Изобретение относится к технике автоматического регулирования и может быть использовано в системах водоснабжения, снабжения сжатым воздухом на предприятиях, газоснабжения и других.
Известен регулятор, содержащий корпус с входной и выходной полостями, регулирующий орган, включающий седло и запорный элемент, связанный с подпружиненным чувствительным элементом, образующий с корпусом полость управления, сообщенную с выходной полостью, задающую полость с расположенной в ней пружиной чувствительного элемента (патент N 2047214, МПК G 05 D 16/06, Бюллетень N 30, 1995 г.)
Недостатками этой конструкции являются ее усложнение и увеличение габаритов за счет введения компенсирующих пружин с двуплечим рычагом, используемых для повышения точности поддержания выходного давления в широком диапазоне изменения расхода при постоянном входном давлении и применения чувствительного элемента в виде мембран, которая снижает надежность регулятора.
Кроме того, точность регулирования снижают нелинейные связи компенсирующих пружин с запорным элементом и пружиной задания, обусловленные изменением расстояния от оси вращения рычага до плоскости осей компенсирующих пружин и изменения угла действия силы компенсирующих пружин на чувствительный элемент.
Также при случайных повышениях входного давления из-за нарушения связи между рычагом и чувствительным элементом, вызванной несогласованным изменением сил, действующих на запорный элемент от входного и чувствительный от выходного давлений, в регуляторе могут возникать автоколебания.
Указанные недостатки отсутствуют в регуляторе давления, являющимся наиболее близким по технической сущности к предлагаемому решению (з. N 95111995, МПК G 05 D 16/06, Бюллетень, N 9, 1996 г.)
Регулятор содержит корпус с входной и выходной полостями, между которыми расположен регулирующий орган, выполненный в виде седла с перфорированной стенкой в выходной полости и запорного элемента, расположенного со стороны входной полости, чувствительный элемент, выполненный в виде стакана, расположенного с пружиной в задающей полости, связанного через шток с запорным элементом и подпружиненного пружиной относительно крышки, образующей с корпусом резьбовую пару, полость управления, соединенную с выходной полостью и герметично разделенную от задающей полости.
Недостатком этого регулятора является то, что, имея на номинальном расходе в широком диапазоне изменения входного давления высокую точность, последняя снижается при изменении расхода в широком диапазоне при постоянном входном давлении.
Целью изобретения является повышение точности поддержания выходного давления в широком диапазоне изменения расхода и расширение функциональных возможностей.
Для достижения этой цели в известном регуляторе давления, содержащем корпус с входной и выходной полостями, между которыми расположен регулирующий орган, выполненный в виде седла с перфорированной стенкой в выходной полости и запорного элемента, расположенного со стороны входной полости, чувствительный элемент, выполненный в виде стакана, расположенного с пружиной в задающей полости, связанного через шток с запорным элементом и подпружиненного пружиной относительно крышки, образующей с корпусом резьбовую пару, полость управления, соединенную с выходной полостью и герметично разделенную от задающей полости, согласно изобретению между запорным элементом и штоком введен компенсатор жесткости упругих элементов, который выполнен как целое с запорным элементом и/или со штоком в виде усеченного тела вращения, образующая которого выполнена по определенной линии.
Кроме того, введена тяга, образующая с крышкой резьбовую пару, с возможностью обеспечения связи посредством втулки с концом пружины со стороны чувствительного элемента, полости управления и задающая герметично разделены мембраной, закрепленной периферийной частью в корпусе, а центральной частью на чувствительном элементе, полости управления и выходная соединены каналами, выполненными в корпусе, усеченное тело вращения может быть выполнено в виде усеченного параболоида вращения, образующая которого может быть аппроксимирована отрезком прямой.
Введение компенсатора жесткости упругих элементов в виде усеченного тела вращения, переменные составляющие площадей сечений которого связаны определенной зависимостью через рабочий ход, разность входного и выходного давлений с суммарной жесткостью упругих элементов, влияющих на точность регулирования, позволяет повысить точность поддержания давления на выходе в широком диапазоне изменения расхода и реализовать заданную зависимость изменения выходного давления от расхода и/или входного давления за счет компенсации или корректировки переменной составляющей силы упругих элементов, обусловленной их жесткостью переменной силой от воздействия постоянной или переменной разности входного и выходного давлений на расположенную в сечении седла переменную составляющую эффективную площадь сечения компенсатора жесткости, образующая которого выполнена по определенной методом аналитической геометрии или аппроксимированной линии.
Обеспечение возможности связи конца пружины со стороны чувствительного элемента посредством втулки с тягой, образующей с крышкой резьбовую пару, позволяет сохранить в регуляторе функции запорного вентиля без нарушения его настройки.
Вариант герметичного разделения полостей управления и задающий мембраной приведен как один из оптимальных для обеспечения низкого трения чувствительного элемента.
Соединение полостей управления и выходной каналами, выполненными в корпусе, исключает влияние разборок и сборок регулятора на точность, обусловленное возможностью изменения положения каналов после сборки.
Выполнение компенсатора жесткости в виде усеченного параболоида вращения позволяет получить постоянное давление на выходе с особо высокой точностью во всем диапазоне изменения расхода за счет полной компенсации переменной составляющей силы упругих элементов.
Аппроксимация образующей усеченного параболоида вращения отрезком прямой осуществлена с целью повышения технологичности компенсатора жесткости в случае обеспечения заданный требований к точности.
На чертеже показан пример выполнения регулятора давления.
Регулятор давления содержит корпус 1 с входной полостью 2 и выходной 3, соединенной каналами 4 с полостью управления 5, герметично разделенную от соединенной с атмосферой задающей полости 6 мембранной 7, которая периферийной частью закреплена в корпусе 1, а центральной частью на расположенном в задающей полости 6 чувствительном элементе 8, выполненным в виде стакана и подпружиненным пружиной 9 относительно крышки 10, образующей с корпусом 1 резьбовую пару, регулирующий орган, выполненный в виде седла 11 с перфорированной стенкой в выходной полости 3 и запорного элемента 12, расположенного со стороны входной полости 2 и связанного штоком 13 с чувствительным элементом 8.
Кроме этого, регулятор содержит компенсатор жесткости 14 пружины 9 и мембраны 7, который расположен между запорным элементом 12 и штоком 13, выполнен как целое с запорным элементом 12 в виде усеченного параболоида вращения, образующая 15 которого аппроксимирована отрезком прямой.
Через втулку 16 обеспечивается возможность связи конца пружины 9 со стороны чувствительного элемента 8 с тягой 17, образующей с крышкой резьбовую пару.
Регулятор давления работает следующим образом.
Для регулятора характерны два основных режима работы - динамический и статический.
В динамическом режиме выходное давление автоматически поддерживается постоянным при заданном входном давлении в широком диапазоне изменения расхода путем уравновешивания силы пружины 9 (для упрощения здесь и далее параметры мембраны 7 учетным в пружине 9) с одной стороны и с другой - сил от воздействия выходного давления на результирующую эффективную площадь чувствительного элемента 8 и компенсатора жесткости 14 и входного давления на эффективную площадь запорного элемента 12, равную площади сечения компенсатора жесткости 14, находящегося в сечении седла 11.
Математически с учетом преобразований с целью выделения постоянных, обуславливающих величину поддерживаемого давления на выходе, и переменных, влияющих на точность поддержания давления на выходе, составляющих сил это можно записать выражением:
Fo + Zh = PвыхSr + Pвх • Sko + (Pвх - Pвых) • (Sк - Sko) (1)
где
Fo - сила сжатия пружины на номинальном расходе (постоянная составляющая сила пружины);
Z - жесткость пружины;
n - рабочий ход пружины;
Zh - переменная составляющая сила пружины;
Pвых - выходное давление;
Sr - эффективная площадь чувствительного элемента;
Pвх - выходное давление;
Sko - эффективная площадь сечения компенсатора жесткости на номинальном расходе (постоянная составляющая площадь сечения компенсатора жесткости);
Sк - площадь сечений компенсатора жесткости;
(Sk-Sko) - переменная составляющая площадь сечений компенсатора жесткости.
Одинаковые знаки перед силами в правой части выражения (1) свидетельствуют о совпадении направления действий этих сил, что характеризует высокую устойчивость работы регулятора.
Достаточным условием поддерживания на выходе постоянного давления в широком диапазоне изменения расхода являются равенства постоянных и переменных составляющих сил в левой и правой частях выражения (1)
Fo = PвыхSr + PвхSko; (2)
Zh = (Pвх - Pвых) (Sk - Sko). (3)
Из (2) поддерживаемое давление на выходе равно:
Pвых = Fo - RвхSko / Sr = const
Учитывая, что
Sк=nR2,
где
R - радиус сечений компенсатора жесткости, выражение (3) можно преобразовать в следующее:
R2 = Z/П(Rвх-Pвыхh + Sko/П
Это выражение идентично уравнению параболы, одна из частей ветви которой является образующей 15 усеченного параболоида компенсатора жесткости 14, причем в пределах полного рабочего хода пружины 9 площадь сечений усеченного параболоида вращения изменяется от Sko на номинальном расходе до площади сечения седла 11, соответствующего моменту закрытия регулирующего органа запорным элементом 12.
С целью повышения технологичности компенсатора жесткости 14 в случае обеспечения заданных требований к точности образующая 15 усеченного параболоида вращения аппроксимируется отрезком прямой.
При закрытии сети после регулятора из-за возможного неполного гашения динамического давления P2 потока за счет увеличения объема полости управления 5 (например, в случае резкого закрытия сети) давления на выходе после закрытия устанавливается в пределах
Fo - RвхSko/Sr ≤ Pвых < Fo - PвхSko/Sr + Pд
Надежность открытия регулирующего органа при переходе из статического режима в динамический обеспечивается выбором характеристики пружины 9 из условия
Fo > PвхSko.
В экстремальных случаях регулятор может быть переведен в состояние закрытого регулирующего органа путем снятия давления пружины 9 на чувствительный элемент 8 с помощью тяги 17. При этом под действием входного и выходного давлений соответственно на запорный 12 и чувствительный 8 элементы регулирующий орган закрывается и остается в закрытом состоянии после полного падения давления на выходе до нуля за счет воздействия входного давления на максимальную эффективную площадь запорного элемента 12, равную площади сечения седла 11. При возврате пружины в первоначальное положение регулятор переходит в один из основных режимов работы с первоначальной настройкой.
Настройка регулятора на заданное давление производится на любом или номинальном (для аппроксимированной образующей 15) расходе с помощью крышки 10, путем создания определенной силы, воздействующей на чувствительный элемент 8 со стороны пружины 9.
Предлагаемая конструкция наряду с распространенными регуляторами, предназначенными для стабилизации выходного давления, позволяет реализовать с высокой точностью заданную зависимость изменения выходного давления от расхода и/или входного давления за счет корректировки переменной составляющей силы пружины 9 переменной силой от воздействия переменной разности входного и выходного давлений на переменную составляющую площадь сечения компенсатора жесткости 14, образующая 15 которого выполнена по определенной в соответствии с заданной зависимостью линии.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР ДАВЛЕНИЯ | 1997 |
|
RU2121704C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 2003 |
|
RU2237919C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 2003 |
|
RU2242788C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 2011 |
|
RU2490689C2 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 2011 |
|
RU2486572C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 1995 |
|
RU2096819C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 1995 |
|
RU2117980C1 |
| ЗАПОРНО-РЕГУЛИРУЮЩИЙ ОДНОСЕДЕЛЬНЫЙ КЛАПАН | 1997 |
|
RU2116538C1 |
| САТУРАТОР И РЕГУЛЯТОР ДАВЛЕНИЯ ДЛЯ НЕГО | 2000 |
|
RU2163081C1 |
| АВТОМАТИЧЕСКИЙ ВОЗДУШНЫЙ КЛАПАН | 2002 |
|
RU2227855C2 |
Изобретение относится к технике автоматического регулирования и может использоваться в системах водоснабжения, газоснабжения, снабжения сжатым воздухом на предприятиях и других. Техническим результатом является повышение точности поддержания выходного давления в широком диапазоне изменения расхода и расширение функциональных возможностей. Регулятор давления содержит корпус, входную и выходную полости, полость управления, чувствительный элемент в виде стакана, связанного штоком с запорным элементом, седло, задающую полость с расположенной в ней пружиной чувствительного элемента. Результат достигается введением между запорным элементом и штоком компенсатора жесткости упругих элементов в виде тела вращения с образующей, выполненной по определенной линии, что позволяет компенсировать или корректировать переменную составляющую силу упругих элементов, влияющую на выходные характеристики регулятора. 3 з.п. ф-лы, 1 ил.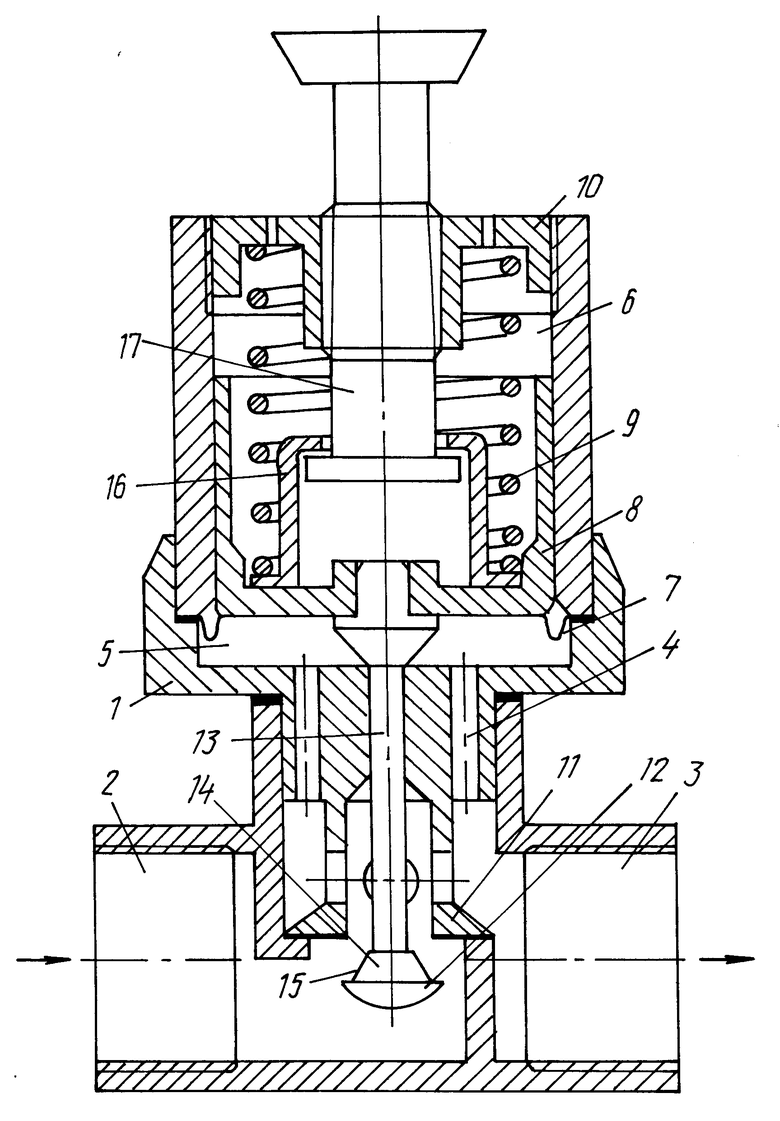
| RU 95111995 A1, 20.03.96 | |||
| RU 95111994 A1, 27.03.96 | |||
| РЕГУЛЯТОР ДАВЛЕНИЯ | 1994 |
|
RU2047214C1 |
| РЕГУЛИРУЮЩИЙ ОРГАН | 0 |
|
SU398800A1 |
| Регулятор давления | 1974 |
|
SU598035A1 |
| Регулятор давления газа | 1978 |
|
SU767718A1 |

