Изобретение относится к информационным системам комплексной диагностики технического состояния объектов подвижного состава железнодорожного транспорта, а именно контроля перекоса осей колесных пар и износа колес по их образующей поверхности, массы и неравномерности загрузки по осям и сторонам вагона, негабаритности подвижного состава, а также инспекции цельности пломб на крышках заливных горловин цистерн при движении поезда и может быть использовано в диспетчерских и др. железнодорожных пунктах контроля.
Известны наземные диагностические комплексы [1], содержащие вихретоковую систему [2] для контроля перекоса осей колесных пар и износа колес по их образующей поверхности, состоящую из высокочастотного генератора, коммутатора, четырех локальных матричных вихретоковых преобразователей, размещенных попарно в двух поперечных сечениях максимальных левого и правого превышений уровней поверхностей катания рельсовых нитей пути и закрепленных на внутренних сторонах шеек нитей пути, при этом катушки индуктивности матричных преобразователей включены в колебательные контуры, связанные через коммутатор с выходом генератора, анализирующего блока, ЭВМ, соединенный с выходами матричных преобразователей через анализирующий блок, и регистратора, и оптоэлектронную систему [3] видеоконтроля негабаритности подвижного состава, состоящую из П-образных ворот, инфракрасных датчиков и телевизионной камеры, размещенных на стойках и перекладине ворот, видеомагнитофона, ЭВМ, соединенной входной шиной с датчиками и камерой через видеомагнитофон, и регистратора.
Функциональные возможности этих комплексов ограничены, а точность и достоверность контроля недостаточны.
Вихретоковая система обладает высокими эксплуатационной надежностью и помехоустойчивостью к механическим воздействиям и агрессивным средам, а также локальностью контроля, обеспечивающей одновременное измерение в одной точке движущегося объекта контроля несколько геометрических параметров. Высокая локальность зоны контроля достигается взаимным сближением катушек к оси симметрии матричного преобразователя. Однако такая его конструкция вызывает сильную электромагнитную связь между катушками локального матричного преобразователя, которую полностью не удается устранить одной коммутацией. Остаточная электромагнитная связь катушек - величина переменная и порождается тем, что возбужденный током колебательный контур наводит вихревые токи не только в электропроводящем объекте контроля, но и в катушках индуктивности колебательных контуров, не возбужденных током, индуктивность и емкость которых меняются от изменения параметров объекта, что обусловливает внесение погрешности на характеристики возбужденного током колебательного контура.
Неудовлетворительные точность и достоверность контроля оптоэлектронной системы обусловлены тем, что открытые оптические поверхности инфракрасных датчиков подвержены воздействию осадков и световой (солнечной) засветки.
Наиболее близким техническим решением к заявляемому представляется наземный диагностический контрольно-вычислительный комплекс, содержащий систему диагностики состояния колес по их образующей поверхности, состоящую из инфракрасных датчиков, снабженных светофильтрами и работающих на отражение, и магнитофона, связанного с инфракрасными датчиками, тензометрическую систему контроля массы груза и неравномерности загрузки, состоящую из тензодатчиков, измеряющих вертикальные статические нагрузки колес на рельсы, и усилителя, соединенного с выходами тензодатчиков, и оптоэлектронную систему контроля негабаритности подвижного состава или выступающих элементов за его габарит, состоящую из инфракрасных датчиков, работающих на прерывание, и видеомагнитофона, связанного с выходами инфракрасных датчиков, интерфейс, ЭВМ, соединенную входом с выходами систем через интерфейс, и регистратор [4] .
Основным достоинством комплекса являются его широкие функциональные возможности, позволяющие одновременно контролировать состояние объектов подвижного состава на его ходу в едином времени.
Точность и достоверность контроля геометрических параметров колесных пар инфракрасными датчиками низкие вследствие сильной засоренности зоны контроля каплями воды, нефтепродутов, наличия тумана, обледенения и др. взвесей (песок, пыль, снег и др.), поднимаемых с поверхности земляного полотна скоростным напором движущегося поезда, причем перекосы осей колесных пар не контролируется.
Точность и достоверность контроля массы груза и неравномерности загрузки по осям и сторонам вагона тензодатчиками, установленными нормально горизонту, низкие из-за того, что помимо действия нормальной (вертикальной) составляющей нагрузки на каждое колесо тележки вагона действует и тангенциальная (горизонтальная) составляющая нагрузки, вызванная смещением по объему вагона груза (например, сыпучего, жидкого), раскачивающего вагон в плоскости поперечного сечения пути.
Инфракрасные датчики габаритов также не обеспечивают удовлетворительную точность и достоверность контроля из-за воздействия на открытые оптические поверхности осадков и др.
Сущность изобретения состоит в том, что в наземный диагностический контрольно-вычислительный комплекс (КВК), содержащий вихретоковую систему контроля перекоса осей колесных пар и износа колес по образующей поверхности, тензометрическую систему контроля массы груза и неравномерности загрузки по осям и сторонам вагона, состоящую из весоизмерительной платформы с контрольным участком пути четырех тензодатчиков, закрепленных по два на шейках рельсов в двух поперечных сечениях участка пути платформы, и последовательно включенных связанного входами с выходами тензодатчиков усилителя, аналого-цифрового преобразователя и видеоконтрольного аппарата, оптоэлектронную систему видеоконтроля негабаритности груза и цельности пломбы горловины цистерны, состоящую из П-образных ворот, на стойках и перекладине которых размещены инфракрасные датчики и телевизионная камера со светозащитными фильтрами, видеомагнитофона и блока обработки информации, выходами подключенного к видеомагнитофону и входу блока индикации, а входом - к выходу блока сопряжения, входы которого подключены к выходам инфракрасных датчиков и телевизионной камеры, и предназначенную для обработки и хранения поступающей с упомянутых систем информации электронную вычислительную машину, связанную через интерфейс с выходом тензометрической системы контроля массы груза и неравномерности загрузки по осям и сторонам вагона, образованным выходом соответствующего аналого-цифрового преобразователя, и с выходом оптоэлектронной системы видеоконтроля негабаритности груза и цельности пломбы горловины цистерны, образованным выходом блока обработки информации, первая вышеупомянутая система колес выполнена дополнительно с возможностью контроля перекоса осей колесных пар и включает в себя высокочастотный генератор, коммутатор, через локальных матричных вихретоковых преобразователя, размещенных попарно в двух разноуровневых поперечных сечениях максимальных левого и правого превышений поверхностей катания рельсовых нитей прямолинейного участка пути и закрепленных на внутренних сторонах шеек рельсов пути, электронные ключи, каждый из которых выполнен в виде двух встречно и параллельно соединенных тиристоров, включенных между соответствующими катушкой индуктивности матричного вихретокового преобразователя и конденсатором, образующими колебательный контур, причем управляющие электроды тиристоров каждого из ключей объединены и подключены через коммутатор к выходу высокочастотного генератора, блок обработки информации, входами связанный с выходами матричных вихретоковых преобразователей, а выходом - с входом аналого-цифрового преобразователя, один из выходом которого соединен с входом видеоконтрольного аппарата, а другой выход является выходом системы, подключенным к электронной вычислительной машине, тензометрическая система контроля массы груза и неравномерности загрузки по осям и сторонам вагона снабжена двумя дополнительными тензодатчиками, при этом балки установлены между рельсами в поперечных сечениях контрольного участка пути и жестко закреплены на шейках рельсов в непосредственно близости от мест размещения основных тензодатчиков, причем дополнительные тензодатчики закреплены на балках и выходами связаны с входами усилителя. Оптоэлектронная система видеоконтроля негабаритности груза и цельности пломбы может быть снабжена навесом, установленным над П-образными воротами.
Техническим результатом изобретения является повышение безопасности движения поездов за счет обеспечения комплексной диагностики состояния подвижного состава, осуществляемой измерительными средствами с высокими метрологическими и эксплуатационными показателями.
На фиг.1 приведена структурная схема наземного КВК; на фиг.2 - размещение локального матричного ВТП на шейке рельса; на фиг.3 - схема включения катушек матричного ВТП в колебательный контур; на фиг.4 - весоизмерительная платформа с элементами контроля; на фиг.5 - П-образные ворота с каналами ИК-датчиков и камеры; на фиг.6 - фрагмент размещения контрольных участков в путевом проходе.
Наземный КВК (фиг. 1) содержит вихретоковую систему контроля перекоса осей колесных пар и износа колес по их образующей поверхностей, тензометрическую систему 2 контроля массы груза и неравномерности загрузки по осям и сторонам вагона, оптоэлектронную систему 3 видеоконтроля негабаритности груза и цельности пломб на заливных крышках цистерн и последовательно соединенные интерфейс 4, ЭВМ 5 с обобщенным программным обеспечением и регистратор 6, при этом системы 1 - 3 выходами соединены с входом интерфейса 4.
Система 1 состоит из высокочастотного генератора 7, коммутатора 8, четырех локальных матричных ВТП 9, 10, 11, 12, блока 13 обработки, соединенного входами с выходами ВТП, связанных входами через коммутатор 8 с выходом генератора 7, и последовательно соединенных АЦП 14 и ВКА 15. Каждый из ВТП 9-12 выполнен в виде трех катушек 16, 17, 18 индуктивности, одна из которых, например 16 - произвольной формы намотки, две другие - вытянуто-прямоугольной и треугольной форм намоток. Катушки 16 расположена в плоскости, перпендикулярной плоскости, в которой расположены две другие катушки 17, 18 (фиг. 2), образуя совместно с ними ортоганальную Г-образную электромагнитную матрицу. Катушка 17 треугольной намотки вписана в плане вершинами в три угла внутреннего контура катушки 18 вытянуто-прямоугольной намотки, а линия пересечения плоскостей катушки 16 и катушек 17, 18 проходит за пределами их площадей и вдоль большого основания катушки 16 вытянуто-прямоугольной намотки. Матричные ВТП 9-12 размещают попарно в двух разноуровневых поперечных сечениях прямолинейного участка пути и закрепляют их к внутренним сторонам шеек рельсовых нитей торцами совмещенных катушек 17, 18, противоположными торцами, к которым примыкают катушки 16, при этом положение ВТП должно быть таким, чтобы плоскость, в которой лежит катушка 16, была параллельна плоскости торца колеса.
Для увеличения чувствительности контроля катушки 16-18 каждого ВТП 9-12 (фиг. 3) включены в колебательные контуры, настроенные с помощью емкостей 19 в резонанс частоты генератора 7. Колебательные контуры снабжены электронными ключами 20, включенными в электрическую цепь между катушкой 16 (17, 18) и емкостью 19 каждого колебательного контура. Когда на колебательный контур не подается ток генератора 7, то электрическая цепь этого контура разорвана ключом 20 и его индуктивность и емкость становятся пассивными к электромагнитному полю, наводимому колебательным контуром, возбужденным током в данный момент. Размыкание элементов контура значительно снижает их паразитные электромагнитные связи с катушками других контуров. В качестве электронного ключа 20 может быть, например, сборка двух встречно-параллельно включенных тиристоров типа КУ с объединенными управляющими электродами, связанными с выходом коммутатора 8. Электронный ключ 20 обладает малым сопротивлением, что не снижает существенно добротность колебательного контура, и свойством разрывать электрическую цепь при его обесточивании.
Коммутатор 8 предназначен для параллельно чередующегося подключения колебательных контуров, в которые включены катушки 16 - 18 матричных ВТП 9-12, к генератору 7, т.е. по одной катушке одновременно всех ВТП, затем по следующей катушке и т. д. с заданной частотой коммутации. Блок 13 снабжен локальным программным обеспечением и предназначен для усиления выходных сигналов ВИП 9-12, формирования опорного напряжения и вычисления измеряемых параметров ходовых частей подвижного состава в соответствии с алгоритмом, заложенным в приданной программе, и представления их в виде аналогичного напряжения. Блок 13 выходом подключен к входу АЦП 14, предназначенного для преобразования напряжения из аналоговой формы в цифровую с дальнейшим его наблюдением на экране ВКА 15.
Система 2 (фиг. 4) состоит из весоизмерительной платформы 21 с контрольным участком пути, источника 22 питания (фиг.1), четырех основных Т-датчиков 23, 24, 25, 26, закрепленных по два на шейках рельсовых нитей в двух поперечных сечениях участка пути платформы, отстоящих друг от друга на расстоянии S = (1,4-2,0) м, двух балок 27, 28, двух дополнительных Т-датчиков 29, 30, закрепленных на балках 27, 28, последовательно соединенных усилителя 31, входами связанного с выходами основных и дополнительных Т-датчиков 23-26, 29, 30, подключенных к источнику питания 22, и последовательно соединенных АЦП 32 и ВКА 33. Балки 27, 28 установлены между рельсами участка пути платформы 21 в поперечных сечениях и жестко закреплены к шейкам рельсов в непосредственной близости от сечений, где размещены основные Т-датчики 23, 24 и 25, 26. Величина несовмещения сечений размещения основных Т-датчиков 23-26 и балок 27, 28 обусловлена тем, чтобы зоны жесткого соединения балок с рельсовыми нитями не препятствовали деформации шеек рельсовых нитей от нагрузки в зонах, где закреплены основные Т-датчики 23-26. Основные Т-датчики 23-26 измеряют вертикальные (нормальные) нагрузки PНi колес на рельсы пути, а дополнительные Т-датчики 29, 30 - горизонтальные (тангенциальные) нагрузки PТj колес. Равнодействующая нагрузка P выражается уравнением
i = 1, 2, 3, 4, j = 1, 2.
Предложенное размещение T-датчиков 23-28, 29, 30 позволяет измерять нагрузки P на четыре колеса тележки вагона квазиодновременно, причем при вычислении величин P, действующих на колеса одной пары тележки, используются значения PH1,2 Т-датчиков 23, 24 и PT1 Т-датчика 29, а при вычислении P, действующей на колеса другой пары тележки вагона, используются значения PH3,4 T-датчиков 25, 26 и PT2 Т-датчика 30. Пределы величины S приняты исходя из реальных расстояний между осями колесных пар тележек локомотивов и вагонов. Т-датчики 23-26, и 29 и 30 закрепляют на рельсах и балках клеем типа, например, "Цианкрин".
АЦП 32 предназначен для преобразования сигнала из аналоговой в цифровую форму с дальнейшим его наблюдением на экране ВКА 33.
Возможно дублирование Т-датчиков и балок для контроля распределения нагрузки на колеса противоположной тележки вагона, что эффективно на пунктах загрузки вагонов.
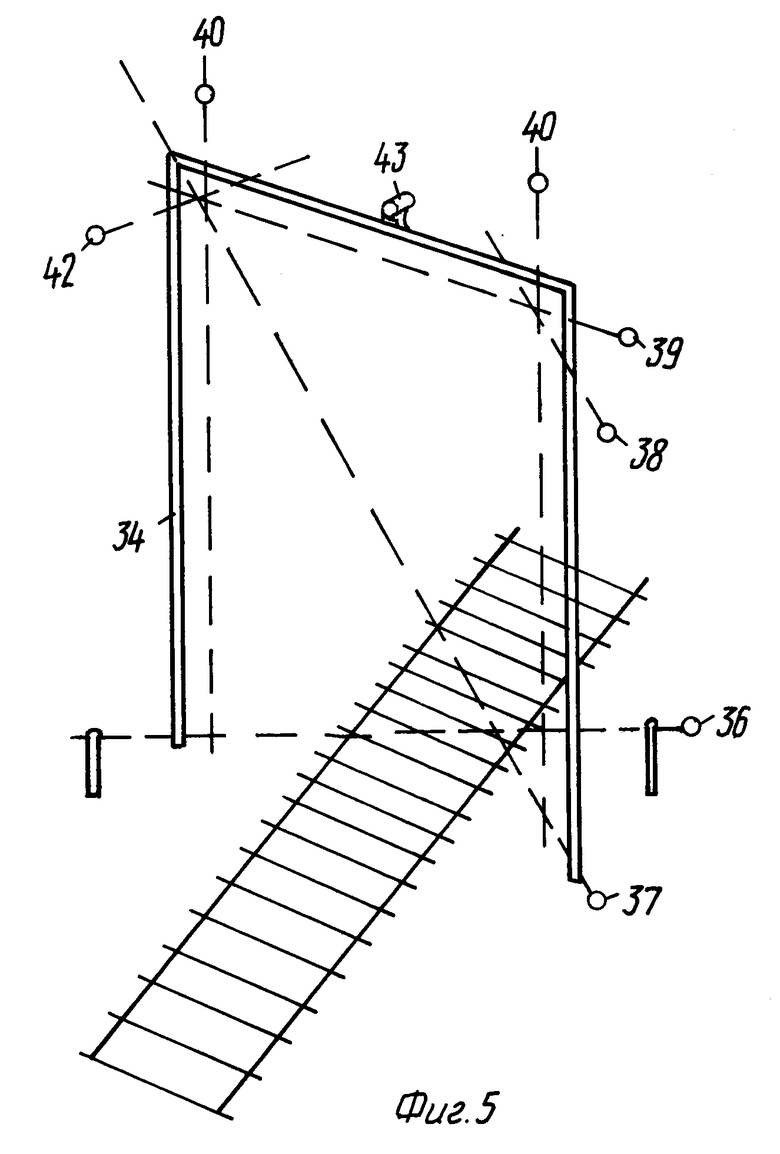
Система 3 состоит из П-образных ворот 34 (фиг.5 навес не показан), установленных над рельсовым полотном, ИК-датчика 36 наличия состава, ИК-датчика 37 счета вагонов, пяти ИК-датчиков 38, 39, 40, 41, 42 контроля наружного габарита состава, камеры 43, а также блока 44 сопряжения (фиг.1), блока 45 обработки информации с локальным программным обеспечением, ВКА 46 и видеомагнитофона 47. К входам блока 44 сопряжения подключены выходы ИК-датчиков 36-42 и камеры 43, а выход блока 44 соединен с входной шиной блока 45, к выходам которого подключены ВКА 46 и видеомагнитофон 47. ИК-датчики 36-42 выполнены в виде идентичных оптоэлектронных каналов, каждый из которых состоит из инфракрасного излучателя 48 и фотоприемника 49, направленных встречно вдоль своих оптических осей. Оптические элементы ИК-датчиков 36-42 и камеры 43 снабжены светозащитными фильтрами (на фиг. не показано), обеспечивающими защиту от засветки искусственных источников света (прожекторов), размещенных под навесом.
Первый оптоэлектронный канал ИК-датчика 36 предназначен для контроля наличия вагона или состава (сцепленных между собой вагонов) и проложен между стоек ворот в направлении, накрестлежащем к продольной оси рельсового полотна в плане на расстоянии от поверхности катания рельсов, обеспечивающем зондирование светового потока в уровне рам кузова вагона. Такое расположение канала ИК-датчика 36 обусловлено требованием, при котором световой поток ИК-датчика 36 должен быть перекрыт постоянно от первого до последнего вагона состава даже тогда, когда состав остановится и межвагонный просвет скажется в створе ворот 34, в этом случае световой поток будет перекрываться одновременно задним, например, правым углом рамы вагона и передним левым углом рамы следующего вагона. Для размещения излучателя 48 и фотоприемника 49 канала ИК-датчика 36 по разные стороны от створа ворот 34 и рельсового полотна установлены опоры (на фиг. не показано). Второй оптоэлектронный канал ИК-датчика 37 предназначен для счета вагонов и проложен по диагонали в плоскости створа ворот 34. Диагональное расположение канала датчика 37 в створе ворот 34 позволяет обеспечить надежное прерывание (размыкание) световода потока между излучателем 48 и фотоприемником 49 канала ИК-датчика 37 даже в случае, когда вагон без бортов (полувагон) и груз на нем сконцентрирован на ограниченном участке пола вагона, и замыкание светового потока ИК-датчика 37 межвагонным просветом, т. е. когда в плоскости створа ворот 34 находится узел сцепки вагона.
Пять следующих оптоэлектронных каналов ИК-датчиков 38-42 предназначены для контроля габарита подвижного состава и проложены на внутренних сторонах стоек и перекладины ворот 34 по контуру допустимого габарита груза. Излучатели 48 и фотоприемники 49 каналов ИК-датчиков 38-42 установлены на кронштейнах (на фиг. не показано), закрепленных жестко на стойках и перекладине ворот 34, с возможностью изменения их положения относительно кронштейнов в случаев изменения размеров контролируемого объема.
Камера 43 предназначена для визуального контроля состояния крепления и типа груза и инспекции цельности пломбы на крыше заливной горловины цистерны и шарнирно закреплена на кронштейне с возможностью фиксирования ее положения и сканирования в плоскости створа ворот 34 и в вертикальной плоскости, проходящей вдоль рельсового пути. Фиксация положения или сканирование камеры 43 осуществляются через блок наведения (на фиг. не показано) по командам блока 45 в соответствии с данными программного обеспечения. В качестве блока наведения может быть применена турель, обеспечивающая перемещение камеры 43 по азимуту и углу места.
Блок 44 сопряжения предназначен для формирования единого информационного сигнала, несущего информацию с ИК-датчиков 36-42 и камеры 43, его передачи в блок 45, обеспечения стробирования выходных сигналов ИК-датчиков 38-42 по выходному сигналу ИК-датчика 36, счета вагонов по выходным сигналам ИК-датчика 37, фиксации положения и сканирования камеры 43 и формирования стабилизированного напряжения питания ИК-датчиков 36-42 и камеры 43.
Блок 45 предназначен для регистрации, обработки и хранения информации, получаемой с блока 44 сопряжения в виде единого информационного сигнала, а также отображения информации на экране ВКА 46 в соответствии с данными локального программного обеспечения. Запись видеоизображения камеры 43 осуществляется на видеомагнитофон 47.
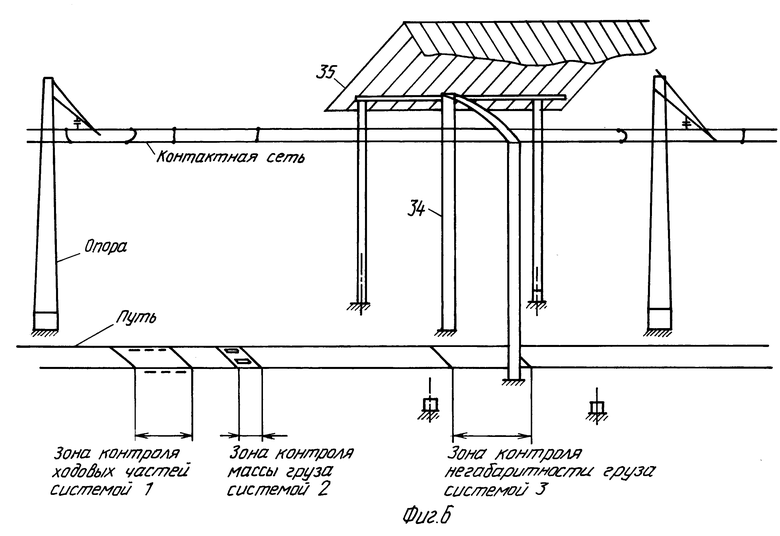
ЭВМ 5 (фиг.1) предназначена для обработки и хранения информации, получаемой с систем 1, 2, 3 через интерфейс 4. Выходами систем 1, 2, 3 являются выходы соответственно АЦП 14, 32 и блока 45 обработки информации. Обобщенное программное обеспечение представляет собой информационно-справочную систему, в которую заносят и хранятся в ней все данные о контролируемых объектах подвижного состава. В качестве ЭВМ 5 может быть IВМ, а регистратора 6 - монитор. На фиг. 6 показан фрагмент размещения участков пути с зонами контроля: ходовых частей подвижного состава с элементами системы 1 (фиг.2), массы груза с элементами весоизмерительной платформы 21 (фиг.4) системы 2 и негабаритности груза с элементами П-образных ворот (фиг.5) и навесом 35 системы 3 в путевом проходе. Навес 35 обеспечивает защиту элементов системы 3 от воздействия на них осадков.
Техническим результатом изобретения является повышение безопасности движения поездов за счет обеспечения комплексной диагностики параметров объектов подвижного состава на его ходу.
Диагностический КВК работает следующим образом.
Системы 1, 2, 3, интерфейс 4, ЭВМ 5 и регистратор 6 включают в сеть 220 В и настраивают их на рабочий режим, обеспечивающий высокочастотное питание матричных ВТП 9-12 от генератора 7 системы 1, питание Т-датчиков 23-26, 29, 30 от источника 22 системы 2 и ИК-датчиков 36-42, камеры 43 от блока 44 сопряжения системы 3. По первой информации, поступающей в ЭВМ 5 с датчиков или ВТП систем 1, 2, 3 определяют направление движения поезда в путевом проходе.
Работа матричных ВТП 9-12 системы 1 основана на возбуждении электромагнитным полем колебательных контуров в контролируемом токопроводящем объекте вихревых токов, вызывающих в катушках 16-18 ВТП 9-12 электропроводящую силу, которая зависит от степени изменения положения и формы контролируемого объекта. В соответствии с алгоритмом, заложенным в локальное программное обеспечение системы 1, в блоке 13 обработки осуществляется разделение и считывание контролируемых параметров ходовых частей: перекос осей колесных пар, износ гребня и поверхности катания колеса. По временному сдвигу моментов достижения нарастающих напряжений на катушках 16 каждого из пар ВТП 9, 10 или 11-12 опорного напряжения, выбранного на линейном участке выходных характеристик катушек 16, имеющих одинаковую крутизну, судят о перекосе осей колесных пар на ходу поезда. По измеренным текущим величинам толщины гребня колеса и зазора между образующей гребня колеса и катушками 17, 18 ВТП 9-12 с учетом эталонных их значений судят об износе гребня и поверхности катания колеса.
Работа Т-датчиков 23-26, 29, 30 основана на преобразовании деформации (растяжения или сжатия) тензоэлементов Т-датчиков, закрепленных на контролируемом объекте, в электрический сигнал, прямо пропорциональный изменению сопротивлений тензоэлементов. По степени изменения электрического сигнала (напряжения) Т-датчиков судят о составляющих PНi и PТi, действующих на рельсы, и по выражению (1) определяют полную нагрузку P каждого колеса одной и другой тележки вагона. На экране ВКА 33 масса груза и неравномерность загрузки вагона отображаются в физической величине.
Работа ИК-датчиков 36-42 основана на прерывания светового потока контролируемым объектом, которое обеспечивает формирование сигнала с уровня логического "0" до уровня логической "1". При входе состава в створ П-образных ворот 34 световой поток канала ИК-датчика 36 наличия состава прерывания и его сигнал поступает в блок 44 сопряжения, который дает разрешение на анализ выходов ИК-датчиков 38-42 и прохождение видеосигнала с камеры 43 на входы ВКА 46 и видеомагнитофон 47. При прерывании светового потока канала ИК-датчика 37 его сигнал поступает в блок 44 сопряжения, который дает разрешение анализировать габариты каждого конкретного вагона путем стробирования сигналов с выходов ИК-датчиков 38-42.
В случае нарушения какого-либо из участков очертания габарита погрузки на выходе соответствующего ИК-датчика 38-42, в зоне действия которого оказался данный участок, меняется уровень выходного сигнала, что фиксируется в блоке 45 путем программной обработки единого информационного сигнала. Кроме того в памяти блока 45 осуществляется запись о нарушении габарита погрузки, номер ИК-датчика, зафиксировавшего нарушение, и номер вагона. По номеру ИК-датчика и текущему времени определяют поперечное сечение габарита вагона, в котором возникло нарушение. По видеосигналу камеры 43 наблюдают характер нарушения, размещение груза на полу вагона и цельность пломб на крышках горловин вагонов. Информация с камеры 43 записывается на видеомагнитофон 47.
Наряду с отображением на экранах ВКА 15, 33 и 46 систем 1, 2, 3 измеренной информации она сможет вся или интересующие ее фрагменты с помощью обобщенной программы поступать в ЭВМ 5 для более длительного запоминания, хранения и необходимого преобразования в соответствии с данными обобщенной программы, а также параллельного дублирования информации на экране регистратора 6. Записанная информация в ЭВМ 5 передается в полном объеме (комплексе), например, телетайпом дежурному по станции и на пункты контроля по маршруту следования поезда для сведения или принятия решения.
Техническим результатом изобретения является повышение безопасности движения поездов за счет комплексности диагностики состояния объектов подвижного состава измерительными средствами с высокими метрологическими и эксплуатационными показателями.
Литература
1. Клюев В.В. и др. Стационарный комплекс контроля негабаритности груза и диагностики ходовых частей подвижного состава /В кн.: Повышение эффективности работы ж.д. транспорта дальневосточного региона.-Хабаровск; 1995, с.17.
2. RU, патент, 2085425, 1997.
3. RU, патент, 2066282, 1996.
4. Лозинский С. М. и др. Система контроля технического состояния подвижного состава на ходу поезда. Автоматика, телемеханика и связь.-1994, N 1, с. 7-9.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИКИ КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1997 |
|
RU2108936C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2085425C1 |
| УСТРОЙСТВО ДЛЯ МНОГОПАРАМЕТРОВОГО КОНТРОЛЯ ОБЪЕКТОВ ПУТЕЙ СООБЩЕНИЯ | 1996 |
|
RU2082640C1 |
| УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2066646C1 |
| СТЕНД ДЛЯ ПОВЕРКИ МНОГОПАРАМЕТРОВЫХ ВИХРЕТОКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПАРАМЕТРОВ ЖЕЛЕЗНОДОРОЖНЫХ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1996 |
|
RU2082641C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИЗНОСА ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА | 1996 |
|
RU2085424C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗНОСА И ЗИГЗАГА КОНТАКТНОГО ПРОВОДА ЭЛЕКТРИЧЕСКОЙ СЕТИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1999 |
|
RU2155678C1 |
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РЕЛЬЕФА ПОВЕРХНОСТИ ИЗНОСА ГОЛОВКИ РЕЛЬСА | 2000 |
|
RU2172268C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2167778C2 |
Содержащаяся в комплексе система, выполненная с возможностью контроля перекоса осей колесных пар, включает в себя высококачественный генератор, коммутатор, четыре локальных матричных вихретоковых преобразователя, закрепленных на внутренних сторонах шеек рельсов пути, блок обработки информации, связанный с вихретоковыми преобразователями и через аналого-цифровой преобразователь с видеоконтрольным аппаратом. Тензометрическая система контроля массы груза и неравномерности загрузки по осям и сторонам вагона состоит из весоизмерительной платформы с контрольным участком пути с установленными между рельсами балками и тензодатчиками. Оптоэлектронная система видеоконтроля негабаритности груза и цельности пломбы горловины цистерны состоит из П-образных ворот, на которых размещены инфракрасные датчики и телевизионная камера, видеомагнитофона, блока индикации, блока обработки информации, подключенного выходом к видеомагнитофону, и блока сопряжения, подключенного к выходам инфракрасных датчиков и телевизионной камеры. Электронная вычислительная машина предназначена для обработки и хранения поступающей с упомянутых систем информации. Технический результат - повышение точности и достоверности контроля технического состояния железнодорожного подвижного состава. 1 з.п.ф-лы, 6 ил.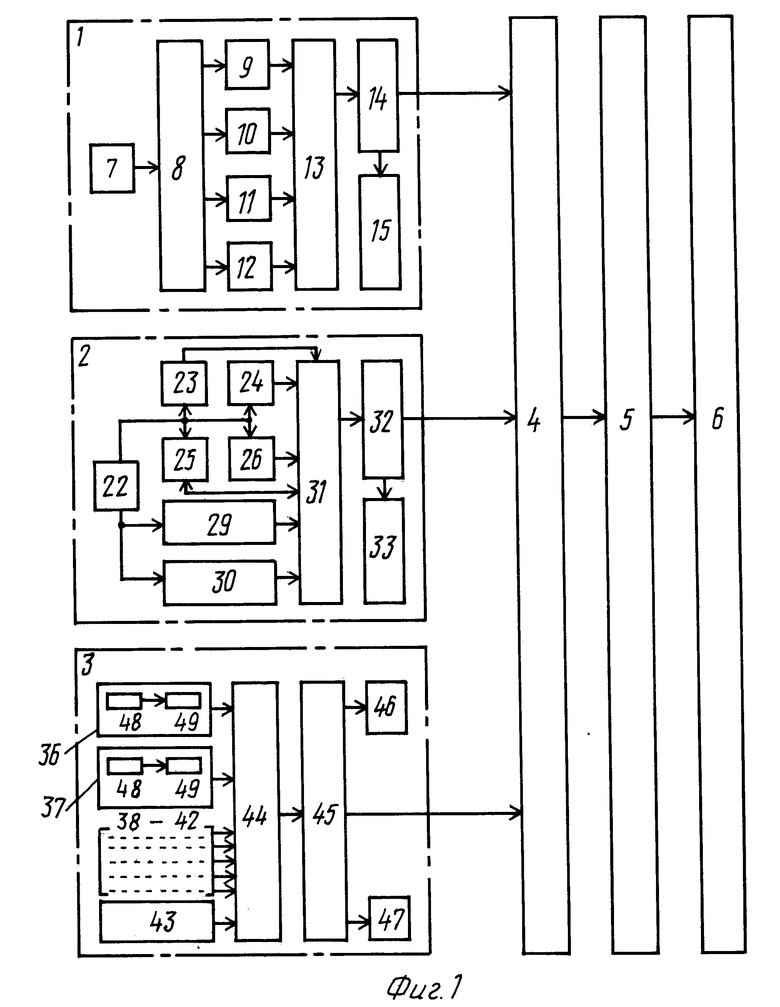
загрузки по осям и сторонам вагона, образованным выходом соответствующего аналого-цифрового преобразователя, и с выходом оптоэлектронной системы видеоконтроля негабаритности груза и цельности пломбы горловины цистерны, образованным выходом блока обработки информации, отличающийся тем, что первая упомянутая система колес выполнена дополнительно с возможностью контроля перекоса осей колесных пар и включает в себя высокочастотный генератор, коммутатор четыре локальных матричных вихретоковых преобразователя, размещенных попарно в двух разноуровневых поперечных сечения максимальных левого и правого превышений поверхностей катания рельсовых нитей прямолинейного участка пути и закрепленных на внутренних сторонах шеек рельсов пути, электронные ключи, каждый из которых выполнен в виде двух встречно и параллельно соединенных тиристоров, включенных между соответствующими катушкой индуктивности матричного вихретокового преобразователя и конденсатором, образующими колебательный контур, причем управляющие электроды тиристоров каждого из ключей объединены и подключены через коммутатор к выходу высокочастотного генератора, блок обработки информации, входами связанный с выходами матричных вихретоковых преобразователей, а выходом - с входом аналого-цифрового преобразователя, один из выходов которого соединен с входом видеоконтрольного аппарата, а другой выход является выходом системы, подключенным к электронной вычислительной машине, тензометрическая система контроля массы груза и неравномерности
загрузки по осям и сторонам вагона снабжена двумя балками и двумя дополнительными тензодатчиками, при этом балки установлены между рельсами в поперечных сечениях контрольного участка пути и жестко закреплены на шейках рельсов в непосредственной близости от мест размещения основных тензодатчиков, причем дополнительные тензодатчики закреплены на балках и выходами связаны с входами усилителя.
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2085425C1 |
| RU 2066282, 10.09.96 | |||
| Лозинский С.М | |||
| и др | |||
| Система контроля технического состояния подвижного состава на ходу поезда | |||
| Автоматика, телемеханика и связь | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
