ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к устройству преобразования электрической мощности.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] Известно устройство управления для управления преобразователем электрической мощности, которое содержит: PWM-выпрямитель (ШИМ-выпрямитель), который выполняет преобразование переменного тока в постоянный ток; и инвертор, подключенный к PWM-выпрямителю, чтобы выполнять инвертирование постоянного тока в переменный ток, причем устройство управления включает в себя: средство двухпозиционной фазовой модуляции для формирования команды управления выходным напряжением, чтобы выполнять двухпозиционную фазовую модуляцию для инвертора; первое средство вычисления величины компенсации для вычисления величины компенсации, корректирующей команду управления выходным напряжением, чтобы компенсировать ошибку выходного напряжения, сформированную, когда выполняется двухпозиционная фазовая модуляция для инвертора; средство формирования PWM-шаблонов инвертора для формирования PWM-импульсов для полупроводниковых переключающих элементов PWM-выпрямителя на основе команды управления входным током; средство определения переключения для определения присутствия или отсутствия переключения PWM-выпрямителя; средство определения абсолютной величины напряжения для определения напряжения максимальной фазы, напряжения средней фазы и напряжения минимальной фазы из входного напряжения каждой фазы; и средство определения полярности для определения полярности тока нагрузки, при этом первое средство вычисления величины компенсации вычисляет величину компенсации, корректирующую команду управления выходным напряжением, с использованием вывода средства определения абсолютной величины напряжения, вывода средства определения полярности, вывода средства определения переключения, частоты переключения инвертора и мертвого времени.
[0003] Тем не менее, возникает проблема в том, что известное устройство управления для устройства преобразования электрической мощности компенсирует только ошибку напряжения, сформированную согласно коммутации, но не может предотвращать само нарушение коммутации.
[0004] Патентный документ 1. Первая публикация заявки на патент (Япония) (tokkai) номер 2006-20384.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0005] Задача настоящего изобретения заключается в том, чтобы предоставить устройство преобразования электрической мощности, которое может предотвращать нарушение коммутации.
[0006] Вышеописанная задача может решаться посредством настоящего изобретения таким образом, что в случае, если осуществляется переход состояния от первого времени переключения ко второму времени переключения, из переключающих элементов, каждый из которых находится во включенном состоянии, один из переключающих элементов одной из схемы верхнего плеча или схемы нижнего плеча выключается, и включенное состояние другого из переключающих элементов во включенном состоянии другой схемы плеча поддерживается.
[0007] Согласно настоящему изобретению, в случае если осуществляется переход состояния от первого времени переключения ко второму времени переключения, один из переключающих элементов, который находится во включенном состоянии, переключается, а состояние другого из переключающих элементов фиксируется. Таким образом, уменьшается число раз, когда выполняется переключение, и может предотвращаться возникновение нарушения коммутации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг.1 является блок-схемой зарядной системы, включающей в себя устройство преобразования электрической мощности, в предпочтительном варианте осуществления согласно настоящему изобретению.
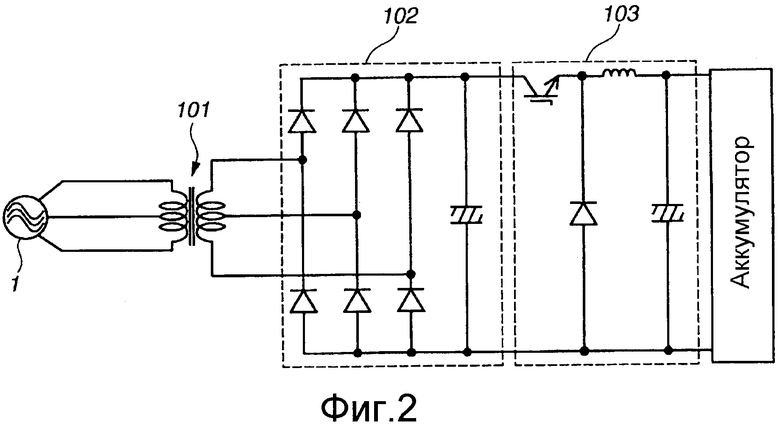
Фиг.2 является блок-схемой зарядной системы в первом сравнительном примере.
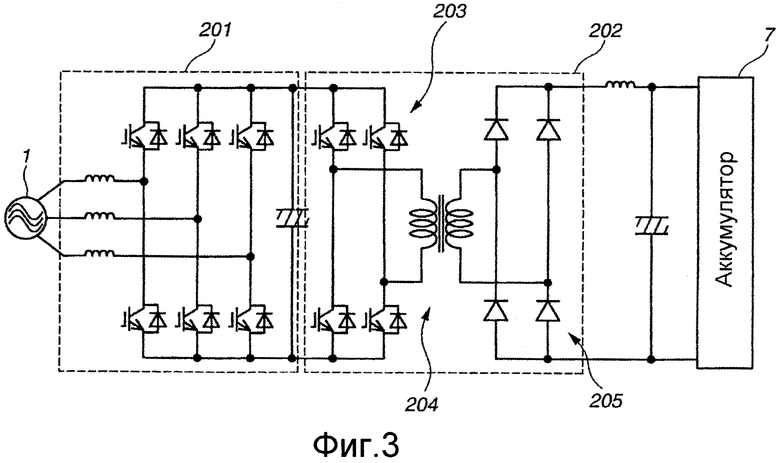
Фиг.3 является блок-схемой зарядной системы во втором сравнительном примере.
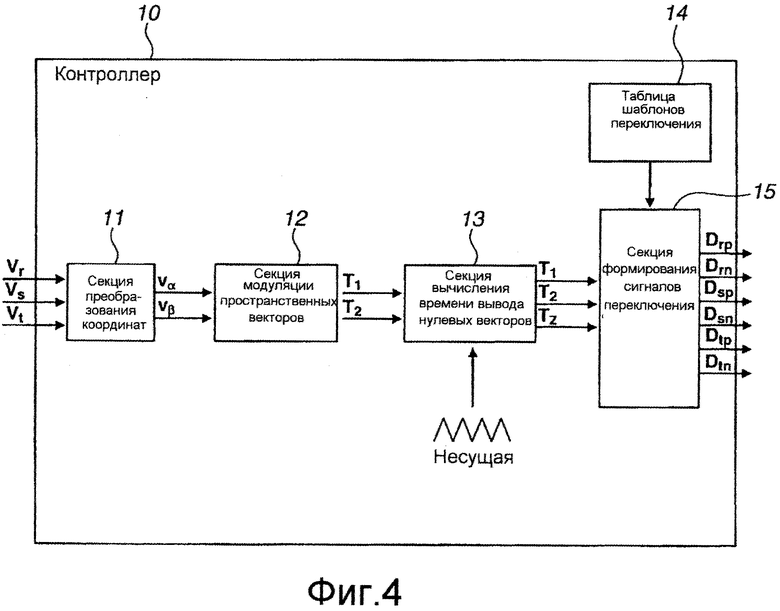
Фиг.4 является блок-схемой контроллера, управляющего устройством преобразования электрической мощности, показанным на фиг.1.
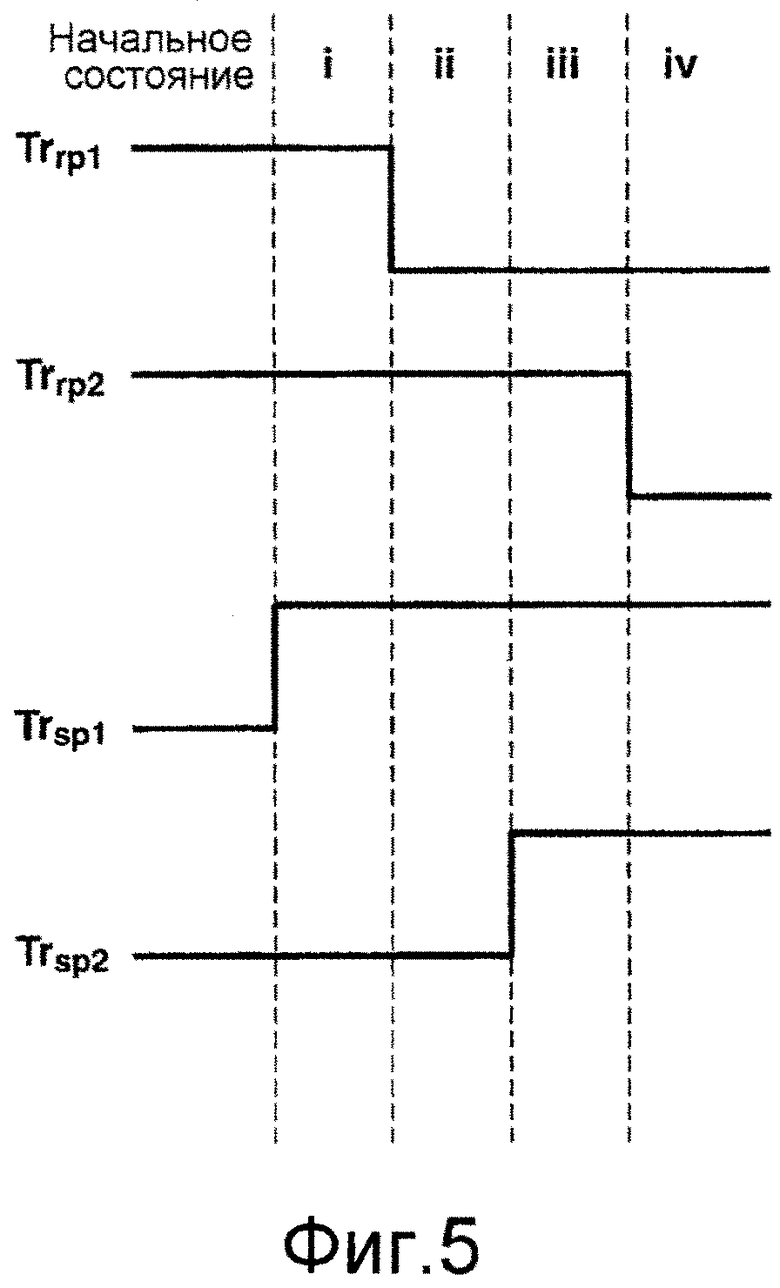
Фиг.5 является графиком, представляющим последовательность переключения элемента переключения R-фазы, показанного на фиг.1.
Фиг.6 является схемой, представляющей взаимосвязь между базисным вектором и вектором напряжения в секции модуляции пространственных векторов, показанной на фиг.4.
Фиг.7(a) является схемой, которая представляет собой добавление шаблона переключения на векторную диаграмму по фиг.6, и фиг.7(b) является принципиальной схемой источника 1 питания переменного тока и матричного преобразователя 4 в зарядной системе, показанной на фиг.1.
Фиг.8 является концептуальной схемой таблицы шаблонов переключения по фиг.4.
Фиг.9(1)-(6) являются схемами для пояснения переходов состояний переключающих элементов на фиг.1.
Фиг.10 является графиком, представляющим взаимосвязь между несущей и временем вывода в контроллере на фиг.4.
Фиг.11 является графиком, представляющим форму сигнала выходного напряжения матричного преобразователя на фиг.1.
Фиг.12 является графиком, представляющим другую форму сигнала выходного напряжения матричного преобразователя на фиг.1.
Фиг.13 является графиком, представляющим взаимосвязь между несущей и значением команды управления и формой сигнала выходного напряжения в устройстве инвертора в третьем сравнительном примере.
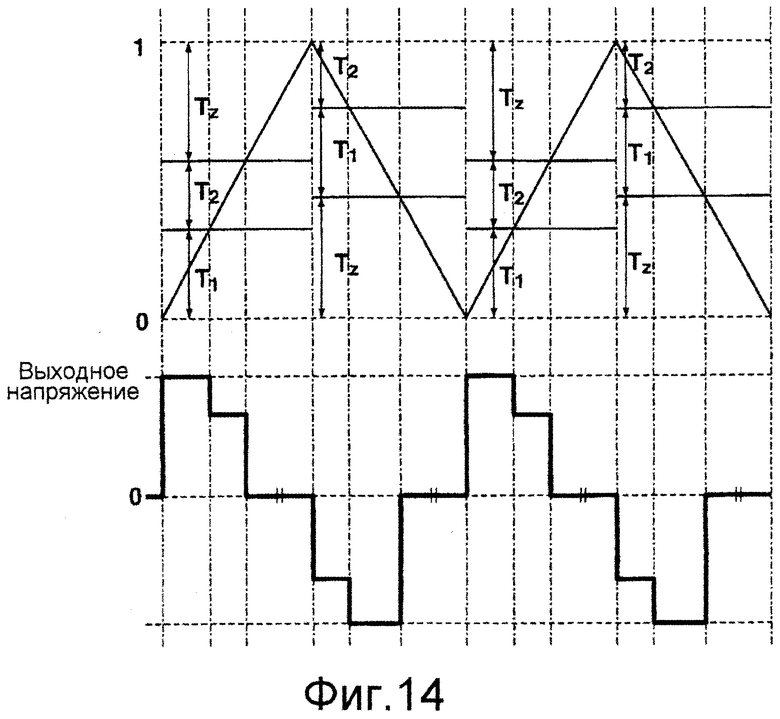
Фиг.14 является графиком, представляющим взаимосвязь между несущей и временем вывода и формой сигнала выходного напряжения в контроллере, показанном на фиг.4.
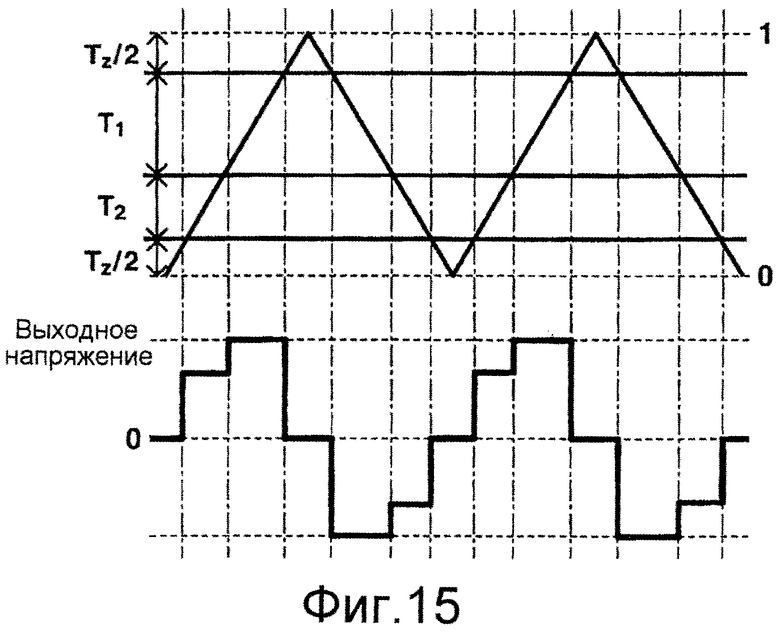
Фиг.15 является графиком, представляющим взаимосвязь между несущей и временем вывода и формой сигнала выходного напряжения в устройстве преобразования электрической мощности в модификации предпочтительного варианта осуществления согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] В дальнейшем в этом документе описывается предпочтительный вариант осуществления согласно настоящему изобретению на основе чертежей.
Первый предпочтительный вариант осуществления
Фиг.1 является блок-схемой аккумуляторной системы, включающей в себя устройство преобразования электрической мощности, связанное с предпочтительным вариантом осуществления согласно настоящему изобретению.
В дальнейшем в этом документе в качестве примера поясняется случай, в котором устройство преобразования электрической мощности в этом варианте осуществления применяется к зарядной системе, но этот вариант осуществления может применяться к транспортному средству и т.п., включающему в себя электродвигатель, и к устройству управления, управляющему электродвигателем, и т.п.
[0010] Зарядная система в этом варианте осуществления включает в себя: источник 1 питания переменного тока; входной фильтр 2; датчики 31-33 напряжения; матричный преобразователь 4; схему 5 высокочастотного трансформатора; выходной фильтр 6; и аккумулятор 7.
[0011] Источник 1 питания переменного тока является источником питания трехфазного переменного тока и предоставляет источник электрической мощности для зарядной системы. Входной фильтр 2 является фильтром для выпрямления электрической мощности переменного тока, вводимой из источника 1 питания переменного тока, и сконструирован посредством LC-схем, имеющих катушки 21, 22, 23 и конденсаторы 24, 25, 26. Катушки 21, 22, 23 подключаются между соответствующими фазами источника 1 питания переменного тока и матричного преобразователя 4. Конденсаторы 24, 25, 26 подключаются между катушками 21, 22, 23 и подключаются между соответствующими фазами.
[0012] Датчики 31, 32, 33 напряжения подключаются между источником 1 питания переменного тока и матричным преобразователем 4, чтобы определять входное напряжение (Vr, Vs, Vt) каждой фазы из источника 1 питания переменного тока в матричный преобразователь 4, и выводит определенные напряжения в контроллер 10, как описано ниже. Датчик 31 напряжения подключается к средней точке R-фазы матричного преобразователя 4, датчик 32 напряжения подключается к средней точке S-фазы матричного преобразователя 4, и датчик 33 напряжения подключается к средней точке T-фазы матричного преобразователя 4.
[0013] Матричный преобразователь 4 содержит множество двунаправленно переключаемых переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn, преобразует электрическую мощность переменного тока, введенную из источника электрической мощности переменного тока 1, в высокочастотную электрическую мощность переменного тока и выводит высокочастотную электрическую мощность переменного тока в схему 5 высокочастотного трансформатора. Матричный преобразователь 4 подключается между входным фильтром 2 и схемой 5 высокочастотного трансформатора. Переключающий элемент Srp, чтобы предоставлять двунаправленно переключаемый элемент, включает в себя: транзистор Trrp1, к примеру, MOSFET-транзистор или IGBT-транзистор; транзистор Trrp2, к примеру, MOSFET-транзистор или IGBT-транзистор; диод DrP1; и диод DrP2. Транзистор Trrp1 и транзистор Trrp2 последовательно подключаются друг к другу во взаимно противоположных направлениях, и диод DrP1 и диод DrP2 последовательно подключаются друг к другу во взаимно противоположных направлениях, транзистор Trp1 и диод DrP1 подключаются параллельно друг другу во взаимно противоположных направлениях, транзистор Trrp2 и диод DrP2 подключаются параллельно друг другу во взаимно противоположных направлениях. Аналогично, другие переключающие элементы Srn, Ssp, Ssn, Stp, Stn сконструированы посредством мостовой схемы из транзисторов Trrn1, Trrn2 и диодов Drn1, Drn2, мостовой схемы из транзисторов Trsp1, Trsp2 и диодов Dsp1, Dsp2, мостовой схемы из транзисторов Trsn1, Trsn2 и диодов Dsn1, Dsn2, мостовой схемы из транзисторов Trtp1, Trtp2 и диодов Dtp1, Dtp2 и мостовой схемы из транзисторов Trtn1, Trtn2 и диодов Dtn1, Dtn2.
[0014] Другими словами, три из пары схем, в которых последовательно подключаются два переключающих элемента Srp, Srn, Ssp, Ssn, Stp, Stn, подключаются параллельно к первичной стороне трансформатора 51. Затем, мостовая схема, в которой три линии, подключенные между соответствующими парами переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn, электрически подключены к трем секциям вывода фазы источника 1 питания переменного тока, составляет матричный преобразователь 4 трехфазного тока в однофазный.
[0015] Схема 5 высокочастотного трансформатора содержит трансформатор 51 и выпрямительную мостовую схему 52 и подключается между матричным преобразователем 4 и выходным фильтром 6. Схема 5 высокочастотного трансформатора преобразует высокочастотную электрическую мощность переменного тока, введенную из матричного преобразователя 4, в электрическую мощность постоянного тока и подает электрическую мощность постоянного тока в аккумулятор 7 через выходной фильтр 6. Трансформатор 51 повышает напряжение высокочастотного переменного тока, введенное из матричного преобразователя 4, и выводит этот повышенный переменный ток в выпрямительную мостовую схему 52. Следует отметить, что поскольку электрическая мощность переменного тока, выведенная из матричного преобразователя 4, является высокочастотной, трансформатор небольшого размера может быть использован в качестве трансформатора 51. Выпрямительная мостовая схема 52 является схемой, в которой множество диодов подключаются в мостовой конфигурации, и служит для того, чтобы преобразовывать переменный ток вторичной стороны трансформатора 51 в постоянный ток.
[0016] Выходной фильтр 6 сконструирован посредством LC-схемы из катушки 61 и конденсатора 62 и подключается между схемой 5 высокочастотного трансформатора и аккумулятором 7. Выходной фильтр 6 выпрямляет электрическую мощность постоянного тока, выведенную из схемы 5 высокочастотного трансформатора, и подает электрическую мощность постоянного тока в аккумулятор 7. Аккумулятор 7 является вторичным элементом, заряженным посредством зарядной системы в этом варианте осуществления, и сконструирован, например, посредством литий-ионного перезаряжаемого аккумулятора. Аккумулятор 7, например, монтируется в транспортном средстве и предоставляет динамичный источник (мощности) транспортного средства.
[0017] Таким образом, зарядная система в этом варианте осуществления преобразует переменный ток из источника 1 питания переменного тока в высокочастотный переменный ток, повышает высокочастотный переменный ток через схему 5 высокочастотного трансформатора, преобразует повышенный переменный ток в постоянный ток и подает повышенную электрическую мощность постоянного тока и высокого напряжения в аккумулятор 7.
[0018] Признаки зарядной системы, показанной на фиг.1 с использованием устройства преобразования электрической мощности в этом варианте осуществления, поясняются в сравнении со сравнительным примером 1 и другим сравнительным примером 2, описанными ниже. Фиг.2 показывает блок-схему зарядной системы, связанной со сравнительным примером 1, и фиг.3 показывает блок-схему зарядной системы, связанной со сравнительным примером 2.
В качестве зарядной системы, отличающейся от предпочтительного варианта осуществления согласно настоящему изобретению, известна такая система, как показано на фиг.2, в которой электрическая мощность переменного тока, поданная из источника 1 питания переменного тока, пропускается через трансформатор 101 и преобразуется в электрическую мощность постоянного тока через выпрямитель 102 (сравнительный пример 1).
Помимо этого, в качестве другой зарядной системы, отличающейся от зарядной системы в этом варианте осуществления, известна система, как показано на фиг.3, в которой переменный ток из источника 1 питания переменного тока преобразуется в постоянный ток через PWM-выпрямитель 201, постоянный ток инвертируется в переменный ток через схему 203 инвертора первичной стороны схемы 202 высокочастотного трансформатора, преобразованный переменный ток повышается посредством трансформатора 204, повышенный переменный ток преобразуется в постоянный ток через выпрямительную мостовую схему 205 схемы 202 высокочастотного трансформатора, и постоянный ток подается в аккумулятор 7 (сравнительный пример 2).
[0019] В случае сравнительного примера 1, схемная структура является простой, но трансформатор 101 становится крупным. Помимо этого, существует такая проблема, что появляется необходимость подключать электролитический конденсатор большой емкости между выпрямителем 102 и прерывателем повышения напряжения 103.
В случае сравнительного примера 2, хотя трансформатор небольшого размера может быть использован в качестве трансформатора 204, потери становятся большими, поскольку число преобразований является большим. Помимо этого, существует такая проблема, что необходимо подключать электролитический конденсатор большой емкости между PWM-выпрямителем 201 и высокочастотным трансформатором 202.
[0020] В этом варианте осуществления, поскольку, как описано выше, использование матричного преобразователя 4 позволяет уменьшать потери, вызываемые посредством преобразования электрической мощности, позволяет делать необязательным электролитический конденсатор большой емкости на первичной стороне трансформатора 51 и позволяет достигать небольших размеров трансформатора 51.
[0021] Далее поясняется контроллер 10, управляющий матричным преобразователем 4, содержащемся в устройстве преобразования электрической мощности в этом варианте осуществления, на фиг.4. Фиг.4 показывает блок-схему контроллера 10. Контроллер 10 включает и выключает переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn и управляет матричным преобразователем 4 через PWM-управление. Контроллер 10 включает в себя: секцию 11 преобразования координат; секцию 12 модуляции пространственных векторов; секцию 13 вычисления времени вывода нулевых векторов; таблицу 14 шаблонов переключения; и секцию 15 формирования сигналов переключения.
[0022] Секция 11 преобразования координат сравнивает определенные напряжения, определенные посредством датчиков 31, 32, 33 напряжения, выясняет взаимосвязь абсолютных величин между ними, выполняет преобразование из трехфазного в двухфазное для определенных напряжений (Vr, Vs, Vt) в фиксированной системе координат, которые должны быть преобразованы в напряжения (vα, vβ) в статической системе координат, и выводит напряжения (vα, vβ) в секцию 12 модуляции пространственных векторов. Секция 12 модуляции пространственных векторов заменяет формы сигналов трехфазного напряжения на вектор с использованием модуляции пространственных векторов. Таким образом, времена (T1, T2) вывода векторов напряжения вычисляются с использованием фазового угла (θ) напряжений (vα, vβ).
[0023] Секция 13 вычисления времени вывода нулевых векторов вычисляет время (Tz) вывода нулевого вектора с использованием несущего сигнала, такого как треугольная волна, и времени, вычисленного посредством секции 12 модуляции пространственных векторов. Частота несущего сигнала задается выше частоты электрической мощности переменного тока источника 1 питания переменного тока. Таблица 14 шаблонов переключения сохраняет шаблон переключения, предварительно установленный с возможностью выполнять переключение переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn, соответствующих фазовому углу (θ), в форме таблицы.
[0024] Секция 15 формирования сигналов переключения извлекает шаблон переключения, соответствующий фазовому углу (θ), посредством обращения к таблице 14 шаблонов переключения и выводит управляющие сигналы (Drp, Drn, Dsp, Dsn, Dtp, Dtn), чтобы включать или выключать переключающие элементы (Srp, Srn, Ssp, Ssn, Stp, Stn), с использованием извлеченного шаблона переключения, времен (T1, T2) вывода вектора напряжения и времени (Tz) вывода нулевого вектора, в схему возбуждения (не показана), содержащуюся в матричном преобразователе 4. Переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn управляются посредством импульсных сигналов. Таким образом, включение и выключение переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn, включенных в матричный преобразователь 4, переключается таким образом, чтобы включаться и выключаться посредством управления контроллером 10, и электрическая мощность преобразуется.
[0025] Далее описывается управление переключением переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn с использованием фиг.5.
Фиг.5 показывает график, представляющий последовательность переключения для переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn.
На фиг.5, высокий уровень обозначает включенное состояние, а низкий уровень обозначает отключенное состояние. Система (способ) коммутации напряжения используется для переключения переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn. Контроллер 10 отслеживает взаимосвязь абсолютных величин входных напряжений из определенных напряжений (Vr, Vs, Vt), чтобы выполнять коммутацию. Предположим, что осуществляется переход состояния Trrp1, Trrp2, Trsp1, Trsp2 из начального состояния в последовательности i, ii, iii и iv.
[0026] В дальнейшем в этом документе описывается конкретный пример системы (способа) коммутации напряжения.
Для простоты пояснения ниже описывается только управление коммутацией для схемы верхнего плеча матричного преобразователя 4.
Предположим, что транзисторы Trrp1, Trrp2, включенные в переключающий элемент Srp, находятся во включенном состоянии, а транзисторы Trsp1, Trsp2, включенные в переключающий элемент Ssp, находятся в отключенном состоянии. Далее поясняется случай, в котором в состоянии, в котором напряжение переключающего элемента Srp выше напряжения переключающего элемента Ssp, коммутация выполняется из переключающего элемента Srp на напряжение в переключающем элементе Ssp.
[0027] Во-первых, когда осуществляется переход состояния из начального состояния в состояние (i), транзистор Trsp1 включается, когда осуществляется переход состояния из состояния (i) в состояние (ii), транзистор Trrp1 выключается, когда осуществляется переход состояния из состояния (ii) в состояние (iii), транзистор Trsp2 включается, и когда осуществляется переход состояния из состояния (iii) в состояние (iv), транзистор Trrp2 выключается. Это вызывает переключение переключающих элементов, так что источник 1 питания переменного тока не замыкается накоротко. Таким образом, подавляется нарушение коммутации.
[0028] Далее описывается управление в контроллере 10 с использованием фиг.1, 4 и 6-12.
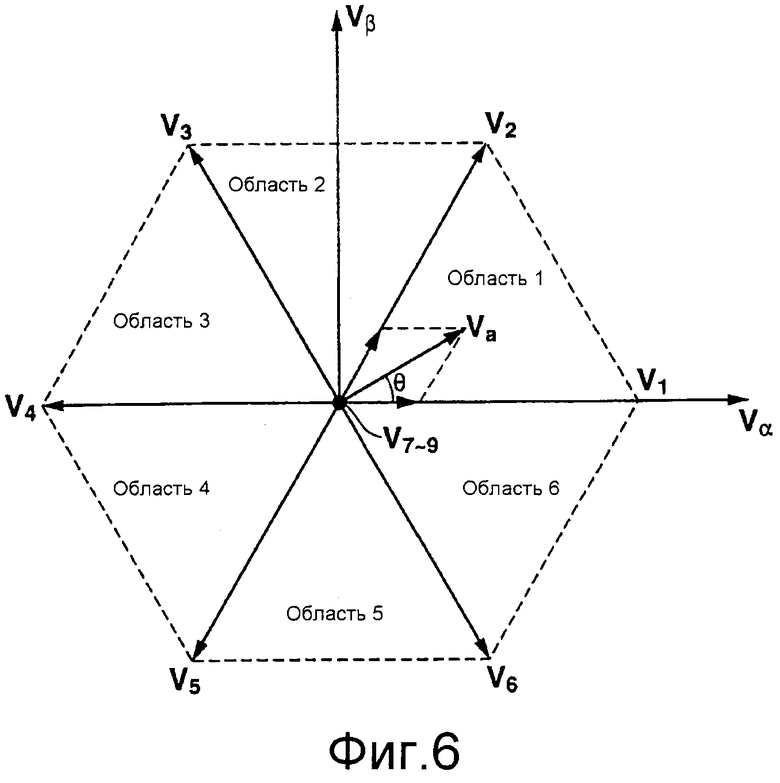
[0029] Когда напряжение (vα, vβ) в статических координатах системы координат, преобразованных и вычисленных посредством секции 11 преобразования координат, вводится в секцию 12 модуляции пространственных векторов, секция 12 модуляции пространственных векторов вычисляет фазовый угол (θ) напряжения (vα, vβ) из введенного напряжения (vα, vβ). Следует отметить, что напряжение (vα, vβ) и фазовый угол (θ) представляются посредством вектора, как показано на фиг.6. Фиг.6 показывает векторную диаграмму, на которой определенные напряжения (Vr, Vs, Vt) преобразуются в двухфазную систему координат αβ, и входные напряжения наблюдаются в качестве векторов напряжения в статической системе координат. Va на фиг.6 представляет базисный вектор и соответствует выходному значению команды управления, имеющему фазовый угол (θ) входного напряжения в системе координат αβ. Базисный вектор вращается с центральной точкой, показанной на фиг.6, в качестве центра в соответствии со взаимосвязью абсолютных величин между входными напряжениями соответствующих фаз.
[0030] В этом варианте осуществления, в статической системе координат, координаты разделяются по 60 градусов на шесть областей от α-оси в направлении против часовой стрелки. Оси V1-V6 выделяются граничным линиям соответствующих областей. Область между V1 и V2 допускается в качестве "области 1", область между V2 и V3 допускается в качестве "области 2", область между V3 и V4 допускается в качестве "области 3", область между V4 и V5 допускается в качестве "области 4", область между V5 и V6 допускается в качестве "области 5" и область между V6 и V1 допускается в качестве "области 6". Помимо этого, V7-V9 выделяются началу координат.
Затем, векторы V1-V9 являются векторами напряжений, выведенных из матричного преобразователя 4. Векторы V1-V6, имеющие абсолютные величины в качестве векторов (ненулевых), представляют то, что ненулевые напряжения выводятся из матричного преобразователя 4. Другими словами, векторы V1-V6 соответствуют ненулевым векторам напряжения (в дальнейшем в этом документе, называемым "векторами напряжения"). С другой стороны, векторы V7-V9 представляют векторы нуля напряжения (нулевого напряжения) (в дальнейшем в этом документе, называемые "нулевыми векторами").
[0031] Помимо этого, в этом варианте осуществления, векторы V1-V9 напряжения задаются согласно взаимно различным шаблонам переключения переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn, и шаблона переключения для того, чтобы управлять переключающими элементами Srp, Srn, Ssp, Ssn, Stp, Stn определяются в зависимости от того, какой области принадлежат входные напряжения. Следует отметить, что ниже описывается взаимосвязь между векторами V1-V9 напряжения и шаблоном переключения.
[0032] Затем, секция 12 модуляции пространственных векторов определяет то, какой области принадлежит входное напряжение в момент времени определения, из фазового угла (θ) базисного вектора va. В примере, показанном на фиг.6, поскольку базисный вектор va находится в области 1, секция 12 модуляции пространственных векторов определяет то, что входное напряжение принадлежит области 1, из фазового угла (θ) напряжения (vα, vβ). Помимо этого, например, в случае если взаимосвязь абсолютных величин входных напряжений (Vr, Vs, Vt) соответствующих фаз изменяется, и фазовый угол (θ) координат напряжений (vα, vβ) по αβ-оси, преобразованных согласно секции 11 преобразования координат, указывает 90 градусов, секция 12 модуляции пространственных векторов идентифицирует область 2, включающую в себя фазовый угол в 90 градусов.
[0033] Секция 12 модуляции пространственных векторов вычисляет время вывода вектора напряжения из компонента по оси области базисного вектора (Va), когда область идентифицируется.
В случае примера, показанного на фиг.6, базисный вектор (Va) принадлежит области 1. Секция 12 модуляции пространственных векторов вычисляет компонент (Va1) вдоль оси V1 и компонента (Va2) вдоль оси V2 с использованием оси V1 и оси V2, которые являются осями области 1. Затем, абсолютная величина (Va1) компонента по оси V1 является временем вывода шаблона переключения, соответствующего V1, и абсолютная величина (Va2) компонента по оси V2 является временем вывода шаблона переключения, соответствующего V2. Здесь следует отметить, что времена вывода векторов V1-V6 напряжения допускаются в качестве T1, T2, а времена вывода нулевых векторов (V7-V9) допускаются в качестве Tz. Как описано ниже, в этом варианте осуществления, два вектора напряжения выводятся в течение полупериода первой половины несущей. Следовательно, время вывода первого вектора напряжения из двух векторов напряжения допускается в качестве T1, и время вывода второго вектора напряжения допускается в качестве T2.
[0034] Каждое время (T1, T2, Tz) вывода представляется посредством нормализованного времени, соответствующего периоду несущей.
Как описано ниже, в этом варианте осуществления, чтобы обеспечивать время (Tz) вывода нулевых векторов (V7-V9) за полупериод несущей, накладывается ограничение на времена (T1, T2, Tz) вывода. Секция 12 модуляции пространственных векторов вычисляет времена (T1, T2) вывода так, что каждое из времен (T1, T2) вывода, в течение которых выводится соответствующий один из двух векторов напряжения, равно или ниже предварительно определенного наименьшего предельного значения. Следует отметить, что предварительно определенное наименьшее предельное значение соответствует времени, в течение которого обеспечивается время (Tz) вывода, и задается равным времени меньше времени, соответствующего полупериоду несущей.
[0035] Область 1 является областью между фазовым углом в 0-60 градусов. Например, в случае если фазовый угол базисного вектора (va) попадает между 0 и 30 градусами, абсолютная величина (Va1) компонента по оси V1 превышает абсолютную величину (Va2) компонента по оси V2. Следовательно, время (T1) вывода шаблона переключения V1 превышает время (T2) вывода шаблона переключения V2. Область 4 является областью между фазовым углом в 180 градусов и фазовым углом в 240 градусов. Например, фазовый угол базисного вектора (va) варьируется от 210 до 240 градусов, абсолютная величина (Va5) компонента по оси V5 превышает абсолютную величину (Va4) компонента по оси V4. Следовательно, время (T2) вывода шаблона переключения V5 превышает время (T1) вывода шаблона переключения V4.
Таким образом, секция 12 модуляции пространственных векторов вычисляет фазовый угол (θ) с использованием vα, vβ, соответствующих определенным напряжениям соответствующих фаз, вычисляет времена (T1, T2) вывода векторов напряжения из базисного вектора Va, имеющего вычисленный фазовый угол (θ) в качестве направленного компонента, и выводит вычисленные времена (T1, T2) вывода в секцию 13 вычисления времени вывода нулевых векторов.
[0036] Секция 13 вычисления времени вывода нулевых векторов вычитает полное время из времени (T1) вывода и времени (T2) вывода из предварительно определенного полупериода периода несущей, чтобы вычислять время нулевого вектора (Tz). Поскольку секция 12 модуляции пространственных векторов вычисляет время (T1) вывода и время (T2) вывода таким образом, что вышеописанное полное время равно или ниже предварительно определенного наименьшего предельного времени, секция 13 вычисления времени вывода нулевых векторов может вычислять время нулевого вектора (Tz). В этом варианте осуществления, чтобы предоставлять переменный ток для выходной электрической мощности матричного преобразователя 4, время, в которое выводится ненулевое напряжение, и время, в которое выводится нулевое напряжение, периодически предоставляются.
Поскольку период несущей соответствует периоду выходного напряжения, время (Tz) вывода нулевого вектора является вычитанием времени (T1) вывода и времени (T2) вывода из времени, соответствующему полупериоду несущей. Секция 13 вычисления времени вывода нулевых векторов выводит время (Tz) нулевого вектора и времена (T1, T2) векторов напряжения в секцию 15 формирования сигналов переключения.
[0037] Секция 15 формирования сигналов переключения формирует сигналы переключения, чтобы возбуждать переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn, с использованием шаблона переключения, сохраненного в таблице 14 шаблонов переключения, времени нулевого вектора (Tz) и времен (T1, T2) векторов напряжения.
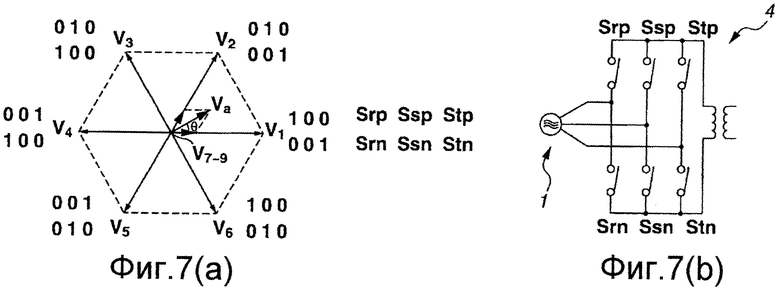
[0038] Перед тем как подробно описывается содержимое управления таблицы 14 шаблонов переключения и секции 15 формирования сигналов переключения, ниже описывается взаимосвязь между векторами (V1-V9) и фазовым углом (θ) и шаблоном переключения с использованием фиг.7(a) и 7(b).
Фиг.7(a) является пояснительным видом векторной диаграммы по фиг.6, в которую добавляется шаблон переключения. Фиг.7(b) показывает упрощенную принципиальную схему источника 1 питания переменного тока и матричного преобразователя 4 из состава зарядной системы на фиг.1. Следует отметить, что "1", показанное на фиг.7(a) обозначает включенное состояние, а "0" обозначает отключенное состояние.
[0039] Как показано на фиг.7(a) и 7(b), векторы (V1-V9) соответствуют шаблона переключения переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn. В векторе (V1) напряжения переключающие элементы Srp, Stn включаются, а другие переключающие элементы Srn, Ssp, Ssn, Stp выключаются. В векторе (V2) напряжения переключающие элементы Ssp, Stn включаются, а другие переключающие элементы Srp, Srn, Ssn, Stp выключаются. В векторе (V3) напряжения, переключающие элементы Srn, Ssp включаются, а другие переключающие элементы Srp, Ssp, Stp, Stn выключаются.
В векторе (V4) напряжения, переключающие элементы Srn, Stp включаются, а другие переключающие элементы Srp, Ssp, Ssn, Stn выключаются. В векторе (V5) напряжения, переключающие элементы Ssn, Stp включаются, а другие переключающие элементы Srp, Srn, Ssp, Stp, Stn выключаются. В векторе (V6) напряжения, переключающие элементы Srp, Ssn включаются, а другие переключающие элементы Srn, Ssp, Stp, Stn выключаются.
Другими словами, в векторах (V1-V6) напряжения, один из переключающих элементов Srp, Ssp, Stp схемы верхнего плеча, содержащихся в одной фазе из соответствующих фаз, включается, а другие переключающие элементы Srp, Ssp, Stp схемы верхнего плеча, включенные в другие фазы, выключаются, по меньшей мере, один из переключающих элементов Srn, Ssn, Stn схемы нижнего плеча, включенный в другие фазы, включается, а другие переключающие элементы Srn, Ssn, Stn схемы нижнего плеча, включенные в одну фазу, выключаются.
[0040] Затем, в случае если переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn управляются через шаблон переключения, соответствующий векторам (V1-V6) напряжения, ненулевое напряжение выводится на выходную сторону матричного преобразователя 4. Помимо этого, поскольку два вектора, которые предоставляют границы двух смежных областей, используются в соответствии с областями, формы сигналов различных уровней напряжения могут выводиться из матричного преобразователя 4.
[0041] Помимо этого, на векторных диаграммах, показанных на фиг.6, 7(a) и 7(b), шаблон переключения выделяется нулевым векторам (V7-V9), показанным в начале координат по фиг.7(a). В векторе (V7) переключающие элементы Srp, Srn включаются, а другие переключающие элементы Ssp, Ssn, Stp, Stn выключаются. В векторе (V8) переключающие элементы Ssp, Ssn включаются, а другие переключающие элементы Srp, Srn, Stp, Stn, выключаются. В векторе (V9) переключающие элементы Stp, Stn включаются, а другие переключающие элементы Srp, Srn, Ssp, Ssn, выключаются.
Другими словами, в нулевых векторах (V7-V9), переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn, включенные в одну фазу из соответствующих фаз, включаются, а переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn, включенные в другие фазы, выключаются.
[0042] В случае если переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn управляются в шаблоне переключения, соответствующем нулевым векторам (V7-V9), вывод матричного преобразователя 4 указывает нуль.
[0043] Как описано выше, одна из областей идентифицируется согласно фазовому углу (θ). Затем, определяются выходные векторы (V1-V6) напряжения и время (T1, T2) вывода. Помимо этого, секция 13 вычисления времени вывода нулевых векторов вычисляет нулевые векторы (V7-V9) и их время (Tz) вывода. Поскольку матричный преобразователь 4 задается с выводом электрической мощности переменного тока в качестве цели, реверсируя и управляя переключающими элементами Srp, Srn, Ssp, Ssn, Stp, Stn во второй половине периода несущей для управления переключением в первой половине периода несущей, так что может быть получена выходная электрическая мощность, имеющая обратную полярность по отношению к первой половине периода несущей.
Затем, в этом варианте осуществления, таблица 14 шаблонов переключения сохраняет шаблон переключения, который задается согласно областям по фиг.6. Помимо этого, секция 15 формирования сигналов переключения вычисляет соответствующие времена вывода векторов (V1-V9) для периода несущей из времен (T1, T2) вывода векторов напряжения и времени (Tz) вывода нулевых векторов и формирует сигналы переключения.
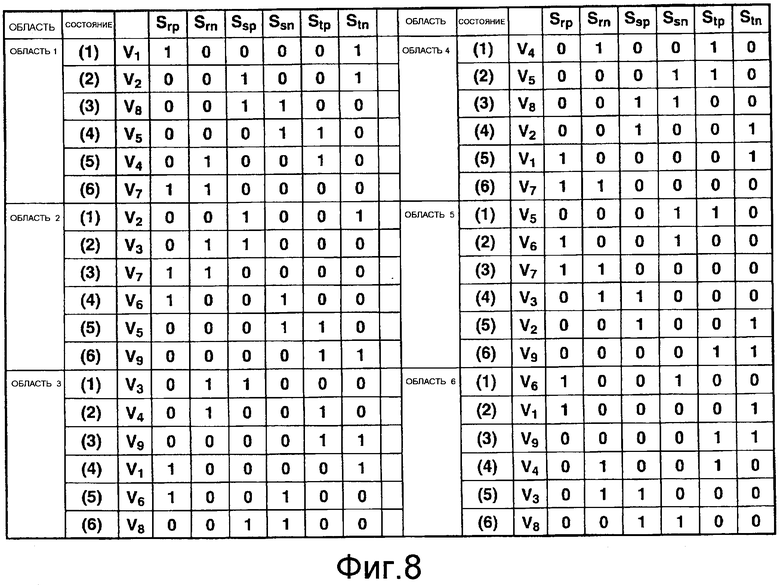
[0044] Далее описывается таблица, сохраненная в таблице 14 шаблонов переключения, с использованием фиг.8. Фиг.8 является концептуальной схемой, представляющей таблицу, сохраненную в таблице 14 шаблонов переключения.
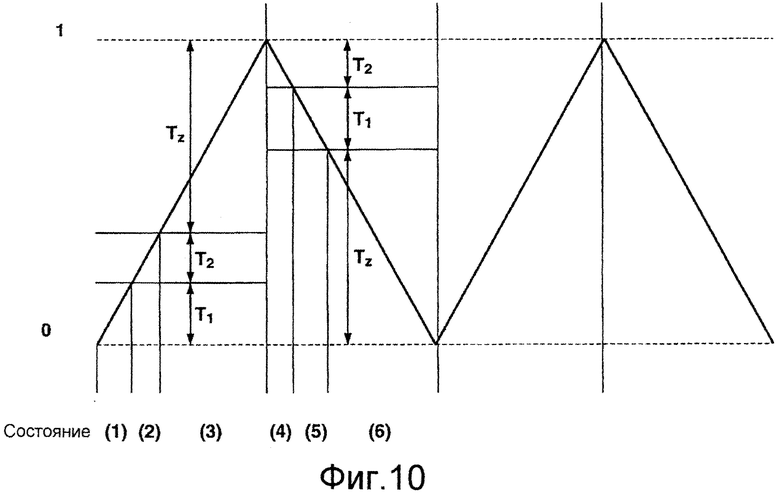
На фиг.8, области 1-6 соответствуют областям 1-6, показанным на фиг.6. V1-V9 соответствуют векторам (V1-V9). На фиг.8, Srp, Srn, Ssp, Ssn, Stp, Stn соответствуют переключающим элементам Srp, Srn, Ssp, Ssn, Stp, Stn. Помимо этого, для состояний (1)-(6) на фиг.8, поскольку один период несущей разделяется на шесть, когда задаются согласно временам (T1, T2, Tz) вывода, состояния (1)-(6) извлекаются во временных рядах из секции точки вершины впадины на кривой несущей.
[0045] Чтобы выводить переменный ток из матричного преобразователя 4, таблица 14 матричных шаблонов задает шаблон переключения таким образом, что два вектора напряжения и один нулевой вектор последовательно выводятся в первом (предыдущем) полупериоде периода несущей, и два вектора напряжения и один нулевой вектор последовательно выводятся во втором (последующем) полупериоде периода несущей.
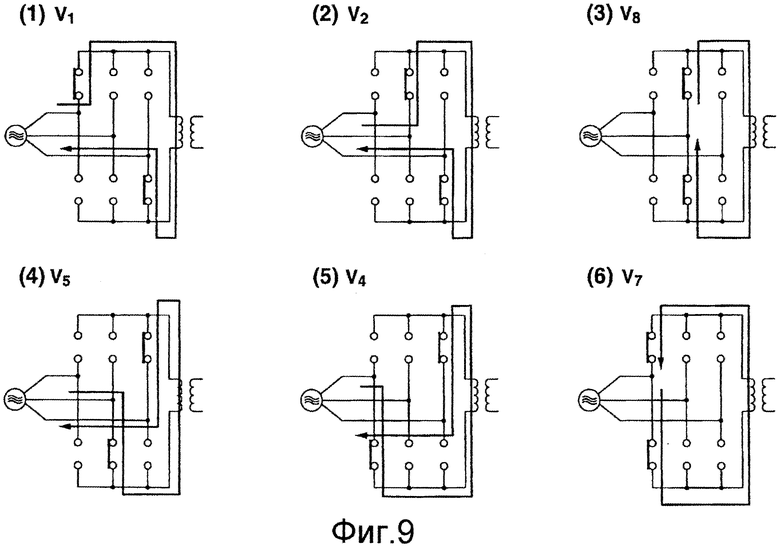
[0046] Например, в случае если базисный вектор (va) принадлежит области 1, переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn управляются в последовательности вектора (V1) напряжения, вектора (V2) напряжения, нулевого вектора (V8), вектора (V5) напряжения, вектора (V4) напряжения и нулевого вектора (V7) в расчете на каждый период несущей. Переход управления переключающими элементами Srp, Srn, Ssp, Ssn, Stp, Stn в области 1 показывается на фиг.9. Фиг.9 показывает принципиальную схему, до которой упрощается принципиальная схема источника 1 питания переменного тока и матричного преобразователя 4.
Включенное или отключенное состояние соответствующих переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn в соответствующих состояниях (1)-(6) и направление, протекающее через первичную сторону трансформатора 51, обозначаются посредством стрелок.
[0047] Как показано на фиг.(1)-(6) по фиг.9, в случае если осуществляется переход из одного состояния в последующее состояние, к примеру, из состояния (1) в состояние (2) из состояния (2) в состояние (3) и т.д., контроллер 10 включает (включает из отключенного состояния) переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn любой одной схемы плеча из схемы верхнего плеча и схемы нижнего плеча и поддерживает включенное состояние переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn другой схемы плеча. Другими словами, из переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn, каждый из которых находится во включенном состоянии, один из переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn выключается, но состояние другого из переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn поддерживается (фиксируется).
[0048] Помимо этого, в случае если переход каждого состояния осуществляется непрерывно, к примеру, состояния (1), (2) и (3), состояния (3), (4) и (5) и т.п., переключающие элементы Srp, Ssp, Stp схемы верхнего плеча или переключающие элементы Srn, Ssn, Stn схемы нижнего плеча не переключаются непрерывно. Другими словами, переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn попеременно переключаются между схемой верхнего плеча и схемой нижнего плеча.
[0049] Таким образом, в этом варианте осуществления уменьшается число раз, когда выполняется переключение переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn, когда осуществляется переход состояния между соответствующими состояниями (1)-(6), чтобы подавлять нарушение коммутации. Следует отметить, что пояснен шаблон переключения области 1, но для областей из областей 2-6 выполняется идентичное управление переключением при идентичных состояниях согласно шаблону, уменьшающему число раз, когда выполняется переключение.
[0050] Следует отметить, что, как показано в (1)-(6) по фиг.9, в состояниях (1)-(3) выходной ток матричного преобразователя 4 указывает плюс, а в состояниях (4)-(6) выходной ток матричного преобразователя 4 указывает минус. Таким образом, вывод матричного преобразователя 4 указывает переменный ток посредством элементов управления переключением Srp, Srn, Ssp, Ssn, Stp, Stn в шаблоне переключения области 1 таблицы 14 шаблонов переключения. Также следует отметить, что для области 2, области 3, области 4, области 5 и области 6, управление переключением в шаблоне, показанном на фиг.8, аналогично выполняется для того, чтобы предоставлять переменный ток для вывода матричного преобразователя 4.
[0051] Затем, поскольку области 1-6 классифицируются в соответствии с фазовым углом, таблица 14 шаблонов переключения сохраняет шаблон переключения, соответствующий фазовому углу (θ).
[0052] Далее описывается управление секцией 15 формирования сигналов переключения с использованием фиг.10.
Фиг.10 является графиком для пояснения взаимосвязи между несущей и временами (T1, T2, Tz) вывода.
Во-первых, секция 15 формирования сигналов переключения задает значения команд управления, соответствующие временам (T1, T2) вывода, с учетом синхронизации с периодом несущей.
Поскольку контроллер 10 выполняет управление переключением через метод PWM-управления, продолжительности времен (T1, T2, Tz) вывода векторов напряжения и нулевого вектора указывают значение команды управления (значение напряжения).
Когда значения команд управления задаются для времен (T1, T2, Tz) вывода, значения команд управления нормализуются таким образом, что максимальная амплитуда несущей становится временами (T1, T2, Tz) вывода, в течение которых выводятся два вектора напряжения и один нулевой вектор. Помимо этого, для распределения времен вывода векторов напряжения и нулевого вектора, в первый полупериод периода несущей значения команд управления задаются таким образом, что векторы напряжения на стороне в большей степени по часовой стрелке первоначально выводится в соответствующих областях 1-6 из векторов (V1-V6) напряжения, показанных на фиг.6. После того, как два выводятся вектора напряжения, значения команд управления задаются таким образом, что выводятся нулевые векторы (V7-V9).
С другой стороны, значения команд управления задаются таким образом, что во второй полупериод несущей, времена вывода двух векторов (V1-V6) реверсируются относительно времен вывода в первый полупериод периода несущей и выводятся, а после этого выводятся нулевые векторы (V7-V9).
[0053] В качестве конкретного примера, в случае если фазовый угол (θ) попадает в диапазон 0-30 градусов (область 1), как показано на фиг.10, секция 15 формирования сигналов переключения задает значение (T1) команды управления на уровне, соответствующем времени (T1) вывода относительно низкого уровня несущей, и задает значение (T2) команды управления посредством суммирования уровня, соответствующего времени (T2) вывода, со значением (T1) команды управления в качестве опорного уровня в первый полупериод несущей. С другой стороны, во второй полупериод несущей, секция 15 формирования сигналов переключения задает значение (T2) команды управления на уровне, соответствующем времени (T2) вывода, пониженном с высокого уровня несущей, и задает значение (T1) команды управления на уровне, соответствующем времени (T1) вывода со значением (T2) команды управления, в качестве опорного уровня.
[0054] Секция 15 формирования сигналов переключения сравнивает несущую с заданными значениями команд управления, чтобы определять распределение времен вывода векторов напряжения и нулевого вектора.
Помимо этого, как описано выше, значения команд управления задаются относительно времен (T1, T2, Tz) вывода и сравниваются с несущей, так что отделяются шесть состояний в расчете на каждый период несущей. Тем не менее, шесть состояний соответствуют состояниям (1)-(6), показанным на фиг.8. Другими словами, секция 15 формирования сигналов переключения сравнивает времена (T1, T2, Tz) вывода с несущей, чтобы определять распределение времен вывода шаблона переключения, сохраненного в таблице 14 несущих для переключения.
[0055] Секция 15 формирования сигналов переключения сравнивает несущую с временами (T1, T2, Tz) вывода, чтобы определять распределение времен вывода, как показано на фиг.10. В это время, секция 15 формирования сигналов переключения извлекает шаблон переключения в соответствии с фазовым углом (θ) из таблицы 14 шаблонов переключения, формирует сигналы переключения для переключающих элементов Srp, Srn, Ssp, Ssn, Stp, Stn, которые должны возбуждаться, в соответствии с извлеченным шаблоном, согласно распределению времен вывода, и выводит сигналы переключения в переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn.
[0056] В частности, в случае если фазовый угол (θ) попадает в диапазон 0-30 градусов, используется шаблон переключения области 1 на фиг.8. В течение времени (T1) вывода с точкой вершины впадины на кривой несущей в качестве начальной точки выполняется управление переключением, выводящее вектор (V1) напряжения. В течение последующего времени (T2) вывода выполняется управление переключением, чтобы выводить вектор (V2) напряжения. В течение дополнительного последующего времени (Tz) вывода выполняется управление переключением, чтобы выводить нулевой вектор (V8). Затем, за второй полупериод несущей, в течение времени (T2) вывода с пиковой вершиной несущей в качестве начальной точки, выполняется управление переключением, чтобы выводить несущую (V5) напряжения. В течение последующего времени (T1) вывода выполняется управление переключением, чтобы выводить вектор (V4) напряжения. В течение дополнительного времени (Tz) вывода выполняется управление переключением, чтобы выводить нулевой вектор (V7).
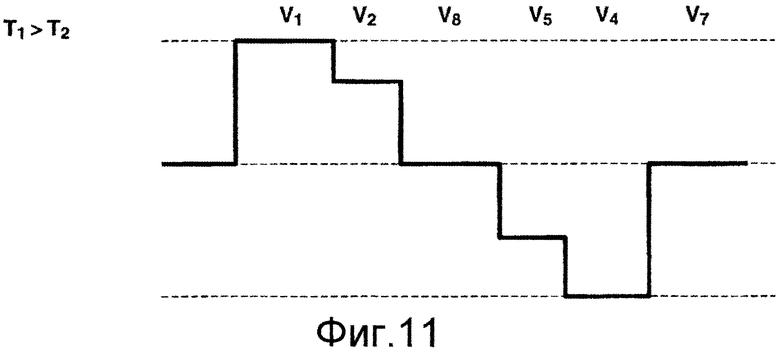
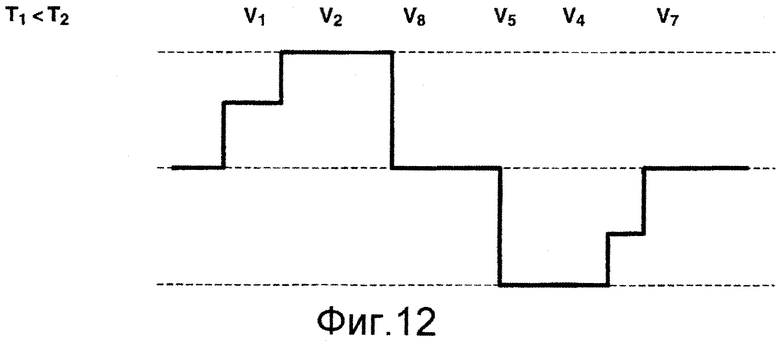
[0057] Форма сигнала выходного напряжения матричного преобразователя 4 описывается с использованием фиг.11 и 12.
Фиг.11 показывает временную характеристику формы сигнала выходного напряжения матричного преобразователя 4 в случае, если время (T1) вывода превышает время (T2) вывода.
Фиг.12 показывает другую временную характеристику формы сигнала выходного напряжения матричного преобразователя 4 в случае, если время (T2) вывода превышает время (T1) вывода.
В случае если фазовый угол (θ) попадает в диапазон 0-30 градусов, время (T1) вывода становится более длительным, чем время (T2) вывода. Таким образом, форма сигнала напряжения, выведенная из матричного преобразователя 4, изменяется, как показано на фиг.12. Помимо этого, в случае если фазовый угол (θ) находится в диапазоне 30-60 градусов, время (T2) вывода становится более длительным, чем время (T1) вывода, и форма сигнала выходного напряжения, выведенная из матричного преобразователя 4, изменяется, как показано на фиг.12.
[0058] Как описано выше, в этом варианте осуществления, переключающие элементы Srp, Srn, Ssp, Ssn, Stp, Stn управляются с использованием времен (T1, T2) вывода, выводящих векторы напряжения, и времени (Tz) вывода, выводящего нулевой вектор, чтобы задавать время (Tz) вывода, включенное в первый полупериод несущей, равным времени (Tz) вывода, включенному во второй полупериод несущей. Как описано выше, поскольку предоставляется время (Tz) вывода нулевого вектора, обеспечивается интервал между операцией переключения в начальный момент времени для времени (Tz) вывода нулевого вектора и операцией переключения в последнее время времени (Tz) вывода, так что перекрытие между операциями переключения в начальное время и в последнее время не допускается, и может предотвращаться нарушение коммутации.
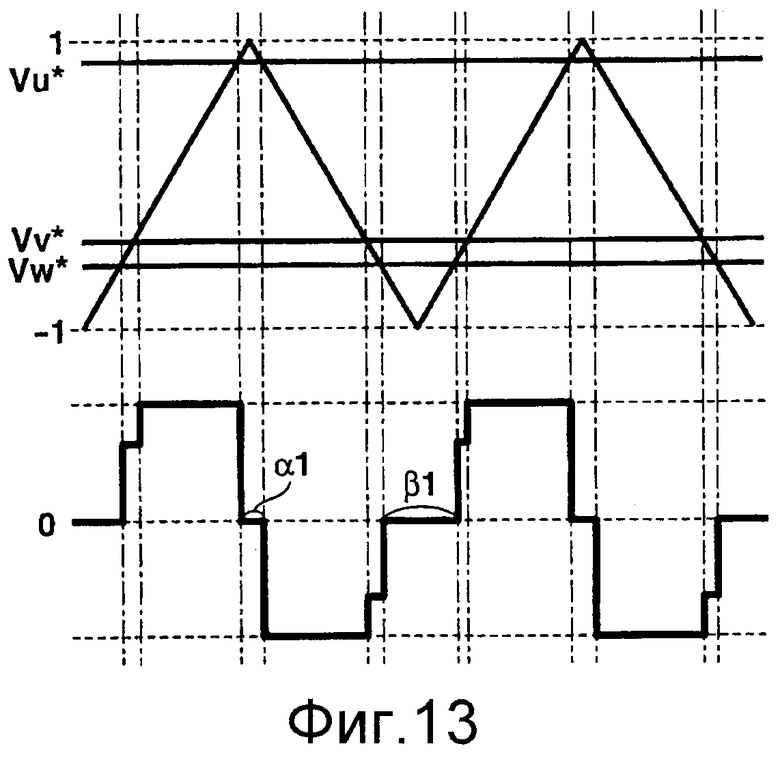
[0059] В этой связи, в качестве отличия от этого варианта осуществления, известно устройство инвертора (сравнительный пример 3), в котором в схеме трехфазного инвертора, сформированной посредством мостовой схемы, имеющей множество переключающих элементов, с определенными напряжениями из промежуточных напряжений соответствующих фаз, заданными в качестве значений команд управления (vu*, vv*, vw*), определенные напряжения сравниваются с несущей треугольной волны, чтобы управлять переключающими элементами.
Фиг.13 показывает формы сигналов несущей и значений команд управления (vu*, vv*, vw*) и форму сигнала выходного напряжения схемы инвертора.
Как показано на фиг.13, сравнительный пример 3 использует теоретическое уравнение, которое управляет уровнем выходного напряжения, когда несущая превышает значение команды управления, и управляет таким образом, чтобы реверсировать теоретическое уравнение с пиком и впадиной на кривой несущей в качестве границ. Другими словами, в сравнительном примере 3, уровень выходного напряжения задается посредством сравнения определенных напряжений и несущей, и выполняется управление выводом переменного тока. Следовательно, интервалы нулевого напряжения (соответствуют α1, β1 на фиг.13) отклоняются относительно периода несущей.
Затем, поскольку один из интервалов нулевого напряжения (α1 на фиг.13), становится относительно коротким, интервал операций переключения становится, соответственно, коротким в первый момент времени интервала нулевого напряжения и в последний момент времени интервала нулевого напряжения. Следовательно, возникает нарушение коммутации.
Помимо этого, в этом сравнительном примере 3, интервал нулевого напряжения не предписывается в качестве предварительно определенного интервала относительно периода несущей. Таким образом, возникает такая проблема, что управление временем, в течение которого выводится нулевое напряжение, становится сложным.
[0060] Поскольку в этом варианте осуществления обеспечивается время (Tz) вывода нулевого вектора относительно периода несущей, предотвращается сокращение интервала операций переключения в начальный момент времени интервала нулевого напряжения и последнего момента времени интервала нулевого напряжения, и может предотвращаться нарушение коммутации.
Другими словами, как показано на фиг.14, интервал вывода нулевого вектора в равной степени выделяется каждому полупериоду несущей. Следовательно, время (Tz) вывода нулевого вектора не сокращается чрезмерно, так что можно предотвращать возникновение нарушения коммутации.
Помимо этого, число раз, когда выдается короткий импульс при управлении переключающими элементами Srp, Srn, Ssp, Ssn, Stp, Stn, может быть уменьшено, так что могут предотвращаться такие недостатки, что нагрузка концентрируется на переключающих элементах и прикладывается к переключающим элементом. Кроме того, в этом варианте осуществления, режимы работы сигналов переключения при выполнении PWM-управления и шаблона переключения могут свободно задаваться. Следует отметить, что фиг.14 показывает график для пояснения взаимосвязи между несущей и временами (T1, T2, Tz) вывода и показывает временную характеристику выходного напряжения матричного преобразователя 4.
[0061] Помимо этого, в этом варианте осуществления, в случае если непрерывный переход осуществляется между временами (T1, T2) вывода и временем (Tz) вывода, переключающие элементы (Srp, Ssp, Stp) схемы верхнего плеча или переключающие элементы (Srn, Ssn, Stn) схемы нижнего плеча не переключаются непрерывно. Таким образом, в случае если непрерывный переход между состоянием, в котором выводится вектор напряжения, и состоянием, в котором выводится нулевой вектор, может быть уменьшено число раз, когда выполняется переключение. Следовательно, может предотвращаться возникновение нарушения коммутации.
[0062] Помимо этого, в этом варианте осуществления, времена (T1, T2, Tz) вывода вычисляются из преобразованных напряжений посредством секции 11 преобразования координат, выполняется обращение к таблице 14 шаблонов переключения, и переключающие элементы (Srp, Srn, Ssp, Ssn, Stp, Stn) управляются через шаблон переключения, соответствующий преобразованной фазе напряжения. Таким образом, поскольку обеспечивается время (Tz) вывода нулевого вектора, может предотвращаться нарушение коммутации.
[0063] Помимо этого, в этом варианте осуществления, переключающие элементы управляются через время (T1) вывода, в течение которого один переключающий элемент из переключающих элементов, включенных в схему верхнего плеча, включается, и один переключающий элемент из переключающих элементов, включенных в схему нижнего плеча, включается, и время (T2) вывода, в течение которого другой элемент из переключающих элементов, включенных в схему верхнего плеча, включается, и другой переключающий элемент из переключающих элементов, включенных в схему нижнего плеча, включается. Таким образом, поскольку обеспечивается время вывода нулевого вектора, может не допускаться перекрытие операций переключения между первым моментом времени для времени вывода нулевого вектора и его последним моментом времени. Следовательно, может предотвращаться нарушение коммутации.
[0064] Помимо этого, в этом варианте осуществления, время (T1) вывода является временем перед временем (T2) вывода в первый (начальный) полупериод несущей, и время (T1) вывода является временем после времени (T2) вывода в последний полупериод несущей. Это позволяет достигать выравнивания времени вывода нулевого вектора согласно положительной стороне и отрицательной стороне выходного напряжения матричного преобразователя 4.
[0065] Следует отметить, что, в этом варианте осуществления, с вершиной (точкой) впадины на кривой несущей в качестве начальной точки, сначала компонуются времена (T1, T2) вывода двух векторов напряжения, а затем компонуется время (Tz) вывода нулевого вектора. Тем не менее, не всегда обязательно компоновать времена вывода в этой последовательности.
Например, как показано на фиг.15, в течение полупериода несущей может компоноваться время (Tz/2) в половину времени (Tz) вывода нулевого вектора, затем могут компоноваться времена (T1, T2) вывода двух векторов напряжения, и в завершение, может компоноваться время (Tz/2) в половину оставшегося времени (Tz) вывода.
Помимо этого, в этом варианте осуществления, времена (T1, T2) вывода и время (Tz) вывода выделяются таким образом, что они соответствуют полупериоду несущей. Тем не менее, не всегда обязательно соответствовать полупериоду несущей.
Эти времена вывода могут иметь такое соответствие, что они меньше полупериода несущей или, альтернативно, превышают полупериод несущей.
Помимо этого, предварительно определенное меньшее предельное время в секции 12 модуляции пространственных векторов не всегда является временем меньше полупериода несущей, и может быть временем меньше времени, частично соответствующего периоду несущей.
[0066] Помимо этого, в этом варианте осуществления, времена (T1, T2) вывода управляются таким образом, чтобы выводить два вектора (V1-V6) напряжения за полупериод несущей. Векторы напряжения не всегда являются двумя векторами (V1-V6) напряжения, а могут быть одним вектором (V1-V6) напряжения или, альтернативно, тремя векторами (V1-V6) напряжения. Помимо этого, шаблон переключения, показанный на фиг.8, представляет собой просто один пример. Другой шаблон векторов напряжения и нулевых векторов может применяться вместо этого, и может быть использован другой шаблон переключения, чтобы выводить векторы напряжения и нулевые векторы.
[0067] Вышеописанный матричный преобразователь 4 соответствует схеме преобразования, согласно настоящему изобретению, датчики 31-33 напряжения соответствуют средству определения напряжения, контроллер 10 соответствует средству управления, секция 12 модуляции пространственных векторов и секция 13 вычисления времени вывода нулевых векторов соответствуют секции вычисления времени переключения, секция 15 формирования сигналов переключения соответствует секции формирования управляющих сигналов, времена (T1, T2) вывода соответствуют первому времени переключения, время (Tz) вывода соответствуют второму времени переключения, таблица 14 шаблонов переключения соответствует таблице, и секция 11 преобразования координат соответствует средству преобразования координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2012 |
|
RU2570804C2 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2012 |
|
RU2558749C1 |
| КОНТРОЛЛЕР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2431916C1 |
| ЖИДКОКРИСТАЛЛИЧЕСКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ ЕГО ВОЗБУЖДЕНИЯ | 2010 |
|
RU2496153C1 |
| МАТРИЧНАЯ ПОДЛОЖКА И СПОСОБ ЕЕ ВОЗБУЖДЕНИЯ, ПАНЕЛЬ ОТОБРАЖЕНИЯ И УСТРОЙСТВО ОТОБРАЖЕНИЯ | 2015 |
|
RU2676020C1 |
| СПОСОБ УПРАВЛЕНИЯ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ФУНКЦИЕЙ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ | 2016 |
|
RU2705480C1 |
| ДИСПЛЕЙНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2486607C2 |
| УСТРОЙСТВО МОНИТОРИНГА НАПРЯЖЕНИЯ АККУМУЛЯТОРА | 2010 |
|
RU2484491C1 |
| КОСМЕТОЛОГИЧЕСКОЕ УСТРОЙСТВО | 2021 |
|
RU2824716C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТЬЮ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ МОЩНОСТЬЮ | 2015 |
|
RU2664591C1 |
Изобретение относится к области электротехники и может быть использовано для преобразования электрической мощности. Технический результат - предотвращение нарушения коммутации. Устройство преобразования электрической мощности содержит схему преобразования с несколькими парами двунаправленных переключающих элементов в соответствующих фазах. Вычисляется первое время переключения, в течение которого один из переключающих элементов схемы верхнего плеча одной фазы включен, другие переключающие элементы схемы верхнего плеча в других фазах выключены. По меньшей мере один переключающий элемент схемы нижнего плеча в других фазах включен, а другие переключающие элементы схемы нижнего плеча в одной фазе выключены с использованием напряжений, определенных посредством средства определения напряжения, и выходного значения команды управления. Вычисляется второе время переключения, в течение которого несколько пар переключающих элементов одной фазы включены, а несколько пар переключающих элементов в других фазах выключены. При переходе от первого времени переключения ко второму времени переключения переключающих элементов, каждый из которых находится во включенном состоянии, один из переключающих элементов одной из схемы верхнего плеча или схемы нижнего плеча выключают, и другой из переключающих элементов другой схемы плеча поддерживается во включенном состоянии. 2 з.п. ф-лы, 15 ил.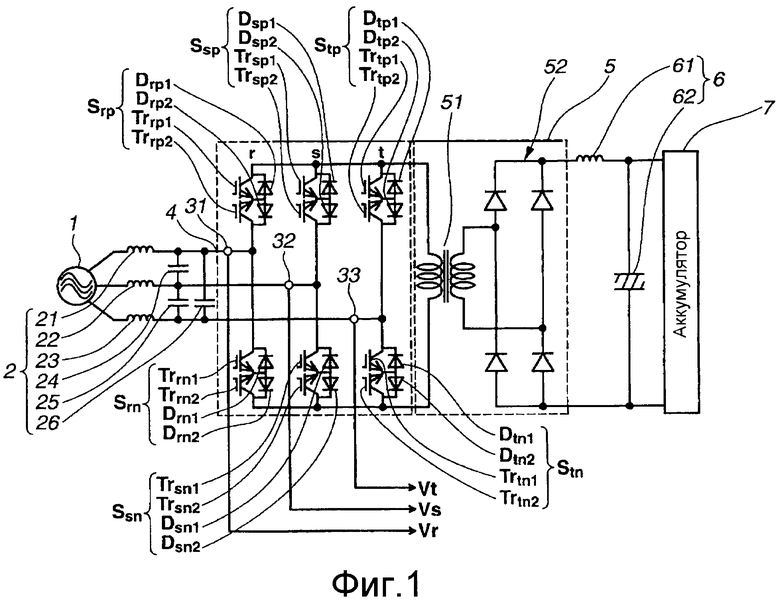
1. Устройство преобразования электрической мощности, содержащее:
схему преобразования, имеющую несколько пар из двунаправленно переключаемых переключающих элементов, подключенных к соответствующим фазам, причем схема преобразования выполнена с возможностью преобразовывать подведенную электрическую мощность переменного тока в электрическую мощность переменного тока;
средство определения напряжения для определения входных напряжений в схему преобразования; и
средство управления для включения и выключения переключающих элементов, для управления схемой преобразования,
при этом средство управления содержит:
- секцию вычисления времени переключения, выполненную с возможностью вычислять первое время переключения, в течение которого один из переключающих элементов схемы верхнего плеча из нескольких пар из переключающих элементов, содержащихся в одной фазе из соответствующих фаз, включен, другие переключающие элементы схемы верхнего плеча из нескольких пар из переключающих элементов, содержащихся в других фазах, выключены, по меньшей мере, один переключающий элемент схемы нижнего плеча из нескольких пар переключающих элементов, содержащихся в других фазах, включен, а другие переключающие элементы схемы нижнего плеча из нескольких пар переключающих элементов, содержащихся в одной фазе, выключены, с использованием определенных напряжений, определенных посредством средства определения напряжения, и
выходного значения команды управления, и вычислять второе время переключения, в течение которого несколько пар переключающих элементов, содержащихся в одной фазе из соответствующих фаз, включены, а несколько пар из переключающих элементов, содержащихся в других фазах из соответствующих фаз, выключены, с использованием несущей и первого времени переключения; и
- секцию формирования управляющих сигналов, выполненную с возможностью формировать управляющие сигналы, чтобы включать и выключать переключающие элементы с использованием первого времени переключения и второго времени переключения, при этом средство управления выключает один из переключающих элементов во включенном состоянии одной из схемы верхнего плеча или схемы нижнего плеча и поддерживает включенное состояние другого из переключающих элементов во включенном состоянии другой схемы плеча, в случае если осуществляется переход состояния от первого времени переключения ко второму времени переключения.
2. Устройство преобразования электрической мощности по п. 1, в котором средство управления не переключает непрерывно переключающие элементы схемы верхнего плеча или переключающие элементы схемы нижнего плеча в случае, если осуществляется переход состояния от первого времени переключения ко второму времени переключения и осуществляется переход состояния от второго времени переключения к первому времени переключения.
3. Устройство преобразования электрической мощности по п. 1 или 2, в котором средство управления дополнительно содержит: секцию преобразования координат, выполненную с возможностью осуществлять преобразование вращающихся координат для определенных напряжений, определенных посредством средства определения напряжения; и таблицу, представляющую взаимосвязь между фазовым углом и шаблоном переключения переключающих элементов, секция вычисления времени переключения вычисляет первое время переключения на основе фазы, полученной из напряжений вращающейся системы координат, преобразованной посредством секции преобразования координат, и секция формирования управляющих сигналов формирует управляющие сигналы, чтобы включать и выключать переключающие элементы по шаблону переключения, который задан согласно фазовому углу напряжений вращающейся системы координат.
| УСТРОЙСТВО ФОРМИРОВАНИЯ И РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ МАТРИЧНОГО НЕПОСРЕДСТВЕННОГО ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ С ВЫСОКОЧАСТОТНОЙ СИНУСОИДАЛЬНОЙ ШИМ | 2010 |
|
RU2422975C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ОБРАТИМЫМ ПРЕОБРАЗОВАТЕЛЕМ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА В ЭНЕРГИЮ ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2265947C2 |
| JP 2006020384 A, 19.01.2006 | |||
| JP 2010263702 A, 18.11.2010 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US 5854743 A1, 29.12.1998 | |||

