Изобретение относится к прецизионному машиностроению, а более конкретно к мультипликатору с циклоидальным зацеплением.
Наиболее эффективно настоящее изобретение может быть использовано в приводах быстрого вращения в качестве особопрецизионной повышающей зубчатой передачи с высоким КПД, например в ветряных источниках питания, генераторных источниках питания.
Из известных в настоящее время конструкций мультипликаторов в наибольшей степени вышеуказанным требованиям может удовлетворять конструкция, в механической передаче которой имеет место преимущественное трение качения зубчатого зацепления. К таким видам зацепления относится циклоидальное цевочное зацепление, которое требует особо точного изготовления зубчатых колес, профиль зубчатого венца которых образует гладкую эпициклоидальную поверхность.
К недостаткам известных мультипликаторов относится их низкая эффективность и сложность изготовления отдельных его элементов, невозможность значительного увеличения скорости выходного вала по отношению к входному при обеспечении высокого значения КПД.
К наиболее близким аналогам предложенного мультипликатора относится однопланетарный редуктор (мультипликатор) с циклоидальным зацеплением, содержащий корпус, в котором неподвижно закреплено первое солнечное колесо, соосно с которым с возможностью вращения установлены ведомый валик, на эксцентриковой шейке которого с возможностью вращения размещен сателлит, и ведущий валик, при этом солнечное колесо выполнено в виде диска, на торце которого осесимметрично и равномерно расположены цевки, а сателлит выполнен в виде зубчатого колеса с эпициклоидальной формой зубьев, находящихся в циклоидальном зацеплении зубьев сателлита с цевками солнечного колеса (проспект Getriebo und Motorgetriebe CYCLO Getriebeban Lorenz Braren GmbH CYCLO, ФРГ, 1998 г.; патент RU 2123627).
Известное устройство содержит корпус, в котором неподвижно закреплено солнечное колесо, выполненное в виде диска, в котором на внутренней циклической поверхности выполнен ряд осесимметрично и равномерно расположенных пазов. В этих пазах с возможностью вращения вокруг своих продольных осей размещены ролики, выполняющие функции цевок. В указанном корпусе соосно его продольной оси симметрии установлен ведущий валик с двумя или тремя эксцентриковыми шейками. Эти шейки равномерно и осесимметрично расположены относительно продольной оси ведущего валика. Редуктор содержит сателлит, выполненный в виде двух или трех зубчатых колес с эпициклоидальной формой зубьев, размещенных с возможностью вращения на соответствующих эксцентриковых шейках ведущего валика при одновременном циклоидальном зацеплении зубьев зубчатых колес с цевками неподвижного солнечного колеса. На торцах зубчатых колес выполнены отверстия, продольные оси которых параллельны продольной оси зубчатого колеса и диаметры которых равны между собой. В корпусе редуктора соосно продольным осям ведущего валика и солнечного колеса с возможностью вращения размещен ведомый валик с жестко закрепленным на нем диском. На торцевой поверхности этого диска равномерно и осесимметрично расположены пальцы, количество которых соответствует количеству отверстий, выполненных на торцевых поверхностях зубчатых колес. Продольные оси этих пальцев параллельны продольной оси ведомого валика, а их диаметры меньше диаметров соответствующих отверстий, выполненных на торцевых поверхностях зубчатых колес, на величину двойного эксцентриситета расположения эксцентриковых шеек по отношению к продольной оси ведущего валика. Каждый палец контактирует своей наружной цилиндрической поверхностью с внутренними цилиндрическими поверхностями упомянутых отверстий двух или трех зубчатых колес при одновременном циклоидальном зацеплении всех зубчатых колес с цевками неподвижного солнечного колеса. Сочетание пальцев, расположенных на диске ведомого валика, с отверстиями, выполненными на торцевых поверхностях зубчатых колес сателлита, представляет собой механизм параллельных кривошипов, который служит для передачи крутящего момента с зубчатых колес сателлита, расположенных эксцентрично относительно продольной оси ведущего валика, на ведомый валик, расположенный концентрично относительно продольной оси ведущего валика.
К недостаткам наиболее близкого аналога относятся:
- низкое КПД передачи;
- нестабильность КПД и передаточного отношения передачи;
- повышенное трение скольжения между контактируемыми при зацеплении поверхностями;
- недостаточное повышение скорости вращения выходного вала по отношению к входному валу, затрудняющее применение в особо прецизионных повышающих зубчатых передачах.
Указанные недостатки обусловлены следующими факторами:
Наличие механизма параллельных кривошипов с дискретно-импульсным характером передачи крутящего момента от упругих пальцев диска ведущего валика мультипликатора на зубчатые колеса сателлита вызывает непостоянство передаточного отношения между ведущим и ведомым валиками мультипликатора. Этот фактор понижает КПД передачи.
Повышенные отклонения профиля каждого отдельного зуба и совокупного расположения всех зубьев зубчатых колес сателлита по отношению к единственно гладкой замкнутой эпициклической поверхности, конкретно учитывающей в каждом отдельном мультипликаторе фактические размеры диаметров цевок, их радиальное расположение в солнечном колесе относительно продольной оси, а также фактическое расстояние между осью ведомого валика мультипликатора и осью расположенной на нем эксцентриковой шейки. Этот фактор исключает возможность одновременного зацепления всех цевок солнечного колеса со всеми зубьями зубчатых колес, что приводит к периодическому прерыванию непрерывности зацепления каждой отдельной цевки с профилями зубьев зубчатых колес, а также приводит к появлению повышенного трения скольжения между контактирующими при зацеплении поверхностями. Этот фактор также понижает КПД передачи.
Наличие этих двух факторов исключает возможность использовать известную конструкцию редуктора с циклоидальным зацеплением в качестве мультипликатора из-за нестабильности КПД и передаточного отношения передачи.
Задачей настоящего изобретения является создание мультипликатора, который может быть использован в приводах быстрого вращения в качестве особопрецизионной повышающей зубчатой передачи с высоким КПД путем значительного повышения (в десять и более раз) скоростей вращения выходного вала по отношению к входному валу при КПД передачи более 90%.
Поставленная задача решена за счет того, что мультипликатор с циклоидальным зацеплением, содержащий корпус, в котором неподвижно закреплено первое солнечное колесо, соосно с которым с возможностью вращения установлен ведомый валик, на эксцентриковой шейке которого с возможностью вращения размещен сателлит, и ведущий валик, при этом солнечное колесо выполнено в виде диска, на торце которого осесимметрично и равномерно расположены цевки, а сателлит выполнен в виде зубчатого колеса с эпициклоидальной формой зубьев, находящихся в циклоидальном зацеплении зубьев сателлита с цевками солнечного колеса, отличается тем, что в корпусе соосно оси вращения ведомого валика и первого солнечного колеса, на ведущем валике неподвижно закреплено второе солнечное колесо в виде диска, на торце которого так же, как и в первом солнечном колесе, осесимметрично и равномерно на том же радиальном расстоянии от оси вращения ведущего валика расположены цевки с числом на одну меньше, чем число цевок первого солнечного колеса, при этом цевки размещены на соответствующих солнечных колесах на обращенных друг к другу торцах с возможностью упругой самоустановки и представляют собой наружные кольца подшипников качения, внутренние кольца которых жестко закреплены на свободных концах пальцев, консольно закрепленных на соответствующих торцах соответствующих солнечных колес, а зубчатое колесо сателлита выполнено в виде двух жестко связанных между собой зубчатых колес c эпициклоидальной формой зубьев и имеет число зубьев, равное количеству цевок второго солнечного колеса, а их зубчатая поверхность образована направляющей, представляющей собой замкнутую эпициклическую линию, при этом каждая цевка первого солнечного колеса с заданным предварительным натягом находится в непрерывном контакте с зубчатым колесом сателлита, а каждая цевка второго солнечного колеса с заданным предварительным натягом находится в последовательном контакте в режиме трения качения с тем же зубчатым колесом сателлита.
Создание указанной конструкции мультипликатора основана на использовании в качестве эталонных баз гладких замкнутых эпициклических поверхностей зубчатых венцов на зубчатом колесе в сочетании с указанным закреплением на соответствующих солнечных колесах цевок, выполненных в виде подшипников качения, установленных свободно с заданным предварительным натягом, которые позволяют осуществлять компенсацию влияния на кинематическую точность и, следовательно, на повышение КПД мультипликатора погрешностей изготовления его составных звеньев путем непрерывного усреднения между всеми цевками каждой отдельной погрешности.
В результате этого обеспечивается работоспособность мультипликатора с исключением интерференции при одновременном циклоидальном зацеплении даже при наличии отклонений от равномерности и осесимметричности расположения цевок в двух солнечных колесах и тем самым обеспечивается коэффициент многопарности зацепления, равный единице. Все эти конструктивные особенности позволяют исключить трение скольжения, люфты и гистерезис при работе мультипликатора.
Таким образом, решается задача создания мультипликатора с циклоидальным зацеплением с таким профилем зубчатого венца зубчатого колеса и таким конструктивным выполнением соответствующего солнечного колеса, которое позволяет полностью компенсировать погрешности изготовления отдельных составных звеньев зубчатой передачи, учитывают фактические величины: эксцентриситета "е" между осью эксцентриковой шейки и продольной осью ведомого валика, радиуса кривизны цевок и радиуса расположения цевок по окружности неподвижного и подвижного солнечных колес, компенсирует отклонения фактического углового расположения цевок от осесимметричности в соответствующих солнечных колесах, а также исключает трение скольжения, люфты и гистерезис в зубчатой передаче и тем самым обеспечивает создание коэффициента многопарности циклоидального зацепления, равного единице. Это дает возможность применять такие мультипликаторы в приводах быстрого вращения в качестве особопрецизионной зубчатой передачи с высоким КПД.
Для лучшего понимания изобретения ниже приведены конкретные примеры его выполнения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 схематично изображает мультипликатор согласно изобретению, вид сбоку в разрезе;
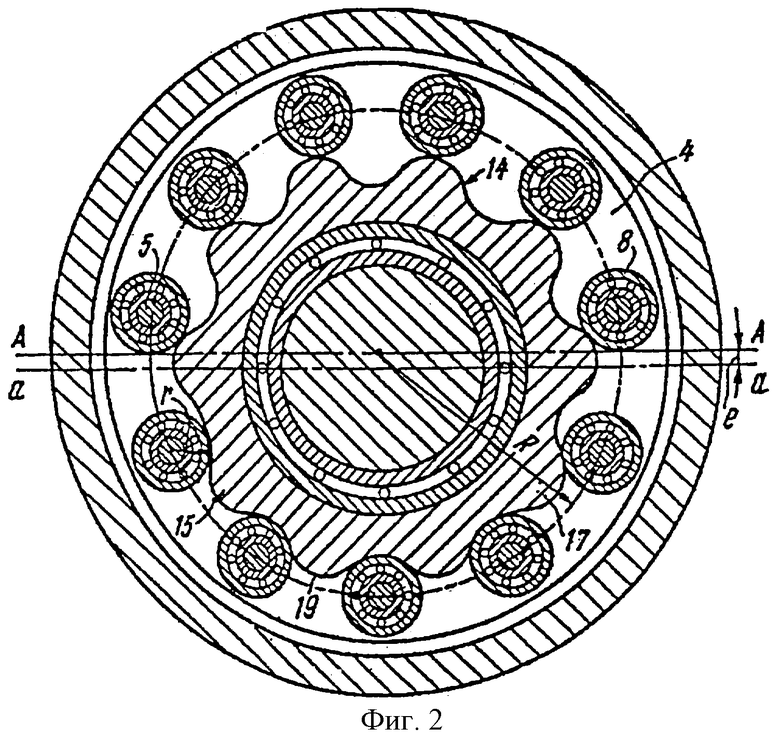
фиг.2 - сечение II-II на фиг.1;
фиг.3 - сечение III-III на фиг.1;
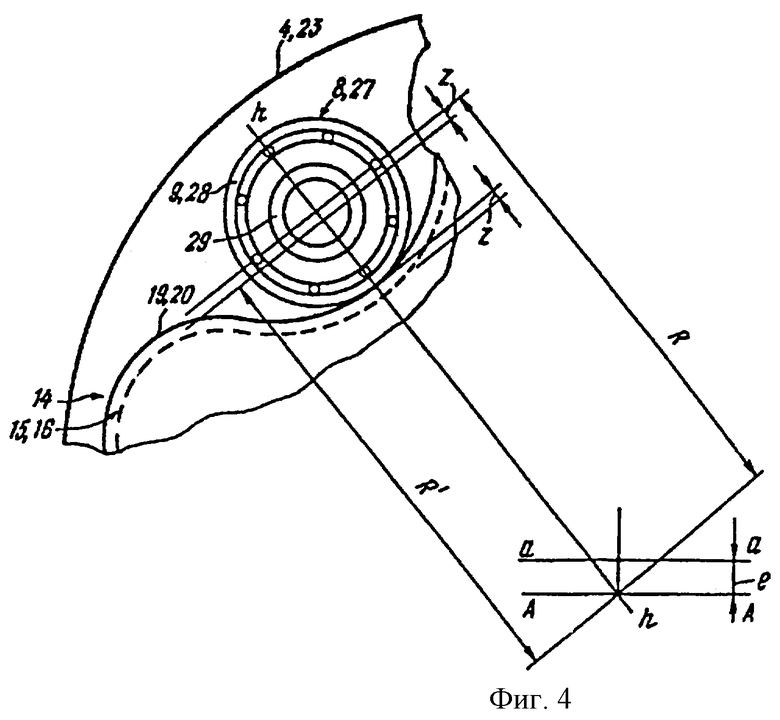
фиг.4 - цевка в контакте с зубчатым колесом согласно изобретению;
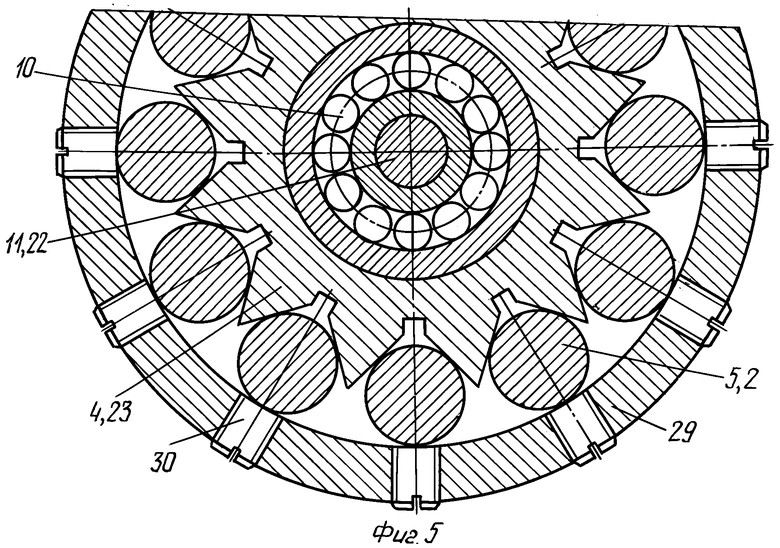
фиг.5 - солнечное колесо в виде делительного диска в контакте с пальцами согласно изобретению.
Мультипликатор с циклоидальным зацеплением, выполненный согласно изобретению, содержит корпус 1 (фиг.1), состоящий из двух жестко соединенных частей 2, 3, в котором неподвижно закреплено первое солнечное колесо 4. Колесо 4 установлено в первой части 2 корпуса. На этом солнечном колесе 4 консольно жестко осесимметрично и равномерно на радиусе R параллельно между собой и продольной оси А-А этого солнечного колеса 4 закреплены пальцы 5. На свободных концах 6 пальцев 5 неподвижно закреплены внутренние кольца 7 подшипников 8 качения, наружные кольца 9 которых выполняют функции цевок, имеющих радиус наружной поверхности, равный r. В этой же части 2 корпуса 1, опираясь на два подшипника 10, соосно продольной оси А-А неподвижного первого солнечного колеса 4, установлен ведомый валик 11 с эксцентриковой шейкой 12, продольная ось а-а которой расположена относительно продольной оси А-А, соответствующей оси, вращения ведомого валика 11, с эксцентриситетом "е". На эксцентриковой шейке 12 на двух подшипниках 13 установлено зубчатое колесо сателлита 14, выполненное в виде двух жестко связанных между собой зубчатых колес 15 и 16 с эпициклоидальными профилями зубьев 17 и зубьев 18 на зубчатых венцах 19 и 20 (фиг.2, 3) каждого соответствующего зубчатого колеса 15 и 16.
Поверхность зубчатого венца 19 и 20 (фиг.3) каждого зубчатого колеса 15 и 16 (фиг.2, 3) образована направляющей, представляющей собой замкнутую эпициклическую линию, то есть эти поверхности представляют собой гладкие замкнутые эпициклические поверхности, которые являются эталонными базами в циклоидальном зацеплении.
Выполнение каждой указанной эталонной базовой гладкой замкнутой эпициклической поверхности зубчатого венца 19, 20 на каждом зубчатом колесе 15, 16 возможно путем использования способа обработки цилиндрических зубчатых колес, который обеспечивает выполнение каждого зубчатого колеса путем непрерывной по мере удаления припуска имитации заданных условий эксплуатации циклоидной передачи в каждом планетарном ряду, а также путем непрерывного контроля радиальных размерных параметров профиля обрабатываемой зубчатой поверхности каждого зубчатого колеса при его изготовлении с получением профиля с точными заданными размерами, учитывающими фактическую величину эксцентриситета между осью эксцентриковой шейки и осью вращения ведомого валика, величину радиуса кривизны цилиндрических поверхностей цевок, величину радиального расположения цевок по окружности соответствующего солнечного колеса, а также заданную величину предварительного натяга между контактирующими при зацеплении поверхностями.
Во второй части 3 (фиг.1) корпуса 1, опираясь на два подшипника 21 соосно оси А-А вращения ведомого валика 11, установлен ведущий валик 22. На ведущем валике 22 неподвижно закреплено второе солнечное колесо 23 в виде диска, установленное соосно продольной оси А-А первого солнечного колеса 4, оси А-А вращения ведомого валика 11 и оси вращения А-А ведущего валика 22. На втором солнечном колесе 23 консольно жестко осесимметрично и равномерно на радиусе R, равном радиусу R первого солнечного колеса 4, параллельно между собой и продольной оси А-А этого солнечного колеса 23 закреплены пальцы 24. На свободных концах 25 пальцев 24 неподвижно закреплены внутренние кольца 26 подшипников 27 качения, наружные кольца 28 которых выполняют функции цевок второго солнечного колеса 23, имеющих радиус наружной поверхности, равный r и равный радиусу r наружной поверхности цевок первого солнечного колеса 4. Каждое зубчатое колесо имеет число зубьев, равное количеству цевок второго солнечного колеса, а их зубчатая поверхность образована направляющей, представляющей собой замкнутую эпициклическую линию, при этом каждая цевка первого солнечного колеса с заданным предварительным натягом находится в непрерывном контакте в режиме трения качения с зубчатым колесом сателлита, а каждая цевка второго солнечного колеса с заданным предварительным натягом находится в последовательном контакте в режиме трения качения с тем же зубчатым колесом сателлита.
Число цевок второго солнечного колеса на одну меньше, чем число цевок первого солнечного колеса, при этом цевки размещены на соответствующих солнечных колесах на обращенных друг к другу торцах с возможностно упругой самоустановки.
В мультипликаторе с циклоидальным зацеплением с двумя параллельными планетарными рядами пальцы первого и второго солнечных колес 4, 23 можно выполнить в виде втулок 29. Причем радиус R/ места закрепления каждой отдельной втулки 29 на торцевых поверхностях дисков соответствующих солнечных колес 4, 23 всегда меньше номинального значения радиуса R расположения соответствующих цевок (наружных колец 9, 28 подшипников 8, 27) на величину предварительного натяга Z (фиг.4) в направлении по нормали n-n между контактирующими при циклоидальном зацеплении эталонными поверхностями зубчатых венцов 19, 20 зубчатых колес 15, 16 сателлита 14 с наружными поверхностями наружных колец 8, 23 подшипников 8, 27 качения (цевок). Предварительный натяг Z определяется расстоянием между эталонными поверхностями зубчатых венцов 19, 20 зубчатых колес 15, 16 сателлита 14 и мнимыми эквидистантными эталонными поверхностями, с которыми контактировали бы наружные поверхности наружных колец 9, 28 подшипников 8, 27 качении при условии, если величина R/ равнялась бы величине R.
Возможно выполнить на один палец 5 (фиг.2) с подшипником 8 качения больше на неподвижном солнечном колесе 4. При этом зацепляющееся с подвижным солнечным колесом 23 (фиг.3) зубчатое колесо 16 сателлита 14 должно иметь количество зубьев 18 зубчатого венца 20, равное количеству пальцев 24 с подшипниками 27 качения подвижного солнечного колеса 23.
В данном случае каждая отдельная цевка неподвижного солнечного колеса 4 с заданным предварительным натягом находится в непрерывном контакте в режиме трения качения с соответствующим зубчатым колесом 15, а каждая отдельная цевка подвижного солнечного колеса 23 с заданным предварительным натягом находится в последовательном контакте в режиме трения качения с соответствующим зубчатым колесом 16, поверхность зубчатого венца 17, 18 каждого из которых образована направляющей, представляющей собой замкнутую эпициклическую линию.
В мультипликаторе с циклоидальным зацеплением с двумя параллельными планетарными рядами первое и второе солнечное колеса 4, 23 можно выполнить в виде делительных дисков с числом пазов каждого, равным числу цевок, а пальцы 5, 24 соответственно закреплены в пазах делительных дисков. При этом пальцы 5, 24 прижимаются к соответствующим пазам указанных делительных дисков 4, 23 внутренними поверхностями кольцевых втулок 29 и фиксируются в осевом направлении винтами 30.
Предлагаемый мультипликатор с циклоидальным зацеплением работает следующим образом.
Вращение от вала приводного двигателя (на чертежах на показанного) передается ведущему валику 22 и, соответственно, второму подвижному солнечному колесу 23 с пальцами 24 и далее подшипникам 27 качения с наружными кольцами 28, выполняющими функции цевок. В связи с тем, что количество цевок солнечного колеса 23 равно количеству зубьев 18 зубчатого колеса 16 и при этом замкнутый эпициклоидальный профиль зубчатого венца 20 этого зубчатого колеса 16 занимает эксцентричное положение по отношению к оси расположения цевок в солнечном колесе 23, определяемое величиной эксцентриситета "е" расположения эксцентриковой шейки 12 ведомого валика 11, то дальнейшая передача крутящего момента от приводного двигателя через наружные кольца 28 по меньшей мере трех подшипников 27 качения (фиг.3) солнечного колеса 23, находящихся в последовательном контакте по меньшей мере с тремя зубьями 18 зубчатого колеса 16, осуществляется на зубчатое колесо 16. Поворачиваясь под действием внешнего крутящего момента на подшипниках 13 эксцентриковой шейки 12 выходного валика, 11 зубчатое колесо 16 своим замкнутым эпициклоидальным профилем совершает обкат относительно наружных колец 9 подшипников 8 качения, (то есть цевок) неподвижного солнечного колеса 4. При этом зубчатое колесо 16 совершает планетарное плоскопараллельное движение. В результате такого движения зубчатого колеса 16 эксцентриковая шейка 12 ведомого валика 11 вместе с подшипниками 13 будет совершать круговые движения на подшипниках 10 относительно корпуса 1. При этом за один оборот ведущего валика 22 под действием внешнего крутящего момента приводной двигатель вызывает увеличение количества оборотов ведомого валика 11 в число раз, соответствующего количеству цевок подвижного солнечного колеса.
В связи с тем, что радиус R/ места закрепления каждого пальца 5 неподвижного солнечного колеса 4 и каждого пальца 24 подвижного солнечного колеса 23 меньше номинального значения R, определяющего эталонные профили гладких замкнутых эпициклоидальных поверхностей зубьев 17, 18 зубчатых венцов 19, 20 зубчатых колес 15, 16, то еще до начала плоскопараллельного движения сателлита 14 по круговой траектории все цевки (в виде наружных колец 9 подшипников 8 качения) неподвижного солнечного колеса 4 будут с заданным предварительным натягом Z= R-R/ контактировать с зубчатым венцом 19 соответствующего зубчатого колеса 15, а все цевки (в виде наружных колец 28 подшипников 27 качения) подвижного солнечного колеса 28 будут с таким же предварительным натягом Z= R-R/ последовательно контактировать с зубчатым венцов 20 соответствующего зубчатого колеса 16. Причем действие предварительного натяга Z в обоих случаях направлено в сторону центра соответствующих солнечных колес 4, 23.
Наличие постоянного предварительного натяга Z одновременно всех цевок солнечного колеса 4 с зубчатыми венцами 19 зубчатого колеса 15, а также возможность самоустановки цевок за счет свободной изгибной жесткости свободных концов 6, 25 пальцев 5, 24 относительно мест их закрепления на торцевых поверхностях дисков солнечных колес 4, 23 позволяют при плоскопараллельном перемещении сателлита 14 по круговой траектории относительно центра, совпадающего с осью симметрии наружных колец 9 подшипников 8 качения неподвижного солнечного колеса 4, обкатывать зубья 17 зубчатого колеса 15 по наружным кольцам 9 подшипников 8 качения солнечного колеса 4.
Это происходит в связи с возможностью обката без проскальзывания наружной поверхности центроиды эталонной эпициклической гладкой замкнутой поверхности, зубьев 17 зубчатого венца 19, диаметр которой (центроиды) определяется произведением двойного эксцентриситета "е" на число зубьев 17 зубчатого колеса 15, по внутренней поверхности неподвижной центроиды, диаметр которой определяется произведением двойного эксцентриситета "е" на число цевок неподвижного солнечного колеса 4. Обкат указанной наружной поверхности центроиды по указанной внутренней поверхности центроиды вызывает вращение зубчатого колеса 15 на подшипниках 13 в сторону, противоположную направлению вращения ведомого валика 11, с передаточным отношением, равным единице, деленной на число зубьев зубчатого колеса 15.
Возможные отклонения от номинального по осесимметричности и равномерности расположения мест закрепления пальцев 5, 24 на соответствующих солнечных колесах 4, 23, а также отклонения от параллельности осей b'-b' упомянутых пальцев 5, 24 относительно продольных осей А-А солнечных колес 4, 23 компенсируются силами сцепления, возникающими в процессе обката упомянутых поверхностей, возвращающими цевки в номинальное положение.
В связи с тем, что все цевки имеют возможность упруго самоустановиться на свободном конце пальца 5, 24 относительно места его закрепления, то в процессе обката упомянутых поверхностей происходит непрерывное усреднение вышеупомянутых отклонений между всеми цевками.
В связи с тем, что мультипликатор с циклоидальным зацеплением имеет по меньшей мере на одну цевку в виде подшипника 8 качения больше на неподвижном солнечном колесе 4, и при этом зацепляющееся с подвижным солнечным колесом 23 зубчатое колесо 16 сателлита 14 имеет количество зубьев 18 зубчатого венца 20, равное количеству цевок в виде подшипников 27 качения подвижного солнечного колеса 23, то непрерывное циклоидальное зацепление происходит только в одном планетарном ряду между зубчатым колесом 15 и цевками неподвижного солнечного колеса 4, при этом передаточное отношение будет равно единице, деленной на число зубьев зубчатого колеса 15. В этом случае в другом планетарном ряду при любом угловом положении зубчатого колеса 16 относительно цевок неподвижного солнечного колеса 4 будет иметь место последовательный контакт одновременно по меньшей мере трех зубьев 18 зубчатого колеса 16 с тремя соответствующими цевками подвижного солнечного колеса 23 с заданным предварительным натягом Z=R-R/.
В связи с этим при обкате зубчатого колеса 15 по цевкам солнечного колеса 4 поворот одного зубчатого колеса 15 вместе с другим зубчатым колесом 16 в подшипниках 13 на эксцентриковой шейке 12 ведомого валика 11 передается через цевки подвижного солнечного колеса 23 от ведущего валика 22. При этом передаточное отношение от вращения ведущего валика 22 к ведомому валику 11 определяется передаточным отношением в первом планетарном ряду и равно числу зубьев зубчатого колеса 15.
В связи с тем, что мультипликатор с циклоидальным зацеплением с двумя планетарными рядами может иметь солнечные колеса 4, 23, выполненные в виде делительных дисков с числом пазов каждого, равным числу цевок 5, 24 соответствующего планетарного ряда, то такое конструктивное решение позволяет уменьшить диаметральные размеры пальцев 5, 24, тем самым уменьшить диаметральные размеры подшипников 8, 27, а это в свою очередь позволяет существенно повысить технические параметры мультипликатора за счет повышения быстроходности вращения и передаваемого крутящего момента ведомому валику 11 при снижении диаметральных размеров корпуса 1 мультипликатора.
Все вышесказанное позволяет решить задачу создания мультипликатора с циклоидальным зацеплением с такими профилями 17, 18 зубчатого венца 19, 20 каждого зубчатого колеса 15, 16 и таким конструктивным выполнением соответствующего солнечного колеса 4, 23, которые позволяют полностью компенсировать погрешности изготовления отдельных составных звеньев в каждом планетарном ряду. При этом учитываются фактические величины: эксцентриситета "е" между осью а-а эксцентриковой шейки 12 и продольной ось А-А ведомого валика 11, радиус r кривизны цевок и радиус R расположения цевок по окружностям неподвижного и подвижного солнечных колес 4, 23, компенсируются отклонения фактического углового расположения цевок от осесимметричности в соответствующих солнечных колесах 4, 23, а также исключаются трение скольжения, люфты и гистерезис в циклоидальном зацеплении одновременно в двух параллельных планетарных рядах при эксплуатации мультипликатора, тем самым обеспечивается создание коэффициента многопарности циклоидального зацепления, равного единице. Это дает возможность применять такие мультипликаторы в приводах быстрого вращения.
Работоспособность предлагаемых мультипликаторов достигнута благодаря тому, что нарезание зубчатых венцов 19, 20 на каждом зубчатом колесе 15, 16 осуществляется на зубошлифовальном станке на единой технологической базе за одну установку сателлита 14 при проведении активного контроля размера R в процессе последовательной обработки отдельно каждого зубчатого венца 19, 20. В процессе нарезания зубчатых венцов 19, 20 имитируются реальные условие эксплуатации циклоидального зацепления одновременно в двух планетарных рядах мультипликатора с соосным расположением обоих солнечных колес 4, 23 при непрерывном контакте с заданным предварительным натягом Z всех цевок каждого солнечного колеса 4, 23 с соответствующим зубчатым колесом 15, 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2003 |
|
RU2273777C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2345257C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ ЭЛЕКТРОПРИВОД | 2019 |
|
RU2714568C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ | 2002 |
|
RU2244181C2 |
| РЕДУКТОР С ПРОМЕЖУТОЧНЫМИ ТЕЛАМИ В ЗАЦЕПЛЕНИИ | 2005 |
|
RU2292501C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2008 |
|
RU2360160C1 |

Изобретение относится к прецизионному машиностроению, а именно к мультиплекаторам с циклоидальным зацеплением. Мультипликатор содержит корпус, в котором неподвижно закреплено первое солнечное колесо, соосно с которым с возможностью вращения установлены ведомый валик, на эксцентриковой шейке которого с возможностью вращения размещен сателлит, ведущий валик и второе солнечное колесо. Первое солнечное колесо выполнено в виде диска, на торце которого осесимметрично и равномерно расположены цевки. Сателлит выполнен в виде зубчатого колеса с эпициклоидальной формой зубьев, находящихся в циклоидальном зацеплении с цевками солнечного колеса. Второе солнечное колесо выполнено в виде диска, на торце которого так же, как и в первом солнечном колесе, осесимметрично и равномерно на том же радиальном расстоянии от оси вращения ведущего валика расположены цевки с числом на одну меньше, чем число цевок первого солнечного колеса. Цевки размещены на соответствующих солнечных колесах на обращенных друг к другу торцах с возможностью упругой самоустановки и представляют собой наружные кольца подшипников качения, внутренние кольца которых жестко закреплены на свободных концах пальцев. Зубчатое колесо сателлита выполнено в виде двух жестко связанных между собой зубчатых колес с эпициклоидальной формой зубьев и имеет число зубьев, равное количеству цевок второго солнечного колеса. Технический результат заключается в повышении КПД. 5 ил.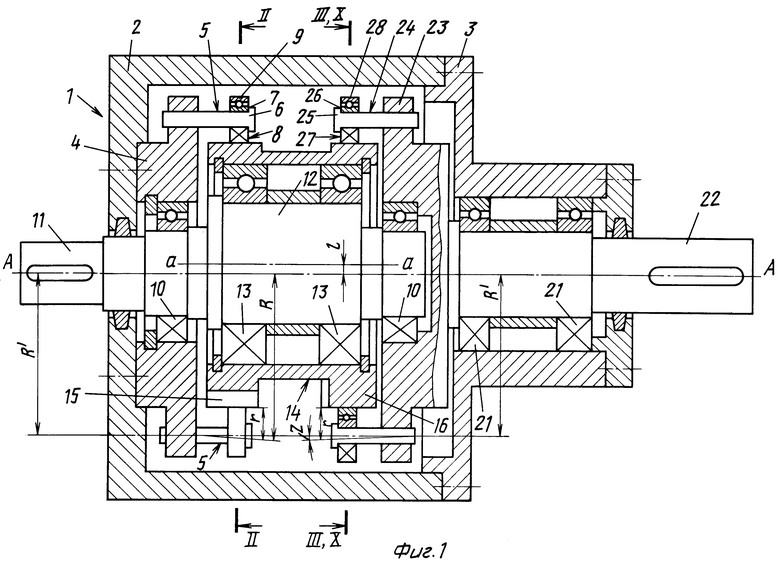
Мультипликатор с циклоидальным зацеплением, содержащий корпус, в котором неподвижно закреплено первое солнечное колесо, соосно с которым с возможностью вращения установлены ведомый валик, на эксцентриковой шейке которого с возможностью вращения размещен сателлит, и ведущий валик, при этом солнечное колесо выполнено в виде диска, на торце которого осесимметрично и равномерно расположены цевки, а сателлит выполнен в виде зубчатого колеса с эпициклоидальной формой зубьев, находящихся в циклоидальном зацеплении зубьев сателлита с цевками солнечного колеса, отличающийся тем, что в корпусе соосно оси вращения ведомого валика и первого солнечного колеса, на ведущем валике неподвижно закреплено второе солнечное колесо в виде диска, на торце которого так же, как и в первом солнечном колесе, осесимметрично и равномерно на том же радиальном расстоянии от оси вращения ведущего валика расположены цевки с числом на одну меньше, чем число цевок первого солнечного колеса, при этом цевки размещены на соответствующих солнечных колесах на обращенных друг к другу торцах с возможностью упругой самоустановки и представляют собой наружные кольца подшипников качения, внутренние кольца которых жестко закреплены на свободных концах пальцев, консольно закрепленных на соответствующих торцах соответствующих солнечных колес, а зубчатое колесо сателлита выполнено в виде двух жестко связанных между собой зубчатых колес с эпициклоидальной формой зубьев и имеет число зубьев, равное количеству цевок второго солнечного колеса, а зубчатая поверхность образована направляющей, представляющей собой замкнутую эпициклическую линию, при этом каждая цевка первого солнечного колеса с заданным предварительным натягом находится в непрерывном контакте в режиме трения качения с зубчатым колесом сателлита, а каждая цевка второго солнечного колеса с заданным предварительным натягом находится в последовательном контакте в режиме трения качения с тем же зубчатым колесом сателлита.
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| СПОСОБ ИЗГОТОВЛЕПИЯ ОДНОСЛОЙНЫХ КЕРАМИЧЕСКИХФОРМ | 0 |
|
SU349467A1 |
