Изобретение относится к весоизмерительной технике, а конкретнее, а способам определения веса вагонов в процессе движения состава.
В настоящее время для определения веса вагонов в процессе движения состава используют платформенные весы, в которых весоприемным устройством является платформа, на которую наезжает испытываемый вагон. Сложность и высокая стоимость сооружения на железнодорожном пути катлована с платформой вынуждает искать способы, когда веса вагонов определяются по воздействию на рельсовый путь. Однако при этом возникает принципиальная трудность идентификации воздействия колес оси тележки вагона, поскольку на путь одновременно воздействуют все колеса вагонов.
Техническим результатом предлагаемого способа является выделение (идентификация) силы, воздействующей на путь только от измеряемой колесной пары тележки, путем компенсации воздействий всех других колесных пар состава.
Известны потележечные способы, реализуемые в электронно-тензометрических весах для взвешивания железнодорожных вагонов на ходу типа 100 х 2 ТВД 5, 1826 ВЧС-200 B, 1723 ВЧС-200 B и др. (смотрите, например, Весы и дозаторы весовые: Справочник. С.П.Маликов и др. - М.: Машиностроение, 1981, с. 34-35).
Недостатком этих способов и весов является необходимость строительства на железнодорожном пути сложной и дорогостоящей платформы.
Известен способ поосного взвешивания железнодорожных вагонов в движении по авторскому свидетельству СССР N 1749716, включающий определение осевых коэффициентов контрольных вагонов известного веса при прямом и обратном ходе, измерение осевых усилий от вагонов, вес которых измеряется, и вычисление их массы: суммированием произведений осевых усилий на осевые коэффициенты контрольных вагонов при прямом и обратном ходе состава.
Недостатком этого способа-аналога и реализующего его устройства является необходимость наличия в составе контрольных вагонов и сложность операций с составом из-за необходимости прямого и обратного его хода.
В качестве способа-прототипа выбран, способ, использованный в динамических весах для транспортных средств по патенту США N 4793429. Этот способ содержит прием сигнала от датчика, пропорциональный воздействующей силе от колесной пары, преобразование значения заряда, образовавшегося в датчике при взвешивании, в напряжение, определение пикового значения напряжения и преобразование этого пикового значения напряжения в массу взвешиваемого объекта с учетом чувствительности датчика.
Недостатком способа-прототипа является наличие погрешности измерения из-за невозможности выделить при взвешивании только силу от колесной пары из-за одновременного воздействия на путь всех колесных пар.
Устройство-прототип по патенту США N 4793429 на динамические весы для транспортных средств содержит последовательно соединенные датчик силы от воздействия колесной пары, усилитель, пиковый детектор и вычислитель массы в виде делителя и индикатор, также содержит блоки памяти ускорения силы тяжести и чувствительности датчика.
Недостатком устройства-прототипа также как способа-прототипа является наличие погрешности измерения из-за невозможности выделить при взвешивании только силу от колесной пары из-за одновременного воздействия на путь всех колесных пар состава.
Задачей изобретения является идентификация измеряемой силы от воздействия колесной пары, находящейся в момент измерения над датчиком, путем компенсации сил от других колесных пар, воздействующих на железнодорожный путь.
Предлагаемый способ, также как и способ-прототип заключается в преобразовании сигнала датчика, пропорционального воздействию на рельс от колесной пары, в напряжение и определение массы взвешиваемого вагона.
В предлагаемом способе дополнительного устанавливаются вспомогательные датчики в сечениях рельсового пути, в которых изгибающий момент и прогиб от воздействия колесной пары, находящейся над основным датчиком, равны нулю, измеряют вспомогательными датчиками сигналы от мешающих изгибающих моментов всех колесных пар, не находящихся над основным датчиком, преобразуют сигналы от основного и вспомогательных датчиков в среднеквадратические напряжения, осуществляют приведение мешающих изгибающих моментов к координате расположения колесной пары над основным датчиком и производят усреднение приведенных изгибающих моментов, осуществляют компенсацию мешающих воздействия от колесных пар, не находящихся над основным датчиком с использованием среднеквадратических напряжений от основного и вспомогательных датчиков, а массу взвешиваемого вагона определяют с учетом электромеханических чувствительностей основного вспомогательных датчиков.
Вновь введенные существенные признаки обеспечивают компенсацию мешающего воздействия и повышение за счет этого точности определения веса вагонов.
Компенсационное устройство для определения веса вагона, как и устройство-прототип, содержащее основной датчик, соединенный с усилителем, вычислитель, соединенный с индикатором, также блок памяти электромеханической чувствительности, связанный с блоком памяти ускорения силы тяжести в координате расположения основного датчика, выходы которых соединены соответственно со вторым и третьим входами вычислителя.
В устройство введены последовательно-соединенные первый полосовой фильтр, вход которого соединен с выходом усилителя основного датчика, определитель момента максимального воздействия колесной пары на основной датчик, первый измеритель среднеквадратичного напряжения и вычитатель, выход которого соединен со входом вычислителя, также введены последовательно соединенные вспомогательные датчики, вторые усилители, вторые полосовые фильтры, вторые измерители среднеквадратичного напряжения, второй вход которых соединен со вторым входом определителя момента максимального воздействия колесной пары на основной датчик, блок пересчета, выход которого соединен со вторым входом вычитателя, а также блок памяти коэффициента относительной жесткости основания пути и рельса, выход которого соединен с четвертым входом вычислителя, блок управления, первый, второй, третий, четвертый и пятый синхровыходы которого соединены соответственно с блоком пересчета, вычитателем, блоками памяти, вычислителем и индикатором.
Вновь введенные блоки обеспечивают требуемый технический результат, а именно, компенсацию мешающих воздействий на путь колесных пар, в настоящий момент не находящихся над основным датчиком.
Полученный результат нельзя было заранее предсказать из известного уровня техники поосного взвешивания железнодорожных вагонов.
На фиг.1 приведено пояснение к предлагаемому способу и показано расположение оси координат.
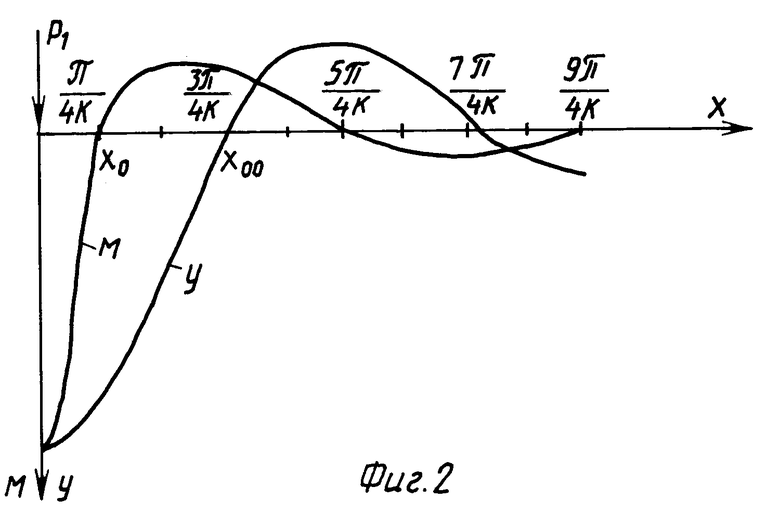
На фиг.2 приведен характер изгибающего момента в функции координаты.
На фиг.3 приведена блок-схема предлагаемого устройства.
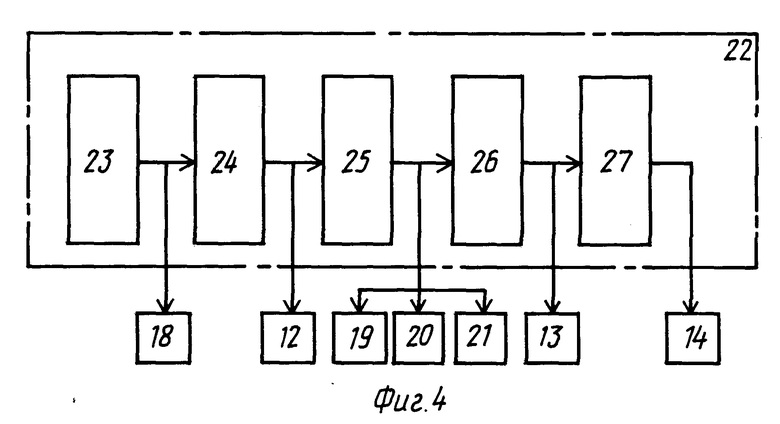
На фиг.4 приведена блок-схема устройства управления.
Для подтверждения осуществимости способа приведем его расчетное обоснование.
Пусть по железнодорожному пути (фиг.1), содержащему балласт 1, шпалы 2 и рельс 3 движется товарный состав. Пусть требуется определить силу P1, передаваемую пути колесной пары 4, на которую воздействует через тележку кузов вагона 5.
Пусть на пути установлен основной датчик 6 изгибающего Mо момента в сечении пути под колесной парой 4, силу воздействия которой необходимо определить. Кроме того, установлены вспомогательные датчики 7, на расстояниях xо и xоо от основного.
Как известно из теории пути (смотрите, например, М.А.Чернышев. Практические методы расчета пути. -М.: Транспорт, 1967; М.Ф.Вериго. Динамика вагонов. -М.: ВЗИИЖТ, 1971, -с. 148) силы, передаваемые колесными парами P1,P2.. ., Pn, создают в сечении под колесной парой 4 (фиг.1) изгибающий момент, равный сумме моментов от каждой из этих сил, т.е.

где
k- коэффициент относительной жесткости пути и рельса;
μ(k,x) = e-kx(coskx-sinkx); (2)
x1, x2, ..., xn - координаты воздействия сил от колесных пар.
Изгибающий момент от воздействия на путь колесной пары 4(фиг.1) приведен на фиг.2:
Видно, что этот изгибающий момент имеет осциллирующий характер и при координате x0 равен нулю  m = 0, 1, 2, ...).
m = 0, 1, 2, ...).
При x = 0 наблюдается максимум изгибающей силы
Определим изгибающий момент в точке x0 расположения вспомогательного датчика 7 (фиг.1, 2), который имеет вид
В момент, когда колесная пара 4 (фиг.1) находится над основным датчиком 6, координата x1 = 0 и
Выберем х0 таким образом, чтобы воздействие от колесной пары 4, находящейся в точке x = 0, равнялось нулю. Для этого необходимо
Из выражения (7) вытекает, что
т. е. воздействие от колесной пары, находящейся при x = 0, в сечении x0 будет равно нулю при
tg kx0=1 (9)
или, что то же самое,
где m = 0, 1, 2, 3, ... - точки нулевого значения изгибающего момента от воздействия на путь колесной пары, находящейся при x = 0/
Таким образом, при х0 и m = 0, определяемой по формуле (10) изгибающий момент, определяемый вспомогательным датчиком будет иметь вид
Подставляя значение x0, окончательно найдем
Теперь рассмотрим сечение пути  при m = 1, в котором
при m = 1, в котором
coskxoo + sinkxoo = 0. (13)
В точке xoo = 3π/4k изгибающий момент M(x00) от воздействия колесной пары 4 и воздействия остальных колесных пар равен
Теперь мешающее воздействие колесных пар i = 2, 3,... n можно представить в виде
Подставляя в формулу (I) окончательно найдем
Если электромеханические чувствительности основного и вспомогательных датчиков соответственно  , то возникающие на них напряжения
, то возникающие на них напряжения  связаны с изгибающими моментами соотношениями
связаны с изгибающими моментами соотношениями
Если дополнительно использовать дополнительные датчики в сечениях  то после усреднения, окончательно можно записать для силы воздействия на рельс первой колесной пары
то после усреднения, окончательно можно записать для силы воздействия на рельс первой колесной пары
И, окончательно, для массы вагона, приходящейся на первую колесную пару можно записать
где q - ускорение силы тяжести в месте установки датчиков.
Формулы (18) и (19) представляют собой основной алгоритм предложенного способа. В них k и q - известные для данного пути постоянные величины, чувствительности γo и γBD основного и вспомогательного датчиков определяются заранее. Среднеквадратические напряжения  определяются в процессе измерений веса вагонов.
определяются в процессе измерений веса вагонов.
Далее, как и в способе-прототипе суммированием по осям, например, для четырехосного вагона находят его вес:
m = m15 + m2 + m3 + m4.
Таким образом, предлагаемый способ может быть практически осуществлен.
Пример. Определение веса вагонов осуществлялось при движении состава по железнодорожному пути, имеющему щебеночный балласт 1 (фиг.1), шпалы 2 (типа ПБ) числом 1440 на 1 км пути и рельсы 3 типа P50. Для такого пути согласно таблиц книги М.А.Чернышев. Практические методы расчета пути. -М.: Транспорт, 1967, при износе рельс в 3 мм коэффициент относительной жесткости основания пути и рельса составляет:
k = 0,0107 см-1.
Вспомогательные датчики были установлены на расстояниях
Сигналы от обоих датчиков преобразовывались в среднеквадратические напряжения. Масса воздействия вагона на колесную пару, определенная по компенсационному алгоритму оказалась равной m1 = 14,2. Вес вагона оказался равным m = 54 тонны.
Оценка погрешности показала, что без реализации операций способа погрешность составит 6,4%, а при реализации способа примерно 0,82%.
Компенсационное устройство определения веса вагонов содержит последовательно соединенные основной датчик 6, первый усилитель 8, первый полосовой фильтр 9, определитель момента максимального воздействия колесной пары 4 на основной датчик 10, первый измеритель среднеквадратического напряжения 11, вычитатель 12, вычислитель 13 и индикатор 14, также содержит последовательно соединенные вспомогательные датчики 7, вторые усилители 15, вторые полосовые фильтры 16, вторые измерители среднеквадратического напряжения 17, второй вход которых соединен со вторым выходом определителя момента максимального воздействия 10, блок пересчета 18, выход второго соединен со вторым входом вычитателя 12, также содержит блок памяти ускорения силы тяжести 19, выход которого соединен со вторым входом вычислителя 13, блок памяти чувствительностей основного вспомогательного датчиков 20, выход которого соединен с третьим выходом вычислителя 13, блок памяти коэффициента относительной жесткости пути и рельса 21, выход которого соединен с четвертым входом вычислителя 13, также содержит устройство управления 22, синхровыходы которого соединены соответственно с синхровходами блоков пересчета 18, вычитателя 12, блоков памяти 19, 20, 21, вычислителя 13, индикатора 14.
Реализацию операций способа осуществляют вновь введенные последовательно соединенные блоки 9, 10, 11, 12, также вновь введенные блоки 7, 15, 16, 17, 18, 21, 22.
Работа устройства осуществляется следующим образом. Основной датчик 6 и вспомогательные датчики 7 вырабатывают электрические заряды, которые усиливаются в первом 8 и вторых 15 усилителях, фильтруются в первом 9 и вторых 16 фильтрах.
Эти заряды преобразуются в среднеквадратические напряжения в блоках 11 и 17, которые отсчитываются в момент максимального воздействия колесной пары 4 на основной датчик 6, определяемый блоком 10, который также осуществляет транзит заряда в блок 11. В блоке 18 осуществляется пересчет к координате x = 0 по алгоритму формулы (19). В вычитателе 12 происходит компенсация мешающих воздействий и в блоке 13 ведется пересчет по алгоритмам 20, 21, 23.
В блоке 10 определяется момент максимального воздействия колесной пары 4 на датчике 6 путем вычисления производной к функции изгибающего момента 14 во времени, поскольку x = vt где v - постоянная скорость движения состава, t - время, и определения момента времени, когда производная равна нулю.
Блок-схема устройства управления 22 приведена на фиг.4. это устройство 22 содержит последовательно соединенные тактовый генератор 23, первую 24, вторую 25, третью 26, четвертую 27 линии задержек, синхровыходы которых соединены соответственно с синхровходами блоков 18, 12, 19+20+21, 13 и 14.
построение других блоков устройства известно из техники и их построение не требует изобретательного творчества.

Изобретение предназначены для определения веса вагона в процессе движения состава. Техническим результатом является идентификация измеряемой силы от воздействия колесной пары, находящейся в момент измерения над датчиком, путем компенсации сил от других колесных пар, воздействующих на железнодорожный путь. Способ заключается в преобразовании сигнала датчика, пропорционального воздействия на рельс силы от колесной пары, в напряжение и определении массы взвешиваемого вагона. В сечениях рельсового пути, в которых изгибающий момент и прогиб от воздействия колесной пары, находящейся над основным датчиком, равны нулю, вспомогательными датчиками измеряют сигналы от мешающих изгибающих моментов всех колесных пар, не находящихся над основным датчиком. Преобразуют сигналы всех датчиков в среднеквадратичные напряжения. Приводят мешающие изгибающие моменты к координате расположения колесной пары над основным датчиком. После усреднения приведенных изгибающих моментов осуществляют компенсацию мешающих воздействий от колесных пар, не находящихся над основным датчиком, с учетом среднеквадратичных напряжений. Массу вагона определяют с учетом электромеханических чувствительностей основного и вспомогательных датчиков. 2 с.п.ф-лы, 4 ил.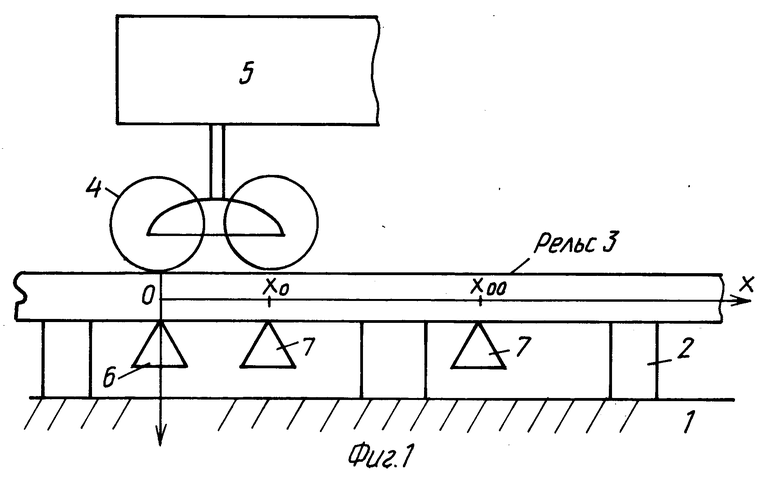
| US 4793429 A, 27.12.88 | |||
| RU 94017165 A, 10.01.96 | |||
| Устройство для регулирования амплитуды колебаний вибрационной машины | 1973 |
|
SU500971A1 |
| Управляемый делитель частоты следования импульсов | 1984 |
|
SU1221743A1 |
