Изобретение относится к сельскому хозяйству, а именно к средствам автоматизации процессов в сооружениях защищенного грунта.
Известен робототехнический комплекс, включающий мостовой агрегат, на котором установлены средства обработки почвы и/или растений [1]. В данном случае агрегат передвигается по направляющим, расположенным внутри теплицы, и в процессе перемещения осуществляется обработка растений или почвы. Недостатком такого комплекса является его низкая производительность, недостаточная степень автоматизации процессов в теплице и обязательное наличие рельсового пути, что затрудняет выращивание ряда высокорослых культур.
Также известен робототехнический комплекс, включающий основной и дополнительные транспортные модули, которые перемещаются по проходам теплицы и с которых осуществляется обработка растений [2]. В данном случае обработка осуществляется за счет наличия на дополнительном модуле необходимых технических средств, устанавливаемых каждый раз вручную. Недостатком в данном случае также является низкая производительность комплекса, возникающая вследствие сложностей в переоборудовании модулей необходимыми сопутствующими средствами, необходимыми для последующей операции обработки.
Наиболее близким к заявленному является роботехнический комплекс для сооружений защищенного грунта, включающий по крайней мере один базовый транспортный модуль с по крайней мере одним междурядным транспортно-энергетическим модулем, на котором установлено по крайней мере средство для обработки растений, причем базовый транспортный модуль имеет систему управления [3]. В данном случае базовый модуль перемещает междурядный модуль на требуемый ряд по центральной дорожке, после чего междурядный модуль, перемещаясь по ряду, осуществляет обработку растений. Однако в данном случае перемещение междурядного модуля осуществляется пошагово в зависимости от постоянного расстояния между растениями, посаженными квадратно-гнездовым способом. Кроме того, осуществляется обработка только растений без обработки почвы около него. Другим недостатком данного комплекса является сложность в управлении междурядным модулем, который управляется, как и базовый модуль, от единой системы управления, причем управление осуществляется в приводном варианте. Комплекс также имеет низкие производственные показатели вследствие необходимости ручной замены органов обработки растений.
Технической задачей настоящего изобретения является повышение производительности комплекса, улучшение его эксплуатационных характеристик и уменьшение доли ручного труда.
Указанная задача решается тем, что междурядный транспортно-энергетический модуль снабжен автономным блоком управления, связанным с системой управления, и системой определения состояния растения и/или его по крайней мере одного плода, причем последняя и соответствующие входы/выходы средства для обработки растений связаны с соответствующими входами/выходами автономного блока управления.
А также тем, что он снабжен по крайней мере одним средством для обработки почвы.
И, кроме того, тем, что он снабжен по крайней мере одним средством для воздействия на внешнюю среду в зоне расположения по крайней мере одного растения.
Причем базовый транспортный модуль может быть снабжен средствами для выполнения технологический операций, а средство для обработки растений, средство для обработки почвы, средство для воздействия на внешнюю среду и средство для выполнения технологических операций установлены с возможностью автоматического перемещения с базового транспортного модуля на транспортно-энергетический модуль и обратно.
Поиск, проведенный по патентной и технической литературе, показал, что заявленная совокупность неизвестна, т.е. она соответствует условию патентоспособности изобретения "новизна". Поскольку заявленное техническое решение имеет спрос и создано из известных технических блоков, то оно соответствует условию "промышленная применимость". А так как реализация поставленной технической задачей происходит неочевидным для специалиста образом, то изобретение соответствует условию "изобретательский уровень".
На чертеже схематически представлен робототехнический комплекс для сооружений защищенного грунта.
Робототехнический комплекс включает базовый транспортный модуль 1, который перемещается в центральном проходе 2 сооружения закрытого грунта, например теплицы. Модуль 1 в частном случае представляет собой шестиколесное шасси с раздельным электроприводом на каждое колесо, причем питание модуля 1 может осуществляться либо по кабелю, который сматывается или наматывается на соответствующий барабан 3, либо питание может осуществляться по специальным токосъемникам, которые контактируют с соответствующими шинами, проложенный вдоль прохода 2, либо быть автономным. Комплекс также включает по крайней мере один междурядный транспортно-энергетический модуль 4, который может перемещаться только вдоль рядка растений и посредством трапного устройства 5 может заезжать на модуль 1. Междурядный модуль 4 снабжен по крайней мере одним средством для обработки растений 6 и средством для обработки почвы 7, которые установлены с возможностью перемещения на модуль 1 и обратно, при этом в зависимости от требуемой операции на модуль 4 устанавливается необходимое средство 6 и/или 7. Комплекс также может иметь по крайней мере одно средство 8 для воздействия на внешнюю среду в зоне расположения растения, по крайней мере одно средство 9 для выполнения технологических операций и систему 10 определения состояния растения и/или его по крайней мере одного плода или плодов, которые также могут быть установлены либо на модуле 1, либо на модуле 4. При этом базовый модуль имеет систему управления 11, а модуль 4 - автономный блок управления 12, которые могут быть связаны телеметрически. Средство 6 может быть выполнено в виде обрезчика побегов, ультразвукового или светового облучателя и т. д., средство 7 может быть выполнено в виде приводного рыхлителя, средство 8 - в виде локального ультрамалообъемного опрыскивателя, средство 9 - в виде общего опрыскивателя, автоматического устанавливателя шпалер, облучателя системы рядков и т.д. Система 10 может быть выполнена в виде системы регистрации емкостных параметров растения и/или плода или плодов, по величине которых судят как о состоянии растения, так и о состоянии плода или плодов. Система управления 11 может быть выполнена на микропроцессорах с программным управлением и быть связанной с центральной системой управления (не показана) всеми модулями 1 и 4 в сооружении закрытого грунта или группы сооружений, автономный блок управления 12 выполняется меньшей мощностью, поскольку сигналы управления ему поступают с системы 11, располагающейся поблизости.
Робототехнический комплекс работает следующим образом. По заранее заданной программе базовый транспортный модуль 1 перемещается к нужному номеру рядка, который определяется по соответствующей метке, расположенной около него и считываемой системой 11. В момент остановки модуля 1 по трапному устройству с него съезжает междурядный модуль 4, на котором расположены необходимые по данному технологическому циклу средства 6 - 9 и/или система 10. При перемещении модуля 4 вдоль рядка растений система 10 по изменению параметров емкости осуществляет как идентификацию наличия растения в целом, так и определяет состояние растения и/или по крайней мере одного его плода, после чего по заданной программе включаются в работу средства 6 - 9, т.е. осуществляется либо обработка почвы в корневой зоне растения, либо обрабатывается само растение, например облучается или опыляется, осуществляется воздействие на внешнюю среду около растения, происходит локальное увлажнение, химическое опрыскивание и т.д., осуществляется установка шпалер, подъем светильников и другие технологические операции. Причем модуль 4 проходит весь рядок, после чего перемещается назад и модуль 1 далее перемещает модуль 4 на следующий программно заданный рядок. При этом на модуль 4 автоматически устанавливаются необходимые средства 6 - 9, требуемые для выполнения заданных операций для растений этого рядка, после чего работа повторяется на следующем рядке растений до конца теплицы. Система управления 11 передает сигналы на блок управления 12, причем блок 12 также может быть выполнен на микропроцессорах и может как сам оценивать информацию от системы 10 для управления средствами 6 - 9, так и передавать ее в систему управления 11, где она преобразуется и проанализируется и далее передается обратно в блок 12 для управления средствами 6 - 9. Информация может корректироваться посредством центральной системы управления, которая связана с системой 11. Этим достигается максимальная эффективность систем управления и помехоустойчивость, т. к. центральная система имеет максимальную мощность, система 11 - меньшую, а блок 12 - наименьшую, и радиусы их действия соответственно уменьшаются.
Таким образом, робототехнический комплекс может быть высокоэффективно применен при выращивании различного рода растений, что затруднительно при применении других технических решений и в большинстве случаев затрудняет использование людей без соответствующих защитных средств. Комплекс может быть применен также для полностью автоматического управления процессом выращивания растений в сооружении закрытого грунта, что может иметь место, например, в замкнутых объемах-космических станциях, зимовках, буровых вышках в море, подводных станциях и т.д.
Источники информации:
1. Авторское свидетельство СССР N 1657083, кл. A 01 B 49/00, 1991.
2. Микая Б.Л., Чичев Ю.И. Искусственное поле. - М.: Колос, 1983.
3. Липов Ю. Н. Научные основы расчета комплекса машин для защищенного грунта. - М.: ВИСХОМ, 1994, с. 198 - 201.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ТЕПЛИЦА | 1995 |
|
RU2122315C1 |
| УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ САЛАТНОГО ЦИКОРИЯ | 1995 |
|
RU2121788C1 |
| Способ опыления растений | 1990 |
|
SU1801318A1 |
| Способ уборки плодов шпалерных культур | 1981 |
|
SU990122A2 |
| Машина для уборки тепличных растительных остатков шпалерных овощных культур | 1986 |
|
SU1419573A1 |
| УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ ГРИБОВ | 1994 |
|
RU2048740C1 |
| УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ | 1992 |
|
RU2028756C1 |
| Устройство для управления температурным режимом в теплице | 2018 |
|
RU2710010C2 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ ПЕРЦА СЛАДКОГО, ПРЕИМУЩЕСТВЕННО В СИСТЕМЕ КАПЕЛЬНОГО ОРОШЕНИЯ | 2009 |
|
RU2415534C2 |
| МОСТОВОЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПРЕЦИЗИОННОГО ЗЕМЛЕДЕЛИЯ | 2020 |
|
RU2754999C1 |
Комплекс включает по крайней мере один базовый транспортный модуль с по крайней мере одним междурядным транспортно-энергетическим модулем, на котором установлено по крайней мере одно средство для обработки растений. Базовый транспортный модуль имеет систему управления. При этом междурядный транспортно-энергетический модуль снабжен автономным блоком управления, связанным с системой управления, и системой определения состояния растения и/или его по крайней мере одного плода или плодов. Комплекс, кроме того, снабжен по крайней мере одним средством для обработки почвы и по крайней мере одним средством для воздействия на внешнюю среду в зоне расположения по крайней мере одного растения. В процессе работы комплекса повышение производительности, улучшение его эксплуатационных характеристик и уменьшение доли ручного труда достигается за счет наличия вышеперечисленных средств и автоматической системы управления. 4 з.п. ф-лы, 1 ил.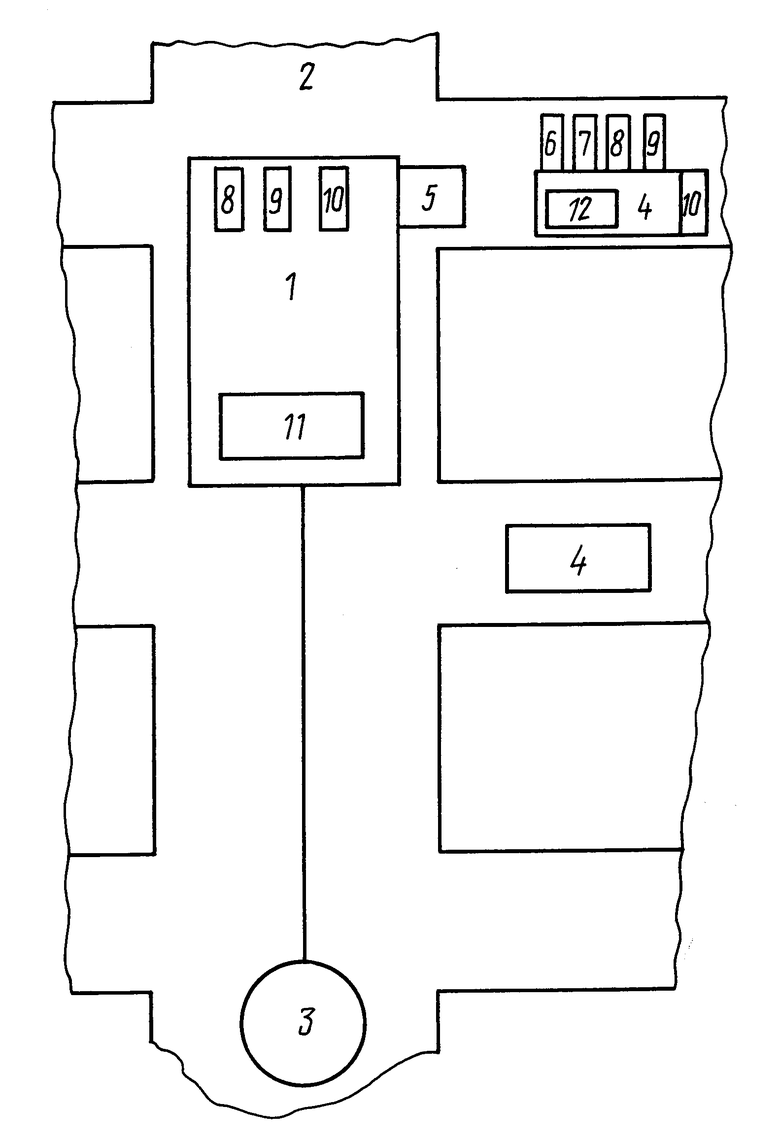
| Липов Ю.Н | |||
| Научные основы расчета комплексов машин для защищенного грунта | |||
| - М,: ВИСХОМ, 1994, с.198-201 | |||
| Микая Б.Л., Чичев Ю.И | |||
| Искусственное поле | |||
| - М.: Колос, 1983 | |||
| ТЕПЛИЧНАЯ АГРОСИСТЕМА | 1993 |
|
RU2050087C1 |
| Гельфенбейн С.П | |||
| Терранавигация | |||
| - М.: Колос, 1981, с.98-101 | |||
| Ведерников В.В | |||
| и др | |||
| Микропроцессоры в сельском хозяйстве, сборник обзоров "Зарубежная электронная техника", N 6, 1984, ЦНИИ "Электроника", с.3-16 | |||
| Прищеп Л.Г | |||
| Эффективная электрификация защищенного грунта | |||
| - М.: Колос, 1980, с.107-109. | |||
