Настоящее изобретение относится к системе непрерывного контроля электропроводимости по меньшей мере части системы энергопитания переменного тока, включающей в себя по меньшей мере один модуль, содержащий средство для формирования токовой составляющей постоянного тока между первой и второй точками, расположенными соответственно на первом и втором проводниках системы энергопитания, средство для измерения составляющей постоянного напряжения, подключенное между указанными первой и второй точками, и средство для детектирования нарушения электропроводимости, принимающее в расчет указанную составляющую постоянного напряжения, при этом средство для формирования токовой составляющей постоянного тока содержит управляемый выпрямитель и средство управления указанным управляемым выпрямителем.
Известные в практике системы контроля, например, описанная в заявке EP-A-430823, соответствующей патенту США N 5150057, не учитывают возможность присутствия в системе энергопитания паразитных токов постоянного напряжения.
Краткое изложение сущности изобретения
В основу настоящего изобретения положена задача создания системы, обеспечивающей исключение влияния паразитных токов постоянного напряжения.
Поставленная задача решается тем, что средство для управления указанным управляемым выпрямителем подает сигнал выключения управляемого выпрямителя в ходе первого имеющего заданную продолжительность периода измерительного цикла, а также сигналы управления, предназначенные для формирования указанной токовой составляющей постоянного тока в ходе второго имеющего заданную продолжительность периода измерительного цикла, при этом средство для измерения составляющей постоянного напряжения содержит средство для измерения первого и второго значений, соответственно представляющих указанную составляющую постоянного напряжения в ходе указанных первого и второго периодов, и средство для расчета разности между указанными первым и вторым значениями, представляющей составляющую постоянного тока, подлежащую измерению.
В соответствии с альтернативным вариантом осуществления настоящего изобретения система контроля включает в себя по меньшей мере один измерительный модуль и один параллельный модуль, каждый из которых содержит установленный в обратном по отношению друг к другу направлении управляемый выпрямитель и средство для управления указанным управляемым выпрямителем, при этом средства управления измерительного и параллельного модулей синхронизированы таким образом, чтобы осуществлять выключение указанных управляемых выпрямителей указанных модулей в ходе указанного первого периода.
Путем вычисления разности между составляющими постоянного тока на выводах измерительного и параллельного модулей, измерительные средства которых содержат средства для одновременного выборочного контроля измеряемых напряжений, становится возможным также исключить остаточные низкочастотные паразитные токи.
Краткое описание чертежей
Другие преимущества и отличительные признаки настоящего изобретения будут пояснены в дальнейшем при описании примеров осуществления изобретения со ссылками на сопровождающие чертежи, на которых:
Фиг. 1 изображает схему известной системы контроля электропроводимости.
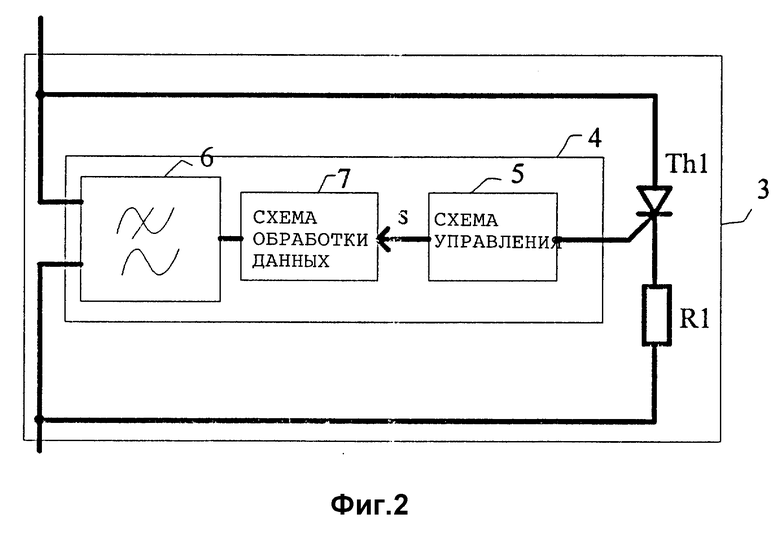
Фиг. 2 - измерительный модуль системы контроля в соответствии с конкретным вариантом осуществления изобретения.
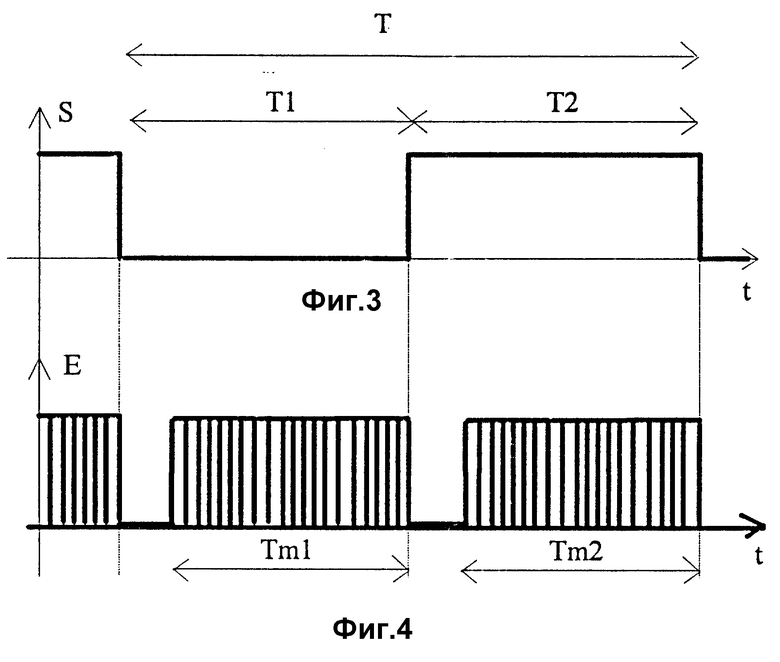
Фиг. 3, 4 - соответственно периоды ввода сигналов и измерения по конкретному варианту осуществления изобретения.
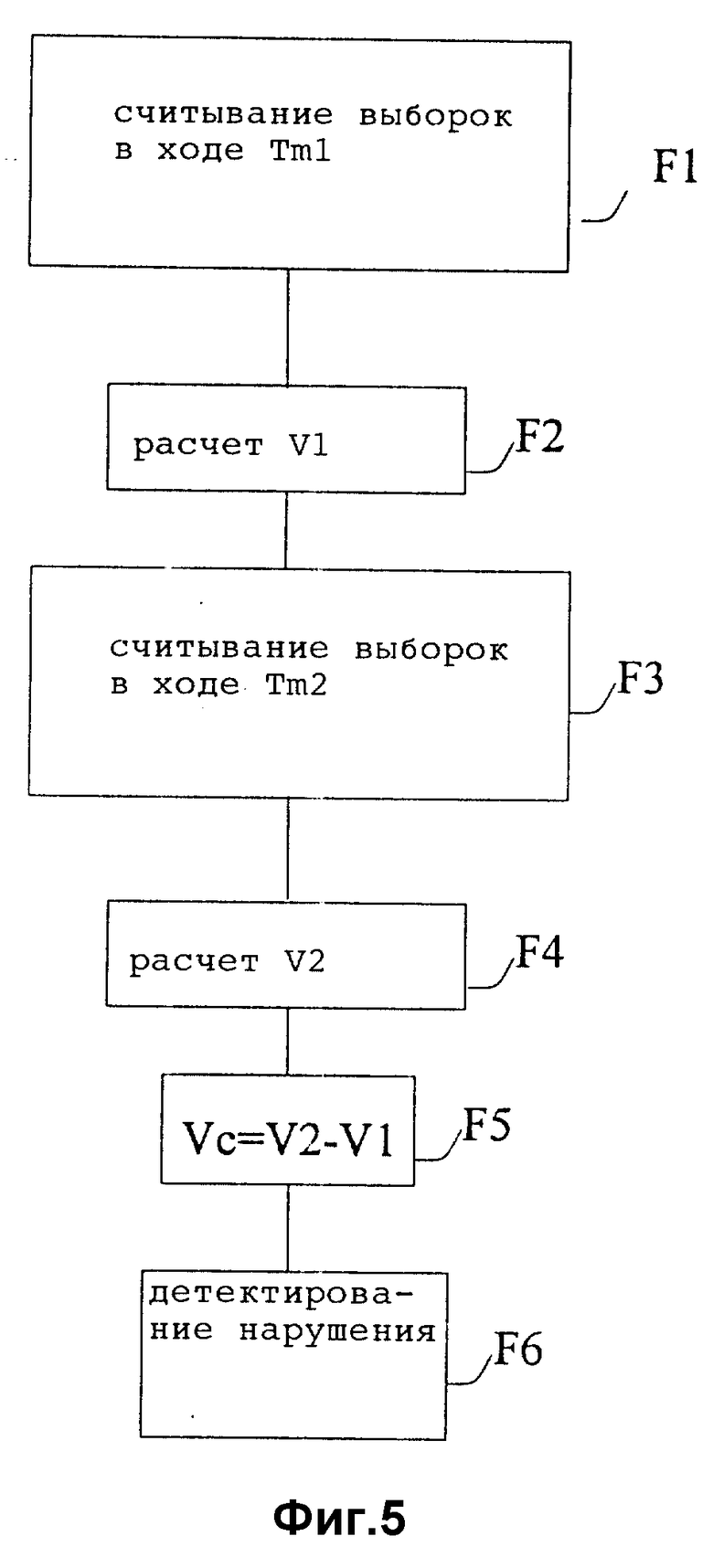
Фиг. 5 - операционную блок-схему модуля системы контроля в соответствии с настоящим изобретением.
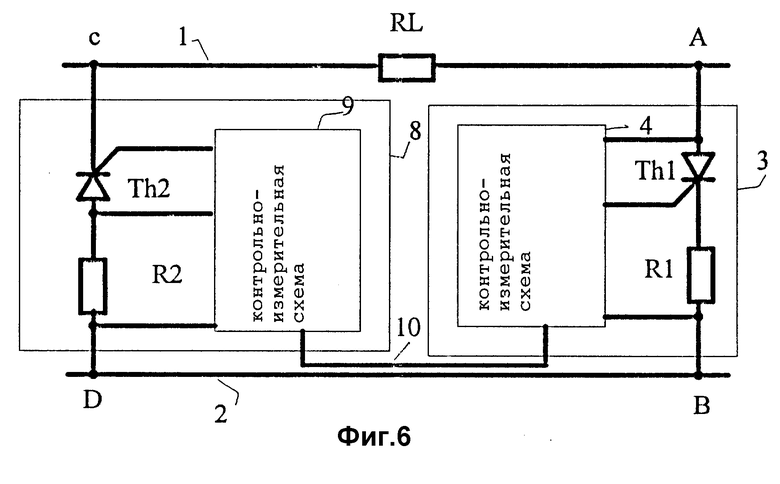
Фиг. 6 - альтернативный вариант осуществления изобретения с измерительным и параллельным модулями.
Подробное описание предпочтительного варианта осуществления изобретения
Известная в практике система контроля, представленная на фиг. 1, предназначена для осуществления контроля электропроводимости части однофазной системы энергопитания переменного тока, включающей в себя два проводника 1 и 2. Измерительный модуль 3 включает в себя два вывода, подсоединяемых к точкам A и B, расположенным соответственно на каждом из проводников 1 и 2. Резистор RL схематически обозначает сопротивление линии системы энергопитания вверх по ходу линии от точек A и B. Измерительный модуль 3 содержит средство для формирования токовой составляющей постоянного тока. На фиг. 1 это средство образовано тиристором Th1, последовательно соединенным с резистором R1 между выводами измерительного модуля 3. Контрольно-измерительная схема 4 подает сигналы управления на управляющий электрод тиристора Th1 с целью обеспечения в измерительном модуле прохождения токовой составляющей постоянного тока Ic заданной величины. Контрольно-измерительная схема 4 подсоединена к выводам измерительного модуля таким образом, чтобы принимать на вход напряжение между точками A и B. Когда токовая составляющая постоянного тока имеет постоянную величину, колебания составляющей постоянного напряжения между точками A и B представляют колебания сопротивления линии RL вверх по ходу линии от точек A и B. Схема 4 определяет увеличение указанной составляющей постоянного напряжения, представляющее увеличение сопротивления линии RL, сравнивает значение этого увеличения с заданным пороговым значением и выдает сигнал нарушения электропроводимости, когда это пороговое значение превышается.
Измерительный модуль 3 представлен более подробно на фиг. 2. Контрольно-измерительная схема 4 представлена в виде блок-схемы и содержит блок управления 5, фильтр нижних частот 6 и схему обработки данных 7. Напряжение на выводах измерительного модуля подается на вход фильтра нижних частот 6, который подает на схему обработки данных 7 сигнал напряжения, соответствующий постоянной составляющей его входного напряжения.
Как показано на фиг. 3, цикл измерения Т, имеющий длительность, превышающую длительность периода сети энергопитания, делится на два периода - T1 и T2. В течение первого периода T1 схема управления 5 отключает тиристор Th1. В это время измерительный модуль 3 не формирует никакой постоянной составляющей тока. В ходе второго периода T2 схема управления 5 осуществляет контроль поступления в систему энергопитания токовой составляющей постоянного тока 1c. Синхросигналы S, графически представленные на фиг. 3 в функции времени, подаются на схему обработки данных 7 схемой управления 5, для снабжения схемы обработки данных информацией, представляющей периоды T1 и T2.
На фиг. 4 представлен процесс выборочного контроля схемой обработки данных 7 сигналов E постоянной составляющей напряжения, поступающей от фильтра 6. Схема обработки данных 7 выполняет первую выборку на протяжении первого измерительного окна интервала TmI в пределах периода T1. Вторая выборка осуществляется на протяжении второго измерительного окна Tm2 в пределах периода T2. Окно Tm1 имеет продолжительность меньшую или равную T1, а окно Tm2 имеет продолжительность, меньшую или равную T2. В предпочтительном варианте осуществления изобретения, показанном на фиг. 4, период стабилизации (T1 - Tm1; Т2 - Тm2) предусмотрен в начале каждого периода перед началом соответствующего измерительного окна.
На фиг. 5 представлены блок-схема операционной программы схемы обработки данных 7. На первом этапе F1 схемы 7 считывает выборки, представляющие выходное напряжение фильтра 6 в входе первого окна Tm1. Затем, в ходе второго этапа F2, она по этим выборкам рассчитывает первое значение V1, представляющее величину токовой составляющей входного напряжения измерительного модуля 3 на протяжении окна Tm1. Затем, на этапе F3, схема обработки данных 7 считывает выборки, представляющие выходное напряжение фильтра 6 на протяжении второго окна Tm2. Затем, в ходе четвертого этапа F4, она рассчитывает второе значение V2, представляющее величину токовой составляющей входного напряжения измерительного модуля 3 на протяжении окна Tm2.
В течение периода T1, в отсутствие входной токовой составляющей постоянного тока от измерительного модуля, подаваемое на выводы модуля постоянное напряжение представляет паразитные составляющие постоянного тока, или сдвиговые напряжения системы электропитания. В течение периода T2, когда измерительный модуль вводит в систему энергопитания токовую составляющую постоянного тока, подаваемое на выводы модуля постоянное напряжение представляет сумму паразитных составляющих постоянного тока и подлежащей измерению составляющей постоянного напряжения Vc для определения сопротивления линии. Разность V2 - V1, рассчитанная схемой обработки данных 7 на этапе F5, представляет таким образом постоянную составляющую тока Vc. На этапе F6 схема обработки данных определяют возможное наличие нарушений электропроводимости, отслеживая изменения количественного показателя, представляющего сопротивления линии и производного от разности Vc = V2 - V1, пропорциональной этому показателю.
Периоды T1 и T2 в предпочтительном случае равны по длительности, как показано на фиг. 3. В качестве примера, не носящего ограничительный характер, продолжительность периода T может составлять несколько секунд, например, 10 сек. , при этом периоды T1 и T2 имеют продолжительность, равную T/2, а окна Tm1 и Tm2 имеют аналогичную продолжительность, например около 3 сек.
В соответствии с предпочтительным вариантом осуществления изобретения значения V1 и V2 получаются расчетом среднего значения из соответствующих выборок, соответственно полученных на протяжении измерительных окон Tm1 и Tm2. Используя средние значения, схема обработки данных выполняет дополнительную функцию фильтрации, которая позволяет исключать основную часть низкочастотных составляющих системы энергопитания.
Для достижения более надежного подавления низкочастотных паразитных токов в системе энергопитания может быть предпочтительно рассчитать значения V1 и V2 по соответствующим выборкам, используя среднее взвешенное значение. Для этой цели прямоугольные окна, представленные на фиг. 4, могут быть замещены окнами, имеющими синусоидальную или любую иную удобную для расчетов форму. При использовании такой оценки средневзвешенных значений в расчетах V1 и V2 их разность по-прежнему представляет подлежащую измерению постоянную составляющую напряжения Vc.
Определение нарушения может осуществляться непосредственным сравнением колебаний значения Vc с заданным пороговым значением. Представляется возможным осуществление расчета значения сопротивления линии RL, пропорционального Vc, с последующим сравнением его изменений с заданным пороговым значением с целью выявления нарушения. Если, как предложено в некоторых вариантах осуществления, описанных в заявке EP-A-430823, значение сопротивления линии получается из отношения постоянной составляющей Vc и постоянной составляющей напряжения на выводах резистора RL или измерительного шунта, то изложенный выше принцип измерения применим также и к измерению указанного напряжения, которое отфильтровывается и проходит соответствующую выборку на протяжении окон Tm1 и Tm2 и составляющая постоянного тока которого равна разности между средними, возможно средневзвешенными, значениями выборок, полученных соответственно на протяжении окон Tm1 и Tm2.
В вышеупомянутой заявке использование параллельных модулей позволяет осуществлять контроль части системы энергопитания, расположенной между измерительным и параллельным модулями. Согласно данной заявке, параллельный модуль может быть конструктивно аналогичен измерительному модулю, показанному на фиг. 1, при этом контрольно-измерительная схема предусматривает наличие сервосистемы для регулирования постоянной составляющей подаваемого на входы схемы напряжения до нулевого значения.
Если измерительный модуль использует принцип измерения, изложенный выше со ссылками на фиг. 3 и 5, то работа параллельного модуля, который может применяться в системе, должна последовательно согласовываться с работой измерительного модуля. На фиг. 6 показана система в соответствии с настоящим изобретение, обеспечивающая осуществление контроля электропроводимости части системы энергопитания, расположенной между точками A и B, к которым подсоединен измерительный модуль 3, и точками C и D, которые расположены соответственно на проводниках 1 и 2 вверх по ходу линии от точек A и B, и к которым подсоединен параллельный модуль 8.
Параллельный модуль 8 включает в себя средство для закольцовывания постоянной составляющей тока, формируемой измерительным модулем 3. Как показано на фиг. 6, тиристор Th2, соединенный последовательно с резистором R2, подключен между точками C и D, обеспечивая таким образом прохождение тока от проводника 2 к проводнику 1, т.е. в направлении, обратном направлению тиристора Th1. Модуль 8 включает в себя контрольно-измерительную схему 9, синхронизированную с контрольно-измерительной схемой измерительного модуля 3, например, с помощью линии синхронизации 10. Синхронизация обеспечивает возможность одновременного выключения тиристоров Th1 и Th2 в течение периода T1 и их одновременного включения в течение периода T2. Составляющая постоянного напряжения Vc (CD) на выводах параллельного модуля 8 измеряется таким же образом, что и составляющая постоянного напряжения Vc(AB) на выводах измерительного модуля 3, и их разность Vc (AB) - Vc (CD) представляет значение составляющей постоянного напряжения на выводах сопротивления линии RL задействуемой части системы энергопитания. Одновременная выборка постоянных напряжений, присутствующих на выводах измерительного и параллельного модулей, обеспечивает возможность подавления остаточных низкочастотных паразитных токов. Составляющие постоянного тока, измеряемые соответственно на протяжении измерительных окон Th1 и Th2 между точками A и B и, соответственно, C и D, могут быть, по существу, разделены следующим образом:
V1 (AB) = Vof1 + V1F 1
V1 (CD) = Vof2 + V1f 1
V2 (AB) = V (AV) + Vof 1 + Vlf 2
V2 (CD) = V (CD) + Vof 2 + V1f 2,
где V1 (AB) и V1 (CD) - этой постоянные составляющие тока, измеряемые на протяжении окна Tm1 между точками A и B и, соответственно, C и D;
V2 (AB) и V2 (CD) - соответствующие составляющие, измеряемые на протяжении окна Tm2;
Vof1 - напряжение сдвига между A и B, рассматриваемое как неизменяющееся на протяжении периода T;
Vof 2 - напряжение сдвига между C и D, рассматриваемое как неизменяющееся на протяжении периода T;
Vlf 1 - остаточный низкочастотный шум в течение периода T1 и окна Tm1;
Vlf 2 - остаточный низкочастотный шум в течение периода T2 и окна Tm2;
V (AB) и V (CD) - постоянные составляющие тока с исключенными паразитными составляющими, измеряемые на выводах измерительного и параллельного модулей.
Проверка позволяет подтвердить, что сдвиговые напряжения подавляются при осуществлении соответствующих расчетов разности Vc (AB) = V2 (AB) - V1 (AB) и Vc (CD) = V2 (CD) - V1 (CD), и что остаточный шум подавляется расчетом разности Vc (AB) - Vc (CD), что служит базой для контроля электропроводимости.
Настоящее изобретение не ограничивается конкретно изложенными выше примерами осуществления. В частности, тиристоры могут быть заменены любыми другими управляемыми выпрямителями, а резистор R1 может быть заменен не приводящей к потерям мощности схемой, согласованной с системой энергопитания. Фильтры нижних частот могут быть аналоговыми или цифровыми. Контрольно-измерительные схемы могут включать в себя микропроцессоры, а некоторые схемные элементы могут быть общими для нескольких схем.
Контрольно-измерительные схемы 4 и 9 системы контроля по фиг. 6 могут быть подсоединены к централизованной схеме обработки данных, осуществляющей расчет разности Vc (AB) - Vc (CD) либо эта разность может рассчитываться одним из модулей системы, информирующим о наружении электропроводимости при обнаружении последнего.
Когда система включает в себя параллельный модуль, указанный параллельный модуль должен быть синхронизирован с измерительным модулем с целью блокировки прохождения любого тока в течение периода T1. Тиристоры Th1 и Th2 в предпочтительном случае синхронизируются также в течение периода T2. Однако целесообразно предусмотреть возможность регулирования составляющей постоянного напряжения на выводах параллельного модуля до нулевого значения в течение периода T2, тогда как составляющая постоянного напряжения на выводах измерительного модуля будет непосредственно представлять сопротивление линии.
Эти же принципы измерения применимы и к трехфазным системам энергопитания; в этом случае модули контроля подсоединяются между двумя фазами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАЩИТНЫЙ ИНТЕРФЕЙС МОЩНОСТИ | 1994 |
|
RU2124228C1 |
| МОДУЛЬНЫЙ МНОГОПОЛЮСНЫЙ ВЫКЛЮЧАТЕЛЬ | 1994 |
|
RU2126566C1 |
| КОНТРОЛЬНО-КОМАНДНАЯ СИСТЕМА ЗАЩИТЫ | 1994 |
|
RU2134898C1 |
| ЭЛЕКТРИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1994 |
|
RU2127924C1 |
| ПРИВОДНОЙ МЕХАНИЗМ ДЛЯ ТРЕХПОЗИЦИОННОГО ПЕРЕКЛЮЧАТЕЛЯ | 1993 |
|
RU2126565C1 |
| МНОГОУРОВНЕВЫЙ ИНВЕРТОР | 2014 |
|
RU2655912C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657480C1 |
| СИСТЕМА УПРАВЛЕНИЯ УПРАВЛЯЕМОГО ВЫПРЯМИТЕЛЯ НАПРЯЖЕНИЯ | 2015 |
|
RU2622043C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2012 |
|
RU2559042C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2012 |
|
RU2570804C2 |
Система контроля электропроводимости включает в себя по меньшей мере один измерительный модуль, подсоединенный между двумя проводниками системы энергопитания. Измерительный цикл делится на два периода. В течение первого периода модуль осуществляет измерение (F1, F2) первой постоянной составляющей напряжения (V1), представляющей паразитные составляющие постоянного тока, подаваемого на выводы модуля. В течение второго периода измерительный модуль вводит в систему энергопитания постоянную составляющую тока и осуществляет измерение (F3, F4) второй постоянной составляющей (V2) напряжения, подаваемого на выводы модуля. Разность (Vc) между второй и первой составляющими используется для определения нарушения электропроводимости, при этом сопротивление линии вверх по ходу линии от измерительного модуля пропорционально этой разности (Vc). Первая и вторая составляющие (V1, V2) получаются расчетом средних (при необходимости средневзвешенных значений выборок постоянных напряжений, измеряемых в течение измерительных периодов) T m 1, T m 2), имеющих длительность меньшую или равную длительности указанных первого и второго периодов. Технический результат - исключение остаточных низкочастотных паразитных токов. 9 з.п. ф-лы, 6 ил.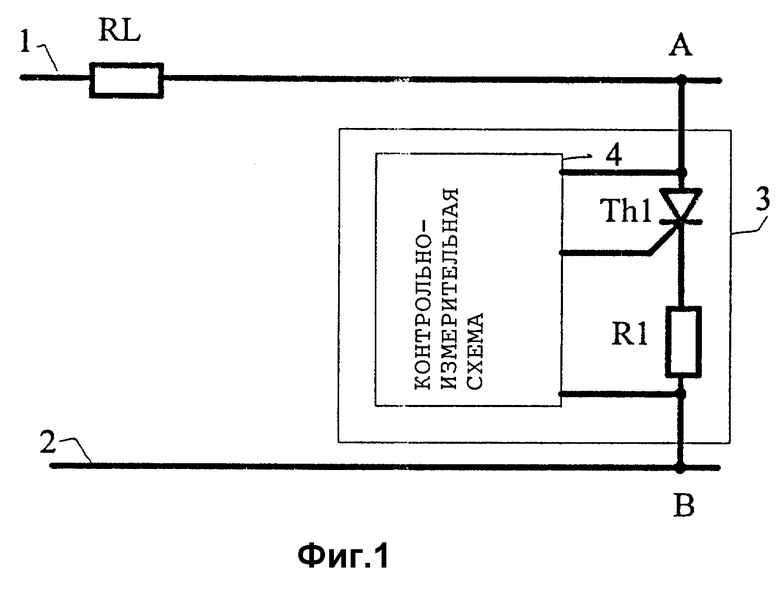
| US, патент, 5150057, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
