Изобретение относится к машиностроению, преимущественно к космической технике. Изобретение может применяться в составе тросового устройства стягивания в стыковочном механизме космического аппарата.
Известен планетарный циклоидальный редуктор с предварительной ступенью (аналог), представленный в патенте РФ №2506477, содержащий быстроходный вал, колесо внутреннего зацепления, венец которого образован роликами, циклоидальную ступень с циклоидальным диском, имеющим на внешней поверхности циклоидальные зубья для зацепления с роликами. Вращение диска вокруг собственной оси передается к быстроходному валу редуктора с помощью пальцев с роликами, обкатывающими отверстия в циклоидальном диске. На внутренней поверхности циклоидального диска выполнено колесо внутреннего зацепления. Предварительная планетарная ступень расположена в плоскости циклоидального диска и внутри него. Предварительная ступень содержит входную шестерню, связанную с быстроходным валом, и посаженные на свободное водило три сателлита. Один сателлит находится в одновременном зацеплении с входной шестерней и колесом внутреннего зацепления и выполнен размером, обеспечивающим эксцентричную посадку этого диска относительно оси редуктора. Другие сателлиты имеют меньшие размеры и находятся в зацеплении только с колесом внутреннего зацепления.
Недостатком конструкции является наличие пальцев с роликами, которые имеют малую нагрузочную способность из-за консольного их закрепления. Кроме того, наличие предварительной планетарной ступени, имеющей диаметр, ограниченный технологическими возможностями, а также требованиям к нагружению эвольвентных зубов, при помощи которых она взаимодействует с циклоидальным диском, увеличивает внешний диаметр циклоидального диска, избыточно повышая запас прочности цевочного зацепления.
Известен планетарный редуктор завода Пекрун (прототип), представленный в книге Руденко Н.Ф. Планетарные передачи. Теория, применение, расчет, проектирование - М: Государственное научно-техническое издательство Машиностроительной литературы - 1947 г, в котором на входном валу, опирающемся на два подшипника, размещено водило, на котором расположен сателлит с двумя неподвижными относительно друг друга шестернями с разным числом зубьев, имеющих возможность вращения относительно водила, причем первая шестерня находится в эвольвентном зацеплении с первым неподвижным корпусом, а вторая входит во внутреннее эвольвентное зацепление с зубьями, размещенными на выходном валу, размещенном на двух подшипниках.
Недостатком конструкции является низкая нагрузочная способность ввиду того, что входной и выходной валы редуктора размещены на подшипниках консольно, а также ввиду того, что каждый сателлит находится в эвольвентном зацеплении, нагрузка передается через число зубьев от одного до трех для каждой шестерни в зацеплении, что не является рациональным и требует увеличения габарита корпуса и выходного вала.
Техническим результатом изобретения является увеличение нагрузочной способности редуктора.
Технический результат достигается тем, что в планетарном редукторе, содержащем входной вал, размещенный на подшипниках, первый сателлит, в котором имеются первая и вторая шестерни, неподвижные относительно друг друга и имеющие разное число зубьев, первый неподвижный корпус, выходной вал, размещенный на подшипниках в отличие от известного, введен второй неподвижный корпус, цевки, размещенные в неподвижных корпусах и выходном валу, также введен второй сателлит с первой и второй шестернями, неподвижными относительно друг друга, на входном валу размещены два эксцентрика, причем один из них развернут относительно другого на половину оборота относительно оси вращения входного вала, второй неподвижный корпус и второй сателлит размещены центрально симметрично, соответственно, первому неподвижному корпусу и первому сателлиту относительно точки, расположенной между двумя эксцентриками и на оси вращения входного вала, на боковой поверхности каждого эксцентрика расположена опора, с которой взаимодействует один из сателлитов, зубья шестерен сателлитов выполнены в виде циклоид, первая шестерня первого сателлита входит в зацепление с цевками в первом неподвижном корпусе, первая шестерня второго сателлита входит в зацепление с цевками во втором неподвижном корпусе, вторая шестерня каждого сателлита входит в зацепление с цевками в выходном валу, первые шестерни каждого сателлита выполнены с равным число зубьев, вторые шестерни каждого сателлита выполнены с равным числом зубьев, неподвижные корпуса имеют одинаковое число цевок, два подшипника входного вала и два подшипника выходного вала размещены по обе стороны плоскости, перпендикулярной оси вращения входного вала и лежащей между эксцентриками.
Технический результат также достигается тем, что в планетарном редукторе опора может быть выполнена в виде подшипника скольжения.
Технический результат также достигается тем, что в планетарном редукторе опора может быть выполнена в виде подшипника качения.
Заявляемое техническое решение поясняется изображениями:
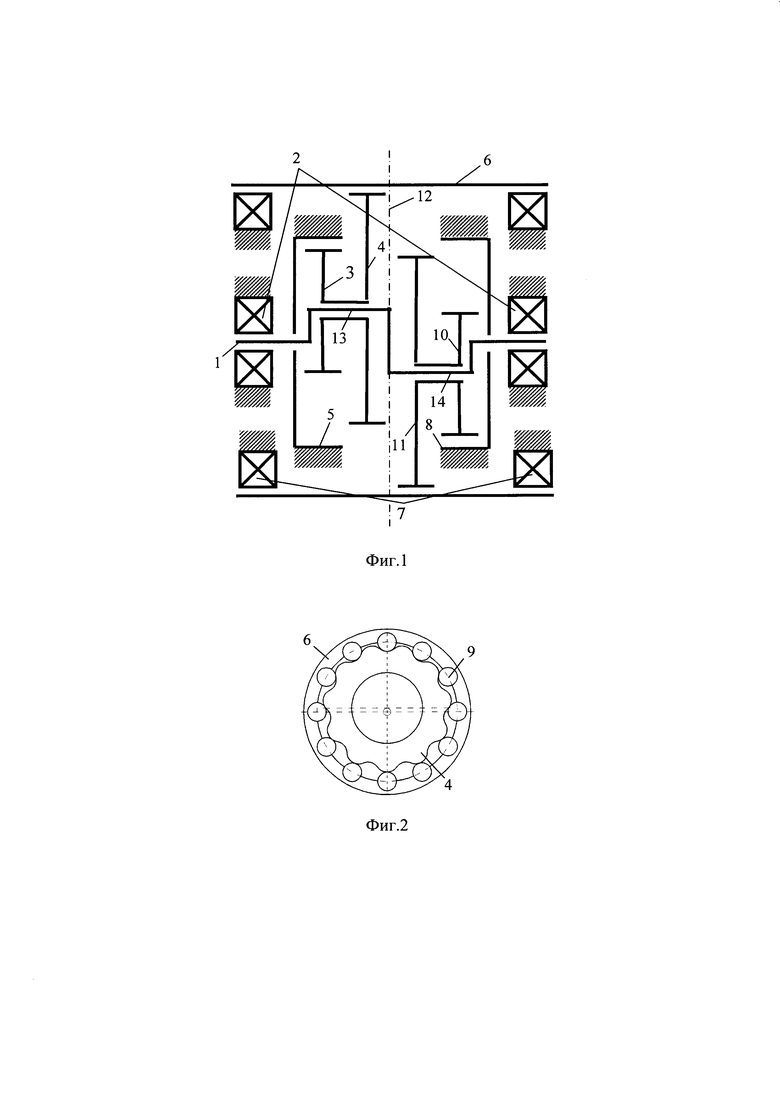
фиг. 1 - кинематическая схема планетарного редуктора;
фиг. 2 - вид циклоидного цевочного зацепления на примере второй шестерни первого сателлита и выходного вала.
Планетарный редуктор содержит входной вал 1, размещенный на подшипниках 2, первый сателлит, в котором имеются первая и вторая шестерни 3 и 4, первый неподвижный корпус 5, выходной вал 6, размещенный на подшипниках 7, второй неподвижный корпус 8. В неподвижных корпусах 5 и 8 и в выходном валу 6 размещены цевки 9. Цевки во втором неподвижном корпусе 8 повернуты относительно цевок в первом неподвижном корпусе на половину оборота вокруг оси вращения входного вала 1. Планетарный редуктор также содержит второй сателлит с первой и второй шестернями, соответственно 10 и 11, неподвижными относительно друг друга. На входном валу размещены два эксцентрика 13 и 14. Второй неподвижный корпус 8 и второй сателлит размещены центрально симметрично, соответственно, первому неподвижному корпусу 5 и первому сателлиту относительно точки, расположенной посередине между двумя эксцентриками 13 и 14 и на оси вращения входного вала 1 и перпендикулярной ей. Эксцентрик 14 развернут относительно эксцентрика 13 на половину оборота вокруг оси вращения входного вала 1. На боковой поверхности каждого эксцентрика расположена опора, с которой взаимодействует один из сателлитов. Опора может быть выполнена в виде подшипника скольжения или качения. Зубья всех шестерен сателлитов выполнены в виде циклоид (см. рис. 2), первая шестерня 3 первого сателлита входит в зацепление с цевками первого неподвижного корпуса 5, первая шестерня 10 второго сателлита входит в зацепление с цевками второго неподвижного корпуса 8. вторые шестерни сателлитов 4 и 11 входят в зацепление с цевками выходного вала 6. Первые шестерни 3 и 10 сателлитов имеют одинаковое число зубьев, вторые шестерни 4 и 11 сателлитов имеют одинаковое число зубьев. Неподвижные корпуса 5 и 8 имеют одинаковое число цевок. Два подшипника входного вала 2 и два подшипника выходного вала 7 размещены по обе стороны плоскости 12, расположенной посередине между эксцентриками и перпендикулярной оси вращения входного вала 1. Это позволяет исключить консольное расположение элементов редуктора.
Планетарный редуктор работает следующим образом.
Входной вал 1 с эксцентриками 13 и 14 приводом вращается вокруг своей оси. Сателлиты приходят в движение из-за того, что выступами циклоид шестерен 3 и 10 взаимодействуют с неподвижными цевками корпусов 4 и 9.
Движение сателлитов имеет следующий характер:
их центр движется по окружности, радиус которой равен эксцентриситету входного вала 1;
относительно своего центра он имеет угловое вращение - на один оборот входного вала 1 он поворачивается на 1/n оборотов, где n - число цевок неподвижного корпуса.
Движение сателлита приводит к взаимодействию выполненных на шестернях 4 и 11 циклоид с цевками выходного вала 6, размещенного на подшипниках 7. Характер движения сателлита и его взаимодействия с цевками выходного вала 6 приводит к тому, что оно, имеющее возможность только осевого вращения, начинает вращаться. Передаточное отношение при этом определяется по формуле:
где zК - число цевок неподвижного корпусов 5 и 8,  - число цевок выходного вала 6. Положительное значение передаточного отношения i означает, что выходной вал 6 будет вращаться сонаправлено направлению вращения входного вала 1. Отрицательное значение передаточного отношения i означает, что выходной вал 6 будет вращаться в противоположном вращению входного вала 1 направлении.
- число цевок выходного вала 6. Положительное значение передаточного отношения i означает, что выходной вал 6 будет вращаться сонаправлено направлению вращения входного вала 1. Отрицательное значение передаточного отношения i означает, что выходной вал 6 будет вращаться в противоположном вращению входного вала 1 направлении.
Форма циклоиды каждой из шестерен определяется следующим образом: вычисляется предварительная форма циклоиды - эпитрохоида:

где R- радиус окружности, на которой размещаются центры цевок, входящие в зацепление с шестерней, для которой производится расчет формы, zi - число цевок,  - эксцентриситет вала 1, параметр t=0…360° переменная;
- эксцентриситет вала 1, параметр t=0…360° переменная;
затем выполняется построение эквидистанты (отступ по нормали к траектории) в направлении оси шестерни на расстояние Rц - радиус цевок.
Актуальность создания изобретения обуславливается возможностью его использования в составе периферийного стыковочного механизма космического аппарата. Стыковочный механизм состоит из стыковочного кольца, защелок, шести устройств поглощения энергии (штанг стыковочного механизма) и тросового устройства стягивания.
Тросовое устройство стягивания используется после образования первичной механической связи между двумя космическими аппаратами. С его помощью выполняется совмещение стыковочных плоскостей до обеспечения возможности закрытия стыка с помощью крюков механизма герметизации. При этом необходимо обжать множество элементов стыка: электроразъемы, гидроразъемы, резиновые уплотнения, толкатели.
Ввиду жестких требований к массе, в приводе тросового устройства стягивания используются маломощные высокооборотистые двигатели, которые должны создавать значительную силу, преодолевающую сопротивление элементов стыка, поэтому особо важным является использование малогабаритных и высоконагруженных редукторов, например планетарного редуктора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНЕТАРНЫЙ РЕДУКТОР | 2018 |
|
RU2694003C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР | 2018 |
|
RU2693752C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| МУЛЬТИПЛИКАТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 2001 |
|
RU2202059C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР ПОВЫШЕННОЙ МОЩНОСТИ ПЦР ПМ | 2003 |
|
RU2251038C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА - ПЭ ПЦР | 2011 |
|
RU2506685C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2007 |
|
RU2345257C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ ЭЛЕКТРОПРИВОД | 2019 |
|
RU2714568C1 |
Изобретение относится к машиностроению. Планетарный редуктор содержит входной вал, первый сателлит с первой и второй шестернями, первый неподвижный корпус, выходной вал, второй неподвижный корпус, цевки, размещенные в корпусах и выходном валу, второй сателлит с первой и второй шестернями, на входном валу размещены два эксцентрика, причем один из них развернут относительно другого на половину оборота. Второй корпус и второй сателлит размещены центрально симметрично, соответственно, первому корпусу и первому сателлиту относительно точки, расположенной между двумя эксцентриками и на оси вращения входного вала, на боковой поверхности каждого эксцентрика расположена опора, с которой взаимодействует один из сателлитов, зубья шестерен сателлитов выполнены в виде циклоид, первая шестерня первого сателлита входит в зацепление с цевками в первом неподвижном корпусе, первая шестерня второго сателлита входит в зацепление с цевками во втором корпусе, вторая шестерня каждого сателлита входит в зацепление с цевками в выходном валу, первые шестерни каждого сателлита выполнены с равным число зубьев, вторые шестерни каждого сателлита выполнены с равным числом зубьев, корпуса имеют одинаковое число цевок, два подшипника входного вала и два подшипника выходного вала размещены по обе стороны плоскости, перпендикулярной оси вращения входного вала и лежащей между эксцентриками. Обеспечивается увеличение нагрузочной способности редуктора. 2 з.п. ф-лы, 2 ил.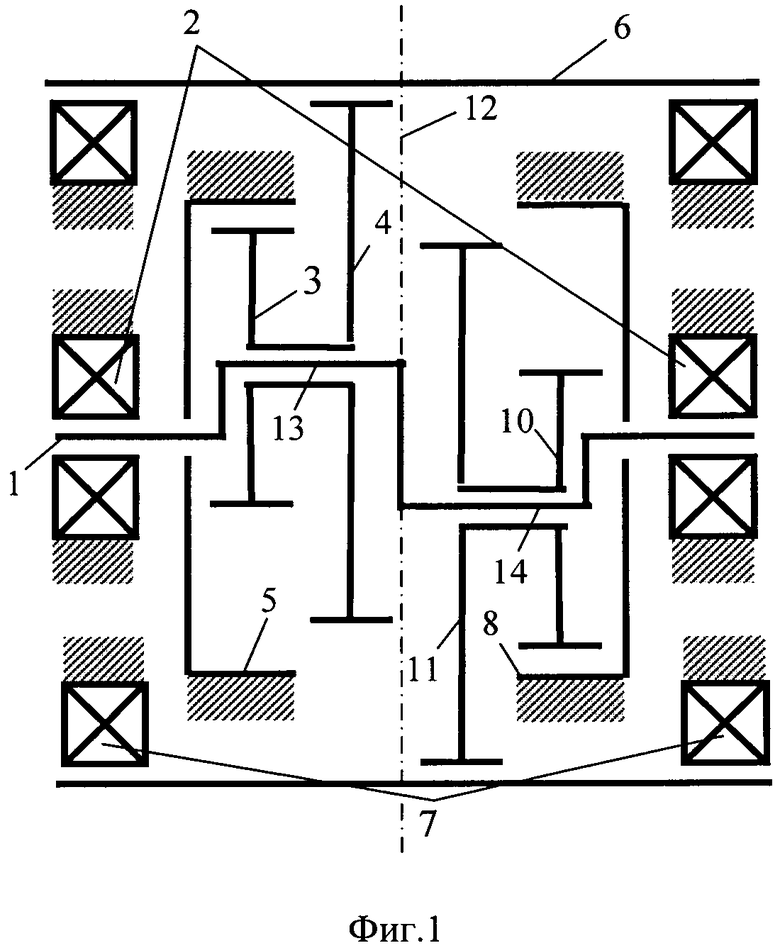
1. Планетарный редуктор, содержащий входной вал, размещенный на подшипниках, первый сателлит с первой и второй шестернями, неподвижными относительно друг друга и имеющими разное число зубьев, первый неподвижный корпус, выходной вал, размещенный на подшипниках, отличающийся тем, что в него введен второй неподвижный корпус, цевки, размещенные в неподвижных корпусах и выходном валу, также введен второй сателлит с первой и второй шестернями, неподвижными относительно друг друга, на входном валу размещены два эксцентрика, причем один из них развернут относительно другого на половину оборота относительно оси вращения входного вала, второй неподвижный корпус и второй сателлит размещены центрально симметрично, соответственно, первому неподвижному корпусу и первому сателлиту относительно точки, расположенной между двумя эксцентриками и на оси вращения входного вала, на боковой поверхности каждого эксцентрика расположена опора, с которой взаимодействует один из сателлитов, зубья шестерен сателлитов выполнены в виде циклоид, первая шестерня первого сателлита входит в зацепление с цевками в первом неподвижном корпусе, первая шестерня второго сателлита входит в зацепление с цевками во втором неподвижном корпусе, вторая шестерня каждого сателлита входит в зацепление с цевками в выходном валу, первые шестерни каждого сателлита выполнены с равным числом зубьев, вторые шестерни каждого сателлита выполнены с равным числом зубьев, неподвижные корпуса имеют одинаковое число цевок, два подшипника входного вала и два подшипника выходного вала размещены по обе стороны плоскости, перпендикулярной оси вращения входного вала и лежащей между эксцентриками.
2. Планетарный редуктор по п. 1, отличающийся тем, что опора выполнена в виде подшипника скольжения.
3. Планетарный редуктор по п. 1, отличающийся тем, что опора выполнена в виде подшипника качения.
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ РЕДУКТОР | 2003 |
|
RU2260152C2 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| JP 4046242 A, 17.02.1992. | |||

