Область техники, к которой относится изобретение
Изобретение относится к определению местоположения в системах радиосвязи и, в частности, к оценке ковариационной матрицы для решения методом взвешенных наименьших квадратов.
Уровень техники
Известны системы радиосвязи, в которых мобильные станции (напр., мобильные радиостанции в автомобилях или портативные персональные радиостанции) осуществляют радиосвязь со стационарной инфраструктурой связи, содержащей множество географически разнесенных приемопередатчиков. В этих системах известны способы определения информации о местоположении для данной мобильной станции. В частности, хорошо известное решение методом взвешенных наименьших квадратов (ВНК) можно использовать для определения информации о местоположении, как это описано, например, в патенте США N 5416712, выданном Гайеру и др.
Вкратце, в методе ВНК для определения местоположения делается попытка итеративно вывести оценку местоположения для мобильной станции, исходя отчасти из оценок расстояния между мобильной станцией и стационарными передатчиками, местоположение которых известно. Поскольку расстояние можно вычислить как произведение скорости и времени, то оценки расстояния (называемые псевдодистанциями, или ПД) вычисляют на практике умножением задержек распространения между мобильной станцией и стационарными передатчиками на скорость света. Предполагая, что задержки распространения измерены идеально, местоположение мобильной станции можно вычислить с помощью псевдодистанций с минимальными ошибками или без ошибок. Но задержки распространения измеряют на практике, используя переданные сигналы, которые подвергаются воздействию различных источников ошибок, напр. шума, многолучевой интерференции, искажения и пр. Возникающие при этом ошибки в измерениях задержки переходят в ошибки в псевдодистанциях и затем в ошибку оценки местоположения.
Для борьбы с наличием ошибок измерения, при решении методом ВНК вводят коэффициент надежности различных измерений и оценку местоположения. То есть для решения методом ВНК, при его применении для оценки местоположения, в большой степени исходят из измерений, имеющих большую надежность, и не принимают во внимание измерения, имеющие меньшую надежность. Таким образом, метод ВНК дает значительное с точки зрения эффективности преимущество над методами, в которых взвешивание не применяют. Но на практике надежность сигнала непосредственно измерить нельзя, поскольку она должна характеризоваться дисперсией случайной переменной величины.
Для включения надежности измерения в контекст определения местоположения в известном уровне техники предложены различные способы. Например, в патентe США N 5202829, выданном Гайеру, фильтры Калмана используют для оценки "качества" псевдодистанций, измеряемых с помощью приемников глобальной спутниковой системы радиоопределения (ГССРО), находящихся на корабле и сопровождающих буксируемых буях. Кроме этого, патент США N 5436632, выданный Шейнблату, раскрывает систему, в которой резервные приемники ГССРО в известных местоположениях (опорные станции и мониторы сохранности) применяют для коррекции измерений псевдодистанции, выполненных мобильной станцией, также оборудованной приемником ГССРО. Шейнблат описывает использование решения методом ВНК, в котором "ковариацию ошибки измерения" определяют, исходя из шума приемника, представленного ошибками между данной опорной станцией и ее соответствующим монитором сохранности.
Несмотря на то, что Гайер и Шейнблат применяют определение надежности для повышения точности оценок местоположения, эта методика не является легко адаптируемой для мобильных и портативных устройств радиосвязи. Во-первых, и для Гайера, и для Шейнблата требуется использование приемников ГССРО. Эти приемники значительно увеличивают себестоимость мобильного/портативного оборудования и чрезмерно увеличивают размер и сложность этого оборудования, особенно портативных радиостанций.
Помимо этого, как указано в '872 у Гайера, использование фильтров Калмана требует более значительную вычислительную мощность, чем для решения методом ВНК. В портативных станциях вычислительная мощность нередко ограничена соображениями размера и срока службы батарейных элементов, что делает техническое решение с применением дорогих с точки зрения организации вычислений фильтров Калмана менее привлекательным. Поэтому необходим способ, который содержит преимущества решения определения местоположения с помощью ВНК и для которого не требуется дорогостоящее оборудование ГССРО. В частности, необходима методика для оценки ковариационной матрицы для использования в решении методом ВНК.
Перечень фигур чертежей:
фиг. 1 - блок-схема системы радиосвязи;
фиг. 2 - блок-схема процессора местоположения;
фиг. 3 - схема последовательности работы мобильной станции, когда мобильная станция взаимодействует с процессором местоположения для определения местоположения мобильной станции;
фиг. 4 - схема последовательности работы процессора местоположения, когда процессор местоположения взаимодействует с мобильной станцией для определения местоположения мобильной станции;
фиг. 5 - график примеров заранее определенных взаимосвязей, используемых для определения дисперсий времени поступления;
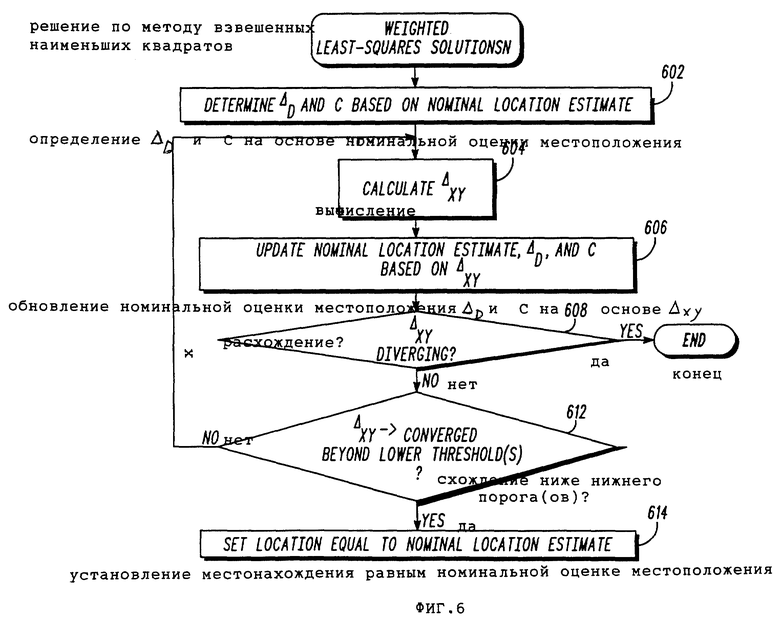
фиг. 6 - схема последовательности определения оценки местоположения с помощью решения методом взвешенных наименьших квадратов;
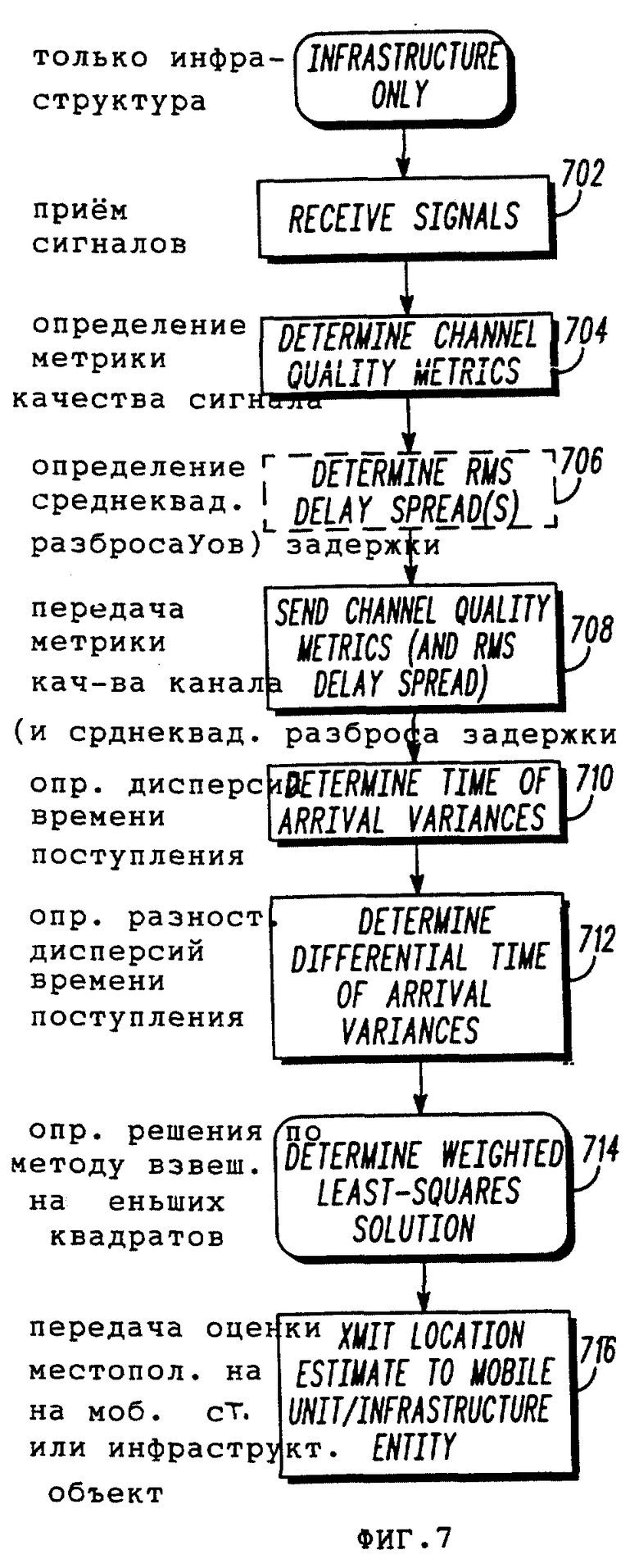
фиг. 7 - схема последовательности работы стационарной инфраструктуры, когда стационарная инфраструктура определяет местоположение мобильной станции на основе сигналов, передаваемых мобильной станцией;
фиг. 8 - блок-схема мобильной станции;
фиг. 9 - схема последовательности работы мобильной станции, представленной на фиг. 8, когда мобильная станция независимо определяет свое собственное местоположение.
Описание предпочтительного варианта осуществления изобретения
Данное изобретение обеспечивает способ и устройство для оценки ковариационной матрицы для использования в определениях местоположения по методу взвешенных наименьших квадратов. Обычно, сигналы, которыми обмениваются стационарная инфраструктура и мобильная станция, обусловливают рост (М) метрики качества канала (М ≥ 3). Метрики качества канала используют для выведения М соответствующих дисперсий времени поступления, которые в свою очередь используют для выведения М-1 разностных дисперсий времени поступления. Заранее определенные взаимосвязи используют для установления соответствия метрики качества канала с дисперсиями времени поступления. Дифференциальная весовая матрица времени поступления - оценка ковариационной матрицы - содержащая частично разностные дисперсии времени поступления, используется для вычисления решения по методу ВНК, которое является оценкой местоположения мобильной станции. Эту процедуру можно выполнить с помощью основанного на инфраструктуре процессора местоположения, который действует совместно с мобильной станцией, или ее можно выполнить либо только процессором местоположения, либо только мобильной станцией. Таким образом решение методом ВНК можно преимущественно применять в контексте определения местоположения, без необходимости использовать оборудование ГССРО.
Данное изобретение можно более наглядно описывать со ссылкой на фиг. 1-9. Фиг. 1 - блок-схема радиосвязи 100, такой как система ИДЕНTTM, изготовителем которой является компания "Моторола, Инк." Система радиосвязи 100 содержит географически разнесенные стационарные приемопередатчики 110-116, связанные с процессором местоположения 130 по сети 140 и со множеством мобильных станций 160 (показана только одна). Хотя это и не показано на фиг. 1, но каждая мобильная станция 160 содержит запоминающее устройство и одно или несколько цифровых вычислительных устройств для хранения и выполнения компьютерных программ, как известно из уровня техники.
Зона обслуживания, обеспечиваемая каждым приемопередатчиком 110-116, формирует соответствующую ячейку 120-126, которые представлены в виде шестиугольников. На практике каждый приемопередатчик 110-116 может в действительности содержать группу приемопередатчиков, хотя далее для простоты изложения предполагается, что каждая ячейка содержит только один приемопередатчик. Когда мобильная станция ведет поиск по системе 100, управление и обеспечение обслуживанием мобильной станции радиосвязью выполняет обслуживающая базовая станция. Соседними базовыми станциями являются базовые станции, расположенные вокруг базовой станции, являющейся в данное время обслуживающей базовой станцией. В примере, приведенном на фиг. 1, базовая станция, обозначенная ссылочной позицией 110, функционирует как обслуживающая базовая станция для мобильной станции 160, а базовые станции, обозначаемые ссылочными позициями 111-116, являются соседними базовыми станциями.
Приемопередатчики 110-116, которые в предпочтительном варианте осуществления обеспечивают радиоканалы в соответствии с форматом временного разделения (ВР), и процессор местоположения 130 совместно называются стационарной инфраструктурой. В условиях стационарности точное местоположение каждого приемопередатчика 110-116 известно с большой степенью точности как определенное топографической съемкой или прочими соответствующими методами измерения.
Как раскрыто ниже, данное изобретение основывается на метрике качества канала, выводимой из сигналов, принимаемых или передаваемых мобильной станцией. В предпочтительном варианте осуществления каждый из этих сигналов содержит известные символы данных, которые являются уникальными для каждого приемопередатчика. Например, в системе ИДЕН каждый приемопередатчик будет передавать свои известные символы данных всякий раз, когда становится доступным неиспользуемый временной интервал.
Сеть 140 дает возможность передавать данные и информацию управления между различными элементами инфраструктуры, и она действует в соответствии с хорошо известными протоколами сети. Стационарная инфраструктура может также содержать различные другие сетевые объекты 170, которые могут служить устройствами запроса информации местоположения для данной мобильной станции, или служить пунктом назначения для такой информации. Примеры таких инфраструктурных объектов содержат, но не ограничиваются только этим, пульты, устройства телефонного межсоединения и управленческие терминалы.
Процессор местоположения 130 содержит цифровое вычислительное устройство 131 и запоминающее устройство 132, используемое для хранения и выполнения системных программ. На практике для выполнения процессора местоположения 130 можно использовать имеющиеся в продаже компьютерные рабочие станции или изготовленные на заказ компьютерные платформы. В предпочтительном варианте осуществления раскрытые ниже способы выполняют как системные программы, находящиеся в процессоре местоположения 130 и/или мобильных станциях 160.
Фиг. 2 представляет собой блок-схему процессора местоположения 200, содержащего устройство определения дисперсии 204, устройство определения разностной дисперсии 206, соединенное с выходом устройства определения дисперсии 204, и устройство определения местоположения 208, соединенное с выходом устройства определения разностной дисперсии 206. В предпочтительном варианте осуществления каждый представленный на фиг. 2 блок выполняют как один, или несколько программных алгоритмов, хранимых в запоминающим устройстве и выполняемых цифровым вычислительным устройством процессора местоположения 200. Тем не менее подразумевается, что можно также использовать другие, непрограммные варианты осуществления.
Устройство определения дисперсии 204 принимает в качестве входного сигнала входную метрику качества канала. В соответствии с нижеследующим описанием каждая метрика качества канала уникально соответствует сигналу, принимаемому конкретной мобильной станцией, или в другом варианте осуществления сигналу, принимаемому одним из стационарных приемопередатчиков. Выходной сигнал устройства определения дисперсии 204 является дисперсиями времени поступления, имеющими полное соответствие с метрикой качества канала. Дисперсии времени поступления характеризуют неопределенность точного времени приема каждого сигнала мобильной станцией (или стационарным приемопередатчиком).
Устройство определения разностной дисперсии 206 объединяет дисперсии времени поступления для выработки разностных дисперсий времени поступления. В соответствии с изложенным выше разностные дисперсии времени поступления используют для заполнения дифференциальной весовой матрицы времени поступления, используемой в решении по методу ВНК согласно вычислению, сделанному устройством определения местоположения. 208. Выходной сигнал оценки местоположения из устройства определения местоположения 208 представляет итеративно обновляемую номинальную оценку местоположения, которая считается достаточно точной, если значения коррекции, используемые для обновления номинальной оценки, сошлись ниже минимальных пороговых значений.
В предпочтительном варианте осуществления процессор местоположения, представленный на фиг. 2, действует совместно с мобильной станцией при определении местоположения данной мобильной станции. На фиг. 3 представлено действие мобильной станции, когда информацию местоположения для мобильной станции нужно определить совместно с процессором местоположения. На этапе 302 мобильная станция принимает М сигналов от М различных географически разнесенных приемопередатчиков (М ≥ 3). Каждый из сигналов особо соответствует одному из приемопередатчиков, и каждый сигнал содержит известные символы данных, передаваемые его соответствующим приемопередатчиком.
Задержка между временем, когда были переданы известные символы данных, и когда они были приняты, служит основой определения псевдодистанций между мобильной станцией и каждым из приемопередатчиков. На практике вычисленная для данного приемопередатчика задержка фактически является средней величиной задержек, измеренных для множественных приемов известных символов данных. Обращаясь к примеру, представленному на фиг. 1, предполагается, что мобильная станция 160 принимает сигналы от трех приемопередатчиков, обозначенных как X0, X1 и X2, при этом каждый приемопередатчик также относится к своей псевдодистанции D0, D1 и D2 соответственно.
Из имеющегося уровня техники известно, что разностные псевдодистанции (РПД) можно формировать и использовать в качестве основы для определения местоположения по методу ВНК. Продолжая пример согласно фиг. 1, РПД можно определить в следующем виде:
D01 = D0-D1
D02 = D0 - D2
Несмотря на то, что обслуживающую базовую станцию в указанном выше примере используют как точку отсчета, можно также использовать одну из соседних базовых станций. На практике известные символы данных подвержены ошибкам, включая ошибки синхронизации времени передачи (ОСВП). Для учета этих ошибок измерение ПД между данным приемником и мобильной станцией определяют следующим образом:
а РПД определяется следующим образом:

где ei является известной ОСВП для i-го приемопередатчика. Если ПД вычисляются мобильной станцией, то эти ОСВП для каждого приемопередатчика можно передавать в мобильную станцию.
По получении М сигналов от приемопередатчиков мобильная станция на этапе 304 определяет М метрик качества канала. Для выведения каждой метрики качества канала предпочтительно используют среднее значение множественных приемов известных символов данных. Таким образом можно устранить воздействие измерений качества зашумленного сигнала. Метрика качества канала принимает вид отношения "несущая/помеха-плюс-шум" (C/1+N). Методика измерений этих отношений C/1+N раскрыта в патенте США 5440582 на "Способ и устройство для определения пригодности сигнала"; этот патент включен в данную заявку в качестве дословной ссылки таким образом, как если бы этот патент был полностью изложен. Но вместо C/1+N, или дополнительно к ним, можно использовать другие характеристики качества сигнала (например, уровень принимаемого сигнала). Независимо от способа ее определения каждая метрика качества канала имеет полное соответствие известным символам данных, принятым по меньшей мере от трех базовых станций (М ≥ 3). На практике одна из базовых станций будет для данной мобильной станции текущей обслуживающей базовой станцией; хотя допускается, что каждая из по меньшей мере трех базовых станций является в отношении текущей обслуживающей базовой станции и соседним участком.
На этапе 306 мобильная станция может определять М среднеквадратичных разбросов задержки, где каждый среднеквадратичный разброс задержки уникально соответствует одному сигналу из М сигналов. Из уровня техники известно, что принимаемые сигналы нередко подвержены искажению из-за многолучевой интерференции и задержек. Среднеквадратичный разброс задержки выражает стандартно отклоняющееся (или среднеквадратичное) значение задержки отражений, взвешенное пропорционально энергии отраженных волн. Таким образом, среднеквадратичный разброс задержки служит показателем воздействия имеющихся в данное время условий многолучевого распространения на известные символы данных, принимаемые мобильной станцией. Способы определения среднеквадратичных разбросов задержки известны из уровня техники.
На этапе 308 метрику качества канала и среднеквадратичные разбросы задержки, если они вычислены, направляют мобильной станцией на процессор местоположения. Исходя из предположения, что множественные приемы известных символов данных совместно усреднены при вычислении каждой метрики качества канала, то передают также число приемов использованных известных символов данных Ni.
На этапе 310, реагируя на информацию, переданную на предыдущем этапе, мобильная станция может принять оценку местоположения для мобильной станции от процессора местоположения. Также возможно, что мобильная станция, выполнив этапы 302-308, не будет принимать оценку местоположения. Это будет иметь место, например, в том случае, когда информация местоположения запрошена не мобильной станцией, а например, объектом инфраструктуры, относящимся к системе радиосвязи, или даже другой мобильной станцией.
Как представлено на фиг. 4, схема последовательности представляет работу процессора местоположения в том случае, когда информацию местоположения для мобильной станции нужно определить совместно с процессором местоположения. На этапе 402, при реагировании на запрос на определение оценки местоположения для данной мобильной станции процессор местоположения определяет М метрик качества канала для данной мобильной станции. В предпочтительном варианте осуществления метрики качества канала "определяются" процессором местоположения, когда они приняты в качестве выходящих данных от мобильной станции. В этом случае для каждой метрике качества канала также принимают число приемов известных символов данных, используемых в вычислении этой метрики качества канала. Но, как очевидно для специалистов данной области техники, процессор местоположения может сам определить соответствующую метрику качества канала, исходя из других данных, принятых от мобильной станции.
На этапе 404 процессор местоположения может принимать от мобильной станции информацию о по меньшей мере одном измерении среднеквадратичного разброса задержки. При его наличии среднеквадратичный разброс задержки предпочтительно включают вместе с метрикой качества канала и другой информацией, упоминаемой на предыдущем этапе.
На этапе 406 процессор местоположения определяет М дисперсий времени поступления, по одной для каждой метрики качества канала. До степени, в которой известные символы данных используют для выведения метрики качества канала, дисперсии времени поступления характеризуют неопределенность в измеренной задержке распространения для каждого сигнала. В предпочтительном варианте осуществления метрику качества канала отображают в дисперсиях времени поступления согласно заранее определенным взаимосвязям. На фиг. 5 представлены примеры этих заранее определенных взаимосвязей.
Каждая представленная на фиг. 5 взаимосвязь представлена кривой 501-503. Эти заранее определенные взаимосвязи выводят с помощью компьютерного моделирования и/или натурных испытаний для определения предполагаемой эффективности измерения времени при широком диапазоне условий. С помощью этих кривых 501-503 значения C/1+N (измеренные в децибеллах по горизонтальной оси) отображают в соответствующие значения дисперсий времени поступления (измеренные в микросекундах2 по вертикальной оси). Кроме изображенных возможны также и другие диапазоны значений и для горизонтальной, и для вертикальной осей, их выбирают по конструкционным соображениям. На практике каждая заданная взаимосвязь выполняется с помощь хранимых таблиц или с помощью эмпирически определенных математических функций. В фиг. 5 представлено одно семейство кривых 501-503, но возможно вывести много таких семейств.
В случае использования измерений среднеквадратичного разброса задержки каждую из кривых 501-503 индексируют соответственно определенному значению принятого среднеквадратичного разброса задержки. Каждая кривая 501-503 представляет диапазон среднеквадратичных разбросов задержки вокруг одного значения. Таким образом, в изображенных примерах первую заданную взаимосвязь, представленную первой кривой 501, используют, когда принятый среднеквадратичный разброс задержки в наибольшей степени приближается к 5,0 мс; вторую заданную взаимосвязь, представленную второй кривой 502, используют, когда принятый среднеквадратичный разброс задержки в наибольшей степени приближается к 2,5 мс; и третью заданную взаимосвязь, представленную третьей кривой 503, используют, когда принятый среднеквадратичный разброс задержки в наибольшей степени приближается к 0 мс. В том случае, когда среднеквадратичные разбросы задержки не используют, единая применяемая заранее определенная взаимосвязь будет содержать либо среднее значение различных кривых, либо она будет выбрана как кривая, соответствующая наиболее часто измеряемому среднеквадратичному разбросу задержки.
Как представлено на фиг. 4, разностное дисперсии времени поступления определяют на этапе 408 в соответствии со следующим уравнением:
То есть видно, что каждая разностная дисперсия времени поступления  является суммой масштабированной дисперсии времени поступления V0 для первой базовой станции и масштабированной дисперсии времени поступления Vi для i-соседней базовой станции в первую базовую станцию (1 <= i <= M-1). Масштабированная дисперсия времени поступления V0 для первой базовой станции является дисперсией времени поступления для первой базовой станции,
является суммой масштабированной дисперсии времени поступления V0 для первой базовой станции и масштабированной дисперсии времени поступления Vi для i-соседней базовой станции в первую базовую станцию (1 <= i <= M-1). Масштабированная дисперсия времени поступления V0 для первой базовой станции является дисперсией времени поступления для первой базовой станции,  деленной на число приемов известных символов данных, N0, дискретизированной для определения метрики качества канала (и, следовательно, дисперсией времени поступления) для первой базовой станции.
деленной на число приемов известных символов данных, N0, дискретизированной для определения метрики качества канала (и, следовательно, дисперсией времени поступления) для первой базовой станции.
Аналогичным образом масштабированная дисперсия времени поступления для i-й базовой станции Vi является дисперсией времени поступления для i-й базовой станции  деленной на число приемов использованных известных символов данных Ni. Хотя первая базовая станция предпочтительно является обслуживающей базовой станцией для рассматриваемой мобильной станции, но в равной степени возможно, что первой базовой станцией будет одна из соседних базовых станций.
деленной на число приемов использованных известных символов данных Ni. Хотя первая базовая станция предпочтительно является обслуживающей базовой станцией для рассматриваемой мобильной станции, но в равной степени возможно, что первой базовой станцией будет одна из соседних базовых станций.
Исходя из того, что средняя ошибка РПД является нулем и что измерения известных символов данных в каждой базовой станции являются некоррелированными, элементы дифференциальной весовой матрицы времени поступления (или ковариационной матрицы)  можно определить согласно следующим уравнениям:
можно определить согласно следующим уравнениям:
vjk = V0 + Vj для j = k; и
vjk = V0 для j ≠ k.
Для определения местоположения в случае первой базовой станции и М-1 соседних базовых станций дифференциальная весовая матрица времени поступления будет иметь следующий вид: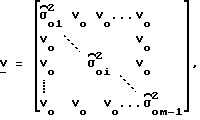
при этом  Таким образом данное изобретение обеспечивает удобный способ выполнения оценки ковариационной матрицы для использования в решении методом ВНК.
Таким образом данное изобретение обеспечивает удобный способ выполнения оценки ковариационной матрицы для использования в решении методом ВНК.
После определения ковариационной матрицы процессор местоположения на этапе 410 производит решение местоположения по методу ВНК по следующему уравнению:
Далее процедуры определения решения местоположения по методу ВНК раскрыты со ссылкой на фиг. 6. Результатом определения решения местоположения по методу ВНК является оценка местоположения для данной мобильной станции. Затем на этапе 412 оценку местоположения можно направить на мобильную станцию или объект инфраструктуры, который первоначально запросил информацию о местоположении.
На фиг. 6 представлен способ для определения оценки местоположения с помощью решения по методу ВНК. На этапе 602 дифференциальный коррекционный вектор псевдодистанции  и дифференциальную матрицу косинуса направления
и дифференциальную матрицу косинуса направления  определяют исходя из номинальной оценки местоположения, обозначаемой координатами (xn, yn). Первоначальную номинальную оценку местоположения выбирают, чтобы она находилась в пределах первой ячейки (предпочтительно - ячейки обслуживания), и также ее выбирают, исходя из типа используемых ячеек. То есть, если первая ячейка "секторизирована", как известно из уровня техники, то центр массы сектора обслуживания выбирают как первоначальную номинальную оценку местоположения. Но если первая ячейка не секторизирована, то целесообразно для первоначальной номинальной оценки местоположения выбрать точку на окружности, которая сцентрирована на первой ячейки, и приблизительно равна половине радиуса первой ячейки. Также знание именно тех соседних ячеек, которые следует использовать для определения местоположения, можно использовать для дальнейшего уточнения выбора этой точки путем возможного выбора точки, наиболее близкой к соседним ячейкам.
определяют исходя из номинальной оценки местоположения, обозначаемой координатами (xn, yn). Первоначальную номинальную оценку местоположения выбирают, чтобы она находилась в пределах первой ячейки (предпочтительно - ячейки обслуживания), и также ее выбирают, исходя из типа используемых ячеек. То есть, если первая ячейка "секторизирована", как известно из уровня техники, то центр массы сектора обслуживания выбирают как первоначальную номинальную оценку местоположения. Но если первая ячейка не секторизирована, то целесообразно для первоначальной номинальной оценки местоположения выбрать точку на окружности, которая сцентрирована на первой ячейки, и приблизительно равна половине радиуса первой ячейки. Также знание именно тех соседних ячеек, которые следует использовать для определения местоположения, можно использовать для дальнейшего уточнения выбора этой точки путем возможного выбора точки, наиболее близкой к соседним ячейкам.
Имея первоначальную номинальную оценку местоположения и зная как местоположения приемопередатчика, так и ошибки времени синхронизации передачи e0 и ei для первой базовой станции и i-го соседнего приемопередатчика (1 <= 1 <= M-1), соответственно, номинальные разностные псевдодистанции можно вычислить согласно следующему уравнению:
Dn,0i = (Dn,0 + e0) - Dn,i + ei),
где Dn,0 является известным расстоянием между номинальной оценкой местоположения и обслуживающей базовой станцией, и D0,i является известным расстоянием между номинальной оценкой местоположения и приемопередатчиком для i-й соседней базовой станции. При номинальных РПД коррекционные значения, включаемые в  вычисляют как разницу между РПД, измеренными мобильной станцией (и переданными в процессор местоположения), и номинальными РПД. Поэтому для определения местоположения в случае с первой базовой станцией и М-1 соседних базовых станций
вычисляют как разницу между РПД, измеренными мобильной станцией (и переданными в процессор местоположения), и номинальными РПД. Поэтому для определения местоположения в случае с первой базовой станцией и М-1 соседних базовых станций  определяют следующим образом:
определяют следующим образом: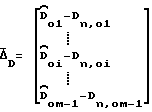
Дифференциальная матрица косинуса направления  содержит дифференциальные косинусы направления для каждой из М-1 соседних базовых станций и определяется следующим образом:
содержит дифференциальные косинусы направления для каждой из М-1 соседних базовых станций и определяется следующим образом: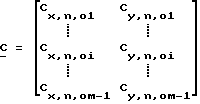
Обозначив известное местоположение i-й соседней базовой станции как (xi, yi), элементы  можно определить следующим образом:
можно определить следующим образом: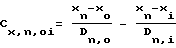

Определив  на этапе 604 можно определить номинальный коррекционный вектор
на этапе 604 можно определить номинальный коррекционный вектор  местоположения. Номинальный коррекционный вектор местоположения содержит коррекции для номинальный оценки местоположения и определяется следующим образом:
местоположения. Номинальный коррекционный вектор местоположения содержит коррекции для номинальный оценки местоположения и определяется следующим образом:
С помощью линейной алгебры для решения местоположения по методу ВНК номинальный коррекционный вектор местоположения определяется следующим уравнением:
На этапе 606 после решения для номинального коррекционного вектора местоположения номинальную оценку местоположения обновляют суммированием с  т. е. (xn+σx, yn+σy). После получения этой новой номинальной оценки местоположения в целях отражения коррекции в номинальной оценке местоположения также пересчитывают дифференциальный коррекционный вектор
т. е. (xn+σx, yn+σy). После получения этой новой номинальной оценки местоположения в целях отражения коррекции в номинальной оценке местоположения также пересчитывают дифференциальный коррекционный вектор  псевдодистанций и дифференциальную матрицу косинуса направления
псевдодистанций и дифференциальную матрицу косинуса направления  Этот процесс вычисления
Этот процесс вычисления  обновления номинальной оценки местоположения и повторного вычисления
обновления номинальной оценки местоположения и повторного вычисления  можно повторять до получения конечного решения в соответствии с нижеизложенным.
можно повторять до получения конечного решения в соответствии с нижеизложенным.
На этапе 608 определяют, имеется ли расхождение номинального коррекционного вектора местоположения. Это делается сравнением компонентов текущего номинального коррекционного вектора местоположения (σx,тек, σy,тек) с компонентами предыдущего вычисленного номинального коррекционного вектора местоположения (σx,пред, σy,пред). Конкретно расхождение считается произошедшим, когда удовлетворяются следующие условия:
σx,тек> U•σx,пред
σy,тек> U•σy,пред
где U является верхним пороговым значением, имеющим значение больше единицы, в предпочтительном варианте осуществления U имеет значение 10. Подразумевается, что вместо одного верхнего порогового значения для отдельных условий расхождения могут быть использованы Ux и Uy, имеющие разные значения. Если определено, что расхождение произошло, то дальнейшие повторы решения по методу ВНК прекращают, и оценку местоположения не определяют.
Если условия расхождения не удовлетворены, то на этапе 612 определяют, сходится ли величина номинального коррекционного вектора местоположения ниже нижнего порога L, согласно следующему уравнению:
Значение L выбирают исходя из конструкционных соображений, и при моделировании его устанавливают равным 8,05 м (0,0005 мили).
Если номинальный коррекционный вектор местоположения не сходится ниже нижнего порога, то обработка возвращается на этап 604, где решение по методу ВНК повторяют еще раз. Но если номинальный коррекционный вектор местоположения сходится, то оценку местоположения устанавливают равной текущей номинальной коррекционный оценки местоположения по этапу 614.
Ввиду вышеизложенного представляется, что настоящее изобретение обеспечивает способ усовершенствования оценки ковариационной матрицы, которая в свою очередь обеспечивает возможность эффективного с точки зрения вычислений решения по методу ВНК для использования в контексте определения местоположения. Помимо варианта осуществления, в котором процессор местоположения взаимодействует с мобильной станцией, данное изобретение также можно успешно использовать в тех случаях, когда требуется определение местоположения только с использованием стационарной инфраструктуры (приемопередатчики и процессор местоположения) или только мобильной станции. Эти другие варианты осуществления раскрыты со ссылкой на фиг. 7-9.
На фиг. 7 представлен исключительно инфраструктурный подход к определению местоположения в соответствии с данным изобретением. В частности, способ по фиг. 7 можно соответствующим образом осуществить инфраструктурой, представленной на фиг. 1 и 2. На этапе 702 М разных приемопередатчиков (М ≥ 3) каждый принимаeт представление сигнала, передаваемого мобильной станцией, в результате чего имеется М представленний сигнала. То есть каждый приемопередатчик принимает один и тот же сигнал, но подверженный условиям ошибок (т. е. замирание, помехи и пр.), которые отличны от других приемопередатчиков. Например, обращаясь к фиг. 1, приемопередатчики X0, X1 и X2 принимают сигнал, передаваемый мобильной станцией 160. В предпочтительном варианте осуществления сигнал, передаваемый мобильной станцией, является последовательностью известных символов данных, по существу эквивалентных символам, передаваемым приемопередатчиками в соответствии с изложенным выше.
На этапе 704 каждый приемопередатчик определяет метрику качества канала для ее соответствующего представления по существу тем же методом, который описан выше (фиг. 3, этап 304). Аналогичным образом на этапе 706 среднеквадратичную дисперсию задержки можно определить каждым приемопередатчиком в соответствии с изложенным выше (фиг. 3, этап 306). Также каждым приемопередатчиком определяют ПД. На этапе 708 метрика качества канала и, если имеются, среднеквадратичные дисперсии задержки передаются приемопередатчиками на процессор местоположения. Помимо этого каждый приемопередатчик передает на процессор местоположения свою ПД и число приемов известных символов данных, используемых для определения метрики качества канала.
По получению информации, переданной на этапе 708, процессор местоположения выполняет этапы 710-716 для определения ковариационной матрицы и решения местоположения по методу ВНК. Поскольку этапы 710-716 по существу эквиваленты этапам 406-412 фиг. 4, то дальнейшее их описание не представляется необходимым.
Другим вариантом осуществления настоящего изобретения является подход с применением только мобильной станции, представленный на фиг. 8-9. Фиг. 8 представляет собой блок-схему мобильной станции, соответствующую определению местоположения с применением только мобильной станции. В частности, мобильная станция 800 содержит приемник 802, устройство определения дисперсии 804, соединенное с выходом приемника 802, устройство определения разностной дисперсии 806, соединенное с выходом устройства определения дисперсии 804, и устройство определения местоположения 808, соединенное с выходом устройства определения разностной дисперсии 806. Устройство определения дисперсии 804, устройство определения разностной дисперсии 806 и устройство определения местоположения 808 структурно и функционально эквивалентны устройству определения дисперсии 204, устройству определения разностной дисперсии 206 и устройству определения местоположения 208 соответственно, которые описаны выше со ссылкой на фиг. 2. Также устройство определения дисперсии 804, устройство определения разностной дисперсии 806 и устройство определения местоположения 808 предпочтительно выполняют как один или несколько программных алгоритмов, хранимых в запоминающем устройстве и выполняемых цифровым вычислительным устройством мобильной станции. Для целей данного изобретения единственное различие между процессором местоположения 200 и мобильной станцией 800 является включение приемника 802 в состав мобильной станции 800. Как минимум приемник 802 должен быть выполнен с возможностью приема сигналов от инфраструктурных приемников и в предпочтительном варианте осуществления должен быть выполнен с возможностью приема известных символов данных от разных приемопередатчиков. Кроме этого, приемник 802 содержит описанную выше функциональную возможность, требуемую для выведения метрики качества канала из принимаемых сигналов.
Действие мобильной станции 800 далее раскрыто на фиг. 9. В частности, этапы 902-906 эквиваленты этапам 302-306 соответственно фиг. 3. То есть мобильная станция принимает сигналы от приемопередатчиков и выводит информацию, требуемую для определения решения по методу ВНК. Затем вместо того чтобы передавать эту информацию на инфраструктурный процессор местоположения, мобильная станция выполняет этапы 908-914, которые эквивалентны этапам 406-412 соответственно фиг. 4.
В соответствии с изложенным выше настоящее изобретение обеспечивает способ и устройство для оценки ковариационной матрицы для использования в определениях местоположения по методу ВНК. С помощью метрики качества канала как основы настоящее изобретение обеспечивает эффективную оценку ковариационной матрицы и ее применение в решении местоположения по методу ВНК. Поскольку решение местоположения ВНК более эффективно с вычислительной точки зрения по сравнению с методикой применения фильтров Калмана и для него не требуется использование дорогостоящих приемников ГССРО, то данное изобретение можно осуществить либо в инфраструктурном процессоре местоположения, либо в мобильной станции, или и в том и другом совместно. При помощи компьютерного моделирования было продемонстрировано, что настоящее изобретение позволяет определить местоположение для мобильной станции в пределах до 125 м (0,08 мили или 410,1 футов) ее фактического местоположения по меньшей мере в 67% случаев.
Несмотря на то, что данное изобретение раскрыто на предпочтительных вариантах его осуществления, для специалистов в данной области техники очевидно, что в него могут быть внесены различные изменения, не выходящие за рамки существа данного изобретения, сформулированные в нижеследующей формуле изобретения.






Изобретение относится к определению местоположения в системах радиосвязи. Сигналы, которыми обмениваются стационарная инфраструктура и мобильная станция, обеспечивают М метрик качества канала, каждую из которых отображают с помощью заданных взаимосвязей М соответствующих дисперсий времени поступления. Дифференциальную весовую матрицу времени поступления, которая частично содержит разностные дисперсии времени поступления, используют для вычисления решения по методу взвешенных наименьших квадратов (ВНК), и это решение является оценкой местоположения мобильной станции. Это можно выполнить с помощью процессора местоположения. Достигаемый технический результат - обеспечение эффективной оценки ковариационной матрицы и ее применение для определения местоположения мобильной станции. 4 с. и 6 з.п. ф-лы, 9 ил.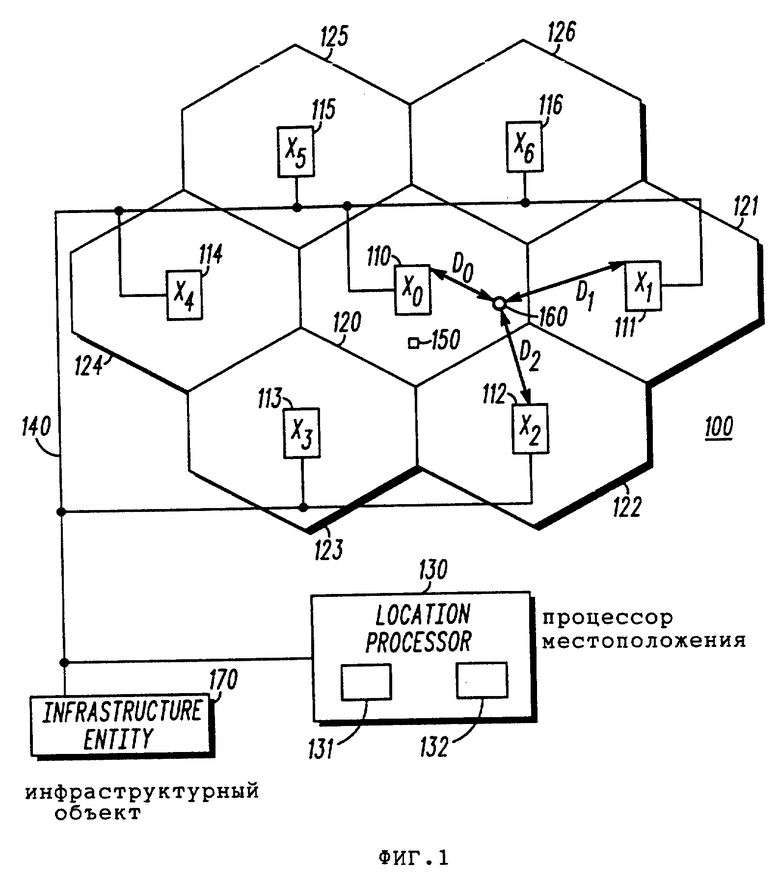
где  является i-й разностной дисперсией времени поступления;
является i-й разностной дисперсией времени поступления;
Vо является первой масштабированной дисперсией времени поступления, соответствующей первой базовой станции;
Vi является i-й масштабированной дисперсией времени поступления, соответствующей i-й из М-1 соседних базовых станций; является первой дисперсией времени поступления, соответствующей первой базовой станции;
является первой дисперсией времени поступления, соответствующей первой базовой станции; является i-й дисперсией времени поступления, соответствующей i-й соседней базовой станции;
является i-й дисперсией времени поступления, соответствующей i-й соседней базовой станции;
Nо является числом приемов известных символов данных, используемых при определении первого измерения времени поступления, соответствующего первой базовой станции;
Ni является числом приемов известных символов данных, используемых при определении i-го измерения времени поступления, соответствующего i-й соседней базовой станции;
i находится в диапазоне от 1 до М-1 включительно. псевдодистанции и дифференциальную матрицу
псевдодистанции и дифференциальную матрицу  косинуса направления на основе номинальной оценки местоположения, вычисляют номинальный коррекционный вектор
косинуса направления на основе номинальной оценки местоположения, вычисляют номинальный коррекционный вектор  местоположения согласно выражению
местоположения согласно выражению
причем дифференциальную весовую матрицу времени поступления  определяют как
определяют как
обновляют номинальную оценку местоположения, дифференциальной коррекционный вектор псевдодистанции и дифференциальную матрицу косинуса направления на основе номинального коррекционного вектора местоположения и повторно выполняют предыдущие вычисления и обновления до расхождения номинального коррекционного вектора местоположения и до схождения номинального коррекционного вектора местоположения ниже по меньшей мере одного нижнего порогового значения.
| US 5416712 А, 16.05.1995 | |||
| US 5436632 А, 25.07.1995 | |||
| US 5202829 А, 13.04.1993 | |||
| СПУТНИКОВАЯ СИСТЕМА СВЯЗИ "КИБОЛ" | 1992 |
|
RU2033693C1 |
| US 5248980 А, 28.09.1993 | |||
| US 5268694 А, 07.12.1993 | |||
| US 5301354 А, 05.04.1994. | |||

