Изобретение относится к машиностроению. Область применения - преимущественно для производства двигателей и холодильных машин, работающих по циклу Стирлинга.
Известен кривошипно-кулисный механизм, содержащий кривошип, входящую с ним в кинематическую связь кулису, прикрепленную к штоку.
Недостатком указанного механизма является его ненадежность и то, что он плохо поддается балансировке, имеет большие габариты (Г. Ридер, И. Хупер. "Двигатели Стирлинга". М., Мир, 1986 г., стр. 35, рис. 1.27д).
Наиболее близким к предлагаемому техническому решению является зубчато-рычажный механизм челнока, состоящий из трех конических зубчатых колес, входящих в зацепление друг с другом, два из которых движутся в противоположных направлениях с равными угловыми скоростями, при этом центр челнока, который поворачивается вокруг штока, соединен с колесами сферическими шарнирами и совершает возвратно-поступательное движение вместе со штоком. Недостатком указанного механизма является то, что его нельзя применять в двигателях Стирлинга простого действия с поршнем-вытеснителем β-модификации.
(И. И. Артоболевский "Механизмы в современной технике" т. IV, "Зубчатые механизмы". Москва, Наука, 1980 год, стр. 238, N 2409)
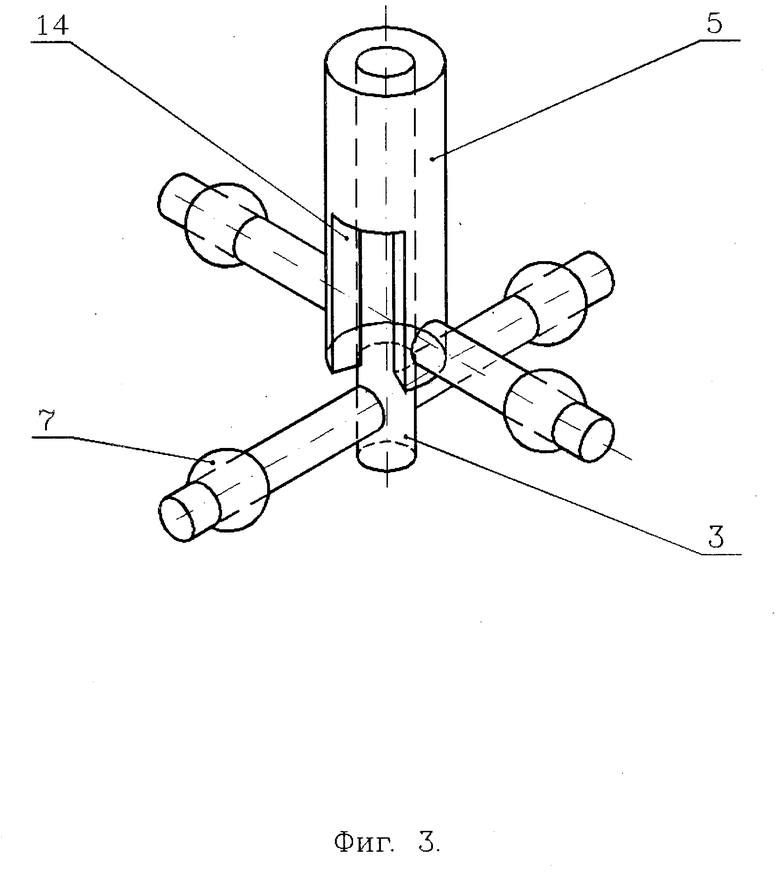
Для устранения указанных недостатков предложен механизм привода, выполненный в виде четырех конических зубчатых колес, причем введенное четвертое коническое зубчатое колесо, входит в зацепление с другими колесами, образуя таким образом кинематически замкнутую систему, причем это зубчатое колесо и противоположное колесо снабжены сферическими кривошипами, в которые установлен второй челнок, присоединенный к штоку вытеснителя, соосно размещенному в штоке рабочего поршня, который в свою очередь присоединен к первому челноку, установленному со смещением на заданный фазовый угол относительно второго челнока, а для избежания пересечения челноков в процессе работы по крайней мере один из них выполнен U-образно. Для упрощения конструкции челноки могут быть выполнены в виде пальцев и прикреплены жестко к штокам, а в штоке рабочего поршня должны быть выполнены проточки для избежания пересечения челноков в процессе работы.
Изобретение поясняется фиг. 1 - 3.
На фиг. 1 изображен механизм привода. Он содержит корпус (1), вытеснитель (2), шток вытеснителя (3), рабочий поршень (4), шток рабочего поршня (5), конические зубчатые колеса (6), образующие кинематически замкнутую систему, причем каждое из колес снабжено сферическим кривошипом (7) и балансировочным противовесом (8), в соответствующие кривошипы вставлены челноки (9, 10), один из челноков (9) присоединен к штоку рабочего поршня (5), другой челнок (10) - к штоку вытеснителя (3). Челноки закреплены на штоках посредством цилиндрических шарниров (11, 12), одно из колес присоединено к рабочему валу (13). На фиг. 3 приведен вариант выполнения челноков в виде пальцев, для упрощения конструкции они жестко прикреплены к штокам, а для избежания пересечения челноков в процессе работы в наружном штоке выполнены проточки 14.
Описание работы механизма привода.
Рассмотрим работу механизма привода, например для холодильных машин.
При вращении рабочего вала (13) приходят во вращение все четыре конических зубчатых колеса (6), так как они кинематически связаны между собой, при этом противоположные колеса вращаются в противоположные стороны относительно друг друга. Челноки (9, 10), симметрично вставленные в соответствующие сферические кривошипы (7) и понуждаемые колесами, приходят в возвратно-поступательное движение вдоль оси и колебательное движение вокруг оси штоков (3, 5) и через штоки передают движение рабочему и вытеснительному поршням. При этом фаза рабочего поршня будет отличаться от фазы поршня вытеснителя на угол α.
Поскольку механизм привода является кинематически обратимым, то в случае применения его для двигателя, он будет побуждаться к действию не от рабочего вала (13), а от рабочего поршня (4), а так как каждая пара кривошипов сдвинута на заданный фазовый угол α, то соответственно и возвратно-поступательное движение рабочего поршня (4) будет отставать по фазе на величину α от движения вытеснителя (2). В случае применения цилиндрических шарниров (11, 12) штоки рабочего поршня (5) и вытеснителя (3) будут совершать только возвратно-поступательное движение, в отличие от челноков (9, 10), которые будут совершать как поступательное, так и колебательное движение вокруг оси штоков. В том случае, когда челноки выполнены в виде пальцев, жестко прикрепленных к штокам (см. фиг. 3), штоки будут совершать не только возвратно-поступательное движение, но и колебательное движение вокруг оси штоков.
В процессе эксплуатации, при необходимости, фазовый угол α может быть легко изменен при разборке механизма и установке соответствующих пар кривошипов на новый заданный угол с дискретностью, равной углу, определяемому модулем зацепления зубчатых колес.

Механизм предназначен для использования в машиностроении, преимущественно при производстве двигателей и холодильных машин, работающих по циклу Стирлинга. Механизм привода выполнен в виде четырех конических шестерен, находящихся в зацеплении друг с другом и образующих кинематически замкнутую систему, каждая из шестерен снабжена сферическим кривошипом и балансировочным противовесом, в соответствующие кривошипы вставлены челноки, один из которых присоединен к штоку поршня, второй - к штоку вытеснителя, закреплены челноки на штоках посредством цилиндрических шарниров. Каждая пара кривошипов сдвинута на заданный угол α, поэтому возвратно-поступательное движение рабочего поршня будет отставать по фазе на величину α от движения вытеснителя. Изобретение обеспечивает улучшение балансировки, уменьшение габаритов и упрощение регулирования за счет возможности изменения фазового угла в процессе эксплуатации. 1 з.п. ф-лы, 3 ил.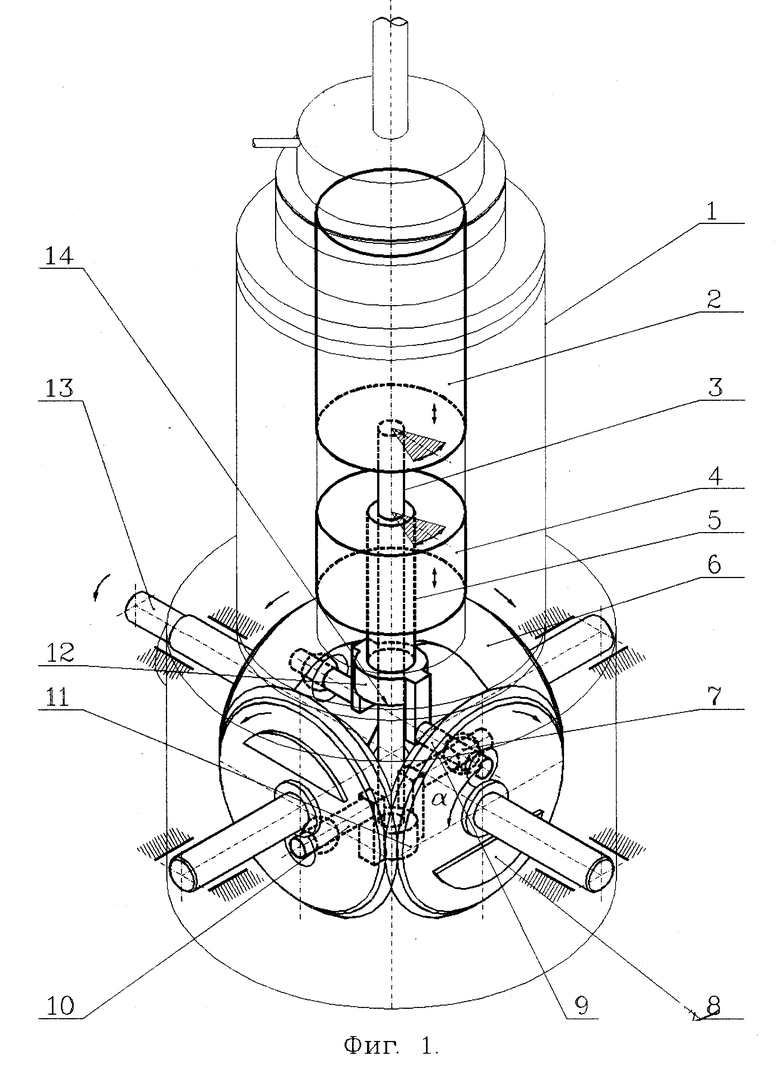
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ридер Г., Хупер И | |||
| Двигатели Стирлинга | |||
| - М.: Мир, 1986, с.35, рис.1.27 д | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| т.IV | |||
| Зубчатые механизмы | |||
| - М.: Наука, 1980, с.238, N 2409. | |||
