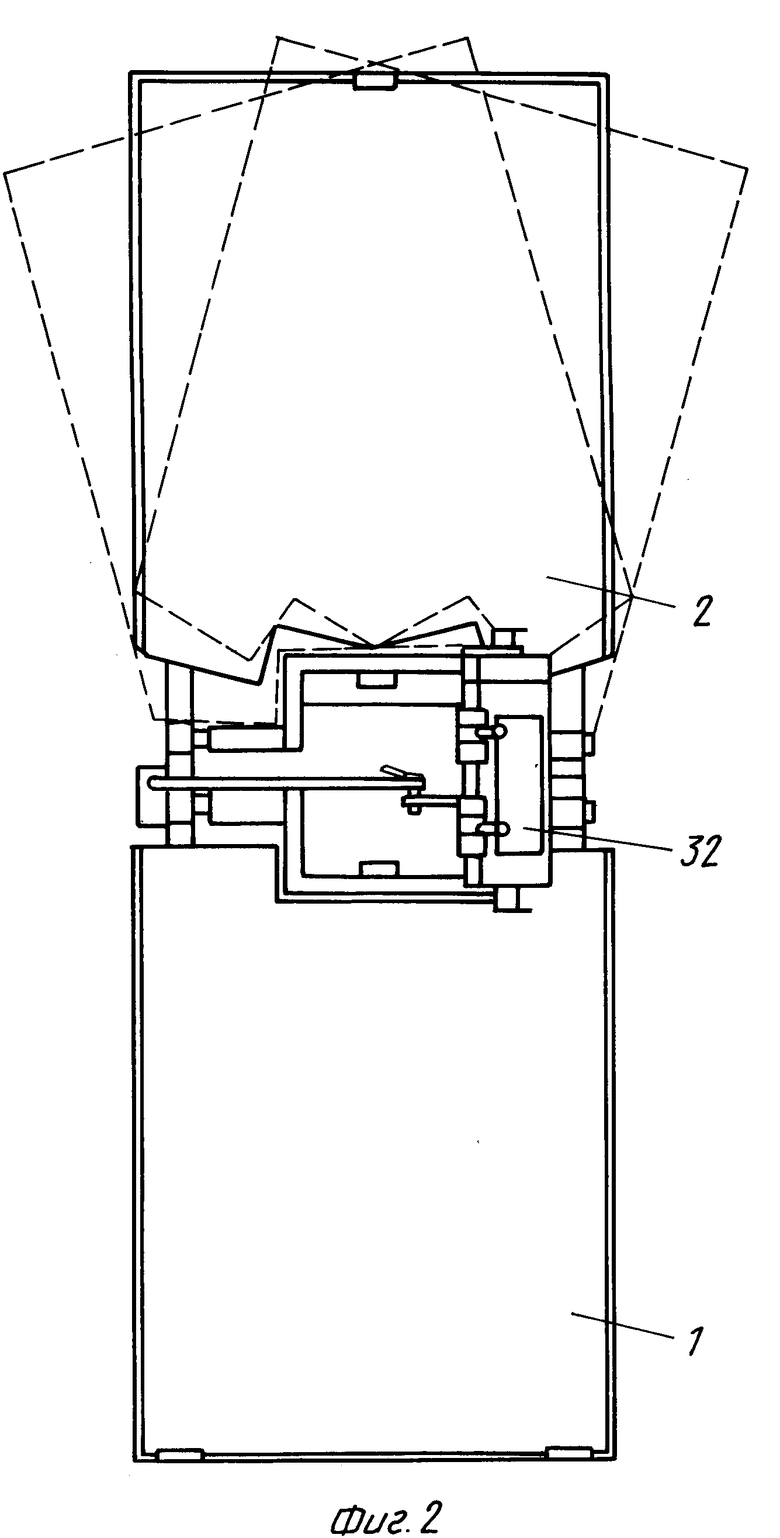
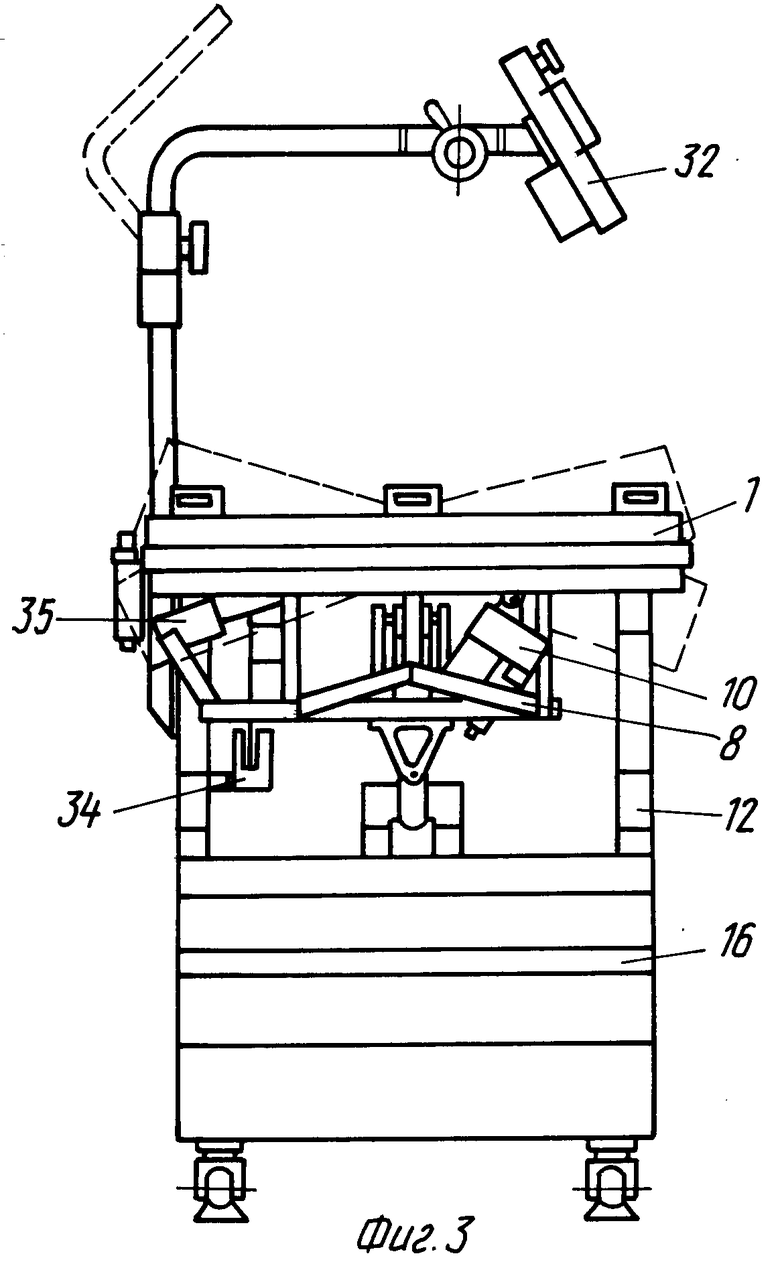
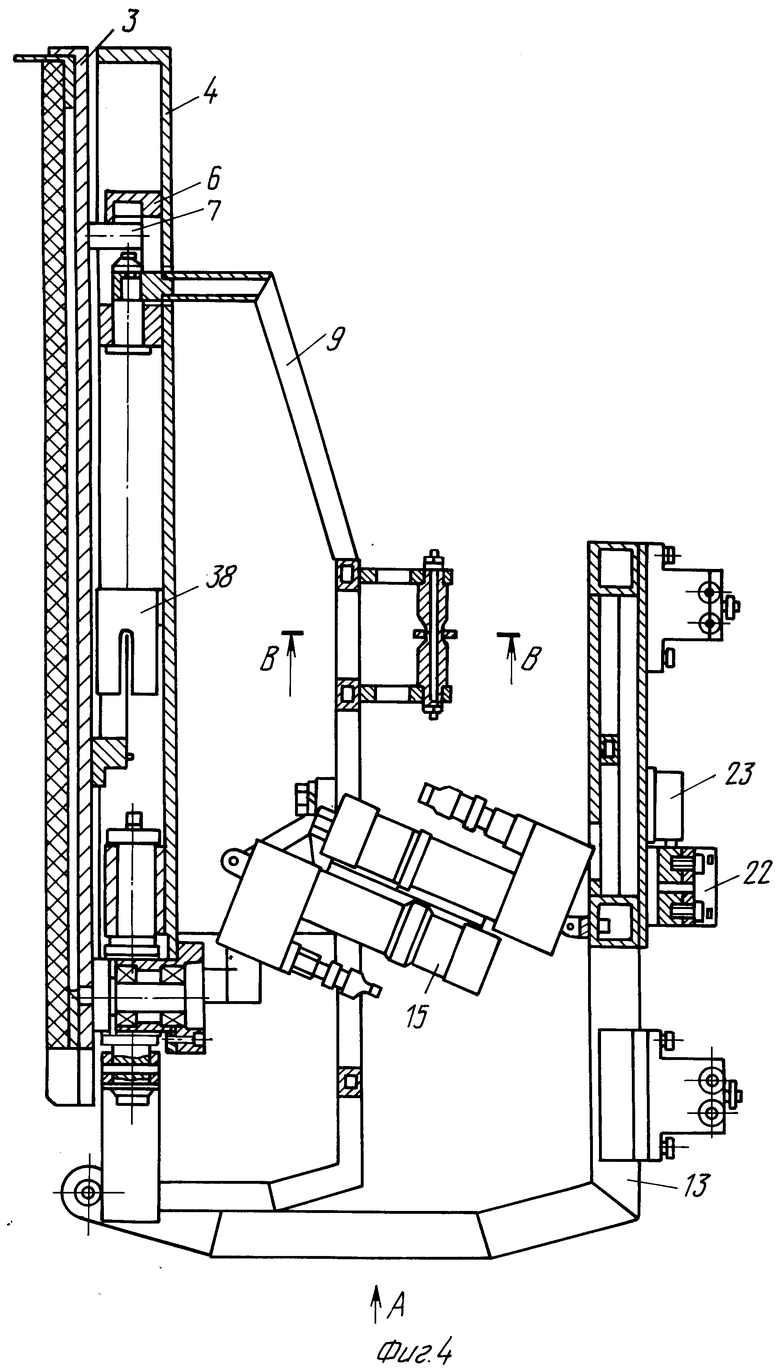
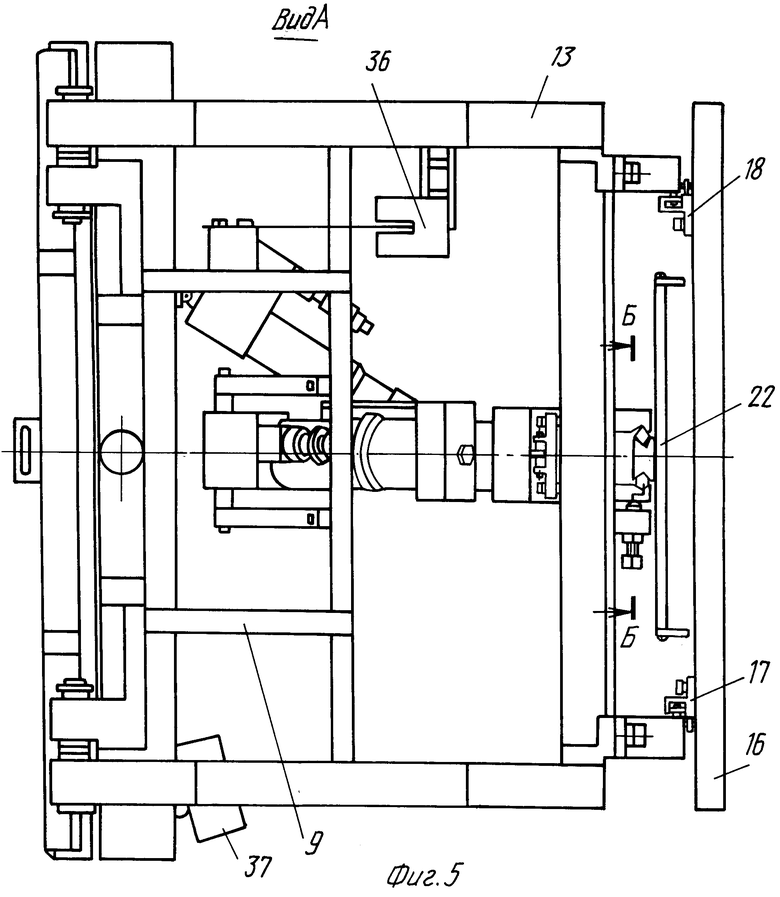
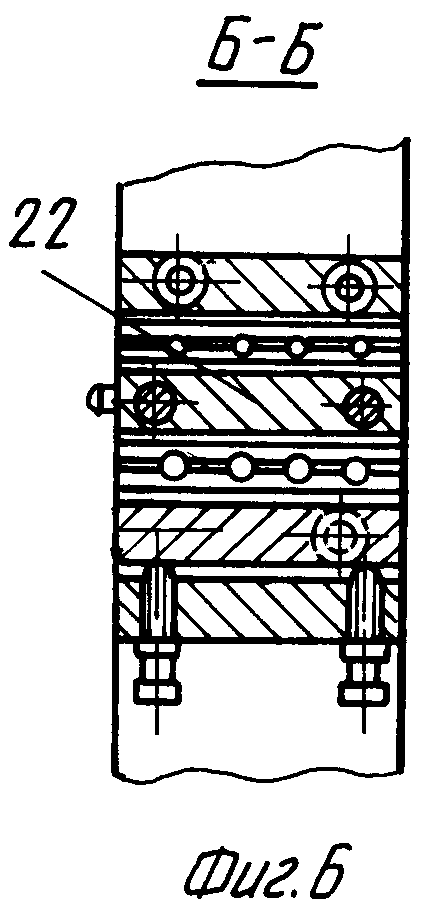
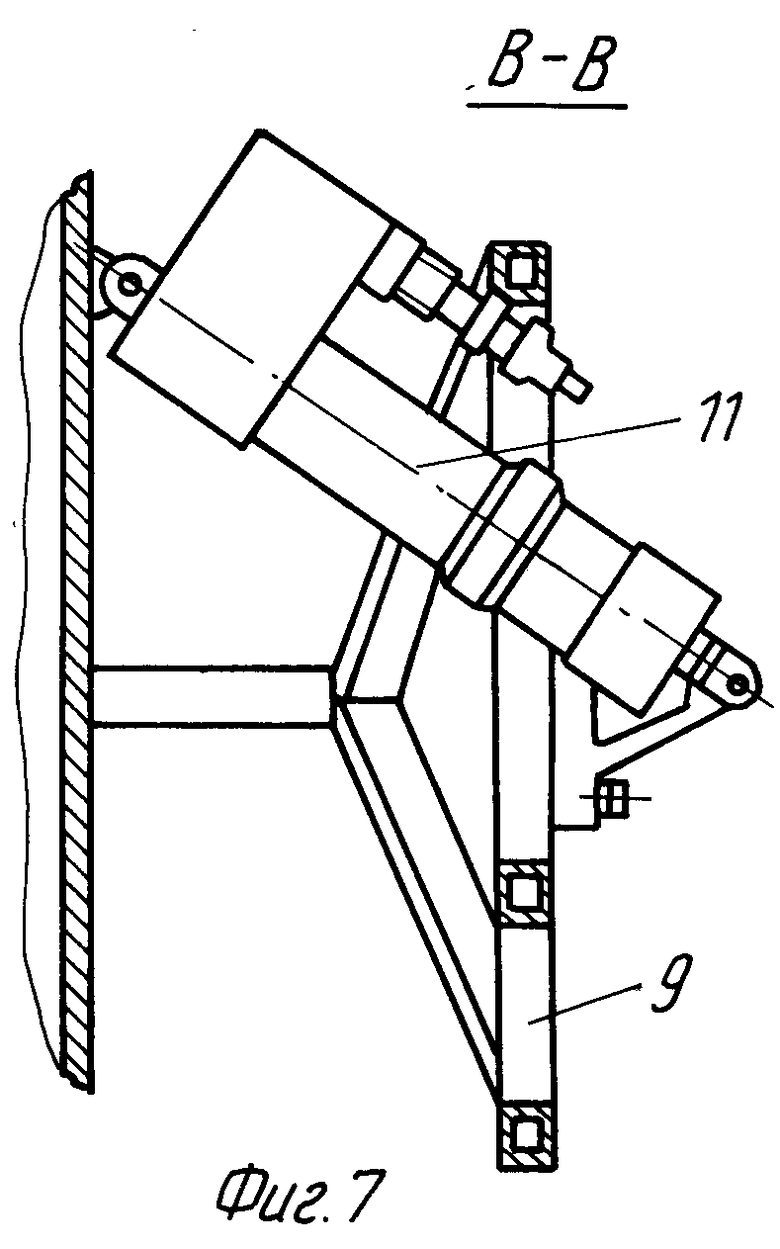
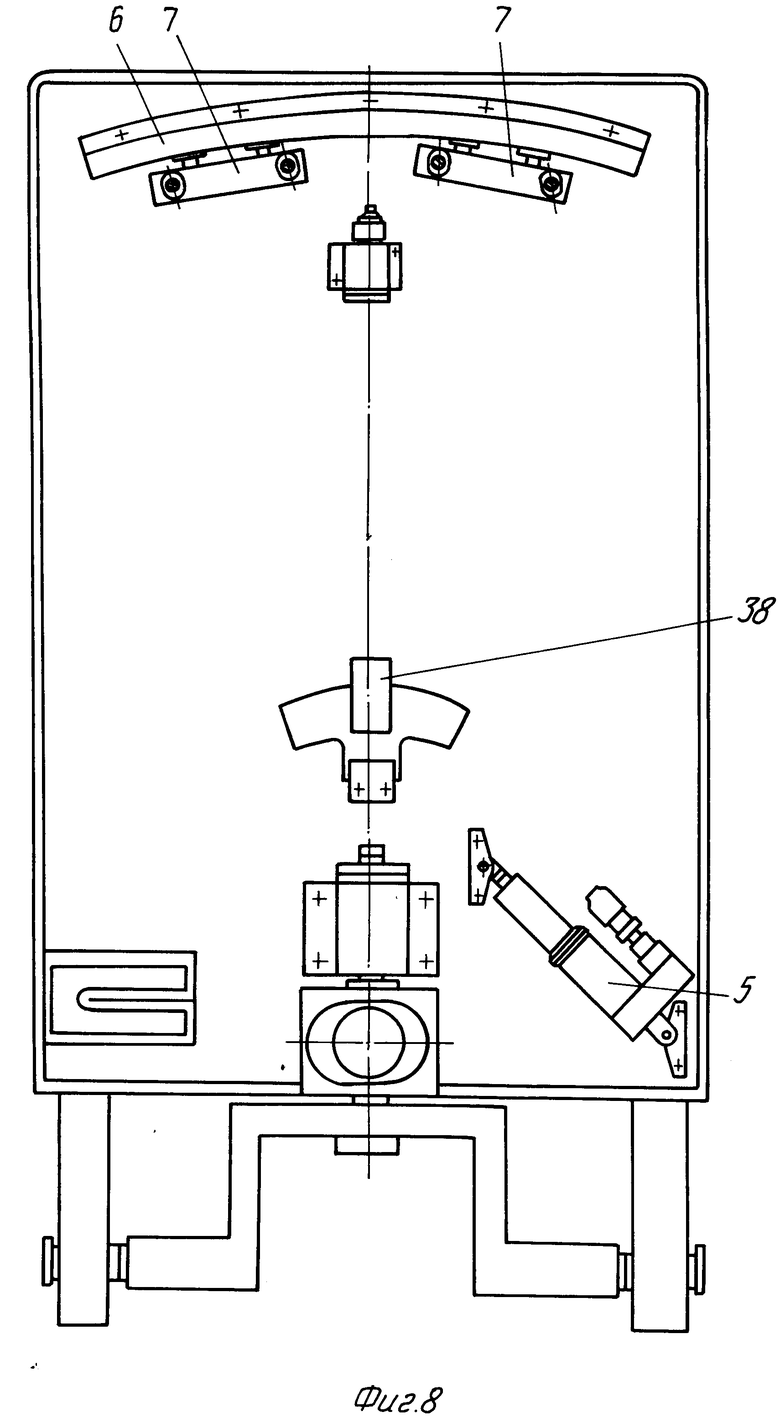
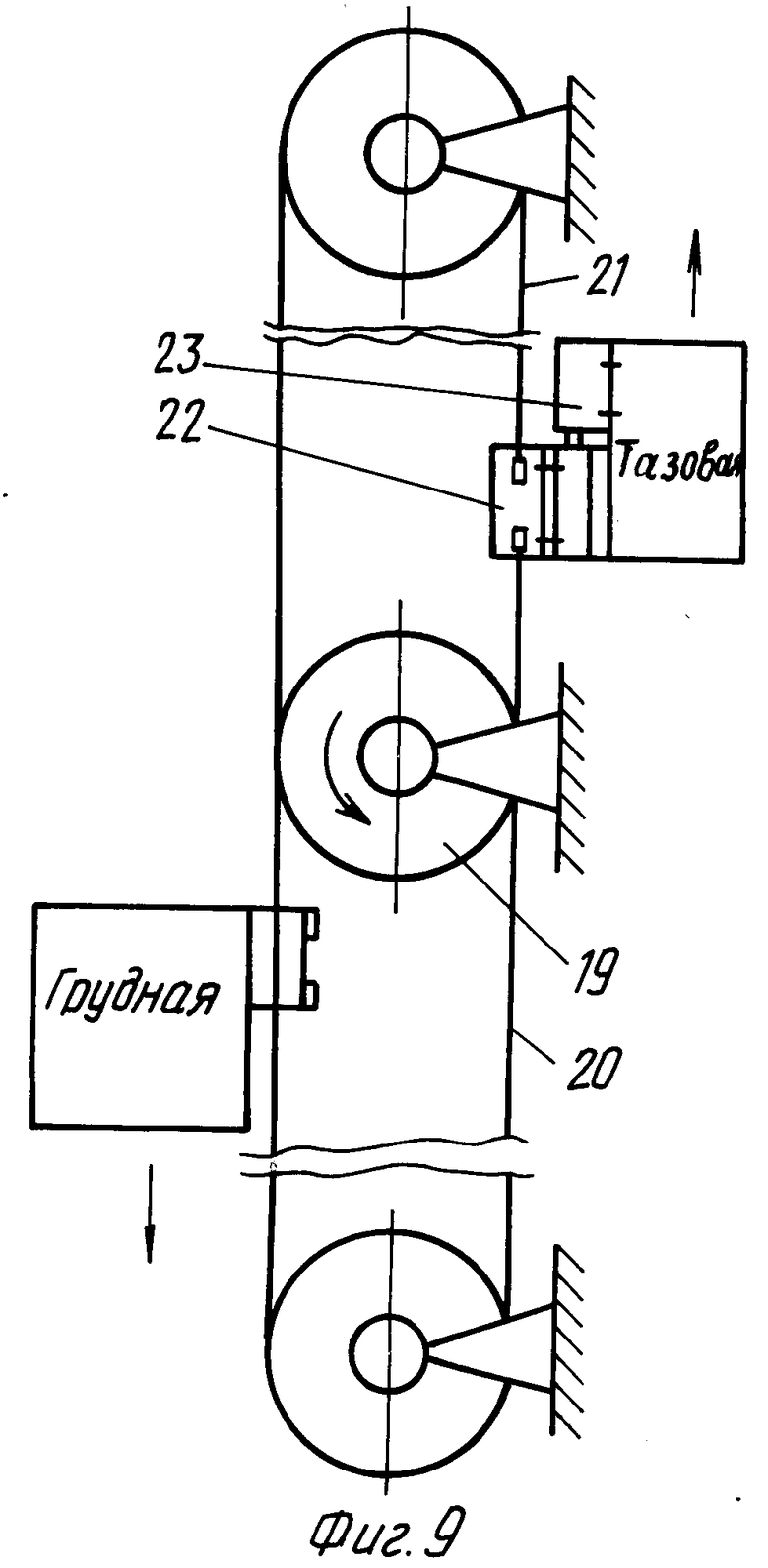
Изобретение поясняется чертежами: фиг. 1 - общий вид установки спереди; фиг. 2 - общий вид установки сверху; фиг. 3 - вид установки с торцевой части грудной панели; фиг. 4 - часть установки с тазовой панелью, вид спереди; фиг. 5 - вид А на фиг. 4; фиг. 6 - сечение Б-Б на фиг. 5; фиг. 7 - сечение В-В на фиг. 4; фиг. 8 - поддон тазовой панели, вид сверху; фиг. 9 - привод продольного перемещения фигурных вилкообразных кареток; фиг. 10 - датчик усилия вытяжения; фиг. 11 - вибратор, вид спереди; фиг. 12 - система управления электроприводами.
Установка для лечения дистрофических заболеваний позвоночника содержит грудную панель 1 и тазовую панель 2, снабженные средствами крепления больного (на чертежах не показаны). Тазовая панель 2 состоит из плиты 3 и поддона 4, при этом плита 3 установлена на поддоне 4 с возможностью угловых поворотов вокруг своей вертикальной оси с помощью электропривода 5 с механической передачей, расположенного между поддоном 4 и плитой 3 и кинематически связанного с ними. Кроме этого, плита 3 и поддон 4 соединены кинематической связью, состоящей из радиусной направляющей 6, выполненной на поддоне 4 и опор 7, закрепленных на плите 3. Опоры 7 предназначены для восприятия усилия отрыва панели 2 при вытяжении, которое замыкается через опоры 7 на плоскости радиусной направляющей 6. Панели 1 и 2 установлены на рамках 8 и 9, соответственно, с возможностью угловых поворотов вокруг своих продольных осей с помощью электроприводов 10 и 11, соответственно, расположенных между панелями 1 и 2 и рамами 8 и 9 соответственно. Рамы 8 и 9 установлены на фигурных вилкообразных каретках 12 и 13 соответственно, с возможностью угловых поворотов своих поперечных осей с помощью электроприводов 14 и 15 соответственно, расположенных между рамами 8 и 9 и каретками 12 и 13 соответственно. Каретки 12 и 13 установлены на основании 16 с возможностью продольных перемещений в направляющих 17 и 18 и связаны с общим электроприводом 19 с механической передачей с двумя гибкими связями 20 и 21 с непосредственным соединением таким образом, чтобы каретки 12 и 13 перемещались одновременно в противоположные стороны. При этом одна из кареток, например каретка 13, связана с соответствующей гибкой связью, например гибкой связью 21, через ползун 22, расположенный на нижней части каретки 13 и кинематически связанный с датчиком 23 усилия вытяжения, расположенным на нижней части вилкообразной каретки 13, а вилкообразная каретка 12 жестко соединена с гибкой связью 20.
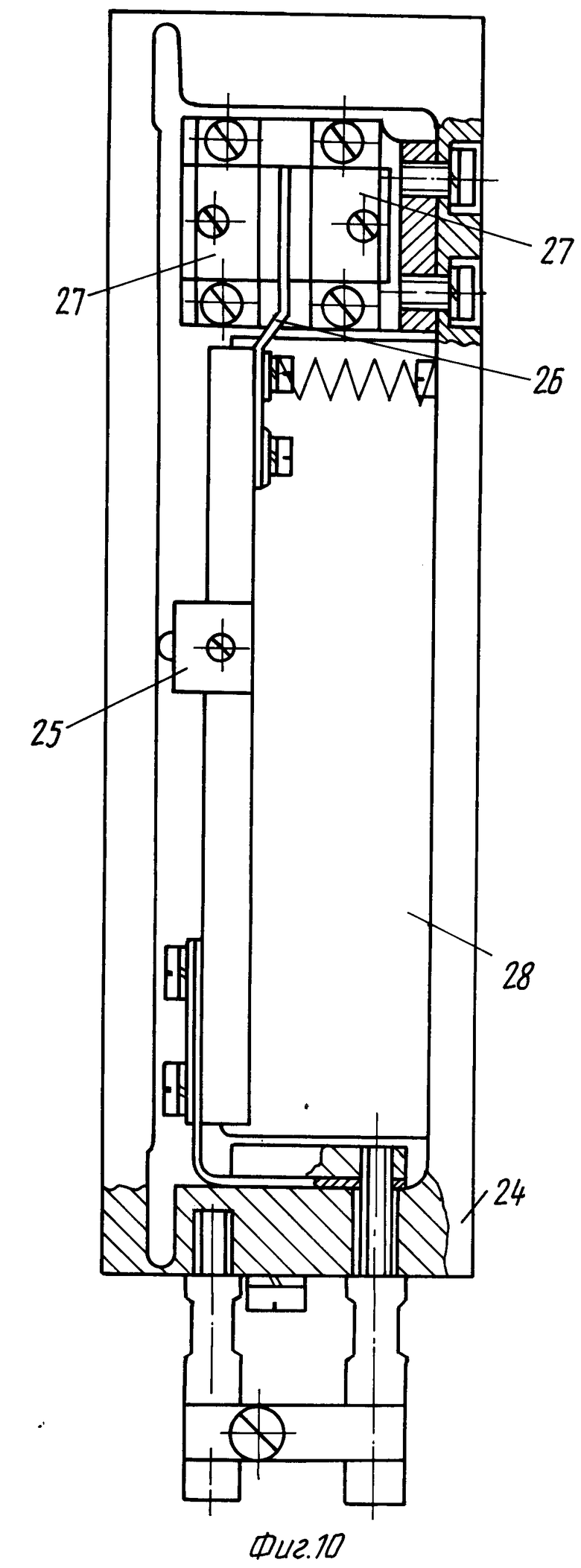
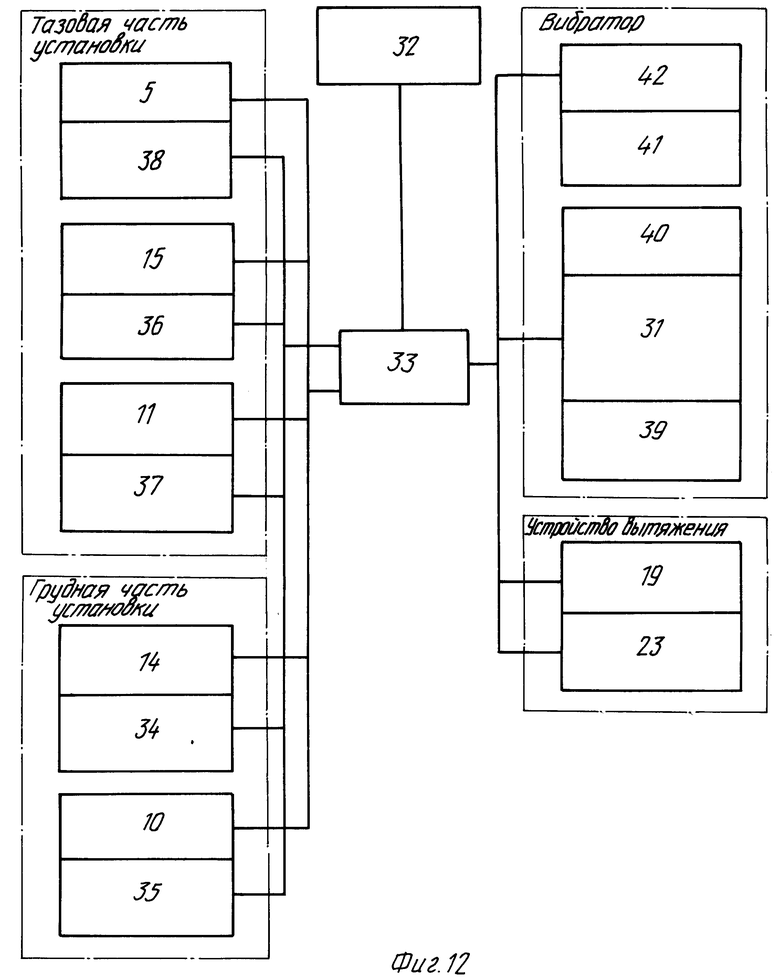
Датчик 23 усилия вытяжения содержит корпус 24, внутри которого расположены подпружиненный упор 25 со шторкой 26, расположенной между двумя катушками 27 индуктивности, и генератор 28 импульсов. Вибратор 29 со штоком 30 расположен на основании 16 между фигурными вилкообразными каретками 12 и 13 с возможностью продольного перемещения с помощью электропривода 31. Система управления электроприводами содержит управляющую ЭВМ 32, электрически связанную с электронным блоком 33, который связан с датчиками 34, 35, 36, 37, 38 положения грудной панели 1, тазовой панели 2, рам 8, 9 и плиты 3, соответственно, а также с датчиком 23 усилия вытяжения, с датчиками 39, 40 крайних положений продольного перемещения вибратора 29 и датчиком 41 частоты колебаний штока 30.
Электронный блок 33 электрически связан также с электроприводами 5, 10 и 11, 14 и 15, 19, 31, 42 поворота плиты 3, панелей 1, 2, рам 8, 9 кареток 12, 13, вибратора 29 и штока 30 соответственно.
Установку для лечения дистрофических заболеваний позвоночника используют следующим образом.
Установку подключают к электрической сети с помощью тумблера (на чертежах не показан) электронного блока 33 системы управления электроприводами. Подачу сетевого питания в систему управления электроприводами осуществляют нажатием кнопки "пуск" (на чертежах не показана) электронного блока 33.
Для размещения больного на установке, грудную панель 1 и тазовую панель 2 (или одну из них) устанавливают в рабочее положение в соответствии с разработанной программой лечения для данного больного для обеспечения безболевого положения.
С клавиатуры (на чертежах не показана) управляющей ЭВМ 32, электрически связанной с электронным блоком, осуществляют поворот панелей 1 и 2. С электронного блока 33 информация поступает на электроприводы 5, 10, 11, 14, 15 поворота и датчики 34, 35, 36, 37, 38 положения соответственно, которые контролируют угол поворота в соответствии с разработанной программой лечения данного больного. При достижении заданного угла поворот панелей 1 и 2 прекращается.
Затем больного размещают на установке таким образом, чтобы поясничный отдел позвоночника располагался между панелями 1 и 2, туловище - на грудной панели 1, а таз и ноги - на тазовой панели 2. С помощью средств крепления (на чертежах не показаны) - грудного и тазового корсетов - больного жестко закрепляют на установке.
Затем осуществляют вытяжение позвоночника с параметрами по разработанной программе данного больного. С клавиатуры (на чертежах не показана) управляющей ЭВМ 32, электрически связанной с электронным блоком 33 информация поступает на электропривод 19 кареток 12, 13 и датчик 23 усилия вытяжения, который контролирует усилие вытяжения в соответствии с разработанной программой лечения данного больного. Далее усилие вытяжения поддерживается в пределах заданной величины.
Измерение усилия вытяжения осуществляется следующим образом.
При включении с клавиатуры (на чертежах не показана), управляющей ЭВМ 32, начинает работать электропривод 19 кареток 12, 13, которые начинают одновременно перемещаться в разные стороны, в данном случае расходиться. Средства крепления (на чертежах не показаны) натягиваются, сопротивление расхождению панелей 1, 2 возрастает. Каретки 12, 13 останавливаются, а электропривод 19 продолжает работать и через гибкую связь 21 усилие перемещения передается на ползун 22, расположенный на нижней части каретки 13 и кинематически связанный с датчиком 23 усилия вытяжения. Усилие вытяжения может быть измерено в любом сечении на имеющемся ходе перемещения панелей 1, 2. Место положения сечений, в которых происходит измерение, зависит от телосложения больного, жесткости средств крепления и величины усилия вытяжения.
При приложении усилия сжатия к пружинной части корпуса 24 датчик 23 усилия вытяжения происходит изгиб пружинной части и перемещение упора 25, следствием которого является перемещение шторки (якоря) 26 между катушками 27 индуктивности. Датчик 23 усилия выдает частоту, пропорциональную изгибу пружинной части корпуса 24, который пропорционален приложенному усилию вытяжения. Частота с датчика 23 усилия поступает в электронный блок 33. По программе указанная частота пересчитывается к управляющей ЭВМ 32 в измеряемое усилие.
При необходимости одновременно с вытяжением позвоночника проводят воздействие вибраций на остистые и суставные отростки позвоночника с помощью штока 30 вибратора 29 по разработанной программе лечения данного больного.
Вибромассаж осуществляют следующим образом. С помощью ручного привода (на чертежах не показан) шток 30 подводят к заданной области поясничного отдела позвоночника.
Вибрационное воздействие осуществляют с клавиатуры (на чертежах не показана) управляющей ЭВМ 32, электрически связанной с электронным блоком 33. Датчик 41 частоты контролирует заданную частоту вибрации, передавая информацию в электронный блок 33. Электронный блок 33 управляет электроприводом 42 штока 30 вибратора 29, электроприводом 31 продольного перемещения вибратора 29 и электроприводом 42 штока 30. Датчики 39, 40 ограничивают продольное перемещение вибратора 29.
После окончания процедуры лечения нажимают на кнопку "сброс" (на чертежах не показана) электронного блока 33 и все запоминающие элементы системы управления установки приводятся в исходное положение.
Нажатием на кнопку "стоп" (на чертежах не показана) электронного блока 33 отключают питание системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТОЛ ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1991 |
|
RU2020904C1 |
| Стол для вытяжения позвоночника | 1980 |
|
SU955918A1 |
| Способ лечения больных с неврологическими синдромами поясничного остеохондроза | 1989 |
|
SU1703098A1 |
| СИСТЕМА КОРРЕКЦИИ ПОЗВОНОЧНИКА | 2008 |
|
RU2380075C1 |
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2005 |
|
RU2275941C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2262915C1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2265427C1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ГОРИЗОНТАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2011 |
|
RU2465882C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ КРОВАТЬ | 2009 |
|
RU2464002C2 |

Установка для лечения дистрофизических заболеваний позвоночника предназначена для вытяжения позвоночника и вибрационного воздействия на позвоночник. И может быть использовано для проведения вытяжения и вибрационных воздействия на позвоночник в автоматизированном режиме и исключения смещения больного при вытяжении в одну из сторон. Грудная панель установлена на раме с возможностью угловых поворотов вокруг своей продольной оси с помощью электропривода. Тазовая панель установлена на раме с возможностью угловых поворотов вокруг своей продольной оси с помощью электропривода. Тазовая панель состоит из плиты, установленной на поддоне с возможностью угловых поворотов вокруг своей вертикальной оси с помощью электропривода. Рамы установлены на фигурных вилкообразных каретках соответственно с возможностью угловых поворотов вокруг своих поперечных осей с помощью электроприводов соответственно. Каретки установлены на основании установки с возможностью продольных перемещений одновременно в разные стороны с помощью общего электропривода с механической передачей с двумя гибкими связями с непосредственным соединением. Установка содержит вибратор со штоком, установленный на основании между каретками с возможностью продольного перемещения с помощью электропривода. Установка содержит также систему управления поворотом панелей, вытяжением и работой вибратора. 2 з.п.ф-лы, 12 ил.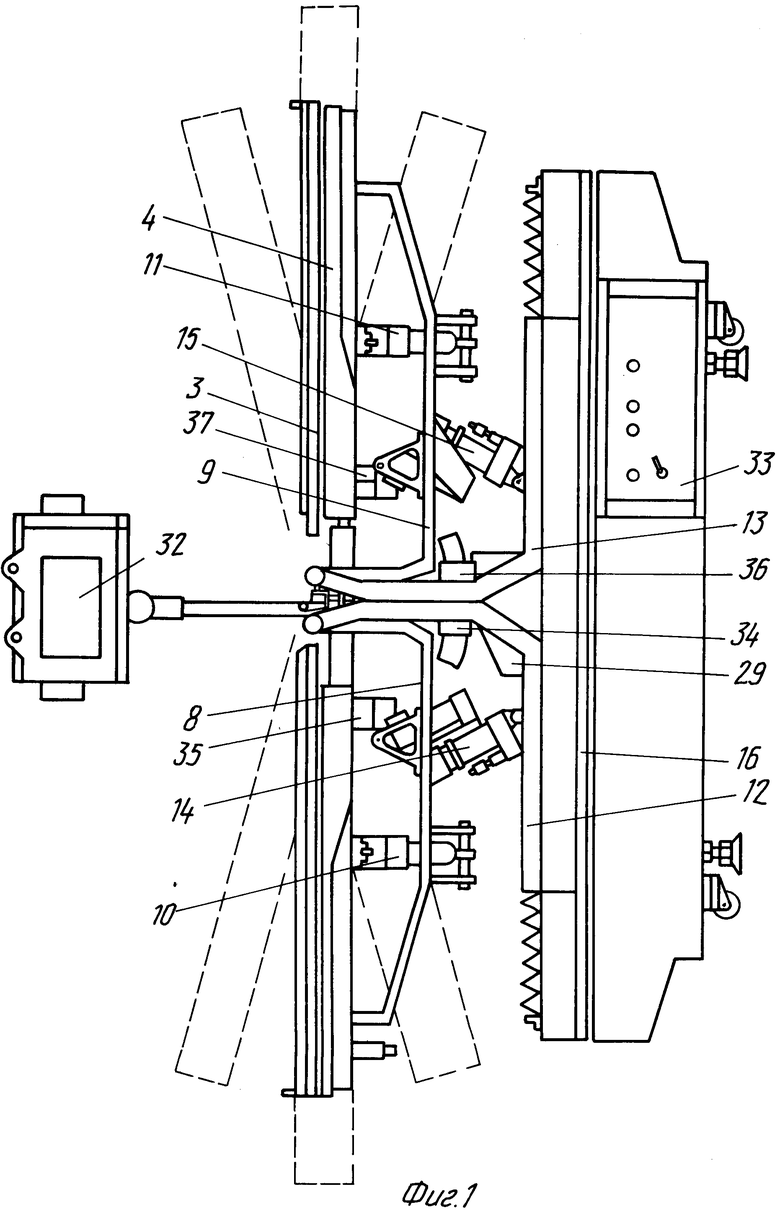
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стол для вытяжения | 1975 |
|
SU634642A3 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стол для вытяжения позвоночника | 1980 |
|
SU955918A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СТОЛ ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1991 |
|
RU2020904C1 |
