Настоящее изобретение относится к прецизионному станкостроению, а более конкретно - к редуктору с циклоидальным зацеплением.
Наиболее эффективно настоящее изобретение может быть использовано в приводах координатных угловых и линейных перемещений исполнительных органов металлорежущих станков в качестве особопрецизионной механической зубчатой передачи.
В настоящее время в мировой станкостроительной промышленности возникла необходимость в создании особопрецизионных станков типа "обрабатывающий центр", в которых концентрируются токарные, расточные, фрезерные и шлифовальные технологические операции механической обработки сложнопрофильных изделий (в том числе корпусных деталей машин и механизмов) для получения возможности производить обработку большинства поверхностей этих изделий без изменения их пространственного положения в процессе обработки, при этом многократно повышая точность и производительность обработки при обеспечении заданного качества обработанных деталей.
Для практического решения данной проблемы требуется создание приводов координатных угловых и линейных перемещений, предназначенных обеспечить более чем десятикратное снижение дискретности перемещений при многократном повышении точности позиционирования исполнительных органов станков в совокупности с более чем десятикратным расширением диапазона контурных скоростей обработки (как в сторону уменьшения, так и в сторону увеличения численных значений скорости). А так же дающих возможность исключить люфты при изменении направления движения исполнительных органов станков, многократно повысить точность координатных угловых и линейных перемещений исполнительных органов станков и обеспечить высокую равномерность малых скоростей перемещений последних, а также повысить жесткость технологических систем станков в режиме "запирания" приводов координатных угловых и линейных перемещений исполнительных органов станков.
Практическое создание приводов координатных угловых и линейных перемещений исполнительных органов станков в настоящее время пытаются осуществить несколькими путями.
Один из путей решения указанной проблемы связан с использованием точных механических зубчатых передач в кинематических цепях указанных приводов, представляющих собой редукторы с различными видами зацепления.
Известные зубчатые передачи эвольвентного зацепления, в силу наличия в них трения скольжения между контактирующими зубчатыми поверхностями зацепляющихся колес, имеют низкий коэффициент полезного действия и присутствие релаксационных колебаний ведомого звена, что приводит к неравномерности малых скоростей перемещения исполнительных органов станков.
Кроме того, зубчатые передачи эвольвентного зацепления могут эксплуатироваться только при наличии бокового зазора в зубчатой передаче, что приводит к возникновению люфтов и гистерезиса при изменении направления вращения ведущего колеса относительно ведомого. Это приводит к невозможности обеспечить снижение дискретности перемещений исполнительных органов станков.
Таким образом, использование в кинематических цепях приводов координатных угловых и линейных перемещений исполнительных органов станков зубчатых передач эвольвентного зацепления с преимущественным трением скольжения между контактирующими поверхностями не позволяет обеспечить заданных технических требований, предъявляемых к указанным приводам.
Из теории зубчатых передач известны передачи с преимущественным трением качения в зубчатом зацеплении. К таким видам зацепления относится циклоидальное цевочное зацепление, которое требует особо точного изготовления зубчатых колес, профиль зубчатого венца которых образует гладкую эпициклическую поверхность.
Известен редуктор с циклоидальным зацеплением (рекламный проспект Getriebe und Motorgetriebe CYCLO Getriebeban Lorenz Braren GmbH фирмы CYCLO, ФРГ), содержащий корпус, в котором неподвижно закреплено солнечное колесо, выполненное в виде диска, в котором на внутренней цилиндрической поверхности выполнен ряд осесимметрично и равномерно расположенных пазов. В этих пазах с возможностью вращения вокруг своих продольных осей размещены ролики, выполняющие функции цевок. В указанном корпусе соосно его продольной оси симметрии установлен ведущий валик с двумя или тремя эксцентриковыми шейками. Эти шейки равномерно и осесимметрично расположены относительно продольной оси ведущего валика. Редуктор содержит сателлит, выполненный в виде двух или трех жестко связанных между собой зубчатых колес с эпициклоидальной формой зубьев, размещенных с возможностью вращения на соответствующих эксцентриковых шейках ведущего валика при одновременном циклоидальном зацеплении зубьев зубчатых колес с цевками неподвижного солнечного колеса. На торцах зубчатых колес выполнены отверстия, продольные оси которых параллельны продольной оси зубчатого колеса и диаметры которых равны между собой. В корпусе редуктора соосно продольным осям ведущего валика и солнечного колеса с возможностью вращения размещен ведомый валик с жестко закрепленным на нем диском. На торцевой поверхности этого диска равномерно и осесимметрично расположены пальцы, количество которых соответствует количеству отверстий, выполненных на торцевых поверхностях зубчатых колес. Продольные оси этих пальцев параллельны продольной оси ведомого валика, а их диаметры меньше диаметров соответствующих отверстий, выполненных на торцевых поверхностях зубчатых колес, на величину двойного эксцентриситета расположения эксцентриковых шеек по отношению к продольной оси ведущего валика. Каждый палей контактирует своей наружной цилиндрической поверхностью с внутренними цилиндрическими поверхностями упомянутых отверстий двух или трех зубчатых колес при одновременном циклоидальном зацеплении всех зубчатых колес с цевками неподвижного солнечного колеса. Сочетание пальцев, расположенных на диске ведомого валика, с отверстиями, выполненными на торцевых поверхностях зубчатых колес сателлита, представляет собой механизм параллельных кривошипов, который служит для передачи крутящего момента с зубчатых колес сателлита, расположенных эксцентрично относительно продольной оси ведущего валика, на ведомый валик, расположенный концентрично относительно продольной оси ведущего валика.
Однако в данном редукторе с циклоидальным зацеплением имеют место ниже перечисленные факторы, не позволяющие использовать его в приводах координатных перемещений прецизионных металлорежущих станков, а именно:
1. Повышенные отклонения профиля каждого отдельного зуба и совокупного расположения всех зубьев зубчатых колес сателлита по отношению к единственной гладкой замкнутой эпициклоидальной поверхности, конкретно учитывающей в каждом отдельном редукторе фактические размеры диаметров цевок, их радиальное расположение в солнечном колесе относительно продольной оси, а также фактическое расстояние между осью ведущего валика и осью расположенной на нем эксцентриковой шейки. Это обстоятельство исключает возможность одновременного зацепления всех цевок солнечного колеса со всеми зубьями зубчатых колес, что приводит к периодическому прерыванию непрерывности зацепления каждой отдельной цевки с профилями зубьев зубчатых колес, а также приводит к появлению повышенного трения скольжения между контактирующими при зацеплении поверхностями.
2. Наличие механизма параллельных кривошипов с дискретно-импульсным характером передачи крутящего момента от зубчатых колес сателлита на упругие пальцы диска ведомого валика, вызывает непостоянство передаточного отношения между ведущим и ведомым валиками в редукторе.
3. Требуется увеличение радиальных габаритных размеров редуктора относительно продольных осей ведущего и ведомого валиков при передаточных отношениях 1:100; 1:1000; 1:10000 из-за увеличения количества зубьев на зубчатом венце, что исключает их использование в малогабаритных приводах координатных перемещений металлорежущих станков.
Известен редуктор с циклоидальным зацеплением (рекламный проспект TECHNICAL PRESENTATION FOR NEW MODEL RV-A фирмы TEIJINSEIKI, Япония), содержащий корпус, выполненный в виде двух параллельно расположенных дисков с центральными отверстиями. Диски корпуса жестко скреплены между собой равномерно и осесимметрично расположенными относительно осей отверстий дисков тремя перемычками, образующими пространство между торцами дисков корпуса. На периферии дисков корпуса с возможностью вращения относительно осей их отверстий установлено солнечное колесо в виде диска с центральным отверстием. На внутренней цилиндрической поверхности отверстия солнечного колеса равномерно и осесимметрично относительно его продольной оси размещены ролики, выполняющие функции цевок. На торцевых поверхностях упомянутых дисков корпуса равномерно и осесимметрично относительно осей их отверстий с возможностью вращения размещены три валика с эксцентричными шейками, имеющими на каждом валике одинаковую величину эксцентриситета между осью вращения валика и осью эксцентриковой шейки. С наружной стороны одного из дисков корпуса на свободном конце каждого валика жестко закреплены зубчатые колеса с эвольвентным профилем зубьев. В пространстве между внутренними торцевыми поверхностями дисков корпуса с возможностью плоскопараллельного перемещения размещен сателлит, выполненный в виде зубчатого колеса с эпициклоидальным профилем зубьев, имеющий центральное отверстие, три отверстия для размещения в них упомянутых трех перемычек корпуса, а также три отверстия для размещения в них упомянутых трех эксцентричных шеек валиков на подшипниках качения. В качестве ведущего валика используется зубчатое колесо эвольвентного зацепления, консольно закрепленное на валу приводного механизма. Это зубчатое колесо размещено в центральном отверстии корпуса и зацепляется одновременно с тремя упомянутыми зубчатыми колесами, жестко связанными с эксцентричными шейками.
Однако в данном редукторе с циклоидальным зацеплением имеют место следующие факторы, не позволяющие использовать его в приводах координатных перемещений металлорежущих станков, а именно:
1. Вследствие невозможности идентичного выполнения величины эксцентриситета на трех упомянутых валиках с эксцентричными шейками, а также вследствие наличия кинематической погрешности в эвольвентном зацеплении между зубчатым колесом ведущего валика одновременно с тремя зубчатыми колесами, жестко связанными с валиками, исключается возможность одновременного зацепления всех цевок солнечного колеса со всеми зубьями зубчатого колеса. Это приводит к периодическому прерыванию непрерывности зацепления каждой отдельной цевки солнечного колеса с профилями зубьев зубчатых колес, а также приводит к появлению повышенного трения скольжения между контактирующими в циклоидальном зацеплении поверхностями.
2. Требуется увеличение радиальных габаритных размеров редуктора относительно продольных осей ведущего и ведомого валиков при передаточных отношениях 1:100; 1:1000; 1:10000 из-за увеличения количества зубьев на зубчатом венце, что исключает их использование в малогабаритных приводах координатных перемещений металлорежущих станков.
Кроме того, достигнутый в настоящее время технологический уровень точности изготовления отдельных составных звеньев размерной цепи редукторов с одним планетарным рядом обеспечивает заданные экономические показатели работы таких редукторов при условии, когда коэффициент многопарности одновременного зацепления равен 0,6. В этом случае циклоидальное зацепление в одноступенчатых редукторах обеспечивается за счет прерывания контакта отдельных цевок солнечного колеса с профилями зубьев зубчатого колеса в момент возникновения наибольшей погрешности взаимного расположения всех цевок солнечного колеса относительно всех зубьев зубчатого колеса.
При этом в каждый данный момент времени работы редуктора отношение числа цевок, не находящихся в контакте с зубчатой поверхностью зубчатого колеса, к общему числу цевок солнечного колеса не должно превышать 0,4. В противном случае произойдет заклинивание в циклоидальном зацеплении редуктора из-за повышенного трения скольжения между контактирующими поверхностями.
Повышение коэффициента многопарности одновременного циклоидального зацепления, а следовательно, и снижение трения скольжения между контактирующими поверхностями, осуществимо только при условии повышения точности изготовления отдельных составных звеньев размерной цепи редуктора, что невозможно добиться, так как нет технологии зубонарезания, исключающей внутришаговую и накопленную погрешности. В связи с этим в таких редукторах невозможно достичь коэффициента многопарности зацепления равного единице.
Известен редуктор с циклоидальным зацеплением, описанный в рекламном проспекте института проблем надежности и долговечности машин АН БССР в 1988 г. (220732, г. Минск, ул. Ф. Скорины, 12) и взятый нами за прототип.
Этот редуктор содержит корпус, в котором неподвижно закреплено первое солнечное колесо, выполненное в виде диска с рядом осесимметрично и равномерно расположенных по окружности цевок. В упомянутом корпусе с возможностью вращения соосно друг другу и оси симметрии первого неподвижного солнечного колеса установлены ведущий валик с эксцентриковой шейкой и ведомый валик с жестко закрепленным на нем вторым солнечным колесом. Это второе подвижное солнечное колесо выполнено в виде диска, установленного соосно оси вращения ведомого валика и имеющего ряд равномерно и осесимметрично расположенных по его окружности цевок. Цевки выполнены в виде полых роликов, размещенных с возможностью вращения на пальцах, торцы которых жестко закреплены соответственно на первом и втором солнечных колесах. При этом редуктор содержит сателлит, выполненный в виде двух жестко связанных зубчатых колес с коррегированной эпициклоидальной формой зубьев, размещенный с возможностью вращения на эксцентриковой шейке ведущего валика при одновременном циклоидальном зацеплении зубьев первого зубчатого колеса с цевками неподвижного солнечного колеса, а зубьев второго зубчатого колеса с цевками подвижного солнечного колеса. Сателлит, обкатываясь первым зубчатым колесом по неподвижному солнечному колесу, совершает сложное плоскопараллельное (планетарное) движение, которое благодаря второму планетарному ряду, образованному вторым зубчатым колесом и подвижным солнечным колесом, преобразуется во вращательное движение ведомого валика.
По сравнению с описанными выше редукторами с циклоидальным зацеплением фирмы CYCLO (ФРГ) и фирмы Teijin Seiki (Япония) данный редуктор имеет при одинаковых массогабаритных характеристиках более высокое редуцирование (от 1: 7 до 1: 5000), более высокую кинематическую точность (от 1 до 5 угловых минут); более высокий коэффициент полезного действия (от 91 до 95%); более высокий коэффициент многопарности зацепления (от 0,65 до 0,95); более низкую материалоемкость (от 0,02 до 0,05 кг на единицу передаваемого крутящего момента, измеренного в Нм). Данный редуктор с циклоидальным зацеплением в большей степени, чем другие редукторы с циклоидальным зацеплением, соответствует требованиям приводов координатных перемещений металлорежущих станков.
Однако наличие коррегированной эпициклоидальной формы на каждом отдельном зубе в совокупности всех зубьев образует на соответствующих зубчатых колесах поверхности, существенно отличающиеся от тех единственных гладких замкнутых эпициклических поверхностей, параметры которых конкретно учитывают в каждом планетарном ряду редуктора фактические размеры диаметров цевок, их радиальное расположение в неподвижном и подвижном солнечных колесах относительно их продольных осей, а также фактическую величину эксцентриситета между осью вращения ведущего валика и осью расположенной на нем эксцентриковой шейки.
Как показали исследования, промышленная реализация указанного конструктивного выполнения редуктора с двумя параллельными планетарными рядами возможна при условии обеспечения коэффициента многопарности одновременного зацепления не ниже 0,65 в каждом планетарном ряду. То есть при условии более высокой точности изготовления отдельных составных звеньев размерной цепи в каждом планетарном ряду редуктора.
Для этого в данном редукторе используются зубчатые поверхности обоих зубчатых колес в качестве элементов, компенсирующих погрешность изготовления отдельных составных звеньев размерной цепи в каждом планетарном ряду конкретного редуктора за счет коррегирования эпициклоидальной формы на каждом отдельном зубе в обоих зубчатых колесах.
Однако коррегирование эпициклоидальной формы поверхности каждого отдельного зуба приводит к тому, что в целом вся зубчатая поверхность зубчатого колеса оказывается "сшитой" из отдельных кусков и представляет собой кусочно-гладкую поверхность с наличием на ней внутришаговой и накопленной погрешностей расположения профилей отдельных зубьев, при этом для исключения интерференции эти дополнительные угловые погрешности зубьев также компенсируются за счет соответствующего коррегирования эпициклоидальной формы поверхности на каждом отдельном зубе в обоих зубчатых колесах.
Таким образом, незамкнутость кусочно-гладкой зубчатой поверхности в целом на каждом зубчатом колесе при наличии коррегированной эпициклоидальной формы поверхности на каждом отдельном зубе в лучшем случае позволяет в известном редукторе с двумя параллельными планетарными рядами выполнить условие циклоидального зацепления с коэффициентом многопарности, равным 0,95, и как следствие этого в таком редукторе всегда будут иметь место трение скольжения, люфты и гистерезис.
Все вышеперечисленные факторы не позволяют применить известную конструкцию редуктора с циклоидальным зацеплением с двумя параллельными планетарными рядами в приводах координатных перемещений особо прецизионных металлорежущих станков типа "обрабатывающий центр" с широкими технологическими возможностями, отвечающими перспективным требованиям.
В основу настоящего изобретения поставлена задача создать редуктор с циклоидальным зацеплением с таким профилем зубчатого венца каждого зубчатого колеса и таким конструктивным выполнением соответствующего солнечного колеса, которые позволили бы полностью компенсировать погрешности изготовления отдельных составных звеньев в каждом планетарном ряду, учесть фактические величины: эксцентриситета "e" между осью эксцентриковой шейки и продольной осью ведущего валика, радиуса кривизны цевок и радиусов расположения цевок по окружностям неподвижного и подвижного солнечных колес, компенсировать отклонения фактического углового расположения цевок от осесимметричности в соответствующих колесах, а также исключить трение скольжения, люфты и гистерезис в циклоидальном зацеплении одновременно в двух параллельных планетарных рядах при эксплуатации редуктора, чем обеспечить создание коэффициента многопарности циклоидального зацепления, равного единице, что дало бы возможность применять такие редукторы в приводах координатных перемещений особопрецизионных металлорежущих станков типа "обрабатывающий центр" с широкими технологическими возможностями, отвечающими перспективным требованиям.
Эта задача решена созданием редуктора с циклоидальным зацеплением, содержащего корпус, в котором неподвижно закреплено первое солнечное колесо, соосно которому с возможностью вращения установлены ведущий валик, на эксцентриковой шейке которого с возможностью вращения размещен сателлит, и ведомый валик с жестко закрепленным на нем вторым солнечным колесом, при этом солнечные колеса выполнены в виде дисков, на обращенных друг к другу торцах которых осесимметрично и равномерно расположены цевки, а сателлит выполнен в виде двух жестко связанных зубчатых колес с эпициклоидальной формой зубьев, находящихся в циклоидальном зацеплении, соответственно зубьев первого зубчатого колеса с цевками первого солнечного колеса, а зубьев второго зубчатого колеса с цевками второго солнечного колеса, при этом согласно изобретению цевки размещены на соответствующих солнечных колесах с возможностью упругой самоустановки и представляют собой наружные кольца подшипников качения, внутренние кольца которых жестко закреплены на свободных концах пальцев, консольно закрепленных на соответствующих торцах соответствующих солнечных колес, а поверхность зубчатого венца каждого зубчатого колеса образована направляющей, представляющей собой замкнутую эпициклическую линию, при этом каждая цевка первого солнечного колеса с заданным предварительным натягом находится в непрерывном контакте в режиме трения качения с первым зубчатым колесом.
При этом каждая цевка второго солнечного колеса с заданным предварительным натягом может находиться в непрерывном контакте в режиме трения качения со вторым зубчатым колесом или каждая цевка второго солнечного колеса с заданным предварительным натягом может находиться в последовательном контакте в режиме трения качения со вторым зубчатым колесом.
Создание указанной конструкции редуктора основано на использовании в качестве эталонных баз гладких замкнутых эпициклических поверхностей зубчатых венцов на соответствующих зубчатых колесах в сочетании с указанным закреплением на соответствующих солнечных колесах цевок, выполненных в виде подшипников качения, установленных свободно с заданным предварительным натягом, которые позволяют осуществлять компенсацию влияния на кинематическую точность редуктора погрешностей изготовления его составных звеньев путем непрерывного усреднения между всеми цевками каждой отдельной погрешности.
В результате этого обеспечивается работоспособность редуктора с исключением интерференции при одновременном циклоидальном зацеплении в двух параллельных планетарных рядах даже при наличии отклонений от равномерности и осесимметричности расположения цевок и тем самым обеспечивается коэффициент многопарности зацепления, равный единице. Все эти конструктивные особенности позволяют исключить трение скольжения, люфты и гистерезис при работе редуктора, который может быть эффективно использован в приводах координатных перемещений особопрецизионных металлорежущих станков типа "обрабатывающий центр" с широкими технологическими возможностями, отвечающими перспективным требованиям.
Для повышения точности обработки сложных поверхностей на металлорежущем станке бывает нужно снизить пропорционально числу 10 дискретность минимальных перемещений исполнительных органов этого станка на единицу управляющего импульса от системы числового программного управления. В этом случае передаточное отношение в редукторе с циклоидальным зацеплением, используемым в приводах координатных перемещений этого станка, также должно быть кратным числу 10 (то есть 1:100; 1:1000; 1:10000; 1:100000).
Целесообразно, чтобы в редукторе с циклоидальным зацеплением с двумя параллельными планетарными рядами каждый палец был выполнен в виде втулки.
Каждая из этих втулок позволяет на свободном конце пальца с заданным предварительным натягом с двумя степенями свободы относительно торцевой поверхности солнечного колеса упруго установить каждую отдельную цевку в виде подшипника качения, обеспечить самоустановку в полном контакте всех цевок каждого солнечного колеса по гладкой замкнутой эпициклической поверхности соответствующего зубчатого венца, усреднить между всеми цевками погрешность расположения места закрепления конца каждого отдельного пальца относительно номинально заданного его расположения в торцевой плоскости соответствующего солнечного колеса и тем самым повысить кинематическую точность зубчатой передачи в целом.
Желательно в каждой втулке между торцом соответствующего солнечного колеса и торцом подшипника качения разместить шарнир, обеспечивающий две степени свободы поворота свободного конца втулки относительно места ее закрепления на солнечном колесе.
Наличие такого шарнира позволит дополнительно компенсировать влияние на кинематическую точность зубчатой передачи непараллельности оси закрепленного конца каждого отдельного пальца по отношению к продольной оси соответствующего солнечного колеса.
Благоприятно, чтобы каждый шарнир обеспечивал дополнительно три степени свободы перемещения свободного конца втулки относительно места ее закрепления на солнечном колесе. При этом желательно, чтобы каждый шарнир представлял собой по меньшей мере одну пружинную шайбу, образованную прорезями, выполненными перпендикулярно продольной оси свободного конца втулки, при этом на каждой торцевой поверхности пружинной шайбы размещены по два диаметрально противоположных выступа, и ось выступов, размещенных на одной торцевой стороне пружинной шайбы, повернута на угол приблизительно 90o относительно оси выступов, размещенных на другой ее стороне.
Это позволит повысить осевую податливость свободного конца пальца относительно закрепленного его конца и скомпенсировать влияние на кинематическую точность зубчатой передачи осевых смещений свободного конца каждого отдельного пальца при изменении его углового расположения по отношению к закрепленному концу в процессе работы редуктора.
Возможно внутреннюю поверхность наружного кольца каждого подшипника качения выполнить сферической и установить относительно его тел качения с возможностью разворота на угол от 1 до 90o.
Это обеспечивает линейный контакт между цевкой и зубчатым венцом по образующей, принадлежащей как боковой поверхности цевки, так и боковой эпициклической поверхности зубчатого колеса, и в еще большей мере снизит влияние на кинематическую точность зубчатой передачи погрешностей, вызванных угловыми и осевыми смещениями свободного конца каждого пальца относительно закрепленного его конца в процессе работы редуктора.
Целесообразно, чтобы первое солнечное колесо имело на один палец с цевкой больше, чем второе солнечное колесо, при этом второе зубчатое колесо имело количество зубьев, равное количеству зубьев второго солнечного колеса, а первое зубчатое колесо имело на один зуб меньше, чем количество цевок первого солнечного колеса.
Это позволяет выполнить редуктор с минимальными радиальными размерами, но с более высокими передаточными отношениями, что дает возможность использовать такой редуктор в приводах координатных перемещений в малогабаритных особопрецизионных металлорежущих станках.
Целесообразно, чтобы первое солнечное колесо имело на один палец с цевкой меньше, чем второе солнечное колесо, при этом зубчатые колеса имели на один зуб меньше, чем количество цевок зацепляющихся с ними соответствующих солнечных колес. Это дает возможность создать редуктор с циклоидальным зацеплением, имеющий передаточное отношение, равное 1:100, для более эффективного управления приводами координатных перемещений исполнительных органов станка от системы числового программного управления.
Таким образом, решается задача создания редуктора с циклоидальным зацеплением с таким профилем зубчатого венца каждого зубчатого колеса и таким конструктивным выполнением соответствующего солнечного колеса, которые позволяют полностью компенсировать погрешности изготовления отдельных составных звеньев в каждом планетарном ряду, учитывают фактические величины: эксцентриситета "e" между осью эксцентриковой шейки и продольной осью ведущего валика, радиусы кривизны цевок и радиус расположения цевок по окружностям неподвижного и подвижного солнечных колес, компенсируют отклонения фактического углового расположения цевок от осесимметричности в соответствующих солнечных колесах, а также исключают трение скольжения, люфты и гистерезис в циклоидальном зацеплении одновременно в двух параллельных планетарных рядах в процессе эксплуатации редуктора, тем самым обеспечивают создание коэффициента многопарности циклоидального зацепления, равного единице. Это дает возможность применять такие редукторы в приводах координатных перемещений особопрецизионных металлорежущих станков типа "обрабатывающий центр" с широкими технологическими возможностями, отвечающими перспективным требованиям.
Для лучшего понимания изобретения ниже приведены конкретные примеры его выполнения со ссылками на прилагаемые чертежи, на которых:
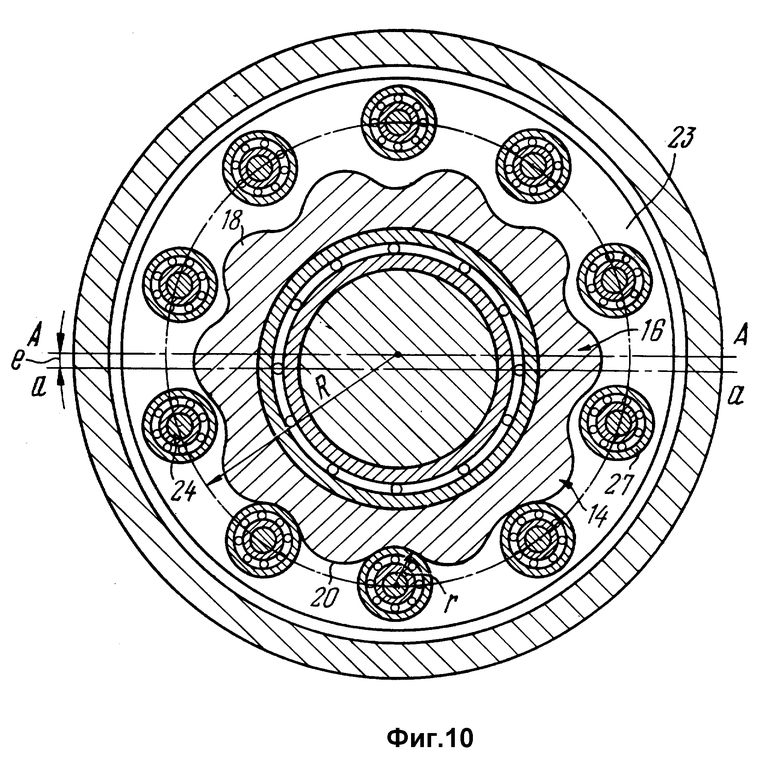
фиг. 1 схематично изображает редуктор, выполненный согласно изобретению, вид сбоку в разрезе с вырывом;
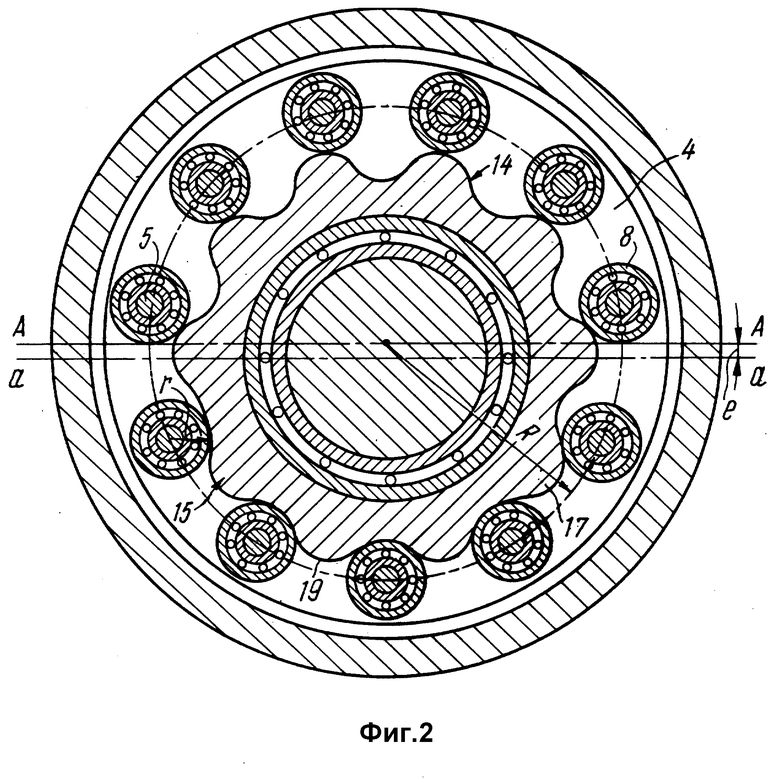
фиг. 2 - сечение II-II на фиг. 1 в одном варианте выполнения редуктора согласно изобретению;
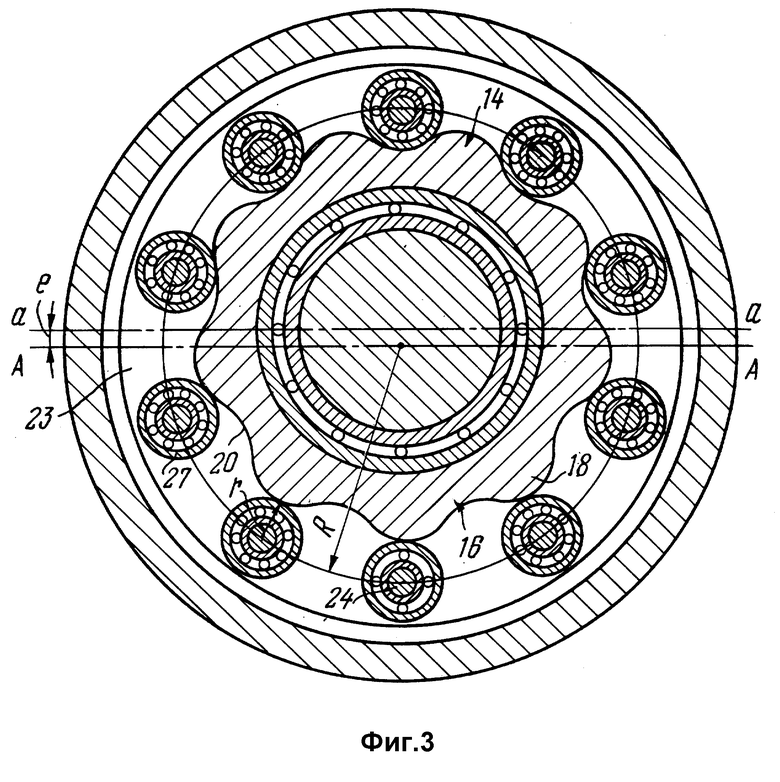
фиг. 3 - сечение III-III на фиг. 1;
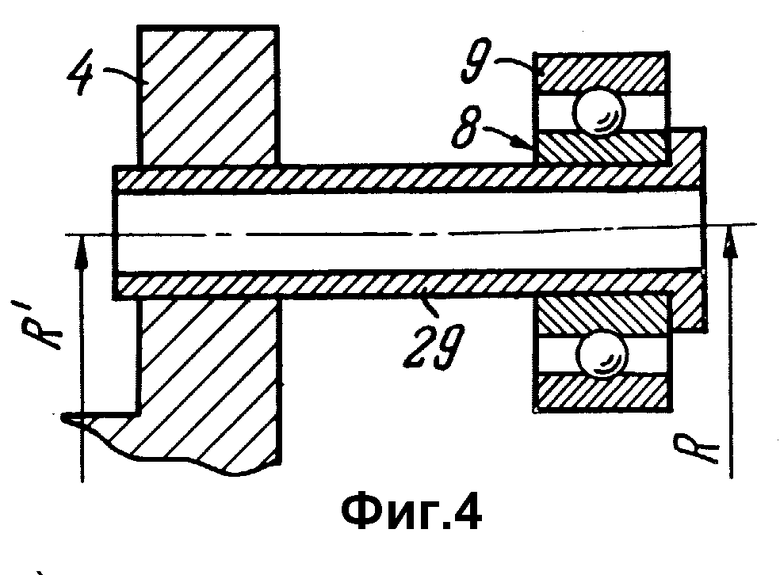
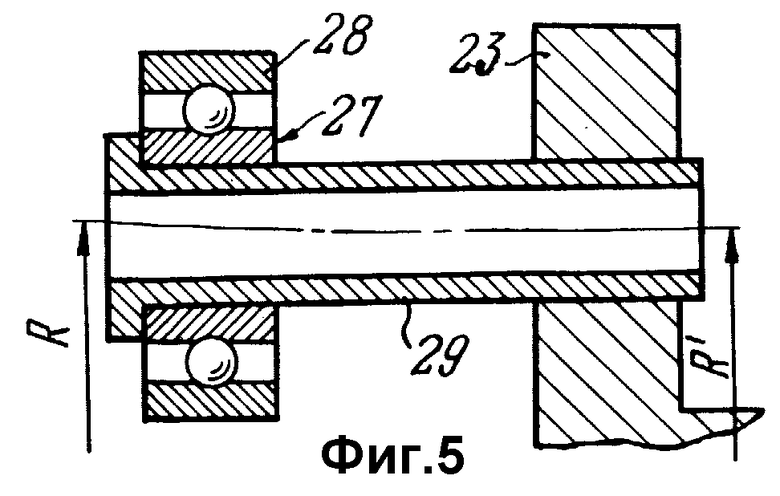
фиг. 4, 5 - варианты выполнения пальца в виде втулки с подшипником согласно изобретению, вид сбоку, продольный разрез;
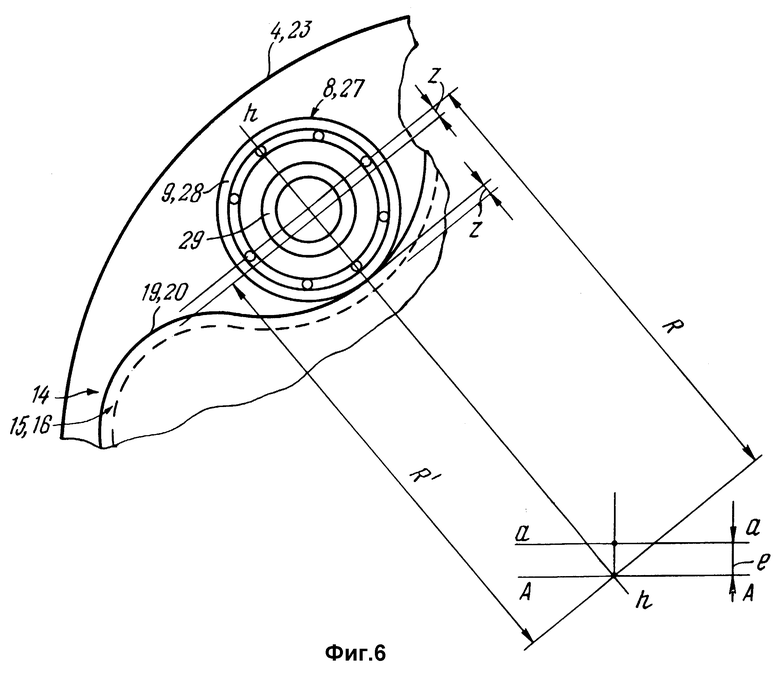
фиг. 6 - цевка в контакте с зубчатым колесом согласно изобретению;
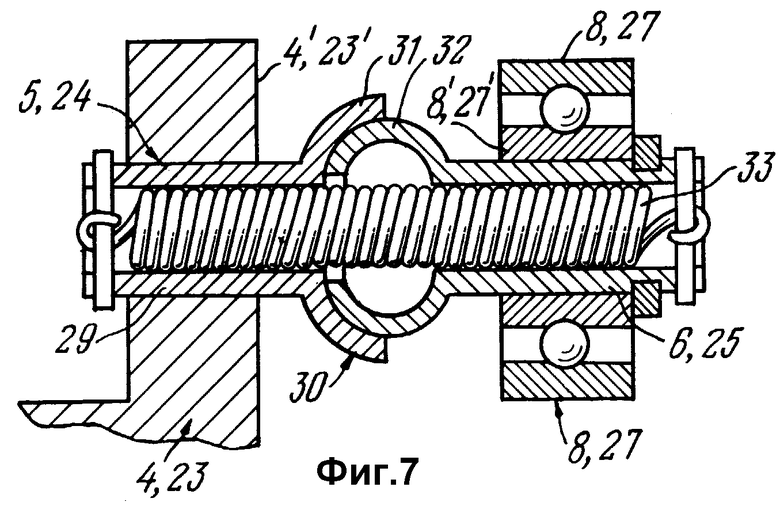
фиг. 7 - вариант выполнения пальца с шарниром согласно изобретению, вид сбоку, продольный разрез;
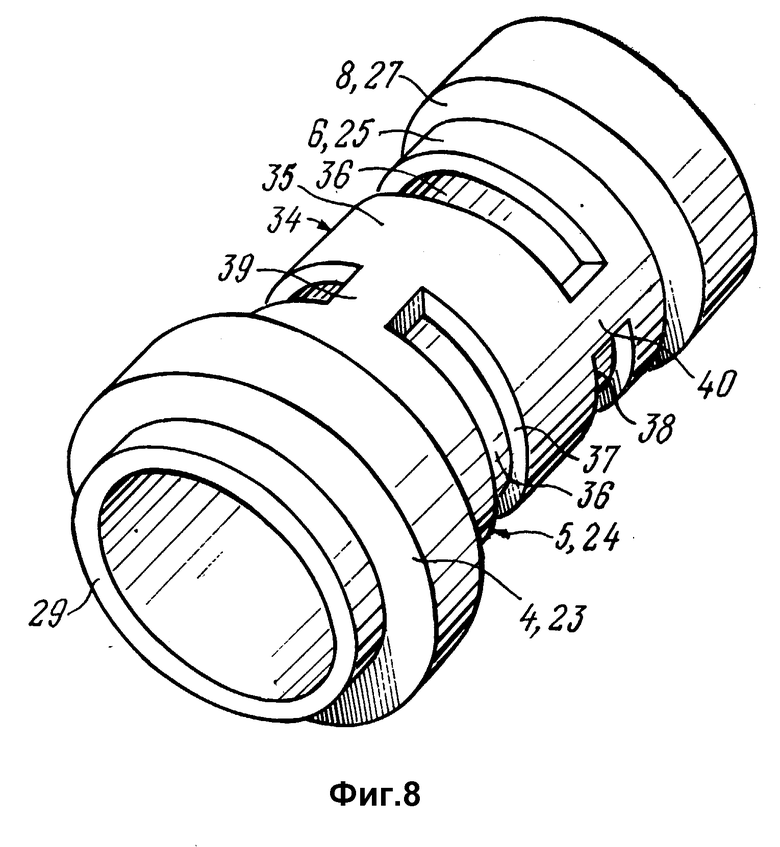
фиг. 8 - вариант выполнения пальца с шарниром в виде пружинной шайбы согласно изобретению, изометрия;
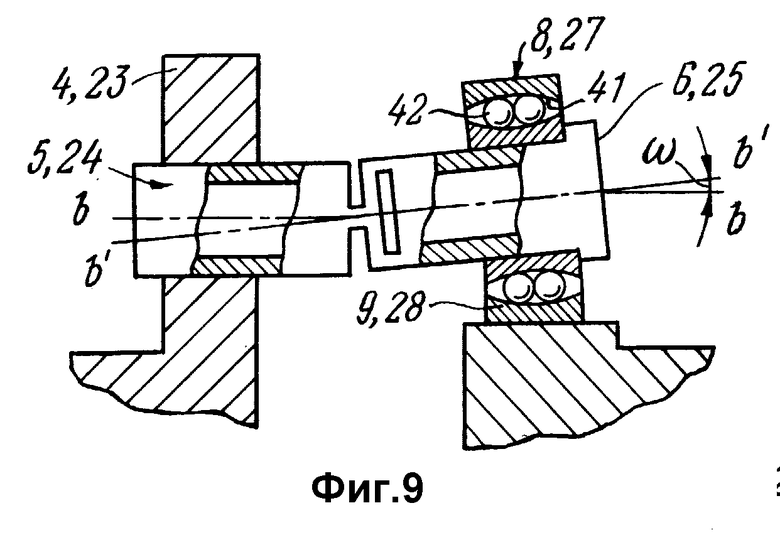
фиг. 9 - вариант выполнения пальца с шарниром в виде пружинной шайбы и самоустанавливающейся цевкой согласно изобретению, продольный разрез с вырывами;
фиг. 10 - сечение X-X на фиг. 1 в другом варианте выполнения редуктора согласно изобретению.
Редуктор с циклоидальным зацеплением, выполненный согласно изобретению, содержит корпус 1 (фиг. 1), состоящий из двух жестко соединенных частей 2, 3. В первой части 2 корпуса 1 неподвижно закреплено первое солнечное колесо 4. На этом солнечном колесе 4 консольно жестко осесимметрично и равномерно на радиусе R' параллельно между собой и продольной оси A-A этого солнечного колеса 4 закреплены пальцы 5. На свободных концах 6 пальцев 5 неподвижно закреплены внутренние кольца 7 подшипников 8 качения, наружные кольца 9 которых выполняют функции цевок, имеющих радиус наружной поверхности, равный r. В этой же части 2 корпуса 1, опираясь на два подшипника 10, соосно продольной оси A-A неподвижного первого солнечного колеса 4 установлен ведущий валик 11 с эксцентриковой шейкой 12, продольная ось a-a которой расположена относительно продольной оси A-A, соответствующей оси вращения ведущего валика 11, с эксцентриситетом "e". На эксцентриковой шейке 12 на двух подшипниках 13 установлен сателлит 14, выполненный в виде двух жестко связанных между собой зубчатых колес 15 и 16 с эпициклоидальными профилями зубьев 17 и зубьев 18 на зубчатых венцах 19 и 20 (фиг. 2, 3) каждого соответствующего зубчатого колеса 15 и 16.
Поверхность зубчатого венца 19 и 20 (фиг. 3) каждого зубчатого колеса 15 и 16 (фиг. 2, 3) образована направляющей, представляющей собой замкнутую эпициклическую линию. То есть эти поверхности представляют собой гладкие замкнутые эпициклические поверхности, которые являются эталонными базами в циклоидальном зацеплении.
Выполнение каждой указанной эталонной базовой гладкой замкнутой эпициклической поверхности зубчатого венца 19, 20 на каждом зубчатом колесе 15, 16 возможно путем использования способа обработки цилиндрических зубчатых колес, который обеспечивает выполнение каждого зубчатого колеса путем непрерывной по мере удаления припуска имитации заданных условий эксплуатации циклоидной передачи в каждом планетарном ряду, а также путем непрерывного контроля радиальных размерных параметров профиля обрабатываемой зубчатой поверхности каждого зубчатого колеса при его изготовлении с получением профиля с точными заданными размерами, учитывающими фактическую величину эксцентриситета между осью эксцентриковой шейки и осью вращения ведущего валика, величину радиуса кривизны цилиндрических поверхностей цевок, величину радиального расположения цевок по окружности соответствующего солнечного колеса, а также заданную величину предварительного натяга между контактирующими при зацеплении поверхностями. Более подробно со способом обработки цилиндрических зубчатых колес можно ознакомиться в Российском патенте N 1695595 и в заявке PCT/RU-94/00059 от 24.03.1994 г.
Во второй части 3 (фиг. 1) корпуса 1, опираясь на два подшипника 21 соосно оси A-A вращения ведущего валика 11, установлен ведомый валик 22. На ведомом валике 22 неподвижно закреплено второе солнечное колесо 23, установленное соосно продольной оси A-A первого солнечного колеса 4, оси A-A вращения ведущего валика 11 и оси вращения A-A ведомого валика 22. На втором солнечном колесе 23 консольно жестко осесимметрично и равномерно на радиусе R' (равном радиусу R' первого солнечного колеса 4) параллельно между собой и продольной оси A-A этого солнечного колеса 23 закреплены пальцы 24. На свободных концах 25 пальцев 24 неподвижно закреплены внутренние кольца 26 подшипников 27 качения, наружные кольца 28 которых выполняют функции цевок второго солнечного колеса 23, имеющих радиус наружной поверхности, равный r и равный радиусу r наружной поверхности цевок первого солнечного колеса 4.
Все наружные кольца 9, 28 (то есть цевки) подшипников 8, 27 качения, установленные на пальцах 5, 24 соответственно первого и второго солнечных колес 4, 23, находятся в непрерывном контакте c соответствующими зубчатыми венцами 19 и 20 (фиг. 2, 3), имеющими эпициклоидальные профили зубьев 17, 18 зубчатых колес 15, 16 сателлита 14.
В редукторе с циклоидальным зацеплением с двумя параллельными планетарными рядами пальцы первого и второго солнечных колес 4, 23 (фиг. 4, 5) можно выполнить в виде втулок 29. Причем радиус R' места закрепления каждой отдельной втулки 29 на торцевых поверхностях дисков соответствующих солнечных колес 4, 23 всегда меньше номинального значения радиуса R расположения соответствующих цевок (наружных колец 9, 28 подшипников 8, 27) на величину предварительного натяга Z (фиг. 6) в направлении по нормали n-n между контактирующими при циклоидальном зацеплении эталонными поверхностями зубчатых венцов 19, 20 зубчатых колес 15, 16 сателлита 14 с наружными поверхностями наружных колец 9, 28 подшипников 8, 27 качения (цевок). Предварительный натяг Z определяется расстоянием между эталонными поверхностями зубчатых венцов 19, 20 зубчатых колес 15, 16 сателлита 14 и мнимыми эквидистантными эталонными поверхностями, с которыми контактировали бы наружные поверхности наружных колец 9, 28 подшипников 8, 27 качения при условии, если величина R' равнялась бы величине R.
В каждом пальце 5, 24 (фиг. 7), выполненном в виде втулки 29, между торцoм 4', 23' диска соответствующего солнечного колеса 4, 23 и торцoм 8', 27' подшипника 8, 27 качения можно разместить шарнир 30, обеспечивающий две степени свободы поворота свободного конца 6, 25 пальца 5, 24 относительно места его закрепления на солнечном колесе 4, 23. При этом шарнир 30 имеет две полусферы 31, 32 с центральными отверстиями, соосными и равными отверстию втулки, вставленных одна в другую. Полусферы 31, 32 упруго соединены между собой посредством пружины 33 растяжения, вставленной в отверстия втулки 29 и отверстия полусфер 31, 32.
В каждом пальце 5, 24 (фиг. 8), выполненном в виде втулки 29, между торцoм диска соответствующего солнечного колеса 4, 23 и торцoм подшипника 8, 27 качения можно разместить шарнир 34, обеспечивающий две степени свободы поворота и три степени свободы перемещения свободного конца 6, 25 пальца 5, 24 относительно места его закрепления на соответствующем солнечном колесе 4, 23. При этом каждый шарнир 34 может быть выполнен в виде по меньшей мере одной пружинной шайбы 325, образованной прорезями 36, выполненными перпендикулярно оси свободного конца 6, 25 пальца 5, 24. На каждой торцевой поверхности 37, 38 пружинной шайбы 35 размещены по два диаметрально противоположных выступа 39, 40.
При этом ось выступов 39, размещенных на одной торцевой стороне 37 пружинной шайбы 35 повернута на угол приблизительно 90o по отношению к оси выступов 40, размещенных на другой торцевой стороне 38 пружинной шайбы 35.
Для устранения возможного перекоса закрепления пальцев 5, 24 (фиг. 9) в соответствующих солнечных колесах 4, 23 относительно заданной оси b-b их закрепления возможно внутреннюю поверхность 41 наружного кольца 9, 28 подшипника 8, 27 качения выполнить сферической и установить ее на телах 42 качения с возможностью разворота оси b'-b' свободного конца 6, 25 каждого пальца 5, 24 относительно заданной оси b-b на угол w, который может колебаться от 1 до 90o.
На одном из солнечных колес 4 (фиг. 2) количество пальцев 5 с подшипниками 8 качения можно выполнить на один больше, чем в другом солнечном колесе 23. При этом возможно выполнить на один палец 24 (фиг. 3) с подшипником 27 качения меньше в подвижном солнечном колесе 23. При этом зацепляющееся с подвижным солнечным колесом 23 зубчатое колесо 16 сателлита 14 может иметь количество зубьев 18 зубчатого венца 20 на единицу меньше, чем количество пальцев 24 с подшипниками 27 качения подвижного солнечного колеса 23. В данном случае каждая отдельная цевка подвижного и неподвижного солнечных колес 4, 23 (фиг. 2, 3) с заданным предварительным натягом будет находиться в непрерывном контакте в режиме трения качения с соответствующим зубчатым колесом 15, 16.
Также возможно выполнить на один палец 5 (фиг. 2) с подшипником 8 качения больше на неподвижном солнечном колесе 4. При этом зацепляющееся с подвижным солнечным колесом 23 (фиг. 10) зубчатое колесо 16 сателлита 14 должно иметь количество зубьев 18 зубчатого венца 20, равное количеству пальцев 24 с подшипниками 27 качения подвижного солнечного колеса 23.
В данном случае каждая отдельная цевка неподвижного солнечного колеса 4 с заданным предварительным натягом находится в непрерывном контакте в режиме трения качения с соответствующим зубчатым колесом 15, а каждая отдельная цевка подвижного солнечного колеса 23 с заданным предварительным натягом находится в последовательном контакте в режиме трения качения с соответствующим зубчатым колесом 16, поверхность зубчатого венца 17, 18 каждого из которых образована направляющей, представляющей собой замкнутую эпициклическую линию.
Предлагаемый редуктор с циклоидальным зацеплением работает следующим образом.
Вращение от вала приводного двигателя (на чертежах не показанного) передается ведущему валику 11 с эксцентриковой шейкой 12. Вращаясь на подшипниках 10 относительно левой части 2 корпуса 1 и ведомого валика 22, ведущий валик 11 сообщает плоскопараллельное движение по окружности эксцентриковой шейке 12, подшипнику 13 и сателлиту 14 вместе с зубчатыми колесами 15 и 16.
В связи с тем, что радиус R' места закрепления каждого пальца 5 неподвижного солнечного колеса 4 и каждого пальца 24 подвижного солнечного колеса 23 меньше номинального значения R, определяющего эталонные профили гладких замкнутых эпициклоидальных поверхностей зубьев 17, 18 зубчатых венцов 19, 20 зубчатых колес 15, 16, то еще до начала плоскопараллельного движения сателлита 14 по круговой траектории все цевки (в виде наружных колец 9 подшипников 8 качения) неподвижного солнечного колеса 4 будут с заданным предварительным натягом Z=R-R' контактировать с зубчатым венцом 19 соответствующего зубчатого колеса 15, а все цевки (в виде наружных колец 28 подшипников 27 качения) подвижного солнечного колеса 23 будут с таким же предварительным натягом Z=R-R' контактировать с зубчатым венцом 20 соответствующего зубчатого колеса 16. Причем действие предварительного натяга Z в обоих случаях направлено в сторону центра соответствующих солнечных колес 4, 23.
Наличие постоянного предварительного натяга Z одновременно всех цевок каждого солнечного колеса 4, 23 с зубчатыми венцами 19, 20 каждого соответствующего зубчатого колеса 15, 16, а также возможность самоустановки цевок за счет свободной изгибной жесткости свободных концов 6, 25 пальцев 5, 24 относительно мест их закрепления на торцевых поверхностях дисков солнечных колес 4, 23 позволяют при плоскопараллельном перемещении сателлита 14 по круговой траектории относительно центра, совпадающего с осью симметрии наружных колец 9 подшипников 8 качения неподвижного солнечного колеса 4, обкатывать зубья 17 зубчатого колеса 15 по наружным кольцам 9 подшипников 8 качения солнечного колеса 4.
Это происходит в связи с возможностью обката без проскальзывания наружной поверхности центроиды эталонной эпициклической гладкой замкнутой поверхности зубьев 17 зубчатого венца 19, диаметр который (центроиды) определяется произведением двойного эксцентриситета "e" на число зубьев 17 зубчатого колеса 15, по внутренней поверхности неподвижной центроиды, диаметр которой определяется произведением двойного эксцентриситета "e" на число цевок неподвижного солнечного колеса 4. Обкат указанной наружной поверхности центроиды по указанной внутренней поверхности центроиды вызывает вращение зубчатого колеса 15 на подшипниках 13 в сторону, противоположную направлению вращения ведущего валика 11, с передаточным отношением, равным единице, деленной на число зубьев зубчатого колеса 15.
В свою очередь сателлит 14, обкатываясь зубчатым колесом 15 по неподвижному солнечному колесу 4, совершает сложное плоскопараллельное (планетарное) движение, которое благодаря второму планетарному ряду, образованному зубчатым венцом 20 зубчатого колеса 16, имеющего гладкую замкнутую эпициклическую поверхность зубьев 18, и цевками в виде наружных колец 28 подшипников 27 качения подвижного солнечного колеса 23, преобразуется во вращательное движение ведомого валика 22. При этом по наружной поверхности центроиды, связанной с эталонной эпициклической поверхностью зубьев 18 зубчатого колеса 16, диаметр которой равен произведению двойного эксцентриситета "e" на число зубьев 18 зубчатого колеса 16, обкатывается без проскальзывания внутренняя поверхность центроиды, диаметр которой равен произведению двойного эксцентриситета "e" на число цевок подвижного солнечного колеса 23. Обкат указанной внутренней поверхности центроиды по указанной наружной поверхности центроиды вызывает вращение подвижного солнечного колеса 23 вместе с выходным валиком 22 на подшипниках 21 относительно второй части 3 корпуса 1.
При этом непрерывный обкат упомянутых центроид одновременно в двух параллельных планетарных рядах вызывает, с одной стороны, непрерывный обкат без проскальзывания эталонной эпициклической гладкой поверхности зубьев 17 зубчатого венца 19 зубчатого колеса 15 по наружным кольцам 9 подшипников 8 качения неподвижного солнечного колеса 4, а, с другой стороны, вызывает обкат без проскальзывания наружных колец 28 подшипников 27 качения подвижного солнечного колеса 23 по эталонной эпициклической гладкой поверхности зубьев 18 зубчатого венца 20 зубчатого колеса 16.
В случае выполнения на один палец 5 с цевкой больше на неподвижном солнечном колесе 4 вращение ведущего валика 11 вызывает вращение ведомого валика 22 в том же направлении с передаточным отношением, равным единице, деленной на квадрат числа зубьев 17 зубчатого колеса 15.
В случае выполнения на один палец 24 с цевкой больше на подвижном солнечном колесе 23 вращение ведущего валика 11 вызывает вращение ведомого валика 22 в противоположном направлении с передаточным отношением, равным единице, деленной на квадрат числа зубьев 18 зубчатого колеса 16 минус единица.
Возможные отклонения от номинального по осесимметричности и равномерности расположения мест закрепления пальцев 5, 24 на соответствующий солнечный колесах 4, 23, а также отклонения от параллельности осей b'-b' упомянутых пальцев 5, 24 относительно продольных осей A-A солнечных колес 4, 23 компенсируются силами сцепления, возникающими в процессе обката упомянутых поверхностей, возвращающими цевки в номинальное положение.
В связи с тем что все цевки имеют возможность упруго самоустановиться на свободном конце пальца 5, 24 относительно места его закрепления, то в процессе обката упомянутых поверхностей происходит непрерывное усреднение вышеупомянутых отклонений между всеми цевками.
Если редуктор с циклоидальным зацеплением имеет по меньшей мере на одну цевку в виде подшипника 8 качения больше на неподвижном солнечном колесе 4, и при этом зацепляющееся с подвижным солнечным колесом 23 зубчатое колесо 16 сателлита 14 имеет количество зубьев 18 зубчатого венца 20, равное количеству цевок в виде подшипников 27 качения подвижного солнечного колеса 23, то непрерывное циклоидальное зацепление происходит только в одном планетарном ряду между зубчатым колесом 15 и цевками неподвижного солнечного колеса 4, при этом передаточное отношение будет равно единице, деленной на число зубьев зубчатого колеса 15. В этом случае в другом планетарном ряду при любом угловом положении зубчатого колеса 16 относительно цевок неподвижного солнечного колеса 4 будет иметь место последовательный контакт одновременно по меньшей мере трех зубьев 18 зубчатого колеса 16 с тремя соответствующими цевками подвижного солнечного колеса 23 с заданным предварительным натягом Z=R-R'.
В связи с этим при обкате зубчатого колеса 15 по цевкам солнечного колеса 4 поворот одного зубчатого колеса 15 вместе с другим зубчатым колесом 16 в подшипниках 13 на эксцентриковой шейке 12 ведущего валика 11 передается через цевки подвижного солнечного колеса 23 на ведомый валик 22. При этом передаточное отношение вращения ведомого валика 22 к ведущему валику 11 определяется передаточным отношением в первом планетарном ряду и равно единице, деленной на число зубьев зубчатого колеса 15.
Выполнение пальцев 5, 24 в виде втулок 29, выполнение втулок 29 с шарниром 30 или с пружинной шайбой 34, а также выполнение подшипников 8, 27 качения с внутренними сферическими поверхностями 41 наружных колец, при работе редуктора усиливает компенсацию отклонений от номинального положения цевок в соответствующих солнечных колесах 4, 23.
Все вышесказанное позволяет решить задачу создания редукторов с циклоидальным зацеплением с такими профилями 17, 18 зубчатого венца 19, 20 каждого зубчатого колеса 15, 16 и таким конструктивным выполнением соответствующего солнечного колеса 4, 23, которые позволяют полностью компенсировать погрешности изготовления отдельных составных звеньев в каждом планетарном ряду. При этом учитываются фактические величины: эксцентриситета "e" между осью a-a эксцентриковой шейки 12 и продольной осью A-A ведущего валика 11, радиус r кривизны цевок и радиус R расположения цевок по окружностям неподвижного и подвижного солнечных колес 4, 23, компенсируются отклонения фактического углового расположения цевок от осесимметричности в соответствующих солнечных колесах 4, 23, а также исключаются трение скольжения, люфты и гистерезис в циклоидальном зацеплении одновременно в двух параллельных планетарных рядах при эксплуатации редуктора, тем самым обеспечивается создание коэффициента многопарности циклоидального зацепления, равного единице. Это дает возможность применять такие редукторы в приводах координатных перемещений особопрецизионных металлорежущих станков типа "обрабатывающий центр" с широкими технологическими возможностями, отвечающими перспективным требованиям.
Работоспособность предлагаемых редукторов достигнута благодаря тому, что нарезание зубчатых венцов 19, 20 на каждом зубчатом колесе 15, 16 осуществляется на зубошлифовальном станке на единой технологической базе за одну установку сателлита 14 при проведении активного контроля размера R в процессе последовательной обработки отдельно каждого зубчатого венца 19, 20. В процессе нарезания зубчатых венцов 19, 20 имитируются реальные условия эксплуатации циклоидального зацепления одновременно в двух планетарных рядах редуктора с соосным расположением обоих солнечных колес 4, 23 при непрерывном контакте с заданным предварительным натягом Z всех цевок каждого солнечного колеса 4, 23 с соответствующим зубчатым колесом 15, 16.
При этом используется известный способ обработки цилиндрических зубчатых колес, описанный в Российском патенте N 1695595, и заявке PCT/RU-94/00059 от 24.03.1994 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИПЛИКАТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2001 |
|
RU2202059C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2003 |
|
RU2273777C2 |
| МЕХАНИЗМ ПОВОРОТА | 1994 |
|
RU2083474C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ | 2002 |
|
RU2244181C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2008 |
|
RU2360160C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР | 2019 |
|
RU2714990C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2345257C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ЦЕВОЧНЫЙ РЕДУКТОР ВНЕШНЕГО ЗАЦЕПЛЕНИЯ | 2012 |
|
RU2510605C1 |
Редуктор с циклоидальным зацеплением позволяет компенсировать погрешности изготовления отдельных составных звеньев в каждом планетарном ряду. Цевки консольно закреплены на подвижном и неподвижном солнечных колесах. Два зубчатых колеса имеют эталонные зубчатые венцы, поверхность каждого из которых образована направляющей, представляющей собой замкнутую эпициклическую линию. Каждая отдельная цевка каждого солнечного колеса с заданным предварительным натягом находится в непрерывном контакте в режиме трения качения с соответствующим зубчатым колесом или каждая отдельная цевка неподвижного солнечного колеса с заданным предварительным натягом находится в непрерывном контакте в режиме трения качения с соответствующим зубчатым колесом, а каждая отдельная цевка подвижного солнечного колеса с заданным предварительным натягом находится в последовательном контакте в режиме трения качения с соответствующим зубчатым колесом. 9 з.пп. ф-лы, 10 ил.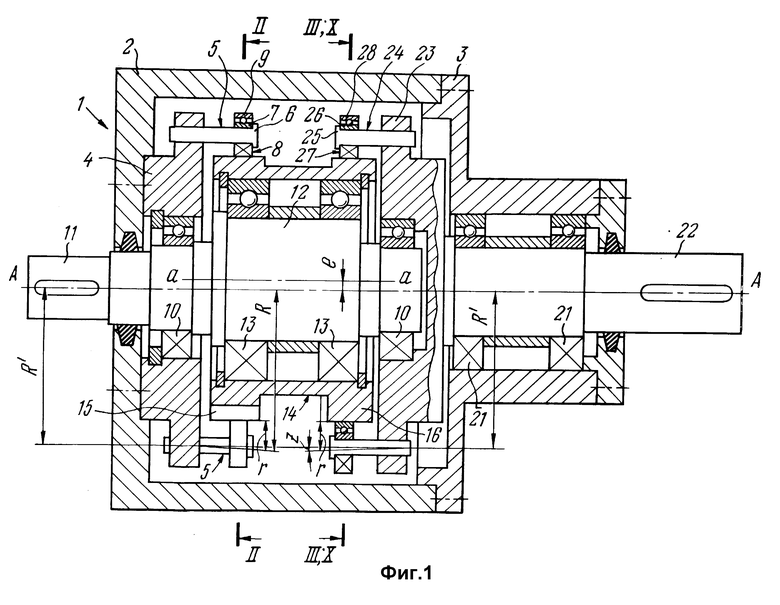
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект Института проблем надежности и долговечности машин АН БССР | |||
| - Минск: Полымя, 1988 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| EP, заявка, 0086393, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |

