Изобретение относится к системам радиосвязи, в частности к устройству и связанному с ним способу для системы радиосвязи, предназначенным для различения идентификатора, принятого от ближайшего передатчика, от идентификатора, принятого от других более удаленных передатчиков.
Системы радиосвязи, способные передавать и отображать информацию, идентифицирующую канал, для подтверждения правильности работы портативного радиоприемника в системе в ожидаемом местоположении, хорошо известны. Одна из таких систем описана в патенте США 4981638 (Davis) на "Пейджер расширенной зоны обслуживания с отсчетом местоположения".
В системе, которая обслуживает большую территорию с помощью множества передатчиков, информация о местоположении, принимаемая портативным радиоприемником, предпочтительно является информацией о местоположении, переданной тем одним из множества передатчиков, который находится ближе всего к данному портативному радиоприемнику. К сожалению, изменяющееся во времени затенение и многолучевое распространение, присутствующие в системе радиосвязи, могут приводить к ситуации, при которой ближайший передатчик иногда не доминирует над более удаленными передатчиками, если портативный радиоприемник перемещается в системе. В результате, информация о местоположении, принятая портативным радиоприемником, иногда может быть неточной.
Такая кратковременно неправильная информация о местоположении может приводить к неудовлетворительной работе портативного радиоприемника, если он находится у границы между участками, на которых портативный радиоприемник должен функционировать по разному. Например, если абонент находится возле границы временного пояса и информация о местоположении используется для автоматической перенастройки часов в приемнике для отображения времени дня в том временном поясе, в котором находится данный приемник, часы могут иногда показывать неправильное время.
Поэтому необходимы способ и устройство для различения информации местоположения, которая передается от ближайшего передатчика, от информации, передаваемой более удаленными передатчиками в системе, даже в присутствии упомянутых выше эффектов затенения временем другого часового пояса и многолучевого распространения.
Одним аспектом изобретения является система радиосвязи, содержащая множество передатчиков для передачи информации, включающей идентификаторы местоположения, каждый из которых имеет некоторое значение местоположения. Идентификаторы местоположения передают многократно в периодических передачах. Эта система радиосвязи также содержит контроллер, связанный с множеством радиопередатчиков для управления ими, и портативный радиоприемник, связанный с множеством передатчиков для приема идентификаторов местоположения. Идентификаторы местоположения включают в себя идентификатор ближайшего местоположения, передаваемый ближайшим передатчиком из множества передатчиков, и идентификаторы удаленного местоположения, передаваемые более удаленными передатчиками из указанного множества передатчиков.
Портативный радиоприемник различает идентификатор ближайшего местоположения от идентификаторов удаленного местоположения. Портативный радиоприемник содержит приемный элемент для приема в течение установленного интервала времени множества периодических передач, содержащих идентификаторы местоположения. Идентификаторы местоположения принимают многократно в течение этого установленного интервала времени. Портативный радиоприемник также содержит запоминающее устройство, подключенное к приемному элементу для сохранения данных, полученных из множества периодических передач и содержащих идентификаторы местоположения. Портативный радиоприемник также содержит процессор, подключенный к запоминающему устройству для сравнения сохраненных частей данных друг с другом, чтобы определить наиболее достоверное значение местоположения. Наиболее достоверным значением местоположения является значение местоположения, соответствующее одной из периодических передач, которая имеет максимальную среднюю надежность приема в установленном интервале времени. Процессор определяет наиболее достоверное значение местоположения как значение местоположения идентификатора ближайшего местоположения.
Следующий аспект изобретения - портативный радиоприемник для приема информации, содержащей идентификаторы местоположения, каждый из которых имеет некоторое значение местоположения. Идентификаторы местоположения включают в себя идентификатор ближайшего местоположения, передаваемый ближайшим передатчиком, и идентификаторы удаленного местоположения, передаваемые более удаленными передатчиками в системе радиосвязи, содержащей данный портативный радиоприемник и множество передатчиков. Портативный радиоприемник различает идентификатор ближайшего местоположения от идентификаторов удаленного местоположения.
Идентификаторы местоположения передают многократно в периодических передачах. Портативный радиоприемник содержит приемный элемент для приема в течение заданного интервала времени множества периодических передач, содержащих идентификаторы местоположения. Идентификаторы местоположения принимают многократно в течение установленного интервала времени. Портативный радиоприемник также содержит запоминающее устройство, подключенное к приемному элементу, для сохранения данных, полученных из множества периодических передач, причем эти данные содержат идентификаторы местоположения.
Портативный радиоприемник также содержит процессор, подключенный к запоминающему устройству для сравнения сохраненных частей данных друг с другом, чтобы определить наиболее достоверное значение местоположения. Наиболее достоверным значением местоположения является значение местоположения, соответствующее одной из периодических передач, которая имеет максимальную среднюю надежность приема в заданном интервале времени. Процессор определяет наиболее достоверное значение местоположения как значение местоположения идентификатора ближайшего местоположения.
Еще один аспект изобретения - вероятностный способ для системы радиосвязи, содержащей множество передатчиков и портативный радиоприемник. Способ предназначен для передачи и приема информации, содержащей идентификаторы местоположения, каждый из которых имеет некоторое значение местоположения. Идентификаторы местоположения включают в себя идентификатор ближайшего местоположения, передаваемый на данный портативный радиоприемник ближайшим передатчиком, и идентификаторы удаленного местоположения, передаваемые на данный портативный радиоприемник более удаленными передатчиками. Способ также предназначен для различения идентификатора ближайшего местоположения от идентификаторов удаленного местоположения. Идентификаторы местоположения передают многократно в периодических передачах. Способ включает выполнение портативным связным приемником этапа приема в течение установленного интервала времени множества периодических передач, содержащих идентификаторы местоположения, которые принимают многократно в течение установленного интервала времени. Способ также включает выполнение портативным связным приемником этапа сохранения данных, полученных из множества периодических передач, причем эти данные содержат идентификаторы местоположения. Способ также включает выполнение портативным связным приемником этапа сравнения сохраненных частей данных друг с другом, чтобы определить наиболее достоверное значение местоположения. Наиболее достоверным значением местоположения является значение местоположения, соответствующее одной из периодических передач, которая имеет максимальную среднюю надежность приема в заданном интервале времени. Кроме того, способ включает выполнение портативным связным приемником этапа определения наиболее достоверного значения местоположения как значения местоположения, соответствующее идентификатору ближайшего местоположения.
На фиг. 1 представлена электрическая структурная схема системы радиосвязи, выполненная согласно предпочтительному варианту и первому, и второму альтернативным вариантам осуществления изобретения; на фиг. 2 - временная диаграмма сигналов, используемая в системе радиосвязи согласно предпочтительному и первому альтернативному вариантам осуществления изобретения; на фиг. 3 - типичная комбинация разрядов для идентификатора местоположения, передаваемого системой радиосвязи согласно предпочтительному, и первому, и второму альтернативным вариантам осуществления изобретения; на фиг. 4 - типичная комбинация символов для идентификатора местоположения, передаваемого системой радиосвязи согласно предпочтительному, и первому, и второму альтернативным вариантам осуществления изобретения; на фиг. 5 - электрическая структурная схема портативного радиоприемника согласно предпочтительному, и первому, и второму альтернативным вариантам осуществления изобретения; на фиг. 6 - структурная схема программно-аппаратного обеспечения, отображающая элементы аппаратно-программного обеспечения, используемые процессором в портативном радиоприемнике согласно предпочтительному варианту осуществления изобретения; на фиг. 7 - блок-схема алгоритма работы портативного радиоприемника согласно предпочтительному, и первому, и второму альтернативным вариантам осуществления изобретения; на фиг. 8 - блок-схема алгоритма подпрограммы запоминания согласно предпочтительному и первому альтернативным вариантам осуществления изобретения; на фиг. 9 - блок-схема алгоритма подпрограммы сравнения согласно предпочтительному варианту осуществления изобретения; на фиг. 10 - электрическая структурная схема первого альтернативного приемного элемента согласно первому альтернативному варианту осуществления изобретения; на фиг. 11 - первая альтернативная схема программно-аппаратного обеспечения, отображающая элементы аппаратно-программного обеспечения, используемые процессором в портативном радиоприемнике согласно первому альтернативному варианту осуществления изобретения; на фиг. 12 - первая альтернативная схема использования запоминающего устройства в портативном радиоприемнике согласно первому альтернативному варианту осуществления изобретения; на фиг. 13 - блок-схема алгоритма первой альтернативной подпрограммы сравнения согласно первому альтернативному варианту осуществления изобретения; на фиг. 14 - альтернативная временная диаграмма сигнала, используемая в системе радиосвязи согласно второму альтернативному варианту осуществления изобретения; на фиг. 15 - электрическая структурная схема второго альтернативного приемного элемента согласно второму альтернативному варианту осуществления изобретения; на фиг. 16 - вторая альтернативная схема использования запоминающего устройства в портативном радиоприемнике согласно второму альтернативному варианту осуществления изобретения; на фиг. 17 - вторая альтернативная схема программно-аппаратного обеспечения, отображающая элементы аппаратно-программного обеспечения, используемые процессором в портативном радиоприемнике согласно второму альтернативному варианту осуществления изобретения; на фиг. 18 - блок-схема алгоритма альтернативной подпрограммы запоминания согласно второму альтернативному варианту изобретения; на фиг. 19 - блок-схема алгоритма второй альтернативной подпрограммы запоминания согласно второму альтернативному варианту осуществления изобретения.
На фиг. 1 изображена электрическая структурная схема системы радиосвязи, выполненной согласно предпочтительному, и первому, и второму альтернативным вариантам изобретения, содержащая контроллер 102, связанный через линии связи 103 с передатчиками 104 для управления последними. Передатчики расположены в пределах первого местоположения 106 и второго местоположения 108 для обеспечения их радиосвязью. Каждый из передатчиков 104 предпочтительно передает идентификатор местоположения 204, 208 (фиг. 2), имеющий некоторое значение местоположения, ассоциированное с первым или вторым местоположением 106, 108, в котором находится данный передатчик. Приемник, расположенный внутри одного из местоположений 106, 108, например портативный радиоприемник 110, скорее всего принимает один идентификатор местоположения 204, 208, соответствующий первому или второму местоположению 106, 108, в котором находится данный портативный радиоприемник 110. Приемник, расположенный возле границы между первым и вторым местоположениями 106, 108, например портативный радиоприемник 112, может иногда принимать значения местоположения, соответствующие и первому, и второму местоположениям 106, 108, в зависимости от эффектов затенения и многолучевого распространения в любой определенный момент времени.
Несмотря на то, что портативный радиоприемник 112 может принимать в какой-то момент времени либо ближайший передатчик 104 в первом местоположении 106, либо более удаленный передатчик 104 во втором местоположении 108, идентификатор местоположения 204, 208 от ближайшего передатчика 104 обладает большей вероятностью надежного приема в течение времени. Следовательно, согласно предпочтительному и альтернативным вариантам изобретения портативный радиоприемник 110, 112 предпочтительно реагирует не исключительно на один идентификатор местоположения 204, 208, принимаемый в данный момент времени. Вместо этого портативный радиоприемник 110, 112 предпочтительно контролирует и сохраняет в памяти множество идентификаторов местоположения 204, 208, принятых в установленный интервал времени, например достаточный, чтобы принять десять передач идентификаторов местоположения 204, 208. При этом, с помощью вероятностных способов определения значения местоположения, принятого наиболее надежно за установленный период, как будет описано ниже, портативный радиоприемник 110, 112 определяет это значение как значение местоположения, переданное ближайшим передатчиком.
Система радиосвязи по фиг. 1 предпочтительно связана с телефонной сетью общего пользования (PSTN) 116 через телефонные магистральные линии 114 для связи с абонентами, пользующимися телефонами 120, подключенными к PSTN 116 через телефонные линии 118. В одном варианте выполнения данной системы радиосвязи абоненты могут направлять вызовы к контроллеру 102, чтобы передать поисковые радиовызовы абонентам приемника 110, 112 известным в данной области способом.
Предпочтительно контроллер 112 аналогичен пейджинговому центру управления серии MPS 2000, передатчики аналогичны передатчику серии C73 PURC 5000®, а портативный радиоприемник 110, 112 - пейджеру серии A03KLB5962CA ADVISOR®, выпускаемых компанией Motorola Inc. При этом подразумевается, что и другая аналогичная аппаратура может быть использована для создания системы радиосвязи по фиг. 1.
В дальнейшем описывается три варианта данного изобретения. Согласно предпочтительному варианту, идентификаторы местоположения 204, 208 передают как одновременные передачи с передатчиков 104 и разряды/символы идентификаторов местоположения 204, 208, принимаемые в течение установленного интервала времени, запоминают в портативном радиоприемнике 110, 112. После этого разряды/символы, ассоциированные с каждой позицией разряда/символа идентификатора местоположения 204, 208, сравнивают друг с другом. Если больше, чем предпочтительный процент, например 70% разрядов/символов в данной позиции разряда/символа, имеют одинаковое значение, тогда это значение становится оценочным значением данной позиции разряда/символа. Полученный идентификатор местоположения 204, 208, содержащий оценочные значения разрядов/символов для всех позиций разряда/символа принимают за значение наиболее надежно принимаемого местоположения и, следовательно, за значение местоположения, переданного передатчиком 104, ближайшим к данному портативному радиоприемнику 110, 112. Предпочтительный вариант наиболее подходит для приемника, который быстро перемещается в условиях многолучевого распространения, так как он позволяет анализировать принимаемые данные и сравнивать их за максимально короткий срок, например за интервал времени одного разряда или символа.
Согласно первому альтернативному варианту изобретения идентификаторы местоположения 204, 208 передают как одновременные частотно-модулированные (ЧМ) передачи. Портативный радиоприемник 110, 112 является ЧМ-приемником с определенным коэффициентом захвата, т.е. способным точно принимать первый сигнал в присутствии второго (отличающегося) сигнала, если первый сигнал сильнее второго как минимум на коэффициент захвата приемника, например 3 дБ. Передачи идентификаторов местоположения 204, 208 контролируют в течение установленного интервала времени, считая, что эффект захвата портативного радиоприемника 110, 112 обеспечит более частый прием портативным радиоприемником 110, 112 идентификатора местоположения 204, 208 от ближайшего передатчика 104, чем от других передатчиков в течение установленного интервала времени. В конце установленного интервала времени значения местоположений группируют в группы сходных значений и предполагают, что самая большая группа имеет значение местоположения, переданное ближайшим передатчиком. Для первого альтернативного варианта требуется меньше вычислительных ресурсов, чем в предпочтительном варианте, но при этом невозможно так же быстро реагировать на быстро изменяющиеся условия многоканального распространения, как в предпочтительном варианте, потому что в первом альтернативном варианте сравнивают принятые сигналы для многих позиций разрядов символов, а не для только одного.
Согласно второму альтернативному варианту изобретения идентификаторы местоположения 204, 208 передают последовательно, по одному идентификатору местоположения 204, 208 за временной интервал, так что каждый может быть принят без помех в течение установленного интервала времени. Портативный радиоприемник 110, 112 измеряет уровень принятого сигнала каждой передачи и запоминает идентификаторы местоположения 204, 208 и соответствующие уровни сигналов. В конце установленного периода портативный радиоприемник 110, 112 определяет средний уровень сигнала за установленный период каждого временного интервала (слота). Идентификатор местоположения 204, 208, соответствующий временному интервалу с максимальным средним уровнем сигнала, принимают за идентификатор, имеющий значение местоположения, переданное ближайшим передатчиком. Второй альтернативный вариант больше подходит для системы, в которой невозможна или нежелательна одновременная передача идентификатора местоположения 204, 208.
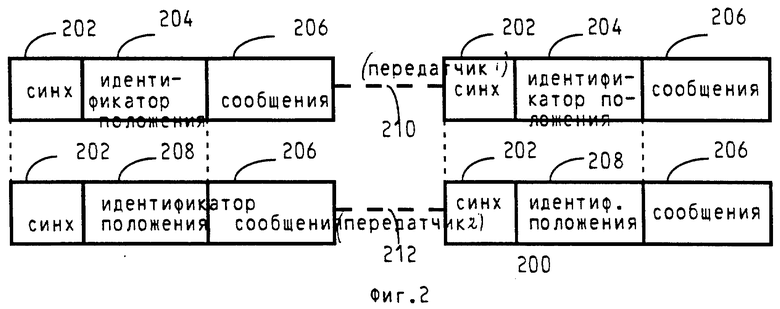
На фиг. 2 представлена временная диаграмма 200 сигнала, используемая в системе радиосвязи, изображенной на фиг. 1, согласно предпочтительному и первому альтернативному вариантам осуществления изобретения, которая поясняет протокол одновременной передачи сигналов. Временная диаграмма 200 сигнала включает передачи 210 от первого передатчика и передачи 212 от второго передатчика. В системе одновременной передачи передатчики 104 синхронизированы друг с другом таким образом, что один из передатчиков 104 передает синхрослово 202, идентификатор местоположения 204 и сообщения 206 по существу в то же время, когда другой из передатчиков 104 передает синхрослово 202, возможно другой идентификатор местоположения 208 и сообщения 206, как видно из сравнения передач 210, 212. Предпочтительно идентификаторы местоположения 204, 208 передают периодически, чтобы приемники 110, 112 принимали множество передач идентификаторов местоположения 204, 208 в установленный интервал времени.
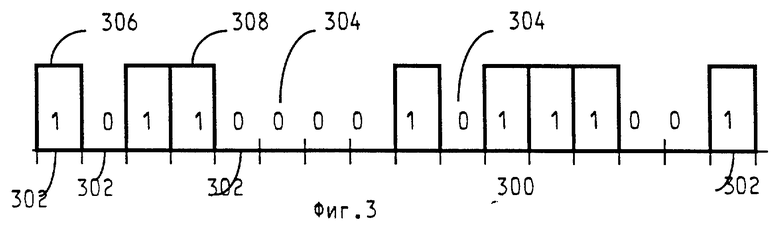
На фиг. 3 представлена типичная комбинация разрядов цифровых данных 300 для идентификаторов местоположения 204, 208, передаваемых системой радиосвязи, изображенной на фиг. 1, согласно предпочтительному, и первому, и второму вариантам осуществления изобретения, при этом данная комбинация включает в себя множество заранее установленных позиций 302 разрядов, содержащих разряды 304 со значением 0 и разряды 306 со значением 1. Разряды цифровых данных 300 представляют значение местоположения, передаваемое для идентификаторов местоположения 204, 208.
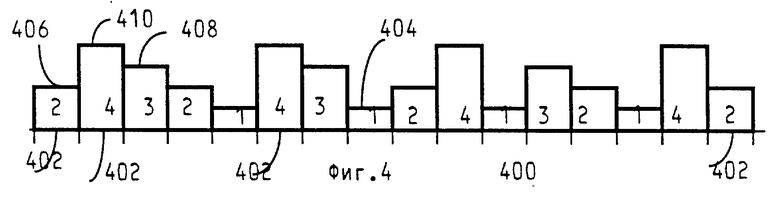
На фиг. 4 изображена типичная комбинация символов цифровых данных 400 для идентификаторов местоположения 204, 208, передаваемых системой радиосвязи, изображенной на фиг. 1, согласно предпочтительному, и первому, и второму вариантам осуществления изобретения, при этом данная комбинация включает в себя множество заранее установленных позиций 402 символов, содержащих символы 404, 406, 408, 410, представляющие, например, значения 1, 2, 3 и 4 соответственно. При этом подразумевается, что для передачи значения местоположения идентификаторов местоположения 204, 208 согласно предпочтительному и первому и второму альтернативным вариантам осуществления изобретения, можно выбрать либо разряды, либо символы, и что выбор определяется при разработке.
На фиг. 5 показана электрическая структурная схема портативного радиоприемника 110, 112 согласно предпочтительному, и первому, и второму альтернативным вариантам осуществления изобретения, который содержит антенну 502 для приема радиопередач, содержащих идентификаторы местоположения 204, 208, передаваемых передатчиками 104. Антенна 502 связана с обычным приемным элементом 504 для демодуляции радиопередач. Приемный элемент 504 подключен к процессору 506 для декодирования и обработки информации, содержащейся в передаваемом радиосигнале и включающей в себя идентификаторы местоположения 204, 208. Процессор 506 подключен к запоминающему устройству 508, например обычному запоминающему устройству с произвольной выборкой (ЗУПВ), для сохранения идентификаторов местоположения 204, 208 в его ячейках памяти 510. Процессор 506 также подключен к элементу вывода информации 512, например обычному жидкокристаллическому дисплею, для отображения принятой информации.
Процессор 506 также связан с абонентскими органами управления 514, например традиционными кнопками и клавишами, позволяющими абоненту управлять работой портативного радиоприемника 110, 112. Кроме того, процессор 506 подключен к элементу предупреждения 516, например обычному пьезоэлектрическому преобразователю или лампе для выдачи светового или звукового предупреждения в ответ на прием информации, предназначенной для данного портативного радиоприемника 110, 112. Обычные часы 518 также подключены к процессору 506 для обеспечения сигнала времени для процессора 506.
Процессор 506 содержит элементы аппаратно-программного обеспечения, включающие реле времени приема 520 для измерения установленного интервала времени, в течение которого портативный радиоприемник 110, 112 контролирует передачи идентификаторов местоположения 204, 208. Элементы аппаратно-программного обеспечения предпочтительно также включают в себя протокольный процессор 522 для обработки идентификаторов местоположения 204, 208 в соответствии с протоколом, содержащим код с обнаружением ошибок, код с исправлением ошибок или код с обнаружением и исправлением ошибок, чтобы более точно определить значение наиболее надежно принимаемого местоположения для идентификаторов местоположения 204, 208, как будет описано ниже.
Предпочтительно процессор 506 аналогичен микроЭВМ серии MC68HC05, CO 8 или C11, выпускаемым компанией Моторола, Инк. При этом подразумевается, что и другие аналогичные устройства могут быть также использованы в качестве процессора 506. Кроме того, запоминающее устройство 508 и часы 518 могут быть интегрированы с процессором 506.
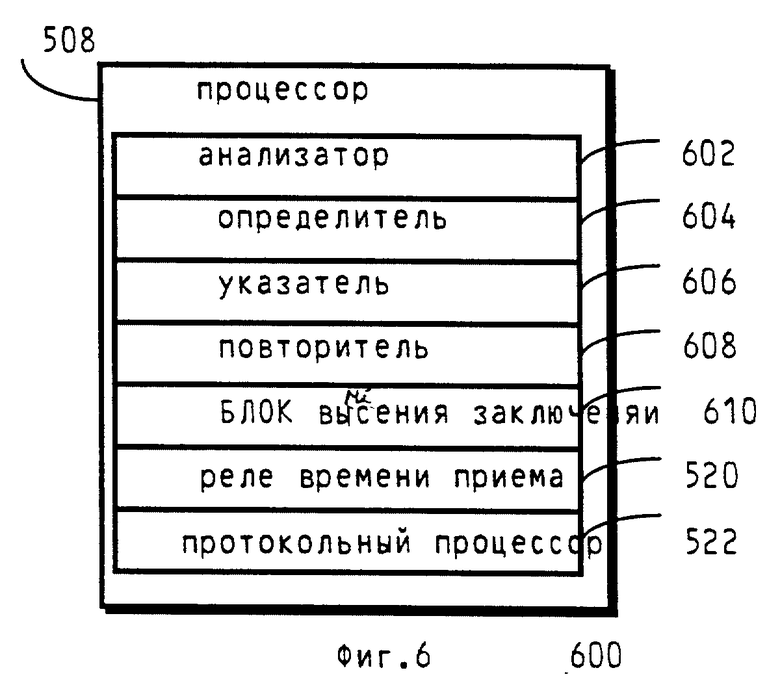
Согласно фиг. 6 схема аппаратно-программного обеспечения 600, изображающая элементы аппаратно-программного обеспечения, используемые в процессоре 506 портативного радиоприемника 110, 112 согласно предпочтительному варианту изобретения, содержит анализатор 602 для анализа одного из множества установленных позиций разрядов/символов 302/402 для разрядов/символов цифровых данных 300/400, соответствующих идентификаторам местоположения 204, 208, принятым и сохраненным в памяти в течение установленного интервала времени, измеренного реле времени приема 520. На схеме аппаратно-программного обеспечения также показан определитель 604, подключенный к анализатору 602 для определения того, что больше установленного процента разрядов/символов цифровых данных 300/400 в одном из множества установленных позиций разрядов/символов 302/304 имеют одно и то же равное значение.
Схема аппаратно-программного обеспечения также содержит указатель 606, связанный с определителем 604 для указания упомянутого одного и того же равного значения в качестве оценочного значения разряда/символа для одной из множества установленных позиций разрядов/символов 302/402. Кроме того, схема аппаратно-программного обеспечения содержит повторитель 608 для повторения анализа, определения и указания для каждой из множества установленных позиций разряда/символа 302/402 до тех пор, пока не будет указано множество оценочных значений разрядов/символов, соответствующее множеству установленных позиций разряда/символа 302/402. Элементы аппаратно-программного обеспечения также содержат блок вынесения заключения 620, делающий вывод, что данное множество оценочных значений разрядов/символов представляет наиболее достоверное значение местоположения, принятое за установленный интервал времени. При этом подразумевается, что некоторые или все элементы аппаратно-программного обеспечения 600 могут быть также реализованы в аппаратном исполнении, например, на заказной интегральной схеме.
На фиг. 7 представлена блок-схема алгоритма работы портативного радиоприемника 110, 112 согласно предпочтительному, и первому, и второму вариантам осуществления изобретения, начинающегося с того, что процессор 506 устанавливает (этап 702) реле времени приема 520 на заданную величину. Затем приемный элемент 504 принимает (704) следующую одну из множества периодических передач, включающих идентификатор местоположения 204, 208. После этого процессор 506 выходит (706) в одну из подпрограмм запоминания 800, 1800 (фиг. 8, 18) для запоминания в следующей свободной ячейке памяти 510 данных, полученных из принятой передачи, причем эти данные содержат идентификатор местоположения 204, 208. В частности, подпрограмму запоминания 800 используют в предпочтительном и первом вариантах осуществления изобретения, а альтернативную подпрограмму запоминания 1800 используют во втором альтернативном варианте осуществления изобретения.
Когда процессор 506 возвращается (708) из одной из подпрограмм запоминания 800, 1800, он проверяет (710), истекло ли время реле времени приема 520. Если нет, процессор 506 возвращается к этапу 704 для приема другой периодической передачи. Если же время реле времени приема истекло, процессор 506 выходит (712) в одну из подпрограмм сравнения 900, 1300, 1900 (фиг. 9, 13, 19), чтобы сравнить части запоминаемых данных друг с другом и определить наиболее достоверное значение местоположения, соответствующее тем из периодических передач, которые имеют максимальную среднюю надежность приема. В частности, подпрограммы сравнения 900, 1300 и 1900 используются для обработки в предпочтительном варианте, первом и втором альтернативных вариантах соответственно.
Когда процессор 506 возвращается (714) из одной из подпрограмм сравнения 900, 1300, 1900, он проверяет (716), получено ли заранее установленное значение ошибки. Если да, процессор принимает решение (718), что невозможно определить достоверное значение местоположения, а затем возвращается к этапу 702, чтобы начать все сначала. Если же получено действительное наиболее достоверное значение местоположения, процессор 506 определяет (720) это значение как значение идентификатора ближайшего местоположения 204, 208, т. е. идентификатора 204, 208, переданного передатчиком, ближайшим к данному портативному радиоприемнику 110, 112. После этого процессор 506 возвращается к этапу 702, чтобы начать процесс сначала.
Таким образом, изобретение позволяет надежно отличать идентификатор ближайшего местоположения 204, 208 от идентификаторов более удаленного местоположения 204, 208 в системе радиосвязи, обеспечивая тем самым более высокую степень уверенности, что оперативные решения на основании принятого идентификатора местоположения 204, 208 будут правильными.
На фиг. 8 показана блок-схема алгоритма подпрограммы запоминания 800 согласно предпочтительному и первому альтернативному вариантам осуществления изобретения, который начинается с того, что процессор 506 выбирает (802) следующую свободную ячейку памяти 510 в запоминающем устройстве 508 для запоминания идентификатора местоположения 204, 208. Процессор 506 сохраняет (804) идентификатор местоположения 204, 208 в выбранной ячейке памяти 510 и возвращается (806) к алгоритму 700 (фиг. 7).
На фиг. 9 изображена блок-схема алгоритма подпрограммы сравнения 900 согласно предпочтительному варианту осуществления изобретения, который начинается с того, что процессор 506 обращается к анализатору 602 для анализа (902) в одной из множества позиций разряда/символа 302, 402 разрядов/символов цифровых данных, соответствующих идентификаторам местоположения 204, 208, принятым и сохраненным за установленный интервал времени. Затем процессор 506 обращается к определителю 604, чтобы определить (904, 906), имеет ли больше установленного процента разрядов/символов цифровых данных в данной позиции разряда/символа данных одно и то же равное значение. Если да, процессор 506 обращается к указателю 606, чтобы указать (910) это одно и то же равное значение как оценочное значение разрядов/символов для данной позиции разряда/символа. Затем процессор 506 обращается (912) к повторителю 608, чтобы повторять (912, 914) этапы анализа, определения и указания для каждой из множества позиций разряда/символа, возвращаясь к этапу 902 до тех пор, пока оценочное значение разряда/символа не будет указано для всех позиций разряда/символа.
Если же на этапах 904, 906 процессор 506 не определил, что больше установленного процента разрядов/символов цифровых данных в данной позиции разряда/символа имеют одно и то же равное значение, тогда он маркирует (908) оценочное значение разряда/символа для данной позиции как неопределенное. После чего процедура переходит к этапу 912, как и раньше.
Если на этапе 914 процессор 506 определяет, что значения для всех позиций разрядов/символов были оценены, он обращается к протокольному процессору 522, чтобы обработать (916) множество оценочных значений разрядов/символов для исправления или обнаружения ошибок в них в соответствии с используемым типом протокола. Это значит, что если используют протокол с обнаружением ошибок, значение местоположения, представленное оценочными значениями разрядов/символов, может быть проверено на отсутствие в нем ошибок. Если используют протокол с исправлением ошибок, можно исправить до установленного количества ошибок в разрядах/символах. Протоколы с обнаружением ошибок, с исправлением ошибок или с обнаружением и исправлением ошибок, используемые в протокольном процессоре 522, традиционные и хорошо известны специалистам.
Если после обнаружения/исправления ошибок процессор 506 определяет (918), что данное множество оценочных значений битов/символов свободно от ошибок, он обращается к блоку вынесения заключения 610, чтобы сделать вывод (922), что данное множество оценочных значений разрядов/символов представляет наиболее достоверное значение местоположения, которое затем возвращается в алгоритм 700 (фиг. 7). Если же процессор 506 определяет на этапе 918, что данное множество оценочных значений битов/символов не свободно от ошибок, он возвращает (920) установленное значение ошибки в алгоритм 700.
На фиг. 10 представлена электрическая структурная схема первого альтернативного варианта осуществления приемного элемента 1000, который согласно первому альтернативному варианту осуществления изобретения содержит обычный ЧМ-демодулятор 1002. ЧМ-демодулятор 1002 характеризуется определенным коэффициентом захвата. Как было описано выше для условий одновременной ЧМ-передачи, первый альтернативный приемный элемент 1000 выполнен с возможностью точно принимать первый сигнал в присутствии второго (отличающегося) сигнала, если первый сигнал сильнее второго по меньшей мере на определенный коэффициент захвата. Это означает, что если первый идентификатор местоположения 204, 208, переданный ближайшим передатчиком, принят более сильным по меньшей мере на определенный коэффициент захвата, чем второй идентификатор местоположения 204, 208, переданный с более удаленного передатчика, тогда первый идентификатор местоположения 204, 208 является тем, который будет "захватывать" данный портативный радиоприемник 110, 112. Вследствие затенения и многолучевого распространения ближайший передатчик не может быть принят как наиболее сильный в течение 100% времени. Однако с вероятностной точки зрения в течение установленного интервала времени весьма вероятно, что ближайший передатчик будет захватывать данный портативный радиоприемник 110, 112 в течение большинства передач. Именно этот факт заложен в основу первого альтернативного варианта.
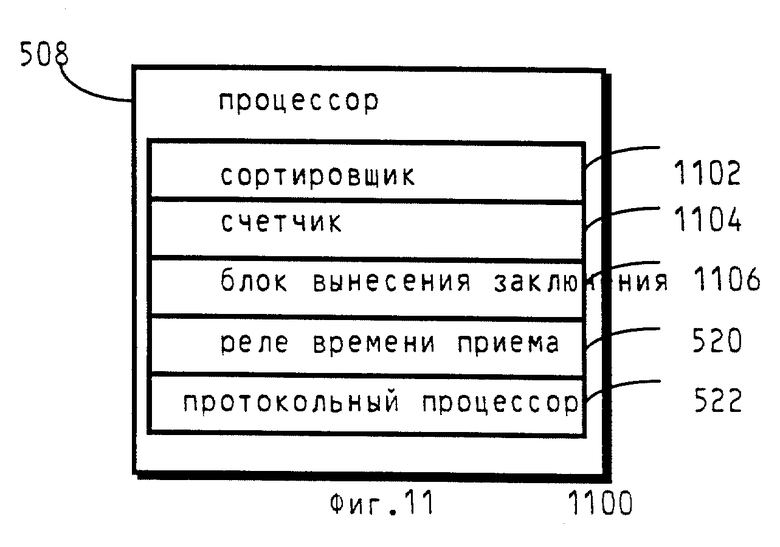
На фиг. 11 показана первая альтернативная схема аппаратно-программного обеспечения, показывающая элементы аппаратно-программного обеспечения, используемые процессором 506 в портативном радиоприемнике 110, 112 согласно первому альтернативному варианту изобретения, и содержащая сортировщик 1102 для сортировки на группы сходных значений полученных значений местоположения, которые равны друг другу. В первой альтернативной схеме аппаратно-программное обеспечение 1100 содержит счетчик 1104 для подсчета значений местоположения, рассортированных в группы сходных значений для определения группы сходных значений с максимальным отсчетом. Первая альтернативная схема аппаратно-программного обеспечения 1100 содержит блок вынесения заключения 1106 для принятия решения, что значение местоположения той из групп сходных значений, которая имеет максимальный отсчет, является наиболее достоверным значением местоположения. При этом подразумевается, что некоторые из элементов аппаратно-программного обеспечения, показанные на первой альтернативной схеме 1100, могут быть реализованы в аппаратном воплощении, например, на заказной интегральной схеме.
На фиг. 12 представлена первая альтернативная схема использования запоминающего устройства 1200 для портативного радиоприемника 110, 112 согласно первому альтернативному варианту изобретения, на которой показаны групповые идентификаторы 1202 для идентификации групп сходных значений. На этой схеме показаны ячейки отсчетов 1204, соответствующие групповым идентификаторам 1202, для сохранения отсчетов значений местоположений, рассортированных в каждую из групп сходных значений, и соответствующие сегменты 1206 идентификаторов местоположения, для запоминания значения местоположения, соответствующего каждой из групп сходных значений. Кроме того, на первой альтернативной схеме использования памяти 1200 показаны признаки (флаги) совпадения 1208, соответствующие каждой из ячеек 510 запоминающего устройства, содержащей идентификатор местоположения 204, 208, показывающие, что данный идентификатор местоположения 204, 208 был сравнен с другими идентификаторами местоположения 204, 208, сохраненными в запоминающем устройстве 508.
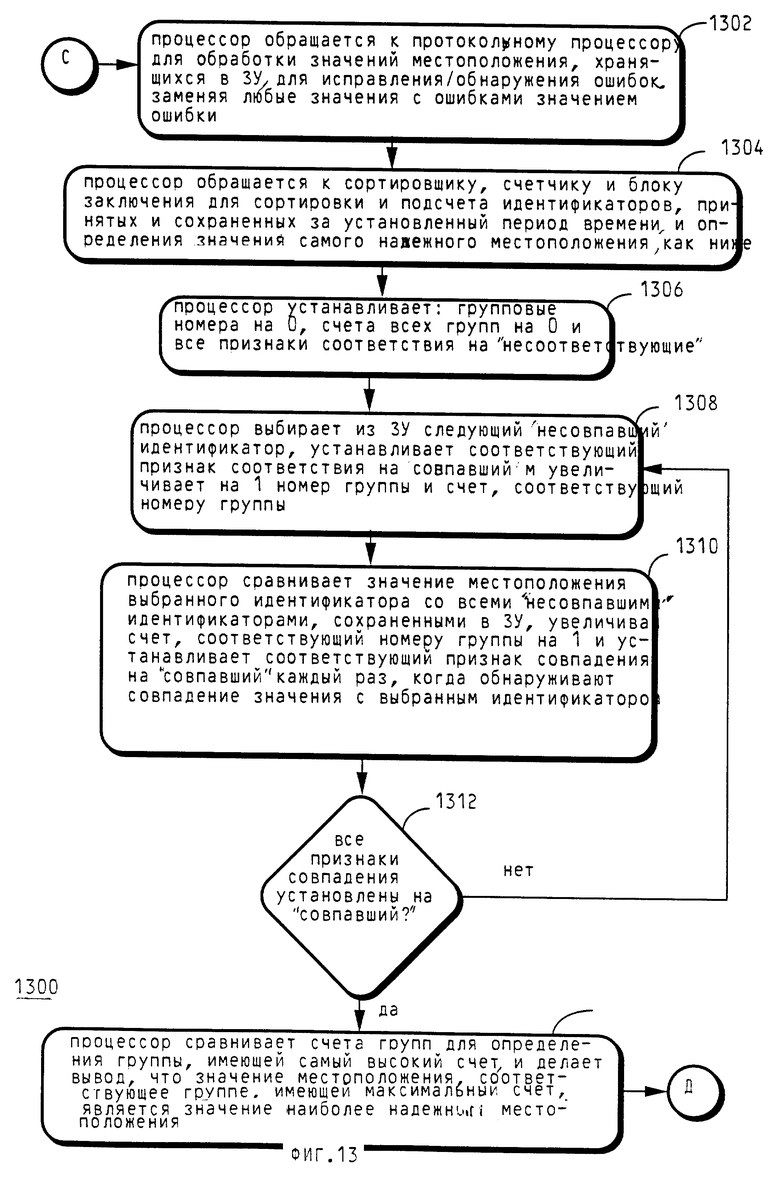
На фиг. 13 показан алгоритм первой альтернативной подпрограммы сравнения 1300 согласно первому альтернативному варианту осуществления изобретения, который начинается с того, что процессор 506 обращается к протокольному процессору 522 для обработки (1302) значений местоположения идентификаторов местоположения 204, 208, сохраненных в ЗУ 508. При этой обработке исправляют/обнаруживают ошибки в значениях местоположения согласно используемому протоколу. Значение местоположения, содержащее ошибку, после обработки заменяют установленным значением ошибки.
Затем процессор 506 обращается (1304) к сортировщику 1102, счетчику 1104 и блоку вынесения заключения 1106, чтобы рассортировать и подсчитать идентификаторы местоположения 204, 208 и определить наиболее достоверное значение местоположения. В частности, процессор 506 устанавливает (1306) номер отслеживания группы на 0, отсчеты всех ячеек отсчетов 1204 на 0 и все признаки совпадения 1208 на "несовпадающие". Затем процессор 506 выбирает (1308) из ЗУ 508 "несовпадающий" идентификатор местоположения 204, 208 из одной ячейки 510 ЗУ. Процессор 506 устанавливает соответствующий признак совпадения 1208 на "совпадающий" и увеличивает на один число отслеживания группы и отсчет в ячейке отсчетов 1204, соответствующей тому групповому идентификатору 1202, который совпадет с данным числом отслеживания группы. Процессор также записывает значение местоположения выбранного идентификатора местоположения 204, 208 в соответствующий сегмент идентификатора местоположения 1206.
Затем процессор 506 сравнивает (1310) значение местоположения выбранного идентификатора местоположения 204, 208 со всеми "несовпадающими" идентификаторами местоположения 204, 208, хранящимися в ЗУ 508. Каждый раз, когда встречается значение местоположения, совпадающее со значением выбранного идентификатора местоположения 204, 208, процессор 506 увеличивает отсчет в ячейке отсчетов 1204, соответствующей идентификатору группы 1202, и устанавливает признак совпадения 1208, соответствующий ячейке памяти 510, содержащей данное совпадающее значение местоположения, на "совпадающий".
Затем процессор проверяет (1312), все ли признаки совпадения 1208, соответствующие ячейкам 510 ЗУ, которые содержат значение местоположения, установлены на "совпадающий". Если нет, процессор 506 возвращается к этапу 1308, чтобы выбрать следующий "несовпадающий" идентификатор местоположения 204, 208 для сопоставления. Если же на этапе 1312 процессор 506 определяет, что все признаки совпадения 1208, соответствующие ячейкам 510 ЗУ, которые содержат значение местоположения, установлены на "совпадающий", тогда он сравнивает (1314) отсчеты, содержащиеся в ячейках отсчетов 1204, чтобы определить группу, имеющую максимальный отсчет. После этого процессор 506 делает заключение, что значение местоположения, содержащееся в данном сегменте идентификатора местоположения 1206, соответствующем группе с максимальным отсчетом, является наиболее достоверным значением местоположения, которое затем возвращается в алгоритм 700 (фиг.7).
На фиг. 14 показана альтернативная временная диаграмма 1400 сигнала, используемая в системе радиосвязи согласно второму альтернативному варианту осуществления изобретения, аналогичная временной диаграмме 200 сигнала. Существенное различие между ними состоит в том, что передачу синхрослова 202 и идентификатора местоположения 204, 208 производят последовательно. Это значит, что каждое синхрослово 202 и каждый идентификатор местоположения 204, 208, соответствующий передаче 1402, 1404, предпочтительно передают в выделенном для передачи временном интервале, который не перекрывается с какими-либо другими временными интервалами передачи, используемыми в данной системе в одной и той же общей зоне приема. При этом подразумевается, что сообщения 206 могут передаваться одновременно, как показано на фиг. 14, или тоже последовательно.
На фиг. 15 представлена электрическая структурная схема второго альтернативного варианта приемного элемента 1500 согласно второму альтернативному варианту осуществления изобретения, который содержит обычный индикатор уровня принятого сигнала (RSSI) 1502 для измерения и сообщения процессору 506 уровня сигнала в принятых передачах.
На фиг. 16 показана схема второго альтернативного варианта использования запоминающего устройства 1600 для портативного радиоприемника 110, 112 согласно второму альтернативному варианту осуществления изобретения, на которой показаны ячейки индикатора RSSI 1602 для запоминания уровня принятого сигнала, соответствующего значениям местоположения, сохраненным в ячейках 510 ЗУ. Для каждого временного интервала передачи есть идентификатор временного интервала 1604, разряд идентификатора местоположения, соответствующего данному временному интервалу, и соответствующий разряд для среднего уровня сигнала 1608.
На фиг. 17 показана вторая альтернативная схема аппаратно-программного обеспечения 1700, показывающая элементы аппаратно-программного обеспечения, используемые процессором в портативном радиоприемнике 110, 112 согласно второму предпочтительному варианту осуществления изобретения, которая содержит вычислитель 1702 для вычисления из принятых уровней сигнала, хранящихся в ячейках индикатора RSSI 1602, для каждого временного интервала передачи среднего значения уровня принятого сигнала в периодических передачах, имевших место в течение установленного интервала времени. Вторая альтернативная схема аппаратно-программного обеспечения 1700 также содержит анализатор 1704 для анализа вычисленных средних значений уровня принятого сигнала, чтобы определить временной интервал передачи с максимальным средним значением уровня принятого сигнала. В схеме 1700 также содержится указатель 1706, связанный с анализатором для указания значения местоположения, принятого во время данного временного интервала передачи, как наиболее достоверного значения местоположения. При этом подразумевается, что некоторые или все элементы аппаратно-программного обеспечения 1700 во второй альтернативной схеме могут быть реализованы на аппаратном уровне, например на заказной интегральной схеме.
На фиг. 18 представлена блок-схема алгоритма альтернативной подпрограммы запоминания 1800 согласно второму альтернативному варианту осуществления изобретения, которая начинается с того, что процессор 506 выбирает (1802) следующую свободную ячейку 510 ЗУ и ячейку RSSI 1602 для запоминания идентификатора местоположения 204, 208 и соответствующего уровня принятого сигнала. Затем процессор 506 запоминает (1804) идентификатор местоположения 204, 208 и уровень принятого сигнала, соответствующий принятой периодической передаче, в выбранной ячейке 510 ЗУ и ячейке RSSI 1602. После этого процессор 506 вновь возвращается (1806) к алгоритму 700 (фиг. 7).
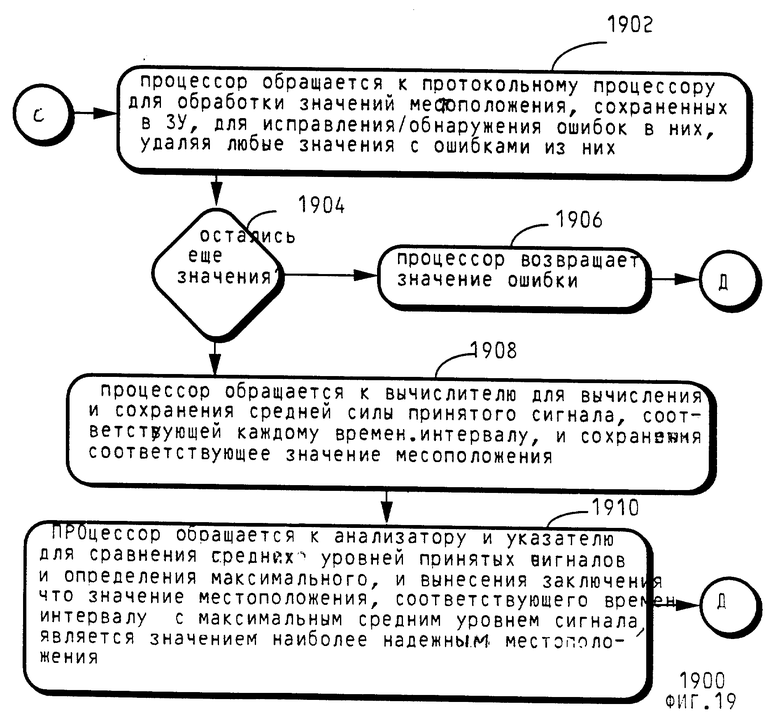
Показанная на фиг. 19 блок-схема алгоритма второй альтернативной подпрограммы сравнения 1900 согласно второму альтернативному варианту осуществления изобретения начинается с того, что процессор 506 обращается к протокольному процессору 522, чтобы обработать 1902 значения местоположения, сохраненные в ячейках 510 ЗУ и исправить/обнаружить ошибки в них. Любое значение местоположения, содержащее ошибку, после этой обработки удаляют. Затем процессор 506 проверяет (1904), остались ли еще значения местоположения. Если нет, процессор возвращает (1906) установленное значение ошибки в алгоритм 700 (фиг. 7).
Если же на этапе 1904 процессор 506 определит, что осталось по меньшей мере одно значение местоположения, он обращается к вычислителю 1702 для вычисления 1908 из уровней принятых сигналов, сохраненных в ячейках RSSI 1602 за установленный интервал времени, среднего уровня принятого сигнала, соответствующего каждому временному интервалу, т. е. соответствующего каждому индивидуальному значению местоположения, сохраненному в ячейках 510 ЗУ. Затем процессор сохраняет вычисленный средний уровень сигнала в поле 1608 среднего уровня сигнала, соответствующем данному временному интервалу. Процессор 506 также сохраняет значение местоположения, соответствующее данному временному интервалу, в соответствующем поле 1606 идентификатора местоположения. Затем процессор обращается к анализатору 1704 и указателю 1706 для сравнения (1910) вычисленных средних уровней принятого сигнала, сохраненных в сегментах 1608 среднего уровня сигнала, чтобы определить максимальный средний сохраненный уровень принятого сигнала. Процессор 506 делает заключение, что значение местоположения, сохраненное в сегменте 1606 идентификатора местоположения, соответствующем временному интервалу, имеющему максимальный средний уровень принятого сигнала, является наиболее достоверным значением местоположения, значение которого возвращается в алгоритм 700.
Таким образом, предложены способ и устройство для различения информации о местоположении, которую передает ближайший передатчик, от информации, переданной более удаленными передатчиками в системе, даже в присутствии изменяющихся во времени эффектов затенения и многолучевого распространения. Изобретение обеспечивает более высокую степень достоверности оперативных решений, принятых на основании полученной информации о местоположении.








Способ и устройство для системы радиосвязи предусматривают многократную передачу и прием идентификаторов, включающих ближний идентификатор, принимаемый радиоприемником (110, 112) от ближнего передатчика (104), и удаленные идентификаторы, принимаемые от более удаленных передатчиков (104). Способ и устройство обеспечивают вероятностное различение ближнего идентификатора от удаленных идентификаторов посредством определения идентификатора, принятого наиболее надежно за установленный интервал времени, что и является достигаемым техническим результатом. 4 с. и 1 з.п.ф-лы, 19 ил.
| US 5208756 A, 04.05.93 | |||
| US 5230081 A, 20.07.93 | |||
| Система передачи сообщений | 1989 |
|
SU1617668A1 |
| Система передачи данных | 1988 |
|
SU1566518A1 |

