Изобретение относится к гидравлическим подъемникам и может быть использовано при выполнении монтажных работ в строительстве, а также при возведении воздушных линий электропередачи.
Целью изобретения является повышение безопасности работы путем исключения перегрузки площадки при повышении на ней грузового момента и е опрокидывания при отсутствии рабочего давления в системе слежения.
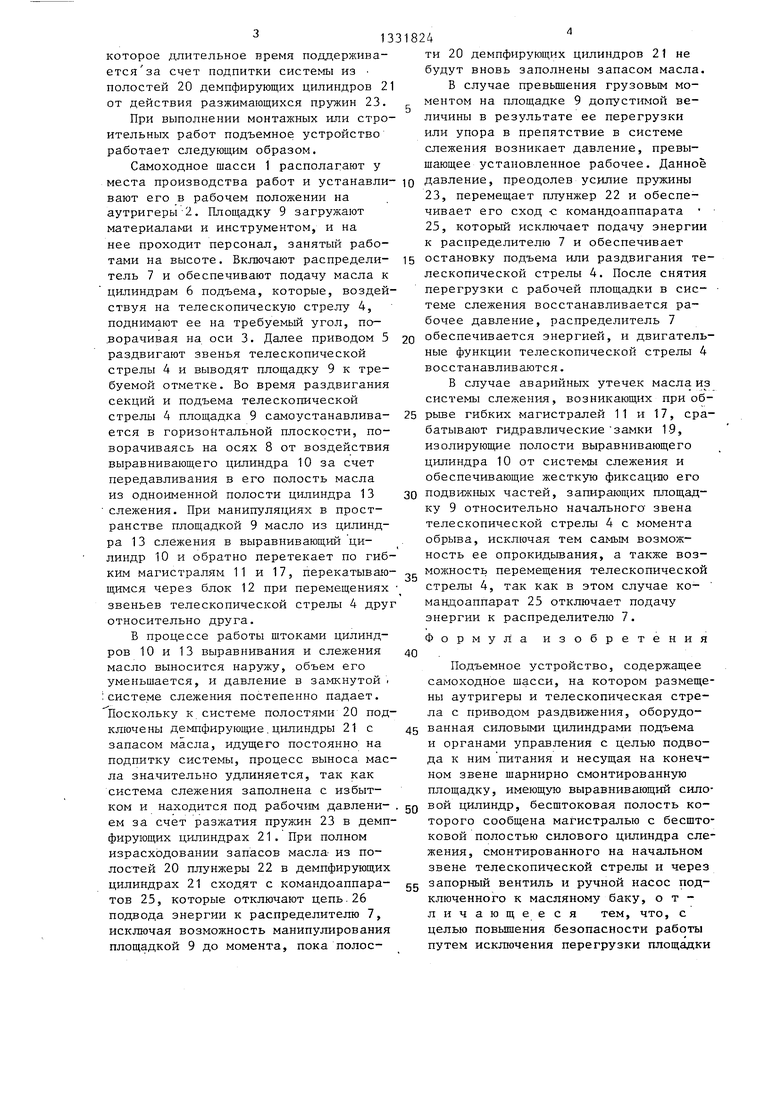
На фиг. 1 показано подъемное устройство в рабочем положении; на фиг. 2 - узел I на фиг. 1; на фиг.3- гидропривод подъемного устройства.
Подъемное устройство содержит самоходное шасси 1, на котором установлены аутригеры 2 и шарнирно на оси 3 размещена телескопическая стрела 4 с приводом 5 раздвигания. Телескопическая стрела 4 оборудована парой си.по- вых дилиндров 6 подъема, которые с приводом 5 раздвигания срабатывают при подаче команд через распределитель 7. Последний может иметь механическое или электрическое управление. На конечном звене телескопической стрелы 4 посредством осей 8 шарнирно смонтирована площадка 9 с выравнивающим цилиндром 10, который .одним кондом опирается на конечное звено телескопической стрелы 4, а другим - на площадку 9. Бесштоковая полость выравнивающего цилиндра 10 связана через гибкую магистраль 11 , перекатьшающуюся через блок 12 при перемещениях звеньев телескопической стрелы 4, с бесштоковой полостью цилиндра 13 слежения, смонтированного на начальной секции телескопической стрелы 4 и опирающегося на самоходное шасси 1. Бесштоковая полость цилиндра 13 слежения через запорный: вентиль 14 и ручной насос 15 подключена .к масляному баку 16.
Штоковые полости цилиндров выравнивания 10 и слежения 13 связаны между собой дополнительной гибкой магистралью 17, которая, как и гибкая магистраль 11, огибает блок 12 и через дополнительный запорный вентиль 18 подключена к ручному насосу 15. Гибкие магистрали 11 и 17 присоединены к штоковой и бесштоковой полостям цилиндра 10 выравнивания через гидрЕшлические замки 19, при ,этом к каясдой гибкой магистрали 11 и 17
0
5
0
0
полостью 20 подключен демпфирующий цилиндр 21, плунжер 22 которого нагружен пружиной 23 с регулируемым усилием посредством гайки 24 и взаимодействует с командоаппаратом 25, включенным последовательно в цепь 26 подвода энергии к распределителю 7, подающему команды, на срабатывание силовых цилиндров 6 подъема и привода 5 раздвигания телескопической стрелы 4.
При механическом управлении распределителем 7 в качестве командо- аппарата 25 используется гидравлический двухходовый распределитель с кулачковым управлением, открывающий или закрывающий поток рабочей жидкости под давлением к распределителю 7, если распределитель 7 имеет электрическое управление, то в качестве ко- мандоаппарата 25 используется конеч- . ный выключатель, обеспечивающий подачу или отключение электроэнергии к
5 органам его управления.
Устройство работает следующим образом.
Перед приведением подъемного устройства в рабочее состояние площадке 9 задают горизонтальное положение в пространстве. Для этого гайками 24 предварительно устанавливают определенное усилие пружины 23 в демпфирующих цилиндрах 21. Открьшают запорные вентили 14 и 18 и ручным насосом 15 из масляного бака 16 нагнетают под давлением масло в полости цилиндров 10 и 15 выравнивания и слежения, гибкие магистрали 11 и 17 и полости 20
0 демпфирующих цилиндров 21. Возникающее пр)и этом рабочее избыточное давление действует на плунжеры 22 и отводит их в исходное положение, сжимая пружины 23 и воздействуя на командо- аппараты 25, которые обеспечивают в таком состоянии подачу энергии к распределителю 7. После создания необходимого рабочего давления в системе слежения покачиванием в вертикальной плоскости площадки 9 обеспечивают исходное горизонтальное положение в пространстве за счет выравнивания объемов масла, находящегося в одноименных полостях гщлиндров выравнивания 10 и слежения 13. После этого запорные вентили 14 и 18 закрьшают. Система ориентации площадки 9 в гори- зонтальной плоскости готова к работе и находится под избыточным давлением.
5
5
0
5
которое длительное время поддерживается за счет подпитки системы из полостей 20 демпфирующих цилиндров 21 от действия разжимающихся пружин 23.
При выполнении монтажных или строительных работ подъемное устройство работает следующим образом.
Самоходное шасси 1 располагают у
места производства работ и устанавли- ю давление, преодолев усилие пружины
вают его в рабочем положении на аутригеры 2. Площадку 9 загружают материалами и инструментом, и на нее проходит персонал, занятый работами на высоте. Включают распределитель 7 и обеспечивают подачу масла к цилиндрам 6 подъема, которые, воздействуя на телескопическую стрелу 4, поднимают ее на требуемый угол, по- .ворачивая на оси 3. Далее приводом 5 раздвигают звенья телескопической стрелы 4 и выводят площадку 9 к требуемой отметке. Во время раздвигания секций и подъема телескопической стрелы 4 площадка 9 самоустанавливается в горизонтальной плоскости, поворачиваясь на осях 8 от воздействия выравнивающего цилиндра 10 за счет передавливания в его полость масла из одноименной полости цилиндра 13
слежения. При манипуляциях в пространстве площадкой 9 масло из цилиндра 13 слежения в выравнивающий цилиндр 10 и обратно перетекает по гибким магистралям 11 и 17, перекатывающимся через блок 12 при перемещениях звеньев телескопической стрелы 4 друг относительно друга.
В процессе работы штоками цилиндров 10 и 13 выравнивания и слежения масло выносится наружу, объем его уменьшается, и давление в замкнутой
;системе слежения постепенно падает.
Поскольку к системе полостями 20 подключены демпфирующие,цилиндры 21 с запасом масла, идущего постоянно на подпитку системы, процесс выноса масла значительно удлиняется, так как система слежения заполнена с избытком и находится под рабочим давлени- ем за счет разжатия пружин 23 в демпфирующих цилиндрах 21. При полном израсходовании запасов масла- из полостей 20 плунжеры 22 в демпфирующих цилиндрах 21 сходят с командоаппара- тов 25, которые отключают цепь.26 подвода энергии к распределителю 7, исключая возможность манипулирования площадкой 9 до момента, пока полости 20 демпфирующих цилиндров 21 не будут вновь заполнены запасом масла. В случае превьшения грузовым моментом на площадке 9 допуст1тмой величины в результате ее перегрузки или упора в препятствие в системе слежения возникает давление, превышающее установленное рабочее. Данное
5
0
5
23, перемещает плунжер 22 и обеспечивает его сход -с командоаппарата 25, который исключает подачу энергии к распределителю 7 и обеспечивает остановку подъема или раздвигания телескопической стрелы 4. После снятия перегрузки с рабочей площадки в сие- теме слежения восстанавливается рабочее давление, распределитель 7 обеспечивается энергией, и двигательные функции телескопической стрелы 4 восстанавливаются.
В случае аварийных утечек масла из системы слежения, возникающих при об- рьше гибких магистралей 11 и 17, срабатывают гидравлические замки 19, изолируюш хе полости выравнивающего цилиндра 10 от системы слежения и обеспечивающие жесткую фиксащпо его 0 подвижных частей, запирающих площадку 9 относительно начального звена телескопической стрелы 4 с момента обрыва, исключая тем самым возможность ее опрокидьшания, а также возможность перемещения телескопической стрелы 4, так как в этом случае ко- ман,цоаппарат 25 отключает подачу энергии к распределителю 7.
Формула изобретения
0
Подъемное устройство, содержащее самоходное шасси, на котором размещены аутригеры и телескопическая стрела с приводом раздвижения, оборудованная силовыми цилиндрами подъема и органами управления с целью подвода к ним питания и несущая на конечном звене шарнирно смонтированную площадку, имеющую выравнивающий силовой цилиндр, бесштоковая полость которого сообщена магистралью с бесшто- ковой полостью силового щшиндра слежения, смонтированного на начальном звене телескопической стрелы и через
g запорный вентиль и ручной насос подключенного к масляному баку, отличающееся тем, что, с целью повышения безопасности работы путем исключения перегрузки площадки
5
5
0
133
при повышении на ней грузового момента и ее опрокидывания при отсутствии рабочего давления в системе слежения, штоковые полости силовых цилиндров выравнивания и слежения сообщены между собой дополнительной магистралью и через дополнительный вентиль подключены к ручному насосу, при этом основная и дополнительная магистрали присоединены к цилиндру выравнивания через гидравлические замки, а к каждой
1824б
из них полостью подключен демпфирующий цилиндр, которым снабжено устройство и который выполнен с плунже- ром, нагруженш 1м пружиной с регулируемым усилием и взаимодействзтощим с командоаппаратом, которым снабжено устройство и который включен последовательно в цепь привода питания к органам управления силовыми цилиндрами подъема и подвода раздвижения телескопической стрелы.
10
22
I I I
2В
Фиг.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
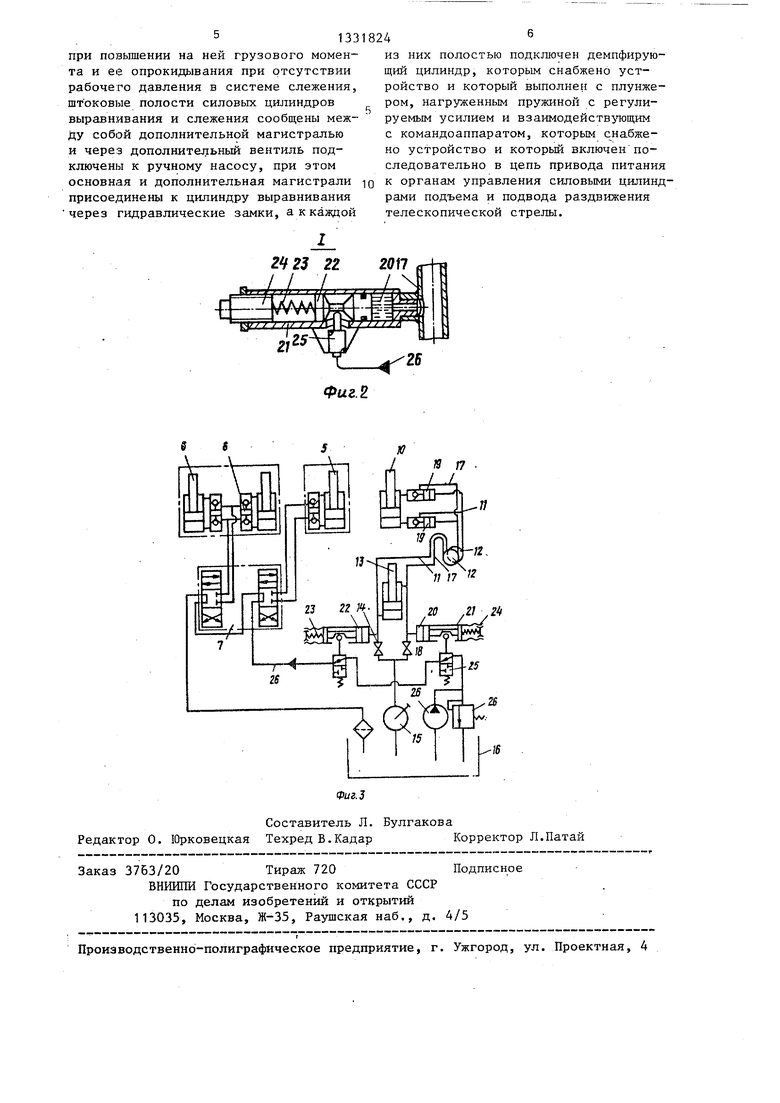
Изобретение относится к гидравлическим подъемникам, которые могут быть использованы при строительстве воздушных линий электропередач или при выполнении монтажных и специальных работ в строительстве. Изобретение позволяет повысить безопасность работ путем исключения перегрузки площадки при повышении на ней грузового момента и ее опрокидывания при ; отсутствии рабочего давления в системе слежения. Для этого подъемное устройство содержит самоходное шасси 1, на котором размещены аутригеры 2 и на осях 3 телескопическая стрела 4 с приводом раздвигания 5. Телескопическая стрела 4 оборудована силовыми цилиндрами подъема 6, которые с приводом раздвигания 5 имеют орган управления, представляющий собой распределитель 7. На конечном звене стрелы 4 с помощью осей 8 шар- нирно смонтирована площадка 9, имеющая выравнивающий цилиндр 10, бесшто- ковая полость которого связана гибкой магистралью 11, перекатывающейся через блок 12, с бесштоковой полостью цилиндра слежения 13, смонтированного на начальном звене телескопической стрелы 4. Бесштоковая полость цилиндра слежения 13 через запорный вентиль 14 и ручной насос 15 подключена к масляному баку 16. 3 ил. с О) со со 00 to 4i
ю
1 п
П .Фиг.З
Составитель Л. Булгакова Редактор О. Юрковецкая Техред В.Кадар Корректор Л.Патай
Заказ 3763/20 Тираж 720Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Оборудование и приспособление для монтажа строительных конструкций | |||
| Отраслевой каталог, ч | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М., ЦБНТИ, 1985, с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
