Изобретение относится к измерительной технике, а конкретнее, к технике железнодорожных измерений.
Коэффициент относительной жесткости основания пути и рельса имеет вид (см. М.Ф. Вериго. Динамика вагонов. - М.: ВЗИИЖТ, 1971, с. 147:
где
U - модуль упругости основания пути;
El - жесткость изгибаемого рельса.
Коэффициент K может в значительной степени колебаться от типа рельс, срока их службы, состояния балласта, погодных факторов и др. Значения K необходимы при измерении веса вагонов для учета влияния соседних тележек на путь, а также при расчете допускаемых напряжений, возникающих в элементах пути. Поэтому, особенно при определении веса вагонов необходимо экспериментальное определение значения коэффициента K в реальном масштабе времени при движении состава при конкретных погодных условиях.
В известном способе (авт. св. N 1735124, кл. C 01 C 19/04). При наезде вагонной тележки на край весового рельса измерительные преобразователи вырабатывают сигнал пропорциональный вертикальным реакциям пути. Однако, учета влияния соседних тележек, определяемых коэффициентом K, не производится, что существенно снижает точность измерений весов вагонов.
Наиболее близким по технической сущности к предлагаемому является способ, описанный в книге М.Ф. Вериго. Динамика вагонов. - М.: ВЗИИЖТ, 1971, с. 168-172. В этом способе при движении опытновых составов по рельсовому пути определяют упругие вертикальные прогибы рельса под нагрузкой с помощью прогибомеров, определяют силы, передаваемые рельсом на шпалу, с помощью вертикальных силомеров, и определяют напряжения на площадке земляного полотна с помощью балластных мессдоз. Определение коэффициентов, характеризующих воздействие состава на путь, в частности K, осуществляют по результатам 20-50 поездок с каждой заранее установленной скоростью движения опытного состава.
Описанный способ реализуется с помощью устройства содержащего датчики и регистратор (см. там же).
Недостатком этого способа и реализующего его устройства является то, что определение коэффициента относительной жесткости пути и рельса K выполняется эпизодически в процессе работ с опытовым составом. При этом на момент реальной ситуации (погода, состояние рельсов и пути) значения этого коэффициента могут значительно отличаться от первоначально измеренного.
Задачей изобретения является оперативное определение в реальном масштабе времени коэффициента относительной жесткости пути и рельса K при движении состава, при реальных погодных условиях и состоянии пути.
Для решения поставленной задачи в способ определения коэффициента относительной жесткости пути и рельса в процессе движения состава, содержащий регистрацию данных о прогибе рельса под воздействием на рельс вагонной тележки введены новые операции, заключающиеся в том, что регистрируют электрический сигнал от датчика при прогибе рельса под каждой тележкой вагонов состава, каждый раз определяют по меньшей мере два расстояния между датчиком и опорной точкой ближнего к датчику колеса тележки, при которых наблюдаются нулевые значения прогиба рельса, и по данным о полученных расстояниях при воздействии всех тележек вагонов состава определяют среднее значение и дисперсию искомого коэффициента.
Для решения этой же задачи в устройство для определения коэффициента относительной жесткости основания пути и рельса, содержащее датчик прогиба рельса и регистратор прогиба рельса введены новые блоки: аналого-цифровой преобразователь, последовательно соединенные между собой вычислитель коэффициента относительной жесткости основания пути и рельса и индикатор значений искомого коэффициента, измеритель расстояния между датчиком и опорной точкой ближнего к датчику колеса тележки, при которых наблюдаются нулевые значения прогиба рельса, и блок управления устройством, первый, второй, третий, четвертый и пятый синхровыходы которого соединены соответственно с синхровходами аналого-цифрового преобразователя, регистратора прогиба рельса, упомянутого измерителя расстояний, вычислителя коэффициента относительной жесткости основания пути и рельса и упомянутого индикатора, при этом первый вход упомянутого вычислителя коэффициента соединен с регистратором прогиба рельса, вход измерителя расстояний соединен с выходом регистратора прогиба рельса, а выход - со вторым входом вычислителя коэффициента относительной жесткости основания пути и рельса, вход аналого-цифрового преобразователя соединен с датчиком прогиба рельса, а выход - с регистратором прогиба рельса.
Новые операции способа и новые блоки реализующего его устройства при их соответствующем соединении обеспечивают возможность определения значения коэффициента относительной жесткости пути и рельса в процессе движения конкретного состава, т. е. определение коэффициента K в реальном масштабе времени при данных погодных условиях и данном состоянии пути в момент прохождения состава.
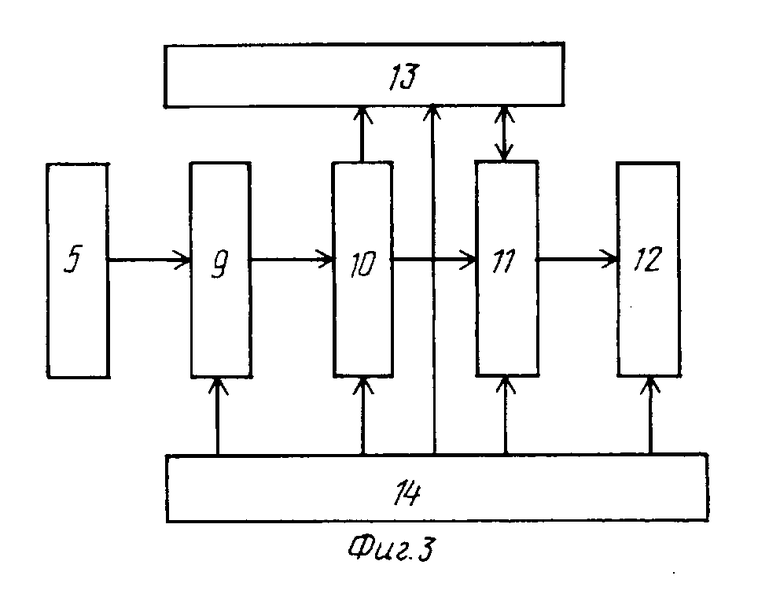
На фиг. 1 приведено пояснение к обоснованию предлагаемого способа; на фиг. 2 приведена кривая прогиба Y в функции координаты X; на фиг. 3 приведена блок-схема устройства, реализующего предлагаемый способу; на фиг. 4 приведена блок-схема блока управления устройством; на фиг. 5 приведена блок-схема измерителя расстояний; на фиг. 6 приведена блок-схема вычислителя коэффициента.
Для подтверждения осуществимости способа и возможности его практического применения приведем теоретическое доказательство.
Как известно (смотрите, например, М.Ф. Вериго. Динамика вагонов. - М.: ВЗИИЖТ, 1971, с. 148) прогиб рельса 1, опирающегося на шпалы 2 и балласт 3, вагона 4, измеряемый датчиком 5, определяется формулой для двуосной тележки с колесными парами 6 и 7 (фиг.1), имеет вид (кривая 8 на фиг. 2):
где:
K - коэффициент относительной жесткости основания пути и рельса;
η(kx) = l-KX(cosKX-sinKX);
P1, P2 - силы, передаваемые рельсу колесами тележки;
U - модуль основания упругости пути;
a - расстояние между осями тележки.
Тележка имеет подпятник, на которой опирается подпятник кузова, соединенные между собой шкворнем. Поэтому P1 = P2 = P и выражение (2) имеет вид:
Очевидно, что прогиб Y = 0 при условии
η(KX)+η(KX+Ka) = 0 (4)
Характер прогиба приведен на фиг. 2 в виде кривой 8. Видно, что кривая пересекает значение нуль в нескольких точках X. Из выражения (4) вытекает:
Так как  , то
, то
CosKX1 + SinKX1 + l-ka[CosK|X1+a| + SinK|X1+a|] = 0 (6)
После элементных тригонометрических преобразований можно найти
Откуда
Прогиб Y = 0 следующий раз будет наблюдаться при X2, когда
Следовательно
KX2-KX1= π (10)
Откуда, окончательно, получается простая формула для определения коэффициента относительной жесткости пути и рельса:
Таким образом, по измеренным расстояниям X2 и X1, при которых прогиб Y рельса равен нулю, можно определить коэффициент относительной жесткости основания пути и рельса.
Пример. В соответствии с операциями предлагаемого способа в процессе движения состава регистрировали с помощью датчика прогиб рельса под воздействием на него вагонной тележки, регистрировали электрический сигнал при прогибе рельса под каждой тележкой вагонов состава, каждый раз определяли по меньшей мере два расстояния между датчиком и опорной точкой ближнего к датчику колеса тележки, при которой наблюдались нулевые значения прогиба рельса: X1 = 219,9 см, X2 = 534,06 см. Было найдено K = 0,01. Осреднение по 20-ти тележкам показало среднее значение K = 0,01 при средне-квадратическом отклонении K = 2•10-3. Сопоставление с расчетным значением K по таблицам книги М. А. Чернышев. Практические методы расчета пути. - М.: Транспорт, 1967, показало вполне удовлетворительное совпадение результатов.
Предлагаемое устройство (фиг. 3) содержит последовательно соединенные датчики прогиба рельса 5, АЦП 9, регистратор прогиба рельса 10, вычислитель коэффициента 11, индикатор 12, также содержит измеритель расстояний 13, вход которого соединен с выходом регистратора прогиба 10, а выход со вторым входом вычислителя коэффициента 11, также содержит блок управления 14, первый, второй, третий, четвертый, пятый синхровыходы которого соединены с синхровходами АЦП 9, регистратора прогиба 10, измерителя расстояний 13, вычислителя 11 и индикатора 12 соответственно.
Блок управления 14 (фиг. 4) содержит последовательно соединенные генератор тактовых сигналов 15, первую 16, вторую 17, третью 18 и четвертую 19 линии задержек, синхровыходы которых соединены с синхровходами соответственно АЦП 9, регистратора 10, измерителя расстояний 13, вычислителя 11 и индикатора 12.
Измеритель расстояний 13 (фиг. 5) содержит управляемый таймер 20, вход которого соединен с выходом регистратора прогиба рельса 10, вычислитель расстояний 21, выход которого соединен со вторым входом вычислителя коэффициента 11, также содержит блок памяти скорости состава 22, выход которого соединен со вторым входом вычислителя расстояний 21, также содержит блок местного управления 23, первый, второй, третий синхровыходы которого соединены с синхровходами блоков управляемого таймера 20, блока памяти скорости состава 22 и вычислителя расстояний 21 соответственно, а синхровход соединен с синхровыходом блока управления устройством 14.
Блок местного управления 23 построен по типу, приведенному на фиг. 4.
Вычислитель коэффициента 11 (фиг. 6) содержит последовательно соединенные блок памяти расстояний X1 и X2 24, вход которого соединен с выходом измерителя расстояний 13, и арифметическое устройство вычисления K, его усреднения и определения дисперсии 25, выход которого соединен со входом индикатора 12, также содержит блок местного управления 26, первый и второй синхровыходы которого соединены с синхровходами блока памяти 24 и арифметического устройства 25, а синхровход - с синхровыходом блока управления устройством 14.
Работа устройства осуществляется следующим образом. Сигнал от датчика прогиба 5 преобразуется в электрическое напряжение, которое дискретизуется и квантуется в АЦП 9 и поступает на регистратор прогиба рельса 10. Здесь фиксируются моменты времени, когда Y = 0 и когда Y = max. В блоке 13 по отрезкам времени t1 и t2 между моментами, когда прогиб равен нулю и максимальным значением прогиба с учетом скорости движения состава находят данные о расстояниях X1 и X2. Эти данные поступают на вычислитель 11, который определяет коэффициент K для каждой тележки и затем усредняет по всей совокупности данных. Значения K и K поступают на индикатор 12. Блок управления 14 синхронизует работу устройства.
Блоки, входящие в устройство, известны из цифровой техники. Их создание не нуждается в изобретательском творчестве.
Таймер 20 в блоке измерения расстояний 13 представляет собой цифровой счетчик, который регистрирует импульсы от кварцевого генератора и с помощью цифрового компаратора с предустановкой в определенный момент времени генерирует выходной сигнал. Он служит для того, чтобы периодически в нужные моменты времени открывать или закрывать входную схему и позднее дать команду на считывание данных и сброс. Построение таймера 20 описано, например, в книге Х. Шмидт. Измерительная электроника в ядерной физике. - М.: Мир, 1989, с. 143, рис. 9.3.
В качестве датчиков используются тензорезисторы (см., например, М.Л. Дайчик, Н. Н. Пригоровский, г, Хуршудов. Методы и средства натурной тензометрии. - М.: Машиностроение, 1989, с. 119, с. 181.




Использование: для измерения параметров железнодорожного пути. Сущность изобретения: способ заключается в том, что регистрируют электрический сигнал при прогибе рельса под каждой тележкой вагонов состава, каждый раз определяют по меньшей мере два расстояния между датчиком и опорной точкой ближнего к датчику колеса тележки, при которых наблюдаются нулевые значения прогиба рельса, и по данным о полученных расстояниях при воздействии всех тележек вагонов состава определяют среднее значение и дисперсию искомого коэффициента. Устройство содержит датчик прогиба рельса, регистратор прогиба рельса, последовательно соединенные вычислитель коэффициента относительно жесткости основания пути и рельса и индикатор значения искомого коэффициента. Устройство также содержит измеритель расстояния между датчиком и опорной точкой ближнего к датчику колеса тележки, при которых наблюдаются нулевые значения прогиба рельса, и блок управления устройством. Изобретения обеспечат оперативное определение в реальном масштабе времени при движении состава упомянутого коэффициента. 2 с.п.ф-лы; 6 ил.
| Вериго М.Ф | |||
| Динамика вагонов | |||
| - М.: ВЗИИТ, 1971, с.147 - 148, 162 - 171. |
