Область техники
Изобретение относится к области часовой промышленности и может быть использовано при производстве механических наручных часов с автоматическим приводом с возможностью получения энергии движения от разности температур различных областей пространства относительно корпуса часов, в частности с возможностью получения энергии движения от разности температур у поверхности руки пользователя со стороны задней крышки корпуса часов и температуры воздуха со стороны циферблата и боковых сторон корпуса часов.
Уровень техники
Распространенные в настоящее время механические часы обычно содержат: пружинный двигатель на основе спиральной пружины; механизм завода и перевода стрелок (на языке часовщиков - ремонтуар); спусковой механизм (на языке часовщиков - спуск, ход), преобразующий непрерывное вращательное движение в колебательное или возвратно-поступательное движение; колебательную систему в виде маятника или балансира (баланса); систему зубчатых колес или шестеренок, соединяющую пружинный двигатель и спусковой механизм (на языке часовщиков - ангренаж); стрелочный механизм и циферблат [1].
Пружинный двигатель на основе спиральной пружины обычно представляет собой прикрепленную к валу спиральную пружину, размещенную в цилиндрическом барабане с зубчатым краем. Раскручиваясь вокруг оси, спиральная пружина вращает барабан (внутри которого она находится), а его зубчатый край через него - систему колес, спусковой механизм и регулятор приводит в движение стрелочный механизм. При заводке часов вращением заводной головки через зубчатые передачи вращают соединенный с пружиной вал, на который, сжимаясь, наматывается спиральная пружина [1].
Главным недостатком пружинного двигателя на основе спиральных пружин является неравномерность скорости раскручивания пружины, что приводит к неточности хода часов. Каждая спиральная пружина в ходе своего разматывания изменяет свою приводную силу. Для устранения этого недостатка применяли и применяют различные способы: исключение в работе пружины, ее начальную и конечную фазу, путем использования кулачковых механизмов, из которых наиболее известны мальтийский механизм, кольцевидные и пальцевые кулачковые механизмы.
Изменчивость приводной силы спиральной пружины ограничивают удлинением пружины и увеличением запаса ее энергии, обычно за счет ее толщины. Для тонких пружин требуются также специальные сплавы, лучше выдерживающие нагрузку и усталость [2].
Таким образом главным недостатком пружинного двигателя на основе спиральных пружин является неравномерность скорости раскручивания спиральной пружины, что приводит к неточности хода часов. Кроме этого, точность хода механических часов зависит еще от множества факторов, таких как температура, положение часов, износ деталей и других. Поэтому для механических часов считается нормой расхождение с точным временем на 15-45 секунд в сутки, а лучшим результатом - 4-5 секунд в сутки.
Главным недостатком пружинного двигателя на основе спиральных пружин является неравномерность скорости раскручивания пружины, что приводит к неточности хода часов. Каждая спиральная пружина в ходе своего разматывания изменяет свою приводную силу. Для устранения этого недостатка применяли и применяют различные способы: исключение в работе пружины, ее начальную и конечную фазу, путем использования кулачковыХ механизмОВ, из которых известны мальтийский механизм, кольцевидные и пальцевые кулачковые механизмы.
Изменчивость приводной силы можно также ограничивать удлинением пружины и увеличением запаса ее энергии. Однако удлинение пружины идет за счет ее толщины, что требует увеличения ее размеров, а для тонких пружин требуются специальные сплавы, лучше выдерживающие нагрузку и усталость [3], но они дороги и сложны в изготовлении.
Главным недостатком обычного пружинного двигателя на основе спиральных пружин является неравномерность скорости раскручивания спиральной пружины, что приводит к неточности хода часов. Кроме этого, у механических часов точность хода зависит еще от множества факторов, таких как температура, положение часов, износ деталей и других. Поэтому для механических часов считается нормой расхождение с точным временем на 15-45 секунд в сутки, а лучшим результатом - 4-5 секунд в сутки.
В настоящее время широко используются механические часы с автоматическим подзаводом пружины (с автоподзаводом). Часы с автоподзаводом более точны, так как энергия пружины в течение дня остается почти постоянной, что приводит к постоянной величине импульса, передаваемого на регулятор-баланс [4].
По своим конструктивным особенностям механизмы автоподзавода различаются, но все известные конструкции имеют инерционный сектор, или подвижный груз, который при вращении часов оборачивается или качается вокруг своей оси и посредством силы тяжести передает пружине двигателя дополнительную энергию. Инерционный сектор обычно имеет достаточно большой вес, для того чтобы преодолеть силу сопротивления заводной пружины, поэтому и его крепление к механизму часов должно быть достаточно прочным и надежным.
В известных часах с исправным автоподзаводом пружина должна подзаводиться при повороте инерционного сектора в любую сторону. Если пружина заводится только при повороте инерционного сектора в одну сторону, это приводит к тому, что пружина не полностью подзаводится и часы останавливаются. Сектор автоподзавода при этом вращается при любых движениях руки человека, независимо от того, насколько заведена пружина часов. Для того чтобы пружина не порвалась от чрезмерного перенапряжения, она обычно имеет фрикционное крепление к барабану, посредством которого, достигнув максимального значения, пружина проскальзывает в барабане на два-три оборота, что дает возможность автоподзаводу постоянно работать и избегать его поломки.
Часы с автоподзаводом обычно толще и тяжелее обычных часов за счет механизма автоподзавода, который обычно располагается над основным механизмом часов.
В часах отечественного производства Слава 2427, Восток 2416 в системе автоподзавода используются фрикционные и передаточные колеса, что требует много энергии на вращение этих колес при заводе пружины часов.
В часах импортного производства - Ориент, Сейко, Ситизен и других система автоподзавода состоит из эксцентрика, гребенки, бархатного колеса. Инерционный сектор, вращаясь, поворачивает эксцентрик, на ось которого надета гребенка, гребенка в свою очередь начинает поворачивать бархатное колесо, которое, взаимодействуя с барабанным колесом, заводит пружину. Причем независимо в какую сторону поворачивается сектор автоподзавода бархатное колесо должно крутиться только в одну сторону. Для вращения одного бархатного колеса требуется меньше энергии, поэтому коэффициент полезного действия такой конструкции автоподзавода больше [4].
Первые механические карманные часы с автоподзаводом появились в XVIII веке, а в 1931 году Rolex выпустил первые наручные автоматические часы. Но по-настоящему массовое их производство началось только через 20 лет. С тех пор, благодаря своему удобству, автоподзавод завоевал огромную популярность [5].
Источником энергии в механических часах обычно является спиральная пружина. В большинстве часов она заводится вручную: вращением головки через систему колес передается на вал барабана.
Часы с автоподзаводом обычно имеют закрепленный на оси металлический груз, обычно выполненный в форме сектора. Центр тяжести сектора смещен к краю, и при любых движениях руки он поворачивается вокруг оси, заводя через систему шестерен пружину часов. Чтобы сектор мог преодолеть сопротивление пружины и завести часы, он должен обладать большой инерцией. Поэтому сектор обычно изготавливают из двух частей: тонкой легкой верхней пластины и полукольца из тяжелого вольфрамового сплава. Диаметр сектора стараются сделать максимально возможным.
Считается, что для полного автоматического завода пружины часы с автоподзаводом необходимо носить с движениями около 8 часов.
Основное достоинство часов с автоподзаводом состоит в том, что их не надо ежедневно заводить. При этом сектор постоянно поддерживает пружину в напряженном состоянии, близком к полному заводу, что позволяет достичь лучшей точности. Второе преимущество связано с водонепроницаемостью. Втулка заводной головки - одно из самых уязвимых мест в часах в плане водозащиты. В часах с автоподзаводом выше водонепроницаемость, т.к. заводная головка почти не используется, а значит у влаги и грязи меньше шансов попасть внутрь.
Недостатками механизмов автоподзавода являются значительный вес, конструктивная сложность и повышенная вероятность поломок. Известные часы с автоподзаводом толще и тяжелее обычных. Потребность в секторе большого размера ограничивает применение автоподзавода в женских часах. Усложнение механизма и использование груза из довольно дорогого вольфрама увеличивает стоимость часов.
Известные часы с автоподзаводом очень чувствительны к ударам. Бывает, что при сильных ударах под тяжестью грузового сектора ломаются его опоры.
Сегодня большинство выпускаемых в мире механических часов снабжены автоподзаводом, исключения составляют лишь самые дешевые и самые дорогие модели.
В дешевых часах автоподзавод не применяется с целью снижения стоимости.
В сложных дорогих часах использование автоподзавода известных конструкций часто становится невозможным, так как большое количество функций, во-первых, делает механизм и без того слишком толстым и увеличивать толщину еще, добавив автоподзавод, уже неразумно. Во-вторых, эти функции для своей работы требуют большей энергии и мощной пружины, и груз автоподзавода уже не в состоянии ее завести.
Известны механизмы автоподзавода («автоматического» завода), в котором качающийся неуравновешенный груз (грузовой сектор) осуществляет закручивание (завод) пружины пружинного двигателя, в которых неуравновешенный груз (ротор) 4 жестко соединен с трибом и свободно движется на оси в обоих направлениях или в которых триб постоянно сцеплен с зубчатым колесом обгонной муфты. В зависимости от направления вращения грузового сектора зубчатое колесо получает вращение в одном и том же направлении и при этом происходит подкручивание пружины [6].]
Известен часовой механизм для наручных часов, который для расширения арсенала технических средств и упрощения технологии изготовления часового механизма наручных часов содержит кинематическую цепь, включающую по меньшей мере один ремень для передачи движений и/или моментов между по меньшей мере двумя шкивами, которые удерживаются на нижней пластине или мостиках шарикоподшипниками. Подзавод механизма осуществляется посредством линейно колеблющейся массы, подзаводящей четыре барабана через парный распределитель. Барабаны не параллельны друг другу. Задняя крышка покрыта наклонными стеклами, позволяющими видеть барабаны, линейно колеблющуюся массу и, по меньшей мере, определенные шкивы. Регулирующий орган является съемным [7].
Известен автоподзавод пружинного двигателя наручных часов, содержащий центрально расположенный грузовой сектор с инерционным грузом и редуктор, отличающийся тем, что с целью упрощения конструкции и повышения его надежности редуктор снабжен пружинящей консолью круглого сечения, расположенной перпендикулярно оси грузового сектора и взаимодействующей свободным концом с храповым колесом, имеющим торцевые зубья и установленным на одной из осей редуктора, а средней частью, несущей камень с импульсной поверхностью, - со звездочкой, закрепленной на грузовом секторе и имеющей общую ось вращения [8].
Известны наручные часы, содержащие автоматический самоподзавод с асимметрично расположенным грузом и хронографный механизм, отличающиеся тем, что с целью повышения удобства в монтаже и ремонте в них хронографный механизм собран на отдельных платах и закреплен на платине часового механизма с помощью упоров, расположенных по всей высоте часового механизма [9].
Известен механизм подзавода наручных часов, содержащий центральный инерционный груз и планетарный редуктор, в котором для повышения надежности и уменьшения габаритов планетарный редуктор установлен на инерционном грузе и выполнен в виде центральных подвижного и неподвижного колес и двух сателлитов, каждый из которых состоит из двух соосных колес с числом зубьев, отличающимся по крайней мере на один, связанных разнонаправленными обгонными муфтами, причем колеса сателлитов, имеющие большее число зубьев, установлены с возможностью взаимодействия одного из них с подвижным центральным колесом, а другого - с неподвижным центральным колесом [10].
Известен механизм автоподзавода в виде инерционной массы, перемещающейся при изменении часов, отличающийся тем, что с целью возможности использования автоподзавода в сочетании с любым базовым элементом без его утолщения применено тяжелое полукольцо, размещенное по периметру механизма внутри корпусного кольца и удерживаемое в названном кольце с помощью трех роликов. При этом для передачи вращения груза на заводной вал пружины инерционный груз снабжен кольцом, внутренняя поверхность которого выполнена рифленой для взаимодействия с роликом, установленным на конце рычага, снабженного собачкой для перемещения храповика на заводном валу [11].
Известные механизмы автоподзавода могут быть использованы только в переносных часах, в которых по условиям эксплуатации возможно возникновение качательного движениЯ ротора.
Основным недостаткоМ всех известных механических часов с автоподзаводом для правильной работы механизма автоподзавода является необходимость активного подвижного образа жизни пользователя часов.
Как показывает практика, для работников сидячих профессий часы с автоподзаводом до конца не выполняют своей функции и автоподзавод часов у таких пользователей работает неэффективно. Поэтому разрабатываются часы с возможностью подзавода не от энергии механических движений, а от иных источников энергии.
Известны настольные часы Атмос с крутильным маятником, выпускаемые фирмой «Jaeger-leCoultre» (Швейцария) и работающие от изменения во времени температуры и атмосферного давления [12].
Источником энергии, поддерживающим колебания маятника в данных часах, служит перепад температуры окружающей среы воздуха в квартире или служебном помещении. Перепад температур в 1° обеспечивает функционирование часов в течение 2 суток. Часы функционируют с высокой степенью точности порядка 1 с в сутки. При отсутствии колебаний температуры окружающего воздуха в течение 2 суток (что мало вероятно) часы автономно функционируют в течение 100 суток за счет запаса энергии заводной пружины, заключенной в барабане.
Колебания температуры служат энергией подзавода пружины, которая работает в коротком интервале пологой кривой момента, обеспечивая тем самым высокую стабильность амплитуды колебаний и высокую степень точности хода.
Для использования колебания температуры воздуха на подзавод пружины используют особое химическое вещество C2H5Cl - хлористый этил. Пары хлористого этила создают давление, равное примерно атмосферному при температуре +12°C, при температуре +27°C давление паров максимальное, т.е. часы работают в широком диапазоне температур.
Хлористый этил помещают в герметический металлический корпус, имеющий форму короткого цилиндра. Хлористый этил заполняет внутренние кольцевые выступы в корпусе. При повышении температуры пары этила расширяются и давят на кольцевые выступы. Последние расширяются подобно мехам. Движение кольцевых выступов передается цепочке, которая одним концом прикреплена к пружине, а другим - к храповому устройству, осуществляющему непосредственно подзавод пружины в барабане.
При понижении температуры происходит сжатие кольцевых выступов. За счет разности температур и перемещения в ту или другую сторону кольцевых выступов, а вместе с ними пружины и цепочки, происходит подзавод пружины в барабане.
Для регулирования периода колебания маятника имеется головка, полный оборот которой соответствует изменению периода колебаний на 10 с в сутки. Часы регулируются с точностью 1 с в сутки. Часы работают только в стационарном положении, чувствительны к вибрациям. Они снабжены водяным уровнем и тремя установочными стойками, из которых одна неподвижна, а две другие регулируются по высоте. Для переноски часов маятник блокируется специальным устройством.
Недостатком этих часов является то, что эти часы работают только в стационарном положении, т.к. не допускается использование часов в качестве переносных. Так как энергия, получаемая от изменения давления и температуры, по времени очень мала, то в результате очень большого периода колебаний - под влиянием внешних воздействий - как правило они имеют очень сложную систему регулировки для обеспечения высокой точности хода. Кроме того, они требуют кропотливой и точной регулировки для обеспечения строго перпендикулярного плоскости Земли положения крутильного маятника.
Известны часы, у которых энергией подзавода пружины служит колебание давления воздушной среды.
Известно устройство для пневматического подзавода пружинного двигателя часов, содержащее пневмодвигатель, связанный через систему привода с заводным валом пружинного двигателя, которое снабжено последовательно соединенными триггером и усилителем, выход которого соединен с пневмодвигателем, а выходы триггера через путевые переключатели - с системой привода, выполненной в виде ходового винта с гайкой, одна сторона которого зафиксирована от проворачивания, а другая выполнена в виде заслонки переключения путевых выключателеЙ, и дополнительно снабжено последовательно соединенными системой аварийной сигнализации и логическим элементом «НЕ-ИЛИ», вход которого через путевой переключатель связан с заслонкой [13].
Недостатком данного устройства для пневматического подзавода пружинного двигателя часов является невозможность использования энергии разности температур.
Наиболее близким по технической сущности и достигаемому при использовании изобретения техническому результату (прототипом) являЮтся разработанные ранее автором механизм автоподзавода часов часы с механизмом автоподзавода, и способ автоподзавода часов облегчен и обладает повышенной чувствительностью к внешним воздействиям, компактен и прост по конструкции, надежен в использовании, дешев в производстве, что обеспечивается за счет того, что механизм автоподзавода часов содержит инерционную массу, перемещающуюся при изменении положения часов, и колесную систему с возможностью кинематической связи с барабаном пружинного двигателя часов, при этом, согласно изобретению, в качестве инерционной массы используют размещенный на плате часовой механизм с возможностью качания платы в неподвижном корпусе и подзавода пружинного двигателя при качании платы [14].
Задачи и технический результат
Задача предлагаемого изобретения и получаемый от его использования технический результат состоЯт в разработке и практическОЙ реализациИ простых по конструкции и дешевых в производстве часов и часовых механизмов с автоматическим заводом и подзаводом двигателя часов с получения энергии для завода и подзавода часов от разности температур различных областей пространства относительно корпуса часов.
Техническим результатом, получаемым при использовании изобретения, является упрощение конструкции привода (движителя) часов, автоматического завода и подзавода двигателя часового механизма и обеспечение автоматического завода и подзавода двигателя часового механизма даже при отсутствии движений пользователя посредством использования разности температур различных областей пространства относительно корпуса часов, в частности с получением энергии для хода, завода и подзавода наручных часов от разности температур у поверхности руки пользователя со стороны задней крышки часов и температуры воздуха со стороны циферблата и боковых сторон корпуса часов.
Раскрытие изобретения
Поставленная задача решается, а требуемый результат при использовании изобретения достигается тем, что в автоматическом приводе механизма наручных часов, содержащем источник энергии движения, согласно изобретению в качестве источника энергии движения содержится тепловой двигатель с возможностью преобразования разницы температур в разных точках пространства в движение механизма наручных часов, с возможностью преобразования разности температур у поверхности руки пользователя часов и температуры окружающего воздуха в движение механизма наручных часов, причем источник энергии выполнен в виде теплового двигателя Стирлинга гамма-типа, роторного типа или свободно-поршневого типа.
Автоматический привод механизма наручных часов может быть выполнен с возможностью
автоматического завода или подзавода двигателя механизма наручных часов;
автоматического завода или подзавода пружинного двигателя механизма наручных часов;
использования в качестве охладителя боковых сторон корпуса часов или стороны циферблата, а качестве теплоприемника (нагревателя) - задней крышки или части задней крышки корпуса часов с расположенным между ними теплоизоляционным материалом с низким коэффициентом теплопроводности;
использования в качестве охладителя механизма наручных часов движущихся деталей механизма наручных часов или маховика в форме крыльчатки;
использования в качестве охладителя ребер, канавок или дополнительных элементов охлаждения на корпусе наручных часов;
использования в качестве нагревателя соприкасающейся с рукой пользователя наручных часов части корпуса наручных часов, задней крышки часов, выполненной из материала с высоким коэффициентом теплопроводности, например из алюминия, сплавов алюминия, меди, медного сплава, серебра, сплава серебра или сплавов золота;
использования в качестве нагревателя соприкасающейся с рукой пользователя наручных часов части корпуса наручных часов, задней крышки часов, выполненной эргономичной формы, и/или ремешка/браслета часов, выполненного с внутренней стороны прилегающей к руке пользователя наручных часов с возможностью дополнительного теплоприема из материала с высокой теплопроводностью, а с наружной стороны накрытой теплоизоляционным материалом;
нагревания от Солнца или с возможностью создания разницы температур с использованием энергии Солнца;
функционирования совместно с дополнительными источником энергии движения, например с механизмом автоподзавода;
использования в качестве рабочего тела газа - воздуха, водорода, гелия, паров ацетона, спирта иного химического соединения или
с возможностью привода наручных часов с базовым серийно выпускаемым механизмом наручных часов как в обычном исполнении, так и с дополнительной доработкой, например с фрикционным внешним концом заводной пружины, для обеспечения «бесконечного завода» пружины механизма наручных часов.
При этом автоматический привод механизма наручных часов может быть выполнен с механизмом принудительного начального запуска с возможностью совместного функционирования с другими двигателями или с возможностью преобразования движения (вращательное, возвратно-поступательное) поступающего с теплового двигателя Стирлинга во вращение заводного вала или вала барабана часового механизма.
Поставленная задача решается, а требуемый результат при использовании изобретения достигается также тем, что механизм наручных часов с автоматическим приводом, содержащий автоматический привод с источником энергии движения в качестве источника энергии движения автоматический привод содержит тепловой двигатель с возможностью преобразования разницы температур в разных точках пространства в движение механизма наручных часов, с возможностью преобразования разности температур у поверхности руки пользователя часов и температуры окружающего воздуха в движение механизма наручных часов и может быть выполнен в виде теплового двигателя Стирлинга гамма-типа, роторного типа или свободно-поршневого типа.
При этом механизм наручных часов с автоматическим приводом может содержать описанный выше автоматический привод механизма наручных часов.
Поставленная задача решается, а требуемый результат при использовании изобретения достигается также тем, что наручные часы с автоматическим приводом, содержащие корпус и механизм с автоматическим приводом, содержащим источник энергии движения в качестве источника энергии движения автоматический привод содержит тепловой двигатель с возможностью преобразования разницы температур в разных точках пространства в движение механизма наручных часов, с возможностью преобразования разности температур у поверхности руки пользователя часов и температуры окружающего воздуха в движение механизма наручных часов, а источник энергии автоматического привода выполнен в виде теплового двигателя Стирлинга гамма-типа, роторного типа или свободно-поршневого типа.
При этом часы с автоматическим приводом содержат описанный выше автоматический привод механических наручных часов или содержат описанный выше механизм наручных часов с автоматическим приводом.
Поставленная задача решается, а требуемый результат при использовании изобретения достигается также тем, что по способу автоматического приведения в движение механических наручных часов в качестве привода часов используют тепловой двигатель с возможностью преобразования разницы температур в разных точках пространства у корпуса часов в движение часового механизма, с возможностью преобразования разности температур у поверхности руки пользователя со стороны задней крышки часов и температуры воздуха с боковых сторон корпуса часов или со стороны циферблата в движение часового механизма, при этом используют тепловой двигатель Стирлинга гамма-типа, роторного типа или свободно-поршневого типа с возможностью
автоматического завода или подзавода двигателя часового механизма;
автоматического завода или подзавода пружинного двигателя часового механизма.
При этом в качестве охладителя теплового двигателя используют боковые стороны корпуса часов, сторону циферблата, а качестве теплоприемника используют заднюю крышку или часть задней крышки корпуса часов с расположенным между ними теплоизоляционным материалом с низким коэффициентом теплопроводности или в качестве охладителя теплового двигателя используют часовой механизм, или отдельные движущиеся детали часового механизма, или маховик в форме крыльчатки.
Для интенсификации охлаждения теплового двигателя выполняют на корпусе часов ребра, канавки или дополнительные элементы охлаждения.
Для интенсификации нагревания теплового двигателя соприкасающуюся с рукой пользователя часть корпуса часов часть выполняют из материала с высоким коэффициентом теплопроводности, например из алюминия, сплавов алюминия, меди, медного сплава, серебра, сплава серебра или сплавов золота или соприкасающуюся с рукой пользователя часть корпуса часов выполняют эргономичной формы и/или ремешок/браслет часов с внутренней стороны, прилегающей к руке пользователя, выполняют с возможностью дополнительного теплоприема из материала с высокой теплопроводностью, а с наружной стороны он накрыт теплоизоляционным материалом.
При этом тепловой двигатель выполняют с возможностью нагревания от Солнца или с возможностью создания разницы температур путем расположения нагревателя к Солнцу или иному источнику внешнего тепла.
При этом тепловой двигатель выполняют с возможностью
функционирования совместно с дополнительными источниками энергии движения, например с механизмом автоподзавода;
использования в качестве рабочего тела газа - воздуха, водорода, гелия, паров ацетона, спирта иного химического соединения или привода часов с базовым серийно выпускаемым часовым механизмом как в обычном исполнении, так и с дополнительной доработкой, например с фрикционным внешним концом заводной пружины, для обеспечения «бесконечного завода» пружины.
При этом тепловой двигатель выполняют с механизмом принудительного начального запуска и могут одновременно использовать несколько тепловых двигателей.
Основные термины и определения
В настоящей заявке используются термины и определения, имеющие следующее значение:
Теплообменник - это основная часть теплового двигателя Стирлинга, предназначенная для передачи температуры от среды с более высокой температурой к среде с более низкой температурой.
Кривошипно-шатунный механизм - устройство, позволяющее преобразовать возвратно-поступательное движение поршня во вращательное движение вала.
Вытеснитель, дисплейсер - один из поршней двигателя Стирлинга, работающий в условиях высоких перепадов температур и низких перепадов давления; как правило он имеет небольшую массу.
Нагреватель - теплообменник двигателя Стирлинга, в котором осуществляется процесс передачи теплоты от источника к рабочему телу двигателя.
Рабочий поршень - один из поршней двигателя Стирлинга, работающий в условиях высоких перепадов давления и низких перепадов температур.
Цикл Стирлинга - идеализированный термодинамический цикл, состоящий из двух изотермических процессов сжатия и расширения и двух изохорических регенеративных процессов.
Рабочее тело - газ, жидкость или пар, которые периодически сжимаются или расширяются при соответствующих температурах в рабочей плоскости двигателя Стирлинга.
Спусковой регулятор - спусковым регулятором часового механизма называется устройство, состоящее из осциллятора, совершающего равномерные колебания, и спуска, преобразующего колебания в интервалы времени исполнительного устройства, при этом поступление энергии на осциллятор для поддержания его колебания регулируется тем же спуском.
Зубчатая передача (основная колесная система) состоит из зубчатых колес, связывает двигатель со спусковым регулятором и передает движение часовому механизму.
Механический аккумулятор (источник энергии, механический аккумулятор) необходим для аккумулирования энергии и приведения в действие и поддержания действия часового механизма. В основном в часах применяют пружинные и гиревые двигатели. Пружинный двигатель аккумулирует энергию завода часов. В наручных часах, как правило, используют барабан со спиральной пружиной внутри.
Стрелочный механизм является исполнительным устройством, как правило, состоит из системы зубчатых колес и передает движение от основной колесной системы стрелкам.
Механизм завода часов и перевода стрелок позволяет вручную завести пружинный двигатель и установить стрелки в нужное положение. Этот механизм может состоять из заводной головки, заводного вала, системы рычагов и зубчатых колес.
Осциллятор - система, которая при смещении из положения равновесия испытывает действие возвращающей силы, пропорциональной смещению. В часах осциллятором, как правило, является маятник или система баланс-спираль.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
В предпочтительных, показанных на чертежах вариантах конструктивного исполнения устройство теплового двигателя Стирлинга для часов часовой механизм с двигателем Стирлинга и часы с двигателем Стирлинга показаны: рабочий цилиндр 1, внутренняя область рабочего цилиндра 2, поршень рабочего цилиндра 3, нагреватель-теплосъемник 4, охладитель 5, теплообменный цилиндр 6, дисплейсер-вытеснитель 7, стенки теплообменного цилиндра 8, шток дисплейсера 9, втулка охладителя 10, маховик 11, кривошипный шарнир поршня теплообменника 12, кривошипный шарнир рабочего поршня 13, кривошипный шарнир теплообменного цилиндра 14, кривошип 15, шатун дисплейсера 16, шатун рабочего цилиндра 17, шарнир оси рабочего поршня 18, шток рабочего поршня 19, рука человека 20, лапки корпуса 21, корпус 22, радиатор корпуса 23, циферблат 24, стекло 25, часовой механизм 26, минутная стрелка 27, часовая стрелка 28, ремешок 29, заводная головка 30, теплопроводная подложка ремешка 31, коническое колесо вала маховика 32, коническое колесо передаточного механизма 33, первое колесо редуктора 34, второе колесо редуктора 35, барабанное колесо 36, вал барабана 37, стойка крепления маховика и кривошипа 38, выходной вал двигателя Стирлинга 39, первое дополнительное колесо 40, второе дополнительное колесо 41.
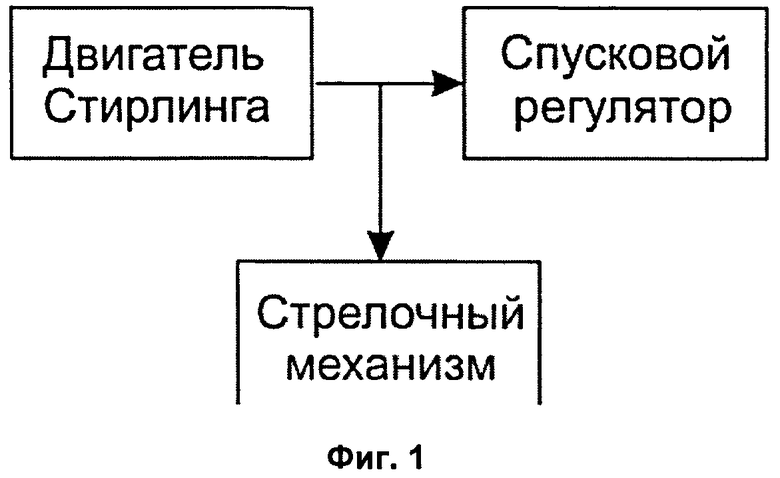
На фиг.1 показана структурно-функциональная схема простейших часов с тепловым двигателем Стирлинга, без аккумулятора энергии, на которой показаны сопряженные средствами кинематической связи тепловой двигатель Стирлинга, спусковой регулятор, стрелочный механизм.
На фиг.2 показана структурно-функциональная схема часового механизма с тепловым двигателем Стирлинга, на которой показаны соединенные средствами кинематической связи работающий от разницы температур двигатель Стирлинга, передаточный механизм, механический аккумулятор (пружинный двигатель, гиревой двигатель, пневматический аккумулятор, барабан часов и т.п.), зубчатая передача, спуск, осциллятор, стрелочный механизм. Пунктирной линией выделены функциональные блоки, присущие обычному стандартному часовому механизму.
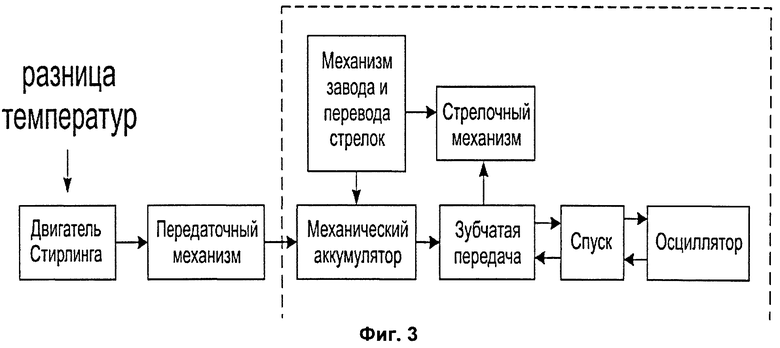
На фиг.3 показана структурно-функциональная схема прибора с часовым механизмом с тепловым двигателем Стирлинга, включающая в себя соединенные средствами кинематической связи работающий от разницы температур двигателеь Стирлинга, передаточный механизм, механический аккумулятор (пружинный двигатель, гиревой двигатель, пневматический аккумулятор, барабан часов и т.п.), механизм завода и перевода стрелок, стрелочный механизм, зубчатая передача, спуск и осциллятор. Пунктирной линией выделены функциональные блоки, присущие обычному стандартному часовому механизму.
На фиг.4 показана конструкция теплового двигателя Стирлинга гамма-типа в возможной компоновке для использования в механизме часов, на которой показан рабочий цилиндр 1, внутренняя область рабочего цилиндра 2, поршень рабочего цилиндра 3, нагреватель 4, охладитель 5, теплообменный цилиндр 6, дисплейсер-вытеснитель 7, стенки теплообменного цилиндра 8, шток дисплейсера 9, втулка охладителя 10, маховик 11, кривошипный шарнир поршня теплообменника 12, кривошипный шарнир рабочего поршня 13, кривошипный шарнир теплообменного цилиндра 14, кривошип 15, шатун дисплейсера 16, шатун рабочего цилиндра 17, шарнир оси рабочего поршня 18, шток рабочего поршня 19.
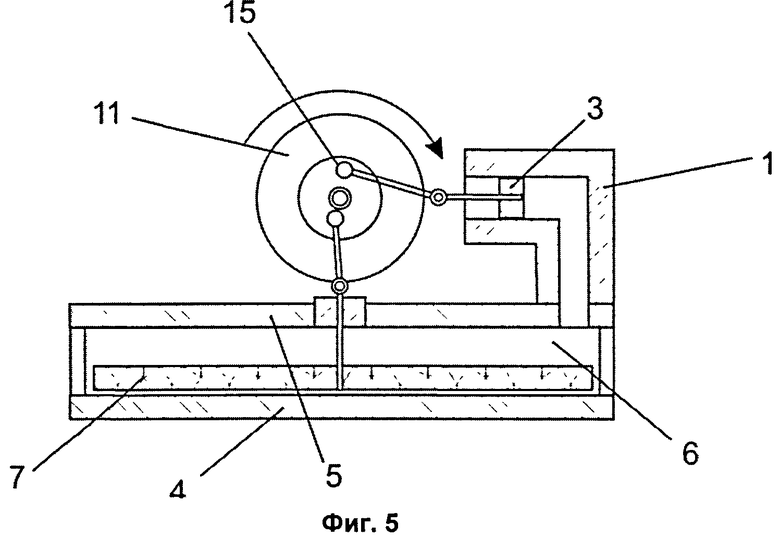
На фиг.5 показан 1-й такт работы двигателя Стирлинга гамма-типа - такт сжатия рабочего тела при постоянной температуре: дисплейсер 7 находится вблизи нижней мертвой точки (НМТ) и остается условно неподвижным. Газ сжимается рабочим поршнем 3 малого цилиндра 1. Давление газа возрастает, а температура остается постоянной, так как теплота сжатия отводится через холодный торец теплообменного цилиндра 5 в окружающую среду. Под условной неподвижностью в данном случае подразумевают малую высоту перемещения поршня при прохождении кривошипом расстояния вблизи верхней или нижней мертвой точки.
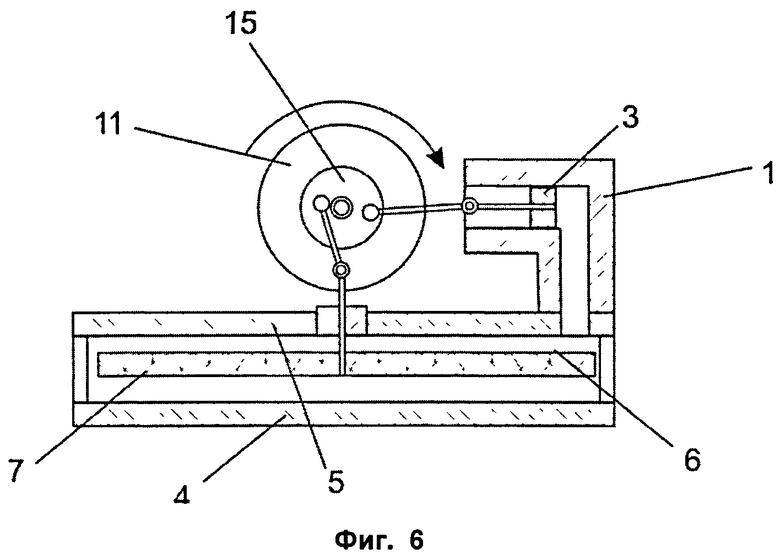
На фиг.6 показан 2-й такт работы двигателя Стирлинга гамма-типа - такт нагревания рабочего тела при постоянном объеме: рабочий поршень 3 рабочего цилиндра 1 находится вблизи НМТ и полностью перемещает холодный сжатый газ в теплообменный цилиндр 6, вытеснитель 7 которого движется к верхней мертвой точке (ВМТ) и вытесняет газ в горячую полость. Так как при этом суммарный внутренний объем цилиндров двигателя остается постоянным, рабочее тело разогревается, давление повышается и достигает максимального значения. Прирост давления идет параллельно с выталкиванием рабочего поршня 3. В результате давление не достигает теоретически рассчитанного максимума. Данный факт также объясняет хороший к.п.д. на малых оборотах двигателя. Рабочее тело прогревается лучше и прирост давления приближается к максимуму.
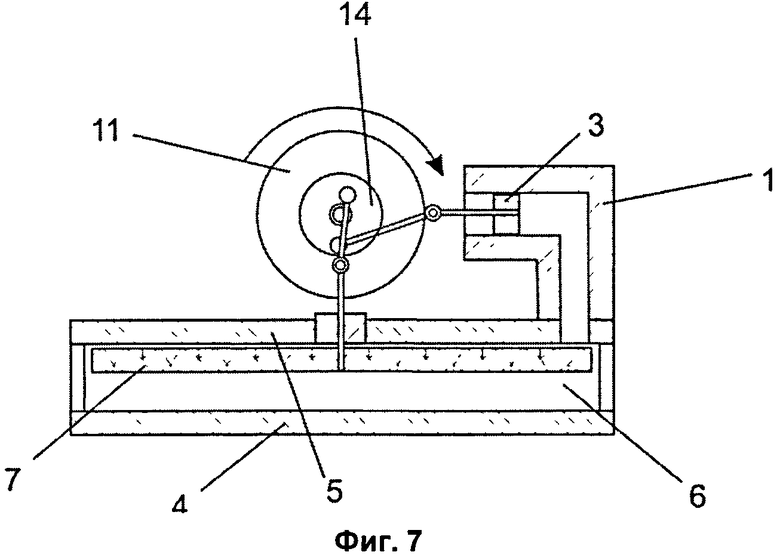
На фиг.7 показан третий такт работы двигателя Стирлинга гамма-типа - такт расширения при постоянной температуре газа: дисплейсер7 теплообменного цилиндра 6 находится вблизи верхней мертвой точки (ВМТ) и остается условно неподвижным. Поршень рабочего цилиндра 3 под действием давления газа движется к верхней мертвой точке. Происходит расширение горячего газа в полости рабочего цилиндра 1. Полезная работа, совершаемая поршнем рабочего цилиндра 3, через кривошипно-шатунный механизм передается на кривошип 14 и маховик 11. Давление в цилиндрах двигателя при этом падает, а температура газа в горячей полости остается постоянной, так как к нему подводится тепло от источника тепла через горячую стенку цилиндра.
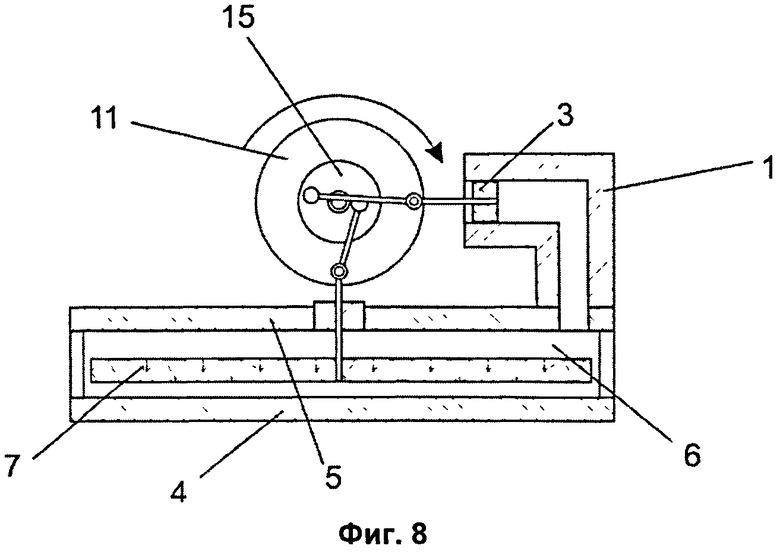
На фиг.8 показан четвертый такт работы двигателя Стирлинга гамма-типа - такт охлаждения при неизменном объеме: поршень рабочего цилиндра 3 находится вблизи ВМТ и остается условно неподвижным. Дисплейсер 7 теплообменного цилиндра движется к НМТ и перемещает газ, оставшийся в горячей части, в холодную часть цилиндра. Так как при этом суммарный внутренний объем цилиндров двигателя остается постоянным, давление газа в них продолжает падать и достигает минимального значения. В моделях двигателей, содержащих рабочее тело при атмосферном давлении, четвертый такт также является рабочим, поскольку давление падает резко, и возникает кратковременное разряжение. В результате рабочий поршень 3 с усилием втягивается в цилиндр 1, совершая дополнительную работу. Из четырех тактов два - рабочие.
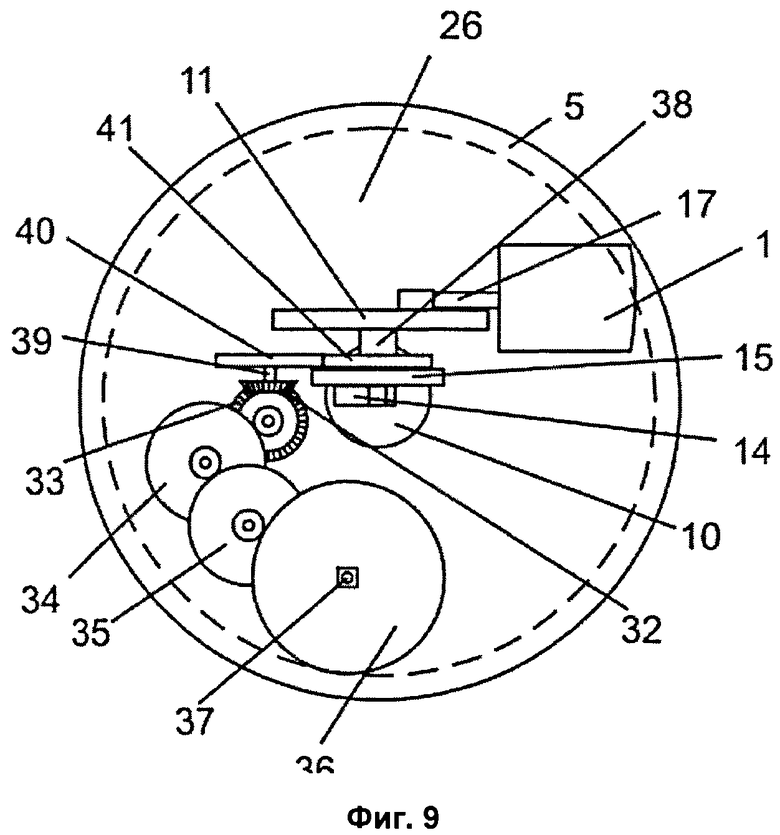
На фиг.9 показан вид сверху на механизм часов, на котором показаны рабочий цилиндр 1, охладитель 5, втулка охладителя 10, маховик 11, кривошипный шарнир теплообменного цилиндра 14, кривошип 15, шатун рабочего цилиндра 17, механизм 26, коническое колесо вала маховика 32, коническое колесо передаточного механизма 33, первое колесо редуктора 34, второе колесо редуктора 35, барабанное колесо 36, вал барабана 37, стойка крепления маховика и кривошипа 38, выходной вал двигателя Стирлинга 39, первое дополнительное колесо 40, второе дополнительное колесо 41.
Стойка крепления маховика и кривошипа 38 держит вал 39, на котором насажены кривошип 15 и маховик 11. На вал 39 насажено коничское колесо 32, которое передает вращение на коническое колесо 33, разворачивая передачу на 90 градусов. Колесо 33 передает вращение на редуктор передаточного механизма, состоящий из колес 34 и 35, которые уменьшают скорость вращения и увеличивают момент. Колесо 35 редуктора передает вращение на барабанное колесо часового механизма и через него заводит заводной вал 37 пружинного аккумулятора часового механизма 26. Используемые для удобства компановки реверсивные колеса 40 и 41 передают вращение от вала кривошипа к выходному валу двигателя 39.
На фиг.10 показан разрез корпуса часов с двигателем Стирлинга гамма-типа в возможной компоновке для использования в часовом механизме часов, на котором показаны: рабочий цилиндр 1, нагреватель 4, охладитель 5, маховик 11, рука человека 20, лапки корпуса 21, корпус 22, радиатор корпуса 23, циферблат 24, стекло 25, часовой механизм 26, минутная стрелка 27, часовая стрелка 28, ремешок 29.
На фигуре 10 видно, что поступающее тепло от руки человека 20 поступает на крышку нагревателя 4, а корпус 22 соединен с охладителем 5, и канавки радиатора дополнительно охлаждают корпус для получения дополнительного градиента температур.
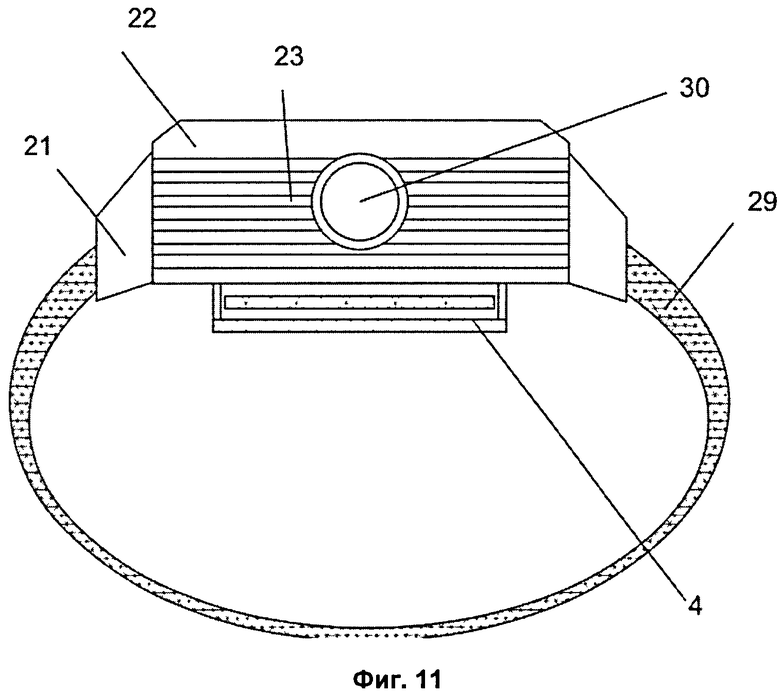
На фиг.11 показан вид сбоку наручных часов с тепловым двигателем Стерлинга, на котором показаны корпус часов 22, лапки корпуса часов 21, ремешок 29, радиатор корпуса 23, заводная головка 30, нагреватель 4.
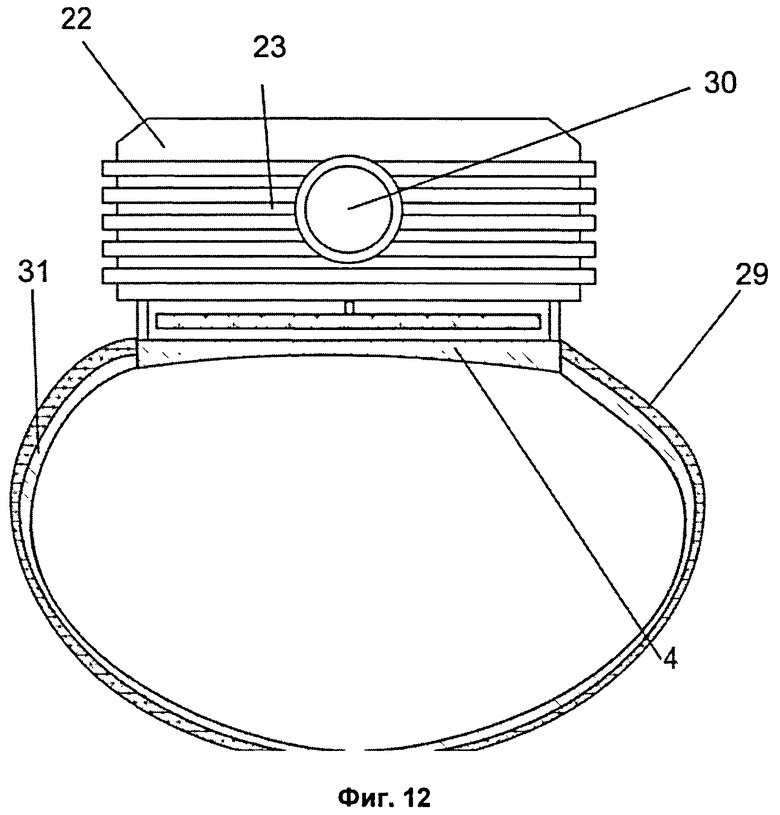
На фиг.12 показан вид сбоку наручных часов с тепловым двигателем Стерлинга в исполнении с эргономичной задней крышкой нагревателя, которая облегает кисть руки и способствует лучшему съему тепла и ремешка/браслета с теплопроводной подложкой для увеличения площади съема тепла. Ремешок/браслет в данном варианте конструкции крепится не к корпусу часов, а к задней крышке. На фигуре показаны: корпус 22, лапки корпуса 21, ремешок 29, радиатор корпуса 23, заводная головка 30, нагреватель 4, теплопроводная подложка ремешка 31.
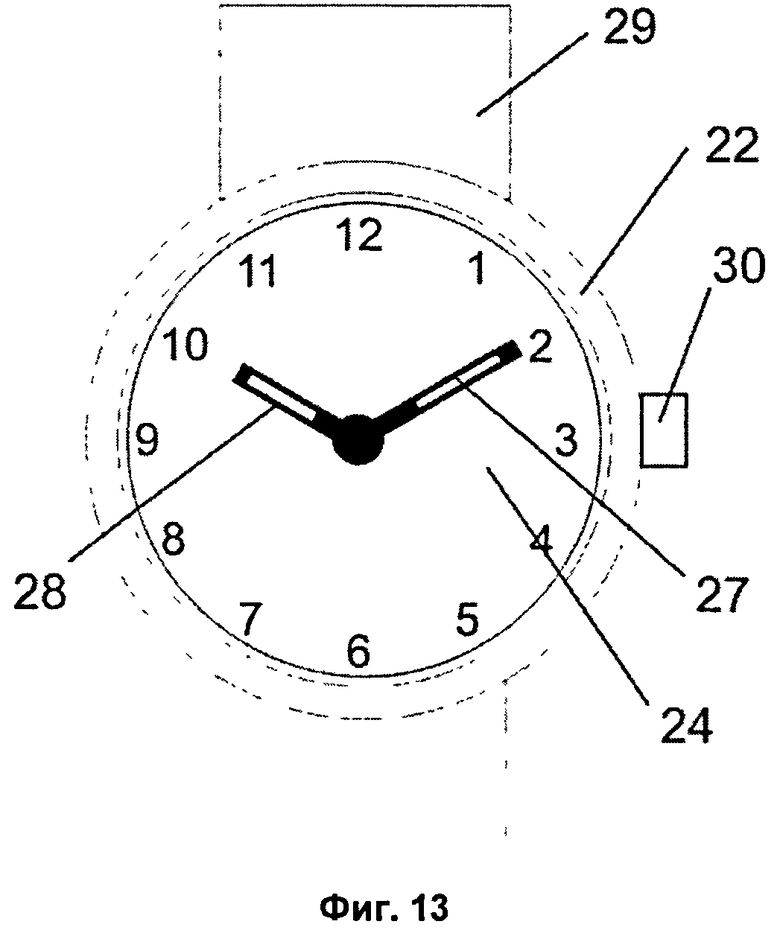
На фиг.13 показан общий вид часов с тепловым двигателем Стерлинга, на котором показаны: корпус 22, заводная головка 30, ремешок 29, циферблат 24, часовая стрелка 28, минутная стрелка 27.
Осуществление изобретения
Тепловой двигатель Стирлинга представляет собой механизм преобразования разницы температур в энергию механического движения, в частном случае во вращение маховика или выходного вала, сопряженного с передаточным механизмом.
Передаточный механизм преобразует движение (вращательное, возвратно-поступательное), поступающее с двигателя Стирлинга во вращение заводного вала или вала барабана часов, так же как и известные механизмы автоподзавода часов. Все остальные элементы кинематической схемы выполняют те же функции, как в обычном часовом механизме.
Часовой механизм может быть базовым, серийно выпускаемым, как в стандартном исполнении, так и с дополнительной доработкой, например фрикционным внешним концом заводной пружины, для обеспечения «бесконечного завода» пружины и предотвращения ее поломки или перенапряжения.
В качестве теплового двигателя может быть использован тепловой двигатель Стирлинга преимущественно типа гамма, так как он прост изготовлении, низкотемпературный, низкооборотистый и может работать на малом градиенте температур (3-4 градуса Цельсия).
Тепловой двигатель Стирлинга представляет собой тепловую машину, в которой жидкое или газообразное рабочее тело движется в замкнутом объеме. Принцип его действия основан на периодическом нагреве и охлаждении рабочего тела с извлечением энергии из возникающего при этом изменения объема рабочего тела. Может работать не только от сжигания топлива, но и практически от любого источника тепла [15].
В моделях двигателей Стирлинга, где теплообменный цилиндр не имеет качественного нагревателя, рабочее тело разогревается не полностью, но поскольку давление в газах распространяется равномерно во все стороны, его изменение оказывает действие и на рабочий поршень, заставляя его двигаться и совершать работу.
Двигатель Стирлинга типа гамма состоит из двух цилиндров (Фиг.4).
Большой цилиндр - это теплообменный цилиндр 6. Его задача - поочередно разогревать и охлаждать рабочее тело. Для этого один торец цилиндра разогревают - это нагреватель 4, другой торец охлаждают - это охладитель 5. Боковые стенки теплообменного цилиндра 8 выполнены из материала с низкой теплопроводностью. Большой поршень - дисплейсер-вытеснитель 7, выполненный из теплоизоляционного материала, свободно перемещается в теплообменном цилиндре и выполняет роль теплового клапана, пегегоняющего рабочее тело то к холодному, то к горячему торцу теплообменного цилиндра 6.
Малый цилиндр 1 является рабочим. Поршень рабочего цилиндра 3 плотно подогнан к рабочему цилиндру 1.
Поршень рабочего цилиндра 3 имеет шток 19, который через шарнир 18, соединен с шатуном 17, соединенным через шарнир 13 с кривошипом 15.
В свою очередь дисплейсер-вытеснитель 7 имеет шток 9, который через шарнир 12, соединен с шатуном дисплейсера 16, соединенным через шарнир 14 с кривошипом 15.
Шток 19, шарнир 18, шатун 17, шарнир 13, шток 9, шарнир 12, шатун 16, шарнир 14 кривошип 15 представляют собой кривошипно-шатунный механизм, предназначенный для преобразования возвратно-поступательного движения поршней 3 и дисплейсера-вытеснителя 7 во вращательное движение кривошипа 15.
Кривошип 15 кинематически (на схеме соосно) соединен с маховиком 11. Маховик 11 предназначен для выравнивания движения и преодоления мертвых положений поршня и дисплейсера.
Двигатель Стирлинга гамма-типа работает следующим образом:
Цикл Стирлинга основан на последовательном нагревании и охлаждении газа (его называют рабочим телом) в замкнутом объеме. Рабочее тело нагревается в горячей части двигателя, расширяется и производит полезную работу, после чего перегоняется в холодную часть двигателя, где охлаждается, сжимается и снова подается в горячую часть двигателя. Цикл повторяется. Количество рабочего тела остается неизменным, меняются его температура, давление и объем.
Весь цикл условно разделен на четыре такта (фиг.5-8). Условность заключается в том, что четкое разделение на такты в цикле отсутствует, процессы переходят один в другой. Это обусловлено отсутствием в конструкции двигателей Стирлинга клапанного механизма. Особенности функционирования двигателя Стирлинга в конкретных тактах движения показаны на фиг.5-8.
Кроме двигателя Стирлинга типа гамма могут быть также использованы двигатели Стирлинга свободнопоршневого типа и роторного типа, известные из уровня техники [16].
В двигателе Стирлинга свободнопоршневого типа, известного как двигатель Била или двигатели Стирлинга альфа-типа, есть три основных элемента: тяжелый рабочий поршень, легкий вытеснитель и цилиндр с уплотнениями на обоих концах, шток вытеснителя относительно большого диаметра проходит через рабочий поршень. Шток вытеснителя полый, с открытым торцом, так что внутренняя полость вытеснителя соединена (и фактически является ее частью) с полостью, расположенной ниже рабочего поршня, называемой буферной полостью. К рабочей полости относится часть цилиндра над рабочим поршнем, подразделяемая на полость сжатия - между рабочим поршнем и вытеснителем и полость расширения - над вытеснителем. Длинная узкая кольцевая щель между цилиндром и вытеснителем выполняет функцию регенератора между горячей полостью расширения и холодной полостью сжатия. Для полости расширения предусмотрен нагреватель, а для полости сжатия - холодильник.
В данном двигателе используется один цилиндр, но с двумя поршнями - дисплейсером и рабочим поршнем, расположенными первый над вторым по оси цилиндра. Шток дисплейсера проходит через крышку рабочего поршня и внутри его штока. Для обеспечения герметичности используются сальники. С одного края к цилиндру подводят тепло, с другой - охлаждают (на схеме зоны нагрева, регенерации и охлаждения вынесены в отдельный агрегат). Стенки рабочего поршня плотно прилегают к цилиндру. Дисплейсер, напротив, свободно движется в рабочем цилиндре. Дисплейсер выполнен из материала, имеющего низкую теплоемкость, и выполняет роль "теплового клапана". Он перемещает рабочее тело из горячей полости цилиндра в холодную и обратно, препятствуя наступлению термодинамического равновесия переноса тепла в системе. Рабочее тело либо нагревается (дисплейсер при этом нахордится в нижней мертвой точке), либо охлаждается (дисплейсер - в верхней мертвой точке). За счет этого обеспечивается циклический перепад давления в системе, преобразуемый затем рабочим поршнем в полезную работу. Нерабочий объем минимизирован за счет размещения вытеснителя и рабочего поршня в одном цилиндре, что позволяет выиграть в мощности на единицу объема двигателя. Сложность изготовления и обеспечения смазки и герметичности в сальниках таких двигателей - основной их недостаток.
В двигателе Стирлинга роторного типа, в отличие от классической схемы теплообменного цилиндра, где дисплейсер совершает возвратно-поступательные движения, функцию "теплового клапана" выполняет нессиметричный ротор. Вращаясь по оси он поочередно перекрывает горячую и холодную зоны, вызывая нагрев и охлаждение рабочего тела. Роторные Стирлинги отличаются более компактными размерами и могут быть выполнены полностью герметичными. Для этого в корпусе двигателя размещают генератор или выводят механический привод через магнитную муфту.
Недостатком двигателя роторного тип является сложность в обеспечении нагрева и охлаждения теплообменного цилиндра, поскольку в отличие от стандартного гамма-стирлинга нагревать и охлаждать приходится не торцы цилиндра, а боковые стенки. Вследствие этого теплопотери могут увеличиваться.
При реализации изобретения возможно использование как отдельно выпускаемого часового механизма, так и механизмов готовых кварцевых, механических, наручных, настенных, настольных часов.
В качестве механического аккумулятора может использоваться обычный пружинный двигатель часов со спиральной пружиной или разработанное ранее автором устройство для аккумулирования и передачи механической энергии в механизме часов, содержащее пару винт-гайка, состоящую из винта, на поверхности которого выполнены цилиндрические канавки, и зубчатой гайки, и витую цилиндрическую пружину, в котором вращательное движение завода часового механизма, осуществляющее сжатие витой цилиндрической пружины, расположенной на винте пары винт-гайка, в результате вращательного движения винта и поступательного движения зубчатой гайки вдоль винта преобразуется в поступательное движение сжатия витой цилиндрической пружины, аккумулируя энергию, которая при роспуске витой цилиндрической пружины преобразует поступательное движение витой цилиндрической пружины во вращательно-поступательное движение зубчатой гайки по цилиндрическим винтовым канавкам, предназначенным для выравнивания момента вращения, а вращательно-поступательное движение зубчатой гайки посредством ее зацепления с зубчатым колесом, расположенным на валу с возможностью перемещения, которое обеспечивается вилкой, помещенной поверх зубчатой гайки и зубчатого колеса, преобразуется в равномерное вращательное движение зубчатых колес [17].
В качестве вариантов исполнения отдельных элементов корпуса, деталей, узлов часов могут быть использованы различные известные и традиционные для часового производства технологии, материалы и конструктивные решения, обычно применяемые в часовой технике [18, 19, 20, 21].
Таким образом обеспечивается достижение требуемого технического результата, а именно упрощение конструкции привода (движителя) часов, автоматического завода и подзавода двигателя часового механизма и обеспечение автоматического завода и подзавода двигателя часового механизма при отсутствии движений пользователя посредством использования разности температур различных областей пространства относительно корпуса часов, в частности получения энергии для хода, завода и подзавода наручных часов от разности температур у поверхности руки пользователя со стороны задней крышки часов и температуры воздуха со стороны циферблата и боковых сторон корпуса часов..
Учитывая новизну совокупности существенных признаков, техническое решение поставленной задачи, изобретательский уровень и существенность всех общих и частных признаков полезной модели, доказанных в разделе «Уровень техники» и «Раскрытие изобретения», доказанную в разделе «Осуществление и промышленная реализация изобретения» техническую осуществимость и промышленную применимость изобретения, решение поставленных изобретательских задач и уверенное достижение требуемого технического результата при реализации и использовании изобретения, по нашему мнению, заявленная группа изобретений удовлетворяет всем требованиям охраноспособности, предъявляемым к изобретениям.
Проведенный анализ показывает также, что все общие и частные признаки изобретения являются существенными, так как каждый из них необходим, а все вместе они не только достаточны для достижения цели изобретения, но и позволяют реализовать изобретение промышленным способом.
Кроме этого, анализ совокупности существенных признаков изобретения и достигаемого при их использовании единого технического результата показывает наличие единого изобретательского замысла, тесную и неразрывную связь между способом автоматического приведения в движение механических наручных часов, механическими наручными часами с автоматическим приводом и автоматическим приводом механических наручных часов. Это позволяет объединить изобретения в одной заявке, то есть обеспечить требования критерия единства изобретения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. http://bse.sci-lib.com/article121589.html Часы (прибор). Большая Советская Энциклопедия.
2. http://www.watches.ru/index.php?page=30&art=55
3. http://www. watches. ru/index.php?page=30&art=55
4. http://remontchasov.ucoz.ru/index/avtopodzavod_v_chasakh/0-45.
5. http://www.oclock.info/master/articles/readarticle.php?tid=15&aid=93.
6. Аксельрод M. Теория и проектирование приборов времени. «Машиностроение», Ленинград, 1969, с.45-47.
7. RU 2310898, МПК G04B 1/00, конв. приоритет 09.07.2002 CH 1188/02, дата публикации заявки 10.07.2005, опубликовано 20.11.2007, заявка PCT EP 01.03.03/5 (09.07.2003), публикация PCT: WO 026.00.2004 (15.01.2004).
8. SU 720417, МПК G04B 5/02, опубликовано 05.03.80, БИ №9.
9. SU 343475, МПК G04B 5/02, опубликовано 22.06.72, БИ №20.
10. SU 1118956, МПК G04B 5/14, опубликовано 15.10.1984, БИ №38.
11. SU 146702, опубликовано БИ №8 за 1962 г.
12. Тарасов С.В. Приборы времени. Москва, «МАШИНОСТРОЕНИЕ», 1976, с.39-40.
13. SU 354392, G04B 3/12 Опубл. 01.01.1972.
14. RU 2482530, G04B 5/00 Опубл. 20.05.2013 (прототип).
15. Уокер Г. Машины, работающие по циклу Стирлинга. пер. с англ. М., Энергия 1978 г; Двигатели Стирлинга. Под. ред. Круглова М.Г. М., Машиностроение. 1977 г.; Двигатели Стирлинга. Сборник статей. Пер.с англ. Сутугина Б.В.; Под. ред. Бродянского В.М. М., Мир. 1975 г; Ридер Г., Хупер Ч. Двигатели Стирлинга. М., Мир, 1986 г.; Уокер Г. Двигатели Стирлинга. Перевод с английского. М., Машиностроение, 1985 г.
16. http://www.stirlingmotors.ru/Pages_pikch/Bill_engine.htm
17. RU 2012105052 G04B 3/00 опубл. 20.08.2013
18. Харитончук А.П. Справочная книга по ремонту часов. М., 1977, стр.18, 21.
19. Романов А.Д. Проектирование приборов времени. М., 1975, стр.140.
20. Тарасов С.В. Технология часового производства, М., 1963.
21. Попова В.Д., Гольдберг Н.Б. Устройство и технология сборки часов. М., 1989.


Изобретение относится к области часовой промышленности и может быть использовано при производстве механических наручных часов с автоматическим приводом с возможностью получения энергии движения от разности температур у поверхности руки пользователя со стороны задней крышки корпуса часов и температуры воздуха со стороны циферблата и боковых сторон корпуса часов. Для упрощения конструкции привода (движителя) часов, автоматического завода и подзавода двигателя часового механизма и обеспечения автоматического завода и подзавода часового механизма даже при отсутствии движений пользователя в автоматическом приводе механизма наручных часов, содержащем источник энергии движения в качестве источника энергии движения, содержит тепловой двигатель с возможностью преобразования разницы температур в разных точках пространства в движение механизма наручных часов, в частности тепловой двигатель с возможностью преобразования разности температур у поверхности руки пользователя часов и температуры окружающего воздуха в движение механизма наручных часов в виде теплового двигателя Стирлинга гамма-типа, роторного типа или свободно-поршневого типа. Механизм наручных часов с автоматическим приводом и механические наручные часы содержат указанный автоматический привод. По способу автоматического приведения в движение механических наручных часов в качестве привода часов используют тепловой двигатель с возможностью преобразования разницы температур в разных точках пространства у корпуса часов в движение часового механизма, в частности используют тепловой двигатель Стирлинга с возможностью преобразования разности температур у поверхности руки пользователя со стороны задней крышки часов и температуры воздуха с боковых сторон корпуса часов или со стороны циферблата в движение часового механизма. 4 н. и 38 з.п. ф-лы, 13 ил.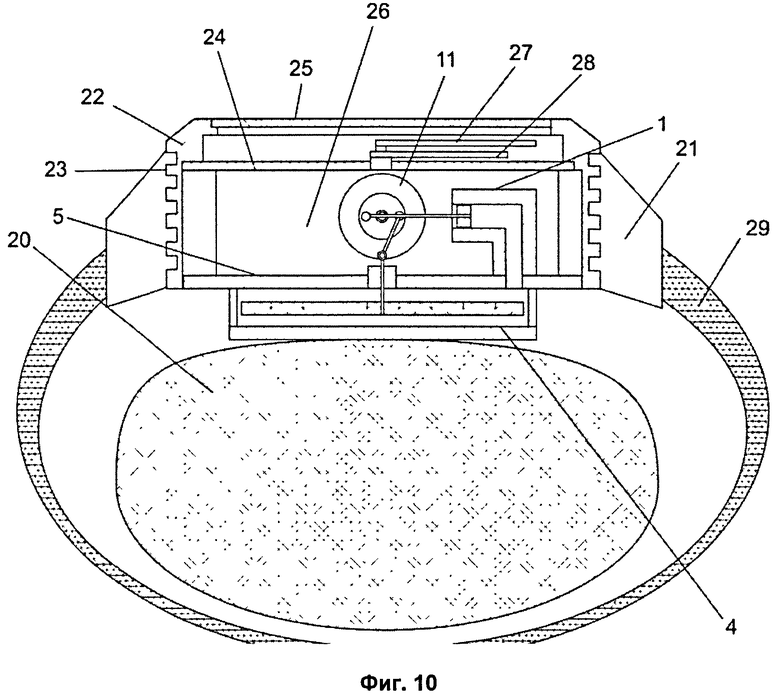
1. Автоматический привод механизма наручных часов, содержащий источник энергии движения, отличающийся тем, что в качестве источника энергии движения содержит тепловой двигатель Стирлинга с возможностью преобразования разницы температур в разных точках пространства в движение механизма наручных часов.
2. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что содержит тепловой двигатель Стирлинга с возможностью преобразования разности температур у поверхности руки пользователя часов и температуры окружающего воздуха в движение механизма наручных часов.
3. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что содержит тепловой двигатель Стирлинга гамма-типа, роторного типа или свободно-поршневого типа.
4. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью автоматического завода или подзавода двигателя механизма наручных часов.
5. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью автоматического завода или подзавода пружинного двигателя механизма наручных часов.
6. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью использования в качестве охладителя боковых сторон корпуса часов или стороны циферблата, а качестве теплоприемника и нагревателя - задней крышки или части задней крышки корпуса часов с расположенным между ними теплоизоляционным материалом с низким коэффициентом теплопроводности;
7. Автоматический привод механизма наручных часов по п. 3, отличающийся тем, что выполнен с возможностью использования в качестве охладителя механизма наручных часов, движущихся деталей механизма наручных часов или маховика в форме крыльчатки.
8. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью использования в качестве охладителя ребер, канавок или дополнительных элементов охлаждения на корпусе наручных часов.
9. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что тепловой двигатель выполнен с возможностью использования в качестве теплоприемника и нагревателя соприкасающейся с рукой пользователя наручных часов части корпуса наручных часов, выполненной из материала с высоким коэффициентом теплопроводности, например из алюминия, сплавов алюминия, меди, медного сплава, серебра, сплава серебра или сплавов золота.
10. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью использования в качестве теплоприемника и нагревателя соприкасающейся с рукой пользователя наручных часов части корпуса наручных часов, выполненной эргономичной формы и/или ремешка/браслета часов, выполненного с внутренней стороны, прилегающей к руке пользователя наручных часов с возможностью дополнительного теплоприема из материала с высокой теплопроводностью, а с наружной стороны накрытой теплоизоляционным материалом.
11. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью нагревания от Солнца или с возможностью создания разницы температур с использованием энергии Солнца или другого внешнего источника тепла.
12. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью функционирования совместно с дополнительными источниками энергии движения, например с механизмом автоподзавода.
13. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью использования в качестве рабочего тела газа - воздуха, водорода, гелия, паров ацетона, спирта, иного химического соединения.
14. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью привода наручных часов с базовым серийно выпускаемым механизмом наручных часов как в обычном исполнении, так и с дополнительной доработкой, например с фрикционным внешним концом заводной пружины, для обеспечения «бесконечного завода» пружины механизма наручных часов.
15. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с механизмом принудительного начального запуска.
16. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что выполнен с возможностью совместного функционирования с другими двигателями.
17. Автоматический привод механизма наручных часов по п. 1, отличающийся тем, что дополнительно содержит передаточный механизм в виде механизма с возможностью преобразования движения (вращательное, возвратно-поступательное), поступающего с теплового двигателя Стирлинга во вращение заводного вала или вала барабана часового механизма.
18. Механизм наручных часов с автоматическим приводом, содержащим автоматический привод с источником энергии движения, отличающийся тем, что в качестве источника энергии движения автоматический привод содержит тепловой двигатель Стирлинга с возможностью преобразования разницы температур в разных точках пространства в движение механизма наручных часов.
19. Механизм наручных часов с автоматическим приводом по п. 18, отличающийся тем, что автоматический привод содержит тепловой двигатель Стирлинга с возможностью преобразования разности температур у поверхности руки пользователя часов и температуры окружающего воздуха в движение механизма наручных часов.
20. Механизм наручных часов с автоматическим приводом по п. 18, отличающийся тем, что источник энергии автоматического привода выполнен в виде теплового двигателя Стирлинга гамма-типа, роторного типа или свободно-поршневого типа.
21. Механизм наручных часов с автоматическим приводом по п. 18, отличающийся тем, что содержит автоматический привод механизма наручных часов по любому из пп. с 1 по 17.
22. Механические наручные часы с автоматическим приводом, содержащим корпус и механизм с автоматическим приводом, содержащим источник энергии движения, отличающиеся тем, что в качестве источника энергии движения автоматический привод содержит тепловой двигатель Стирлинга с возможностью преобразования разницы температур в разных точках пространства в движение механизма наручных часов.
23. Механические наручные часы с автоматическим приводом по п. 22, отличающиеся тем, что автоматический привод содержит тепловой двигатель Стирлинга с возможностью преобразования разности температур у поверхности руки пользователя часов и температуры окружающего воздуха в движение механизма наручных часов.
24. Механические наручные часы с автоматическим приводом по п. 22, отличающиеся тем, что источник энергии автоматического привода выполнен в виде теплового двигателя Стирлинга гамма-типа, роторного типа или свободно-поршневого типа.
25. Механические наручные часы с автоматическим приводом по п. 22, отличающиеся тем, что содержат автоматический привод механизма наручных часов по любому из пп. с 1 по 17.
26. Механические наручные часы с автоматическим приводом по п.22, отличающиеся тем, что содержат механизм наручных часов с автоматическим приводом по любому из пп. с 18 по 21.
27. Способ автоматического приведения в движение механических наручных часов, отличающийся тем, что в качестве привода часов используют тепловой двигатель Стирлинга с возможностью преобразования разницы температур в разных точках пространства у корпуса часов в движение часового механизма.
28. Способ по п. 27, отличающийся тем, что используют тепловой двигатель Стирлинга с возможностью преобразования разности температур у поверхности руки пользователя со стороны задней крышки часов и температуры воздуха с боковых сторон корпуса часов или со стороны циферблата в движение часового механизма.
29. Способ по п. 27, отличающийся тем, что используют тепловой двигатель Стирлинга гамма-типа, роторного типа или свободно-поршневого типа.
30. Способ по п. 27, отличающийся тем, что используют тепловой двигатель Стирлинга с возможностью автоматического завода или подзавода двигателя часового механизма.
31. Способ по п. 27, отличающийся тем, что используют тепловой двигатель Стирлинга с возможностью автоматического завода или подзавода пружинного двигателя часового механизма.
32. Способ по п. 27, отличающийся тем, что в качестве охладителя теплового двигателя Стирлинга используют боковые стороны корпуса часов, а качестве теплоприемника и нагревателя используют заднюю крышку или часть задней крышки корпуса часов с расположенным между ними теплоизоляционным материалом с низким коэффициентом теплопроводности;
33. Способ по п. 27, отличающийся тем, что в качестве охладителя теплового двигателя Стирлинга используют часовой механизм, или отдельные движущиеся детали часового механизма, или маховик в форме крыльчатки.
34. Способ по п. 27, отличающийся тем, что для интенсификации охлаждения теплового двигателя Стирлинга выполняют на корпусе часов ребра, канавки или дополнительные элементы охлаждения.
35. Способ по п. 27, отличающийся тем, что для интенсификации нагревания теплового двигателя Стирлинга соприкасающуюся с рукой пользователя часть корпуса часов выполняют из материала с высоким коэффициентом теплопроводности, например из алюминия, сплавов алюминия, меди, медного сплава, серебра, сплава серебра или сплавов золота.
36. Способ по п. 27, отличающийся тем, что для интенсификации нагревания теплового двигателя Стирлинга соприкасающуюся с рукой пользователя часть корпуса часов выполняют эргономичной формы и/или ремешок/браслет часов с внутренней стороны, прилегающей к руке пользователя, выполняют с возможностью дополнительного теплоприема из материала с высокой теплопроводностью, а с наружной стороны он накрыт теплоизоляционным материалом.
37. Способ по п. 27, отличающийся тем, что тепловой двигатель Стирлинга выполняют с возможностью нагревания от Солнца или с возможностью создания разницы температур путем расположения нагревателя к Солнцу или другому внешнему источнику тепла.
38. Способ по п. 27, отличающийся тем, что тепловой двигатель Стирлинга выполняют с возможностью функционирования совместно с дополнительными источниками энергии движения, например с механизмом автоподзавода.
39. Способ по п. 27, отличающийся тем, что тепловой двигатель Стирлинга выполняют с возможностью использования в качестве рабочего тела газа - воздуха, водорода, гелия, паров ацетона, спирта иного химического соединения.
40. Способ по п. 27, отличающийся тем, что тепловой двигатель Стирлинга выполняют с возможностью привода часов с базовым серийно выпускаемым часовым механизмом как в обычном исполнении, так и с дополнительной доработкой, например с фрикционным внешним концом заводной пружины, для обеспечения «бесконечного завода» пружины.
41. Способ по п. 27, отличающийся тем, что тепловой двигатель Стирлинга выполняют с механизмом принудительного начального запуска.
42. Способ по п. 27, отличающийся тем, что одновременно используют несколько тепловых двигателей Стирлинга.
| Способ получения вазелино-латексных гранул органических пигментов | 1960 |
|
SU140570A1 |
| US2003206497 A1 (MIYAZAWA KENICHI et al., SEIKO EPSON CORPORATION), 06.11.2003 | |||
| US6291760 B1 (SEIKO INSTR | |||
| INC.), 18.09.2001 | |||
| СПОСОБ БИОМИКРОСКОПИИ КОНЪЮКТИВЫ ГЛАЗА | 1991 |
|
RU2020863C1 |
| Способ выполнения обратной засыпки ограждающей конструкции | 1987 |
|
SU1520193A1 |
| US6427444 B1 (SEIKO EPSON CORP), 06.08.2002 | |||

