Изобретение относится к медицинской технике, а более конкретно - к устройствам для вибрационно-механического воздействия на мышечно-связочный аппарат позвоночника и его осевого вытяжения и может быть использовано для реабилитации, профилактики и лечения заболеваний у больных с неврологическими проявлениями грудно-поясничного остеоходроза позвоночника.
Известно устройство для вытяжения позвоночника, содержащее корпус, исполнительный механизм, приспособление для фиксации тела пациента, кинематически связанное с исполнительным механизмом при помощи гибкой связи, блок управления исполнительным механизмом, компенсатор перемещений, вибратор, расположенный между корпусом и роликом компенсатора перемещений [1].
Недостатки такого устройства:
а) узкие функциональные возможности, обусловленные тем, что оно не позволяет одновременно производить аппаратный вибромассаж области спины и тепловое воздействие в процессе вытяжения позвоночника;
б) не обеспечивает плавное дозированное вытяжение грудно-поясничного участка позвоночника.
Известно также устройство для массажа и вытяжения позвоночника, содержащее корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена нагревательным элементом и датчиком температуры, размещенные внутри корпуса блоки шейного и поясничного вытяжении, соединенные посредством гибких связей с соответствующими приспособлениями для фиксации тела пациента, узел возвратно-поступательного перемещения, выполненный в виде установленной на направляющих массажной тележки и кинематически связанной с ней цепной передачи, узел поджатия с датчиком уровня поджатия, размещенный на массажной тележке и выполненный в виде электромеханического винтового подъемного механизма, массажный узел, кинематически связанный с подъемным механизмом и выполненный в виде платформы с роликами-массажерами, установленными в прорези кушетки, вибратор, установленный на платформе, и программно-временной блок, входы которого соединены с выходами датчика температуры и уровня поджатия, а выходы подключены к нагревательному элементу и электроприводам вибратора и узлов поджатия и возвратно-поступательного перемещения [2].
Недостатки такого устройства:
а) сложность конструкции, обусловленная тем, что для реализации осевого вытяжения позвоночника требуется специальный блок поясничного вытяжения;
б) относительно низкая эффективность вытяжения позвоночника, обусловленная наличием трения между тазобедренным участком тела пациента и поверхностью кушетки.
Конструкция устройства [2] такова, что пациент во время лечения находится в горизонтальном положении, а для вытяжения (экстензии) используются внешние искусственные силы, которые, как правило, трудно дозировать. Более физиологичным является наклонный вид экстензии, когда для вытяжения позвоночника используется сила тяжести собственного тела пациента, к чему его ткани адаптированы. Пациента размещают на специальном столе, поверхность которого может наклоняться под определенным углом к горизонту. При такой экстензии вытяжение происходит под действием силы, равной, а чаще всего меньшей веса тела, что сводит возможность для осложнений во время процедуры до минимума. Кроме того, путем увеличения наклона создается возможность для постепенного увеличения силы вытяжения, что снижает возбудимость мышечных и связочных проприорецепторов [3].
Одна из конструкций для наклонной экстензии описана в [4], являющейся наиболее близким изобретением к предлагаемому по технической сущности и схемному решению.
Такое устройство, выбранное в качестве прототипа, содержит корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена нагревательным элементом и приспособлением для фиксации тела пациента, размещенные внутри корпуса массажный узел, выполненный в виде платформы с роликами-массажерами, узел поджатия, выполненный в виде рамы с механизмом поворота рамы и шарнирно связанной со станиной, узел возвратно-поступательного перемещения, установленный на раме узла поджатия и кинематически связанный с массажным узлом, узел наклона корпуса, установленный на станине и кинематически связанный с корпусом, и программно-временной блок, выходы которого подключены к нагревательному элементу и электроприводам узлов поджатия, возвратно-поступательного перемещения и наклона корпуса, при этом корпус шарнирно связан одним концом с неподвижной опорой, выполненной в виде массивной станины.
Недостатки такого устройства:
а) велика вероятность опрокидывания устройства, вызванная его неустойчивостью в наклонном положении корпуса (особенно при наличии на нем пациента). При наклоне корпуса центр тяжести устройства смещается вверх, а площадь его опоры ограничена неподвижной станиной, на которую корпус опирается лишь одним концом;
б) относительно низкая эффективность вытяжения позвоночника, обусловленная наличием трения между тазобедренным участком тела пациента и поверхностью кушетки;
в) относительно большая потребляемая устройством мощность, что вызвано тем, что для наклона корпуса, а также рамы с массажным узлом и узлом возвратно-поступательного перемещения приходится преодолевать значительные моменты сил (силы, обеспечивающие наклон, приложены в точках, близких к оси поворота корпуса);
г) слабая адаптация движущегося массажного узла к форме поверхности тела пациента, что снижает эффективность массажа.
Изобретение направлено на достижение следующих технических результатов:
а) повышение устойчивости устройства в наклонном положении путем увеличения площади опоры его корпуса;
б) снижение потребляемой устройством мощности путем изменения кинематической схемы узла наклона корпуса и приложения усилий наклона к точкам корпуса, более удаленным от оси его поворота;
в) повышение эффективности вытяжения позвоночника путем исключения трения между тазобедренным участком тела пациента и поверхностью кушетки;
г) повышение адаптации траектории движения массажного узла к форме поверхности тела пациента путем увеличения степеней свободы платформы с роликами-массажерами.
Указанные технические результаты достигаются в устройстве для массажа и вытяжения позвоночника, содержащем корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена нагревательным элементом и приспособлением для фиксации тела пациента, размещенные внутри корпуса массажный узел, выполненный в виде платформы с роликами-массажерами, узлы поджатия, возвратно-поступательного перемещения и наклона корпуса и программно-временной блок, выходы которого подключены к нагревательному элементу и электроприводам узлов поджатия, возвратно-поступательного перемещения и наклона корпуса, в котором корпус размещен одним концом на неподвижных, например резиновых, опорах, а другим концом - на опорной раме, шарнирно соединенной с корпусом и снабженной роликами перемещения по опорной поверхности корпуса, узел наклона корпуса выполнен в виде телескопического механизма, первый и второй концы которого шарнирно соединены соответственно с корпусом и опорной рамой, на корпусе размещен датчик угла наклона корпуса, вал которого кинематически связан с опорной рамой, программно-временной блок содержит регулятор наклона корпуса, вход и выход которого подключены соответственно к выходу датчика угла наклона корпуса и входу электропривода узла наклона корпуса.
Кроме того, кушетка выполнена в виде неподвижной "грудной" секции, связанной с приспособлением для фиксации тела пациента, и подвижной "тазобедренной" секции, установленной на роликах и с возможностью возвратно-поступательного перемещения по направляющим.
Также платформа массажного узла шарнирно соединена с поджимным узлом в плоскости их перемещения, а оси роликов-массажеров шарнирно соединены с платформой в плоскостях, перпендикулярных направлению их перемещения.
Основными признаками, отличающими заявляемое устройство от прототипа, являются:
а) корпус размещен одним концом на неподвижных, например резиновых, опорах, а другим концом - на опорной раме, шарнирно соединенной с корпусом и снабженной роликами перемещения по опорной поверхности корпуса;
б) узел наклона корпуса выполнен в виде телескопического механизма, первый и второй концы которого шарнирно соединены соответственно с корпусом и опорной рамой;
в) на корпусе размещен датчик угла наклона корпуса, вал которого кинематически связан с опорной рамой;
г) программно-временной блок содержит регулятор наклона корпуса, вход и выход которого подключены соответственно к выходу датчика угла наклона корпуса и входу электропривода узла наклона корпуса;
д) кушетка выполнена в виде неподвижной "грудной" секции, связанной с приспособлением для фиксации тела пациента, и подвижной "тазобедренной" секции, установленной на роликах и с возможностью возвратно-поступательного перемещения по направляющим;
е) платформа массажного узла шарнирно соединена с поджимным узлом в плоскости их перемещения, а оси роликов-массажеров шарнирно соединены с платформой в плоскостях, перпендикулярных направлению их перемещения.
Наличие указанных признаков обеспечивает соответствие всей совокупности существенных признаков заявляемого устройства условию патентоспособности "новизна". При этом не обнаружены устройства, в которых указанные технические результаты достигаются аналогичной совокупностью существенных признаков.
Сопоставление заявляемого устройства не только с прототипом, но и с другими техническими решениями в данной и смежных областях науки и техники показало, что в них отсутствуют признаки, отличающие заявляемое устройство от прототипа.
Следовательно, заявляемое устройство соответствует условию патентоспособности "изобретательский уровень".
Сущность изобретения поясняется чертежами, на которых приведены:
на фиг.1 - общий вид устройства, включая кинематическую схему кушетки;
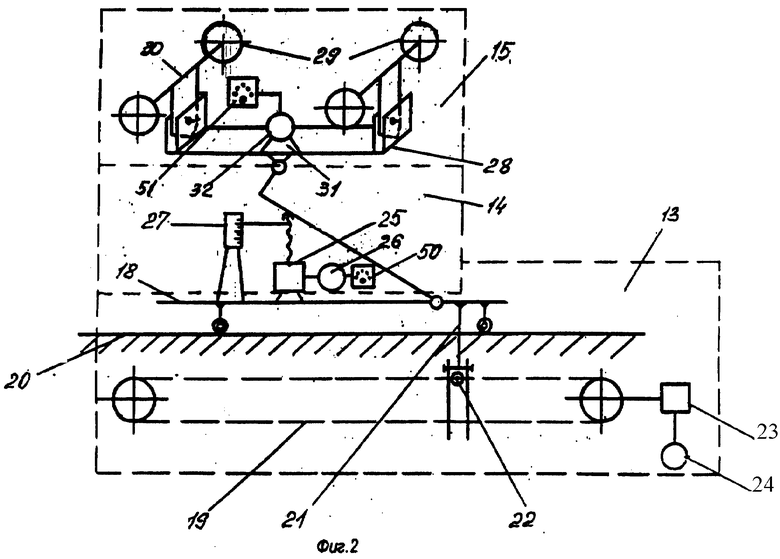
на фиг.2 - кинематические схемы узлов возвратно-поступательного перемещения, поджатия и массажного узла;
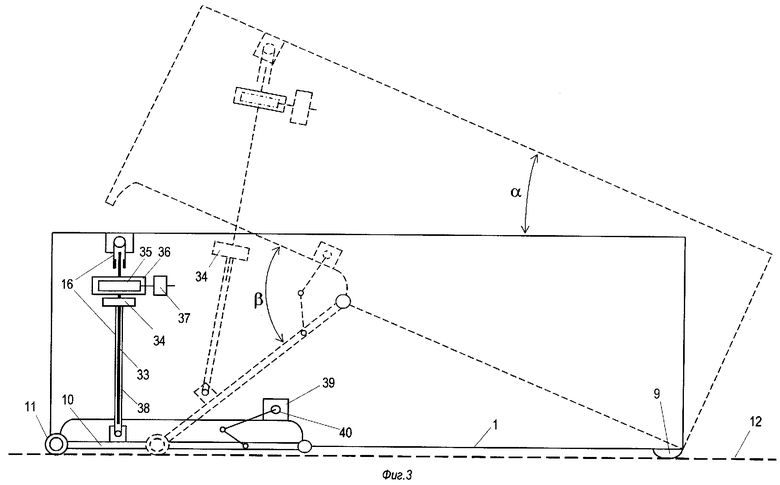
на фиг.3 - схема, поясняющая работу узла наклона корпуса;
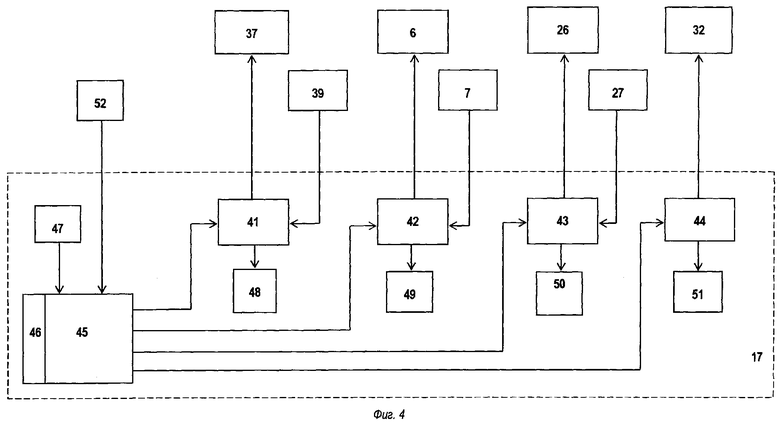
на фиг.4 показаны электрические связи между блоками устройства.
Устройство для массажа и вытяжения позвоночника (фиг.1) содержит полый корпус 1, верхняя рабочая поверхность которого выполнена в виде установленной на основании 2 кушетки с продольной прямоугольной прорезью (не показана), соответствующей расположению оси позвоночника пациента.
Кушетка состоит из неподвижной "грудной" 3 и подвижной "тазобедренной" 4 секций. Неподвижная секция 3 снабжена приспособлением 5 для фиксации тела пациента, нагревательным элементом 6 и датчиком температуры 7. Подвижная секция 4 снабжена роликами 8 и установлена с возможностью продольного возвратно-поступательного перемещения по направляющим (не показаны), прикрепленным к основанию 2.
Корпус 1 размещен одним концом на неподвижных, например резиновых, опорах 9, а другим концом - на опорной раме 10, шарнирно соединенной с корпусом 1 и снабженной роликами 11 перемещения по опорной поверхности 12 корпуса 1.
Внутри корпуса 1 размещены узел 13 возвратно-поступательного перемещения, узел 14 поджатия, массажный узел 15 (фиг.2), узел 16 наклона корпуса 1 (фиг.3) и программно-временной блок 17 (фиг.4).
Узел 13 возвратно-поступательного перемещения выполнен в виде массажной тележки 18 и кинематически связанной с ней цепной передачи 19. Массажная тележка 18 установлена с возможностью возвратно-поступательного перемещения по направляющим рельсам 20 и через жесткую связь 21 и кулачок 22 соединена с цепной передачей 19. Цепная передача 19 через червячный механизм 23 связана с электроприводом 24.
Узел 14 поджатия размещен на массажной тележке 18 и выполнен в виде винтового подъемного механизма 25 с электроприводом 26 и снабжен датчиком 27 уровня поджатия.
Массажный узел 15 выполнен в виде платформы 28 с роликами-массажерами 29, размещенными в прорезях неподвижной секции 3 кушетки, Платформа 28 шарнирно связана с подъемным механизмом 25 в плоскости перемещения узлов 13-15, а оси 30 роликов-массажеров 29 шарнирно соединены с платформой 28 в плоскостях, перпендикулярных направлению перемещения узлов 13-15.
На платформе 28 жестко закреплен вибратор 31 с электроприводом 32.
Узел 16 наклона корпуса 1 (фиг.3) выполнен в виде телескопического механизма, один конец которого шарнирно соединен с корпусом 1, а другой конец - с опорной рамой 10. Телескопический механизм содержит пару "винт - гайка" с винтом 33 и гайкой 34, червячную передачу с червяком 35 и червячным колесом 36 и электропривод 37. Гайка 34 жестко соединена с трубкой 38, внутри которой размещен винт 33, жестко соединенный с червячным колесом 36. Червяк 35 установлен на валу электропривода 37.
На корпусе 1 жестко закреплен датчик 39 угла наклона корпуса 1, вал 40 которого кинематически связан с опорной рамой 10.
Программно-временной блок 17 содержит регуляторы 41-44 соответственно угла наклона корпуса 1, температуры кушетки, уровня поджатия роликов-массажеров 29 и вибрации роликов-массажеров 29, распределитель 45 управляющих сигналов с таймером 46 и пульт 47 управления устройством.
Регуляторы 41-44 снабжены соответствующими цифровыми указателями 48-51 и предназначены для поддержания заданных режимов работы устройства. Входы регуляторов 41-43 подключены к выходам соответственно датчика 39 угла наклона корпуса 1, датчика 7 температуры кушетки и датчика 27 уровня поджатия. Выходы регуляторов 41-44 подключены соответственно ко входу электропривода 37 угла наклона корпуса 1, нагревательному элементу 6 и электроприводам соответственно 26 узла 14 поджатия и 32 вибратора 31.
Приспособление 5 для фиксации тела пациента выполнено в виде грудного пояса (бандажа).
В устройстве предусмотрен аварийный режим работы, для обеспечения которого имеется находящаяся в руках пациента аварийная кнопка 52.
Работа устройства для массажа и вытяжения позвоночника определяется программой, задаваемой в его программно-временном блоке 17.
До начала сеанса вибромассажа и вытяжения позвоночника пациента в распределителе 44 программно-временного блока 17 устанавливаются следующие заранее задаваемые величины:
- длительность полной процедуры,
- максимальные и минимальные углы наклона корпуса 1, которым соответствуют определенные силы вытяжения,
- уровень поджатия роликов-массажеров 29,
- амплитуда и частота вибрации роликов-массажеров 29 (если она не противопоказана пациенту).
Пациента с поясничным или пояснично-крестцовым остеоходрозом укладывают на кушетку и плотно пристегивают к ее неподвижной секции 3 с помощью приспособления 5 на уровне подмышечных впадин. При этом тазобедренный участок тела пациента располагается на подвижной секции 4 кушетки.
С пульта 47 управления запускается программно-временной блок 17, который, в свою очередь, включает электроприводы 24, 26, 32. При этом массажная тележка 18 приходит в движение и начинает осуществлять возвратно-поступательные перемещения. Подъемный механизм 25 поднимает платформу 28 с роликами-массажерами 29. В итоге ролики-массажеры 29 начинают перемещаться в пределах прорези кушетки, массажируя спину пациента по линии расположения оси его позвоночника.
Одновременно начинает работать вибратор 31 и включается нагревательный элемент 6. Заданная температура обогрева поддерживается регулятором 42 благодаря обратной связи, включающей в себя датчик 7 температуры.
После предварительного механического вибромассажа (разминания) позвоночника пациента в течение 1-2 мин (при котором происходит 5-6 проходов роликов-массажеров 29) в соответствии с программой включается узел 16 наклона корпуса 1, который плавно устанавливает угол αmax наклона кушетки, соответствующий заданному максимальному значению силы Fвыт.max вытяжения.
Для этого по сигналу с регулятора 41 запускается электропривод 37, который начинает вращать червяк 35 и находящийся в зацеплении с ним червячное колесо 36. Вращение последнего передается на винт 33. Вращаясь, винт 33 "выдвигается" из трубки 38 телескопического механизма, что приводит к повороту корпуса 1 вокруг неподвижных опор 9 и соответствующему наклону кушетки с пациентом.
При повороте корпуса 1 опорная рама 10 вращается вокруг оси своего шарнира, а ее ролики 11 "прокатываются" по опорной поверхности 12 в направлении неподвижных опор 9.
Поворот корпуса 1 (наклон кушетки) контролируется датчиком 39 угла наклона, выходные сигналы которого поступают на вход регулятора 41, где сравниваются с заданным значением угла наклона кушетки.
Следует отметить, что датчик 39 измеряет не угол α наклона кушетки по отношению к опорной поверхности 12, а угол β разворота опорной рамы 10 по отношению к корпусу 1. Так как при осуществлении наклона опорная рама 10 разворачивается на угол, больший, чем соответствующий угол наклона кушетки, т.е. β>α, достигается возможность более точного контроля наклона кушетки. Так как величины α и β взаимосвязаны, возможна градуировка (тарировка) шкалы соответствующего цифрового указателя 48 в значениях угла α наклона кушетки.
Сила вытяжения позвоночника может быть рассчитана по формуле [3]:
Fвыт.=КРпsinα,
где К - коэффициент трения между тазобедренным участком тела пациента и кушеткой,
Рп - вес пациента.
Благодаря тому, что секция 4 кушетки выполнена подвижной, трение между тазобедренным участком тела пациента и кушеткой практически равно нулю и поэтому величина К стремится к 1. Значения Fвыт. могут быть заранее подсчитаны для пациентов с различным весом и представлены в виде таблицы. Обычно значения Fвыт. выбираются в пределах 20-50 кг [3], тогда значения α для данного устройства находятся в пределах 15-25°.
В устройстве указанная выше максимальная сила Fвыт.max вытяжения поддерживается заданное время, определяемое таймером 46 программно-временного блока 17. После этого происходит плавный сброс максимальной силы вытяжения до минимального значения Fвыт.min (если оно задано) путем снижения угла наклона кушетки (корпуса 1) до соответствующего значения αmin.
По истечении времени выдержки минимальной силы вытяжения (которое определяется таймером 46) повторяется следующий цикл плавного установления максимального значения силы вытяжения по заданной программе.
Если минимальное значение силы вытяжения не задано (т.е. дано равным нулю), изменение силы вытяжения происходит от максимального значения до нулевого и обратно, При этом заданное значение максимальной силы вытяжения также поддерживается в течение времени, задаваемой распределителем 45 сигналов с таймером 46.
В процессе массажа и вытяжения позвоночника регуляторами 41-44 программно-временного блока 17 задаются и поддерживаются в заданных режимах уровень поджатия и амплитуда и частота вибрации роликов-массажеров 29, угол наклона корпуса 1 и температура кушетки. При этом соответствующие значения указанных величин индицируются в цифровых указателях 48-51.
При необходимости пациент нажатием на кнопку 52 может остановить работу устройства. При этом распределитель 45 формирует сигналы, переводящие регуляторы 41-44 в аварийный режим. В результате происходит возврат исполнительных механизмов в начальную позицию, т.е. останавливается возвратно-поступательное движение массажной тележки 18, прекращается работа вибратора 31, устанавливается нижний (нулевой) уровень роликов-массажеров 29, угол наклона корпуса 1 снижается до нуля.
Таким образом, предложенная совокупность существенных признаков устройства позволяет:
а) повысить его устойчивость в наклонном положении путем увеличения площади опоры его корпуса;
б) обеспечить его мобильность, возможность оперативной переустановки в помещении благодаря наличию роликов 11 и отсутствию массивной станины;
в) снизить потребляемую устройством мощность благодаря перегруппировке сил, действующих на корпус при осуществлении его наклона;
г) повысить эффективность вытяжения позвоночника путем исключения трения между тазобедренным участком тела пациента и поверхностью кушетки;
д) повысить адаптацию траектории движения массажного узла к форме поверхности тела пациента путем увеличения степеней свободы платформы с роликами-массажерами.
Заявителем разработан и начинает выпускаться описанный вариант устройства для массажа и вытяжения позвоночника, что подтверждает его соответствие условию патентоспособности "промышленная применимость".
ИСПОЛЬЗОВАННЫЕ ИСТОЧНИКИ
1. Патент РФ №2090175. Устройство для вытяжения позвоночника, МПК А 61 Н 1/02. Бюл. №26, 1997 г.
2. Патент РФ №2195243. Устройство для вытяжения позвоночника. МПК А 61 Н 1/02. Бюл. №36, 2002 г.
3. Бонев Л. Экстензионная терапия / Руководство по кинезитерапии. Медицина и физкультура. София. 1978, с.177-181.
4. Патент РФ №2026051. Устройство для механизированного массажа, МПК А 61 Н 1/02. Бюл. №1, 1995 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2013 |
|
RU2539421C2 |
| МЕХАНОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА ДЛЯ МАССАЖА И ГРАВИТАЦИОННОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2012 |
|
RU2512959C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2007 |
|
RU2336069C1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2265427C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2008 |
|
RU2386428C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2006 |
|
RU2320165C1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2001 |
|
RU2195243C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2005 |
|
RU2275941C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОГО МАССАЖА ПОЗВОНОЧНИКА | 2013 |
|
RU2549674C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА | 2006 |
|
RU2308257C1 |
Изобретение относится к медицинской технике, а более конкретно - к устройствам для вибрационно-механического воздействия на мышечно-связочный аппарат позвоночника и его осевого вытяжения и может быть использовано для реабилитации, профилактики и лечения заболеваний у больных с неврологическими проявлениями грудно-поясничного остеоходроза позвоночника. Техническим результатом является повышение устойчивости устройства в наклонном положении, снижение потребляемой мощности, а также повышение эффективности вытяжения позвоночника и адаптации траектории движения массажного узла к форме поверхности тела пациента. Устройство содержит корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена нагревательным элементом и приспособлением для фиксации тела пациента, размещенные внутри корпуса массажный узел, выполненный в виде платформы с роликами-массажерами, узлы поджатия, возвратно-поступательного перемещения и наклона корпуса и программно-временной блок, выходы которого подключены к нагревательному элементу и электроприводам узлов поджатия, возвратно-поступательного перемещения и наклона корпуса, корпус размещен одним концом на неподвижных, например резиновых, опорах, а другим концом - на опорной раме, шарнирно соединенной с корпусом и снабженной роликами перемещения по опорной поверхности корпуса, узел наклона корпуса выполнен в виде телескопического механизма, первый и второй концы которого шарнирно соединены соответственно с корпусом и опорной рамой, на корпусе размещен датчик угла наклона корпуса, вал которого кинематически связан с опорной рамой, программно-временной блок содержит регулятор наклона корпуса, вход и выход которого подключены соответственно к выходу датчика угла наклона корпуса и входу электропривода узла наклона корпуса. Кроме того, кушетка выполнена в виде неподвижной "грудной" секции, связанной с приспособлением для фиксации тела пациента, и подвижной "тазобедренной" секции, установленной на роликах и с возможностью возвратно-поступательного перемещения по направляющим, также платформа массажного узла шарнирно соединена с поджимным узлом в плоскости их перемещения, а оси роликов-массажеров шарнирно соединены с платформой в плоскостях, перпендикулярных направлению их перемещения. 2 з.п. ф-лы, 4 ил.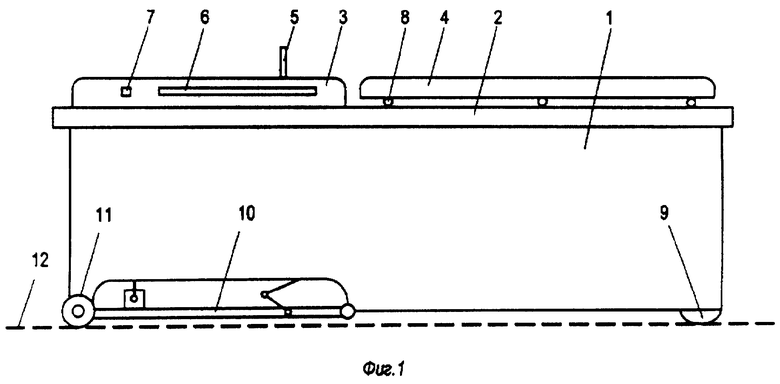
| RU 20026051 C1, 09.01.1995 | |||
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2001 |
|
RU2195243C1 |
| Способ рафинирования и обезвоживания камфары | 1929 |
|
SU18480A1 |
| АППАРАТ ДЛЯ ТРЕХМЕРНОГО ЛЕЧЕБНОГО ВОЗДЕЙСТВИЯ НА ПОЗВОНОЧНИК | 1997 |
|
RU2193384C2 |
| US 5282835 А, 01.02.1994 | |||
| СПОСОБ НАНЕСЕНИЯ ВЕЩЕСТВ НА ОБРАБАТЫВАЕМУЮ ПОВЕРХНОСТЬ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2131307C1 |
| DE 3201334 A1, 28.07.1983 | |||
| DE 3104832 A1, 20.01.1983 | |||
| DE 2004932 A1, 25.11.1971. | |||

