Изобретение относится к подъемным устройствам, а именно к устройствам для подъема монтажных площадок и платформ, предназначенных для обслуживания контактной сети электрифицированных железных дорог и линий электропередач, расположенных на опорах контактной сети.
Известен механизм подъема того же назначения, установленный на автомотрисе АГВ [1] , выполненный из двух рычагов типа "ножниц", раздвигаемых гидроподъемником.
Такая конструкция механизма подъема ограничивает функциональные возможности рабочей площадки, т.к. при работе на кривых участках пути с превышением одного рельса над другим до 150 мм рабочая площадка, развернутая поперек оси пути, имеет уклон более 10%, что небезопасно для работающих на ней, особенно в зимний период.
Известен механизм подъема параллелограммного типа монтажной площадки автомотрисы АДМ [1].
Конструкция рычагов параллелограммного механизма расположена так, что рабочая площадка может выйти из-под контактного провода, но обладает тем же недостатком, что и механизм АГВ. А на максимальном вылете от оси пути в развернутом положении пол площадки имеет еще больший уклон, так как к уклону от превышения рельса добавляется уклон от естественного прогиба металлоконструкций механизма. Механизм металлоемок.
Наиболее близким аналогом является система стабилизации пола, описанная в DE 2819256A1 08.4.79, недостатком которой является то, что в зависимости от варианта она содержит от 1 до 14 сложных устройств, обеспечивающих стабилизацию горизонтального положения пола, что снижает надежность работы системы и она более сложна в сравнении с предлагаемой.
Техническим результатом, ожидаемым от использования данного изобретения является повышение безопасности работы на площадке, а также уменьшение металлоемкости механизма.
Указанный технический результат достигается тем, что в предлагаемой конструкции несущий элемент выполнен по меньшей мере из одной опоры, которая может быть телескопической. Опора соединена шарнирно последовательно с базовым шасси, между собой, если опор больше одной, и с рабочей площадкой, подъем производится гидроцилиндрами. Площадка удерживается в горизонтальном положении гидроцилиндром стабилизации, соединяющим опору и площадку. Ориентирование площадки в горизонтальном положении осуществляется автоматически с помощью устройства, управляющего работой гидроцилиндра стабилизации и гидроцилиндра подъема опоры.
Изобретение поясняется чертежами.
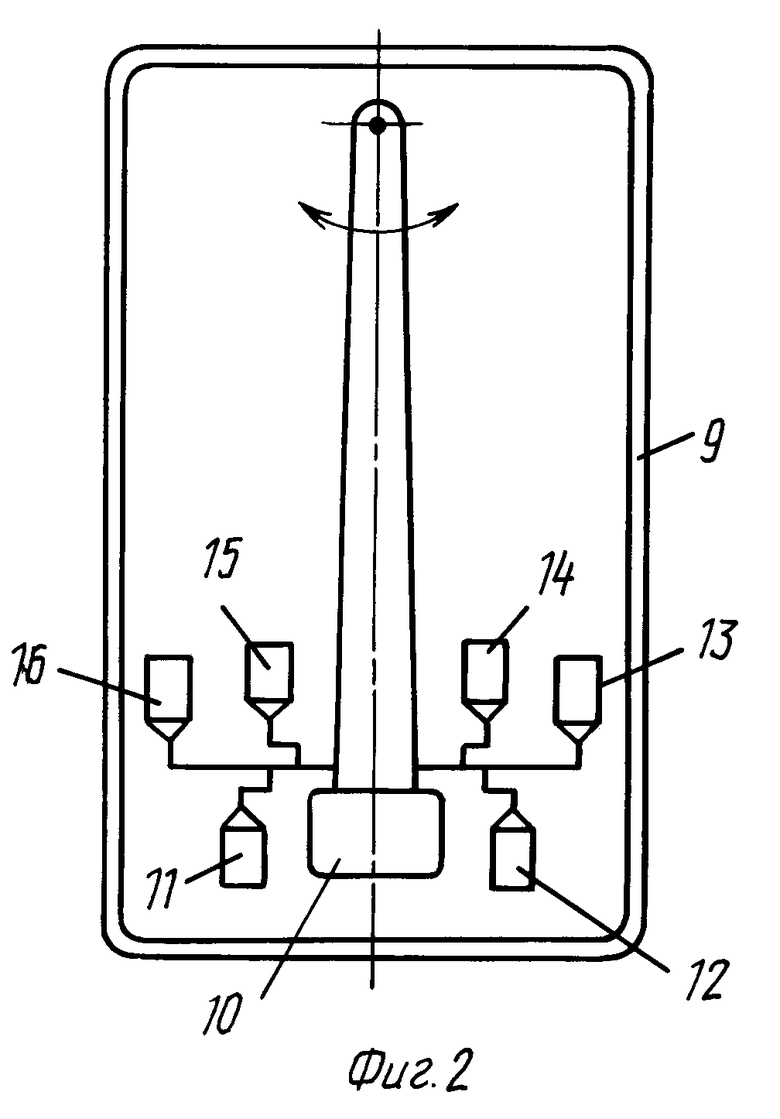
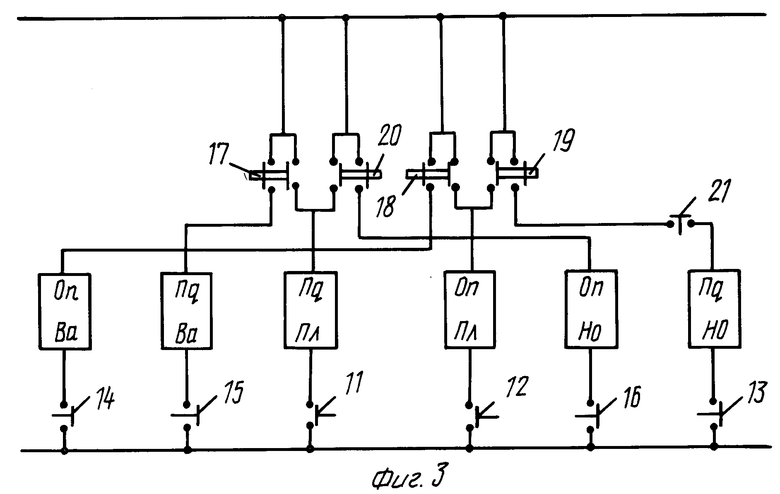
На фиг.1 изображен общий вид механизма подъема площадки, на фиг.2 - механизм управления гидроцилиндрами, на фиг.3 - электросхема управления гидроцилиндрами.
Механизм подъема монтажной площадки установлен на базовом шасси 1 и состоит из двух опор - нижней 2 и верхней 3. Опоры 2 и 3 соединены шарнирно последовательно с базовым шасси, между собой и с рабочей площадкой 4. Для подъема и опускания нижней опоры установлен гидроцилиндр 5 и верхней опоры - гидроцилиндр 6.
Для удержания рабочей площадки в горизонтальном положении установлен гидроцилиндр стабилизации 7, соединяющий верхнюю опору 3 с рабочей площадкой 4. Управление работой гидроцилиндра стабилизации осуществляется автоматически при помощи механизма управления гидроцилиндрами 8, расположенного на рабочей площадке.
Механизм управления гидроцилиндрами состоит из корпуса 9, в котором расположен отвес 10, воздействующий на выключатели 11 и 12 управления гидроцилиндром стабилизации и 13, 14, 15 и 16 управления гидроцилиндрами опор. Управление подъемом и опуском площадки осуществляется с пульта управления, на котором расположены кнопки 17, 18, 19, 20 и выключатель 21. Отвес 10 взаимодействует с выключателями 11, 12, 13, 14, 15 и 16 пластинами 22.
Механизм подъема монтажной площадки работает следующим образом.
Вначале площадка поднимается верхней опорой 3. При нажатии кнопки 17 на подъем верхней опоры одновременно с гидроцилиндром 6 опоры включается и гидроцилиндр стабилизации 7 площадки. В случае перекоса площадки в результате разницы усилий и сопротивлений гидроцилиндров 6 и 7 происходит отклонение отвеса 10 в ту или иную сторону. При этом он своими пластинками 22 включает или выключает цепи управления гидроцилиндра 6 через выключатель 15, а гидроцилиндра 7 через выключатель 11, что обеспечивает подъем площадки практически в горизонтальном положении.
Опуск опоры верхней происходит аналогично: при нажатии на кнопку 18 включаются одновременно гидроцилиндры 6 и 7 и при отклонении площадки и отвеса в ту или иную сторону размыкаются концевые выключатели 12 и 14.
Подъем нижней опоры происходит при нажатии на кнопку 19. Включается гидроцилиндр 5 на подъем, а 7 на опуск (при этом схема срабатывает только тогда, когда поднята площадка и разблокирован выключатель 21). Стабилизация осуществляется так же, как и при подъеме верхней опоры, через выключатели 12 и 13, которыми управляет отвес 10, включая и выключая их при нарушении горизонтального положения площадки.
Опуск нижней опоры происходит при нажатии на кнопку 21. При этом гидроцилиндр 5 работает на опуск, а гидроцилиндр 7 - на подъем. Контролируется работа гидроцилиндров выключателями 11 и 16 и отвесом 10.
ИСТОЧНИКИ ИНФОРМАЦИИ:
1. А. В. Фрайфельд, Н.А.Бондарев, А.С.Марков. "Устройство, сооружения и эксплуатация контактной сети и воздушных линий", М., "Транспорт", 1987 , с. 158-161.
2. Описание к патенту DE 2819256A1 08.4.79.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОДЪЕМА МОНТАЖНОЙ ПЛОЩАДКИ ПУТЕВОЙ МАШИНЫ | 2002 |
|
RU2227118C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ И РЕМОНТА КОНТАКТНОЙ СЕТИ | 1997 |
|
RU2114048C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ РАБОЧЕЙ СКОРОСТИ ПУТЕВОЙ МАШИНЫ | 1997 |
|
RU2128122C1 |
| СПОСОБ РАЗРЯДКИ ТЕМПЕРАТУРНЫХ НАПРЯЖЕНИЙ В РЕЛЬСОВОЙ ПЛЕТИ БЕССТЫКОВОГО ПУТИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2135669C1 |
| МОНТАЖНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ КОНТАКТНОЙ СЕТИ | 1995 |
|
RU2091293C1 |
| ПУТЕВАЯ МАШИНА | 1996 |
|
RU2108934C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
| АГРЕГАТ РЕМОНТНО-БУРОВОЙ АР32/40 | 2007 |
|
RU2380512C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ГОРНОГО КОМБАЙНА | 2008 |
|
RU2375570C1 |
Изобретение относится к устройствам, предназначенным для подъема монтажных площадок и платформ при обслуживании контактной сети железных дорог и линий электропередач, размещенных на опорах контактной сети. Механизм подъема оборудован системой стабилизации, удерживающей рабочую площадку в горизонтальном положении с помощью гидроцилиндра стабилизации, который управляется через систему выключателей. Механизм управления гидроцилиндрами подъема и стабилизации содержит по крайней мере четыре конечных выключателя, взаимодействующих с отвесом посредством имеющихся у него пластинок. Изобретение позволяет повысить безопасность работы механизма и снизить его металлоемкость. 3 ил.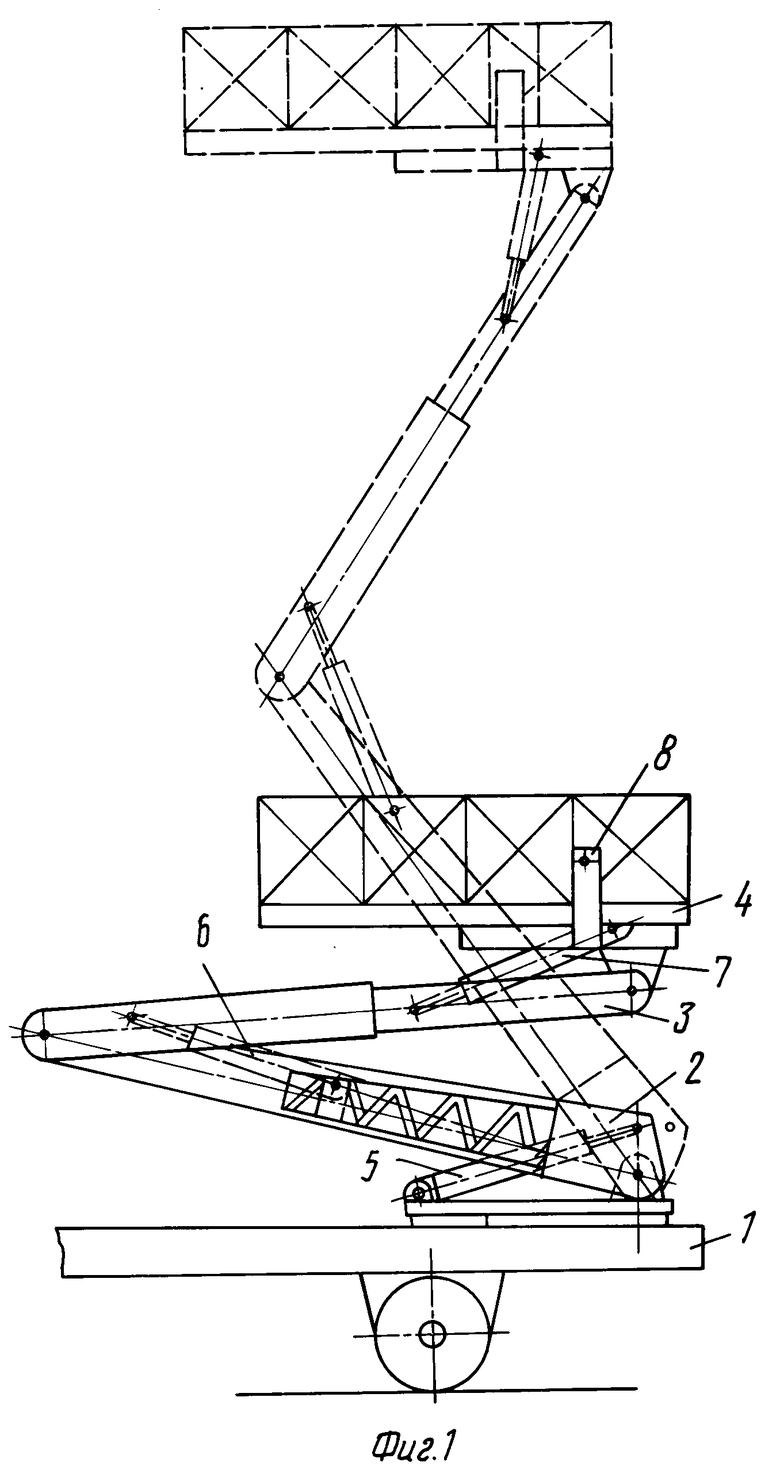
Механизм подъема монтажной площадки путевой машины, содержащей по меньшей мере одну опору, соединенную шарнирно с базовым шасси и монтажной площадкой, по меньшей мере один гидроцилиндр подъема и систему стабилизации горизонтального положения монтажной площадки, которой оборудована последняя, включающую в себя гидроцилиндр стабилизации, отвес и механизм управления гидроцилиндрами подъема и стабилизации, отличающийся тем, что упомянутый механизм управления содержит по крайней мере четыре конечных выключателя, взаимодействующих с упомянутым отвесом посредством имеющихся у него пластинок и включенных в цепь управления упомянутыми гидроцилиндрами подъема и стабилизации.
| УСТРОЙСТВО ДЛЯ ЖАРКИ | 2021 |
|
RU2819256C1 |
| Передвижной гидравлический подъемник | 1980 |
|
SU998321A1 |
| Подъемное устройство | 1986 |
|
SU1331824A1 |
| US 3526295 A, 01.09.70. | |||
