Изобретение относится к железнодорожной автоматике, а именно к системам диагностики технического состояния объектов железнодорожного транспорта, и может быть использовано для контроля параметров износа ходовых частей, перекоса осей колесных пар в колесе и изгиба вала колесной пары движущегося поезда.
Известны способы определения параметров износа ходовых частей подвижного состава, заключающиеся в пропуске подвижного состава по прямолинейному эталонному участку пути, оснащенному датчиками перемещений, определению толщины гребней колес и расстояний от датчиков до образующих поверхностей гребней, которые используют в качестве параметров износа [1].
Функциональные возможности этих способов ограничены определением износа гребня колеса. Точность и достоверность контроля низкие, так как на результат измерения влияют кроме измеряемого износа гребней и износ остальных частей образующей поверхности колеса, а также перекос оси колесной пары в колее.
Наиболее близким техническим решением к заявляемому является способ определения параметров износа ходовых частей подвижного состава, заключающийся в следующем: создают на прямолинейном эталонном участке пути как минимум в двух его поперечных сечениях перепады уровней рельсовых нитей относительно горизонта в одну и другую стороны, жестко закрепляют в этих поперечных сечениях с внутренней стороны одной и другой рельсовых нитей на фиксированном расстоянии от их головок датчики перемещений, пропускают по участку подвижной состав, измеряют величину смещения колесной пары в поперечном сечении пути, толщины гребней колес и зазор между датчиком вершиной гребня колеса, находящегося на рельсе верхнего уровня, и по измеренным значениям судят о параметрах износа [2].
Известно устройство, реализующее способ [2], содержащее последовательно соединенные высокочастотный генератор, коммутатор, четыре матричных вихретоковых датчика перемещений; блоки обработки и памяти измерительной информации и регистратор [3].
Точность и достоверность контроля этим способом и устройством, реализующим способ, низкие из-за множества необоснованных измерительных операций, снижающих эффективность технического решения. Например, нет необходимости определять параметры износа поверхности катания колеса, находящегося на рельсе нижнего уровня, по смещению вершины его гребня в радиальном направлении поперечного сечения пути, так как токопроводящие боковая поверхность головки рельса и поверхность скольжения гребня колеса контактируют между собой, что вызывает перераспределение в их материалах электромагнитного поля вихревых токов, наводимых внешним электромагнитным полем вихретокового датчика, а это в свою очередь искажает результат измерения. Необоснованно также судить об износе гребня колеса, находящегося на рельсе верхнего уровня, по измеренной величине смещения колесной пары в осевом направлении поперечного сечения пути, так как боковая поверхность головки рельса не контактирует с поверхностью скольжения гребня верхнего колеса, которая может иметь неравномерный износ. В этой измерительной операции будет отслеживаться рельеф износа гребня противоположного колеса этой пары, гребень которого касается головки рельса нижнего уровня. Лишние действия способа усложняют конструкцию датчика, ухудшают метрологические характеристики известного решения и снижают надежность.
Сущность заявляемого технического решения состоит в том, что на прямолинейном эталонном участке пути создают как минимум в двух его поперечных сечениях перепады уровней поверхностей катания рельсовых нитей относительно горизонта в одну и другую стороны, жестко закрепляют в этих поперечных сечениях с внутренней стороны рельсов колеи датчики перемещений, пропускают по участку сначала средство на колесных парах эталонных размеров и измеряют смещение колесной пары в осевом направлении одного из поперечных сечений участка пути и ее ширину между поверхностями скольжения гребней и запоминают эти значения, затем по участку пропускают подвижной вагон (состав) с рабочими колесными парами и измеряют смещение каждой колесной пары в осевом направлении каждого поперечных сечений пути, смещение колес, находящихся на рельсах верхнего уровня, в радиальных направлениях обоих поперечных сечениях пути и дополнительно текущую ширину колесной пары между поверхностями скольжения ее гребней и по полученным результатам измерений образцового средства и подвижного состава определяют параметры износа колесной пары и изгиб ее вала, а время начала пересечения каждым колесом пары поперечного сечения участка пути, в котором датчики установлены у одного и другого рельсов колеи, фиксируют.
Сущность устройства, реализующего способ, заключается в том, что оно содержит последовательно соединенные высокочастотный генератор, первый коммутатор, параллельно включенные как минимум 2N матричных вихретоковых датчика перемещений, где N - число сечений с максимальными перепадами уровней рельсов, второй коммутатор, четыре детектора, блок обработки информации, блок памяти с таймером и регистратор, каждый из датчиков состоит из "n" идентичных и лежащих в одной плоскости катушек индуктивности, одноименные оси которых образуют общую продольную ось датчика, выполненного в виде линейки, при этом в каждом из заданных поперечных сечений участка пути установлено с внутренней стороны рельсов колеи по два датчика перемещений, по одному из которых ориентированы параллельно внутренним торцевым поверхностям колес, причем один из них расположен у рельса нижнего уровня, а два других датчика ориентированы перпендикулярно внутренним торцевым поверхностям колес, причем оба этих датчика расположены у рельсов верхнего уровня под гребнями колес, выходы первого коммутатора связаны через датчики с входами второго коммутатора, к четырем выходам которого подключены входы четырех детекторов, а выходы детекторов связаны через блоки обработки и памяти с регистратором;
блок обработки включает в себя четыре компенсатора, две схемы опорного напряжения, семь вычитателей, шесть усилителей и один сумматор, первые выходы первого и третьего компенсаторов соединены с первыми входами первого и четвертого вычитателей, к вторым входам которых подключены первый и второй выходы первой схемы опорного напряжения, а выходы этих вычитателей связаны с входами первого и четвертого усилителей, вторые выходы первого и третьего компенсаторов соединены с первыми входами второго и пятого вычитателей, к вторым входам которых подключены выходы первого и четвертого усилителей соответственно, кроме того, их выходы соединены с первым и вторым входами сумматора, а выходы второго и пятого вычитателей связаны с входами второго и пятого усилителей, выходы второго и четвертого компенсаторов соединены с первыми входами третьего и шестого вычитателей, к вторым входам которых подключены выходы второго и пятого усилителей, а выходы третьего и шестого вычитателей связаны с входами третьего и шестого усилителей соответственно, выход сумматора соединен с первым входом седьмого вычитателя, к второму входу которого подключен выход второй схемы опорного напряжения, выходы всех усилителей, а также выход седьмого вычитателя являются информационными выходами блока обработки.
Техническим результатом изобретения является обеспечение безопасности движения поездов за счет усовершенствования динамических способа и средства диагностики состояния ходовых частей, позволяющих расширить объем и резко повысить качество измерительной информации.
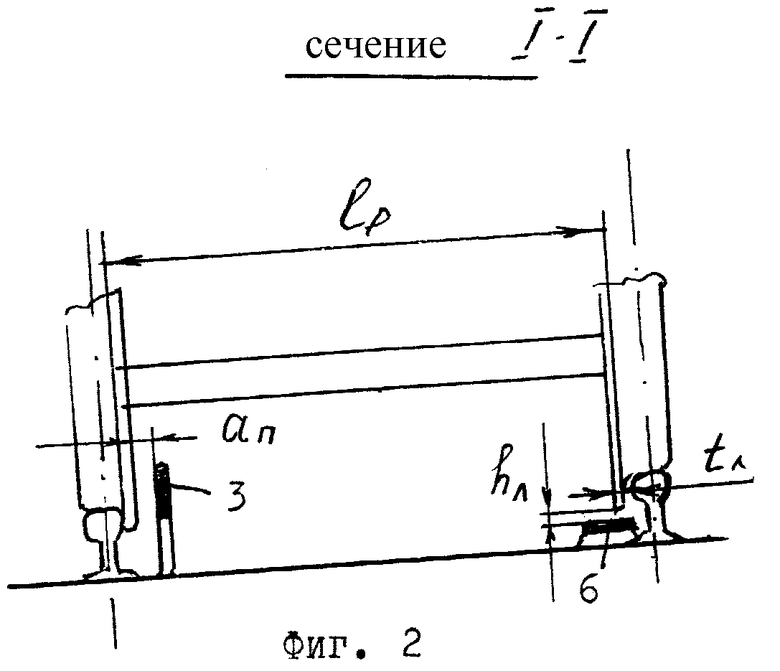
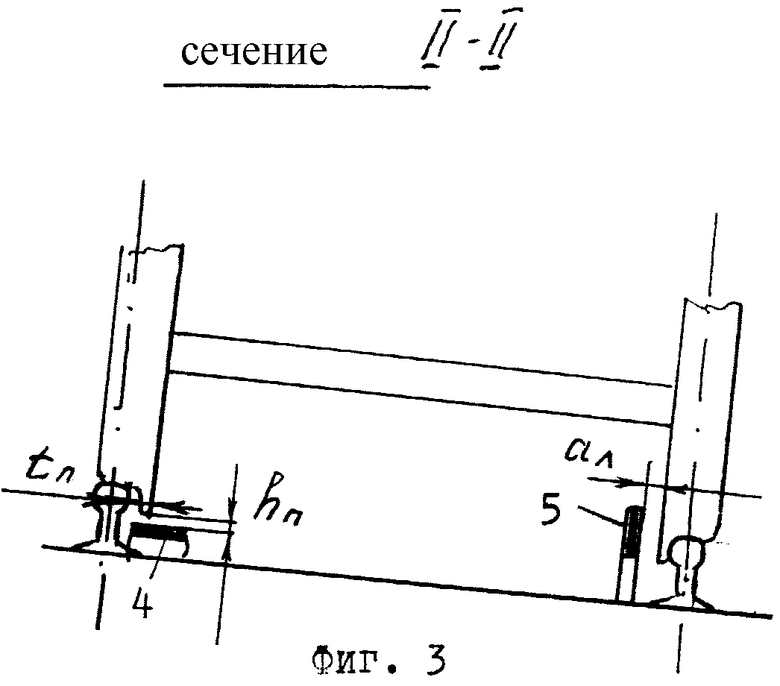
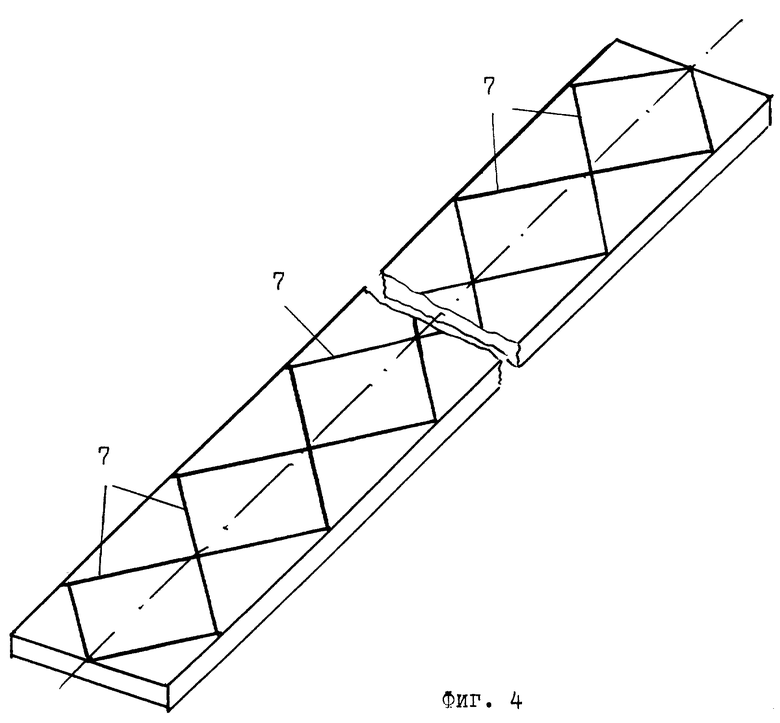
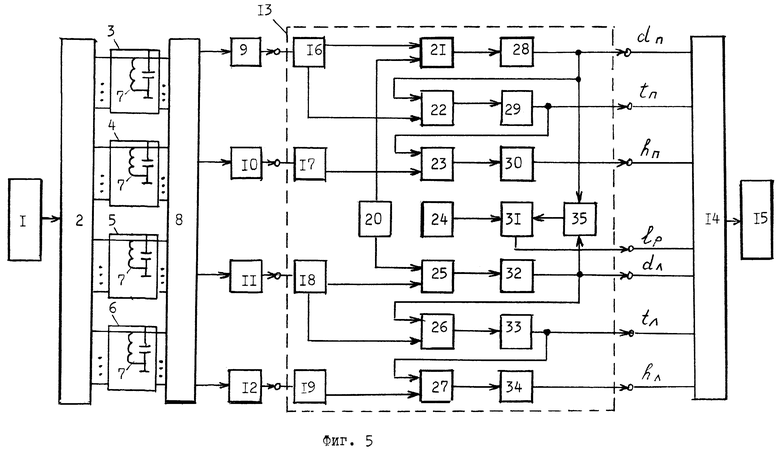
На фиг. 1 показан участок пути в плане и направление движения состава по стрелке; на фиг. 2, 3 - два поперечных сечения участка пути фиг. 1 с максимальными перепадами уровней рельсовых нитей относительно горизонта в одну и другую стороны с колесными парами и с фрагментом размещения датчиков 3, 4, 5, 6 перемещений; на фиг. 4 - конструкция матричного вихретокового датчика перемещений; на фиг. 5 - структурная блок-схема устройства.
Способ состоит в том, что на участке рельсового пути создают как минимум в двух его поперечных сечениях перепады уровней поверхностей катания рельсовых нитей относительно горизонта в одну и другую стороны, соответствующие максимальным предельно-допустимым значениям для прямолинейного участка пути (фиг. 1-3), установленным ГОСТом, жестко закрепляют в этих сечениях с внутренней стороны рельсов колеи матричные вихретоковые датчики 3, 4, 5, 6 перемещений, пропускают по участку сначала подвижное средство на колесных парах с эталонными размерами, измеряют смещение одной колесной пары, поскольку все они идентичны, в осевом направлении одного из поперечных сечений пути и ее ширину между поверхностями скольжения гребней и запоминают эти значения, затем пропускают подвижной состав на колесных парах с рабочими размерами, измеряют смещение каждой колесной пары в осевом направлении каждого из поперечных сечений, смещение колес, находящихся на рельсах верхнего уровня, в радиальном направлении поперечного сечения пути и дополнительно текущую ширину колесной пары между поверхностями скольжения ее гребней, и по полученным результатам измерений смещения колесных пар определяют износ и текущие толщины гребней колесной пары и изгиб ее вала, а по измеренным значениям зазоров между соответствующими датчиками и вершинами гребней колес, находящихся на рельсах верхнего уровня, с учетом найденных текущих величин толщин гребней определяют параметры износа поверхности катания колес, а по времени начала пересечения каждым колесом пары поперечного сечения, в котором датчики установлены одновременно у правого и левого рельсов, определяют перекос оси колесной пары в колее. Расстояние между сечениями максимальных перепадов, в которых установлены датчики, рекомендуется назначать не менее двух, трех длин вагона (50-75 м) во избежание перекосов его рамы на участке.
Перепад уровней поверхностей катания рельсовых нитей в поперечных сечениях I-I и II-II (фиг. 2 и 3) участка пути позволяет принудительно создать движущемуся по участку средству поочередно левый и правый наклон относительно горизонта, вызывающий левое и правое смещение колесной пары до упора гребнем колеса в головку рельса нижнего уровня, тем самым обеспечить контакт поверхности скольжения колеса пары с боковой поверхностью головки рельса нижнего уровня и максимальный зазор между поверхностью скольжения гребня колеса и боковой поверхностью головки рельса верхнего уровня. Поэтому износ гребня определяют на колесе, находящемся на рельсе нижнего уровня, на котором отслеживается с большой точностью рельеф износа гребня, а износ поверхности катания - на колесе, находящемся на рельсе верхнего уровня, на котором легче достигается отстройка от влияния электрофизических свойств материала рельса. Для уменьшения износа головок рельсов и гребней колес от усилия трения при их контакте на участке трущиеся поверхности смазывают.
Смещение колесной пары в поперечном сечении участка пути можно измерять как на колесе, находящемся на рельсе нижнего уровня, так и колесе, находящемся на рельсе верхнего уровня. Последнее предпочтительнее, так как датчик работает на меньшем зазоре до поверхности торца колеса, поэтому его чувствительность выше, чем у датчика, работающего на большом зазоре. Однако для определения перекоса оси колесной пары необходимо и достаточно, чтобы в одном из поперечных сечений датчики были размещены непосредственно у левого и правого рельсов колеи. В нашем случае показан фрагмент размещения датчиков (фиг. 1 - 3) в сечениях I-I и II-II у правого и левого рельсов колеи. Образцовое средство достаточно использовать один раз в год при аттестации участка пути.
Устройство (фиг. 5), реализующее способ, содержит последовательно соединенные высокочастотный генератор 1 и первый коммутатор 2, как минимум 2N матричных вихретоковых датчика перемещений 3, 4, 5, 6 (фиг. 4), где N - число поперечных сечений с максимальными перепадами уровней рельсов, каждый из которых состоит из "n" идентичных катушек 7 индуктивности, второй коммутатор 8, четыре детектора 9, 10, 11, 12, выходы которых подключены к входам блока обработки 13 измерительной информации, блок памяти 14 с таймером и регистратор 15. Выходы первого коммутатора 2 связаны через "n" входов и выходов датчиков 3-6 с входами второго коммутатора 8, четыре выхода которого соединены с входами четырех детекторов 9-12. Количество "n" катушек 7 выбирается в зависимости от длины поверхности контроля, которая равна длине развертки образующей колеса подвижной единицы, динамики процесса контроля и режима контроля (частота тока возбуждения катушек). Если скорость контролируемого подвижного состава превышает 100 км/ч (на практике скорость движения состава на таких участках допускается не более 25 км/ч), то частота коммутации и опроса повышается, а следовательно, повышается и несущая частота возбуждения катушек датчиков, последнее очень выгодно с точки зрения отстройки влияния на датчик электрофизических свойств материала контролируемой поверхности, поэтому размеры катушек 7 уменьшаются, а их количество в датчике возрастает. Практически на длину 3 м (длина образующей поверхности колеса) достаточно назначить "n" = 20 шт. катушек 7 индуктивности и включить каждую из них в автономный колебательный контур для обеспечения высокой их добротности. Катушки 7 размещают в линейку вдоль продольной оси датчика (фиг. 4). Форма катушек 7 может быть разнообразной. Первый коммутатор 2 предназначен для коммутирования "n" катушек датчиков 3-6, не увеличивая мощности генератора 1, и устранения взаимовлияния катушек 7 датчика, а второй коммутатор 8 для сокращения измерительных каналов с "n" до 4-х (фиг. 5).
Блок обработки 13 содержит четыре компенсатора 16, 17, 18, 19, входы которых являются входами блока 13, две схемы 20, 24 опорного напряжения, семь вычитателей 21, 22, 23, 25, 26, 27, 31, шесть усилителей 28, 29, 30, 32, 33, 34 и сумматор 35. Выходы всех шести усилителей 28, 29, 30, 32, 33, 34, а также седьмого вычитателя 31 являются информационными выходами блока 13.
Первые выходы первого и третьего компенсаторов 16, 18 соединены с первыми входами первого и четвертого вычитателей 21, 25, к вторым входам которых подключены первый и второй выходы первой схемы 20 опорного напряжения, а выходы вычитателей 21, 25 связаны с входами первого и четвертого усилителей 28, 32, вторые выходы первого и третьего компенсаторов 16, 18 соединены с первыми входами второго и пятого вычитателей 22, 26, к вторым входам которых подключены выходы первого и четвертого усилителей 28, 32, кроме того, их выходы соединены с первым и вторым входами сумматора 35 соответственно, выходы второго и пятого вычитателей 22, 26 связаны с входами второго и пятого усилителей 23, 33; выходы второго и четвертого компенсаторов 17, 19 соединены с первыми входами третьего и шестого вычитателей 23, 27, к вторым входам которых подключены выходы второго и пятого усилителей 29, 33, выходы третьего и шестого вычитателей 23, 27 связаны с входами третьего и шестого усилителей 30, 34, выход сумматора 35 соединен с первым входом седьмого вычитателя 31, к второму входу которого подключен выход второй схемы 24 опорного напряжения. Выходы блока 13 обработки соединены с входами блока 14 памяти. Фиксированные значения начальных напряжений U0i, соответствующих выходным напряжениям идентичных "n" катушек 7 датчиков 3-6 в отсутствие колесных пар, компенсируются в компенсаторах 16-19. Значения опорных напряжении Uэ в схемах 20, 24 эквивалентны эталонным величинам толщины tэ гребня колеса образцовой пары и длины lэ между поверхностями скольжения гребней этой колесной пары соответственно. Вся измерительная информация хранится в памяти блока 14, а весь процесс контроля геометрических параметров ходовых частей возможно наблюдать на экране регистратора 15.
Техническим результатом изобретения является обеспечение безопасности движения поездов за счет развития высокой технологии диагностики технического состояния ходовых частей подвижного состава на его ходу.
Способ и устройство, его реализующее, работают следующим образом. На эталонном прямолинейном участке пути (фиг. 1) с перепадом уровней поверхностей катания рельсовых нитей (фиг. 2, 3) относительно горизонта попеременно сначала в одну, затем в другую стороны поперечных сечений I-I и II-II пути устанавливают жестко с внутренней стороны рельсов колеи на фиксированном расстоянии от головок рельсов матричные вихретоковые датчики 3-6 перемещений и возбуждают их током высокой частоты генератора 1, в результате чего в зоне действия датчиков возникает электромагнитное поле. При попадании колеса в зону действия электромагнитного поля датчика в электропроводящем материале колеса индицируются вихревые токи, которые наводят вторичное электромагнитное поле, взаимодействующее с первоначальным. Вторичное поле измеряется датчиком и зависит от формы контролируемой поверхности колеса и расстояния до колеса.
По участку сначала пропускают подвижное средство на колесных парах эталонных размеров в направлении, указанном стрелкой на фиг. 1, и измеряют зазор "аэ" между соответствующим датчиком 3 и внутренней торцевой поверхностью правого колеса, находящегося на рельсе нижнего уровня.
Выходной электрический сигнал в виде напряжения Ui на катушках 7 первого датчика 3 изменяется на определенную величину Utэ, соответствующую эталонной толщине tэ гребня образцового колеса, где i = 1, 2 ... n - число катушек 7 датчиков 3-6. Значение Utэ, эквивалентное толщине tэ, запоминают и устанавливают его величину в первой схеме 20 опорного напряжения. С учетом известной длины между колесами эталонной пары и двух толщин tэ гребней колесной пары определяют ее длину lэ между поверхностями скольжения гребней. Значение Ulэ, эквивалентное длине lэ, также запоминают и устанавливают его значение во второй схеме 24 опорного напряжения. При пропускании через диагностический участок пути вагона или состава на колесных парах с рабочими параметрами в том же направлении измеряют зазор "ар" между первым датчиком 3 и внутренней торцевой поверхностью правого колеса, находящегося на рельсе нижнего уровня.
Выходные напряжения Ui1 на катушках 7 первого датчика 3 изменяются на величину Utп, эквивалентную толщине гребня правого рабочего колеса, в отличие от эталонного значения Utэ.
Значение напряжения Ui1 на каждой из катушек 7 первого датчика 3, установленного у рельса нижнего уровня, зависит только от изменения величины зазора "ар" между параллельными поверхностями датчика 3 и торца правого колеса. Так как гребень колеса контактирует с головкой рельса, то изменение зазора "ар" будет эквивалентно изменению износа гребня этого колеса.
Значение толщины tл гребня левого колеса этой пары вычисляется в следующем поперечном сечении II-II, когда колесо будет находиться на рельсе нижнего уровня, т.е. на обратном перепаде уровней рельсовых нитей.
Значение выходного напряжения Ui4 катушек 7 четвертого датчика 6, установленного у рельса верхнего уровня сечения I-I, зависит от толщины tл гребня левого колеса и зазора hл между вершиной гребня этого колеса и датчиком 6, тогда изменение Ui можно представить в виде функции: Ui = f(Utл-Uhл).
Решить это уравнение возможно только тогда, когда контролируемая колесная пара достигнет очередного (второго) поперечного сечения пути II-II, где ее наклон будет обратным, и будут получены результаты измерения левого колеса, оказавшегося на рельсе нижнего уровня. Значение выходного сигнала катушек 7 второго датчика 4, установленного у правого рельса верхнего уровня в сечении II-II, можно представить в виде: Ui = f(Utп-Uhп).
Разные знаки у слагаемых в уравнениях означают, что воздействие слагаемых на Ui разнополярное.
Теперь, когда известны выражения для вычисления значений толщины tл и tп гребней правого и левого колес пары, можно определить зазоры между датчиками и вершинами гребней колес, когда они находятся в верхнем положении.
По значениям зазоров можно определить глубину износа поверхности катания колесных пар, а по продолжительности, измеренной таймером, этого износа и скорости движения вагона судят о длине износа по окружности колеса.
Измеренные значения износов левого и правого колес пары складывают. По полученному текущему значению lp и характеру износа гребней колесной пары судят о возможных изгибах ее вала.
Перекос оси колесной пары в колее оценивают по разности времени начала пересечения колесами пары левого и правого датчиков, размещенных в одном поперечном сечении пути. Результатом измерения перекоса оси является временной сдвиг, зарегистрированный таймером (не показан), моментов достижения нарастающего напряжения каждого из этих датчиков опорного напряжения (не показано), выбранного на линейном участке характеристик обоих датчиков, имеющих одинаковую крутизну. Полученная измерительная информация запоминается в блоке 14 памяти и при необходимости воспроизводится на экране регистратора 15.
Техническим результатом изобретения является повышение безопасности движения поездов за счет расширения объема измерительной информации и ее качества.
Литература
1. SU, авт.св. N 1685774, кл. B 61 K 9/12, 1991.
2. РФ, патент N 2088622, кл. B 61 K 9/12, 1997.
3. РФ, патент N 2088623, кл. B 61 K 9/12, 1997.
Изобретение предназначено для диагностики технического состояния объектов железнодорожного транспорта и может быть использовано для контроля перекоса и изгиба осей колесных пар. На прямолинейном эталонном участке пути создают перепады уровней рельсовых нитей в одну и другую стороны. Износ определяют по изменению сигнала соответствующего матричного вихретокового датчика перемещений. Имеются четыре детектора, блок обработки измерительной информации, блок памяти и регистратор. Датчик перемещений, ориентированный параллельно внутренним торцевым поверхностям колес, расположен у рельса нижнего уровня. Датчик, ориентированный перпендикулярно внутренним торцевым поверхностям колес, расположен у рельсов верхнего уровня ниже гребней колес. Техническим результатом является расширение объема и повышение качества измерений. 2 с. и 1 з.п.ф-лы, 5 ил.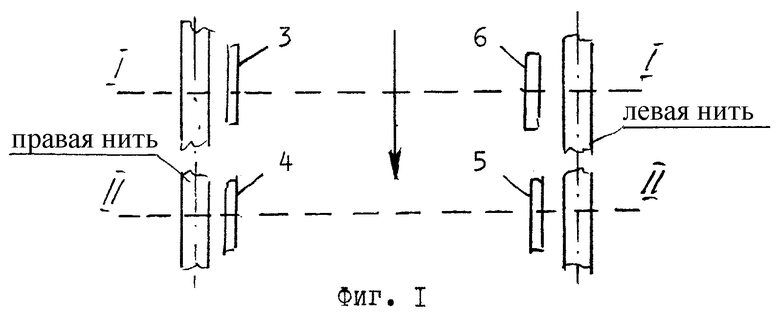
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1996 |
|
RU2085425C1 |
| RU 2066284 С1, 10.09.1996 | |||
| US 4932784 A, 12.06.1990 | |||
| US 5368260 A, 29.11.1994 | |||
| WO 9200214 A2, 09.01.1992 | |||
| DE 3681575 Al, 24.10.1991. | |||
