Изобретение относится к устройствам для определения пути, пройденного оператором в заданном направлении с применением радиоэлектронных устройств, и может быть использовано в спорте, туризме, геологии и других областях народного хозяйства.
Известен путемер [1], содержащий датчик шага, формирователь импульсов, R - триггер, два счетчика, элемент ИЛИ, регистр, блок возведения в степень, два блока деления, два блока задания постоянных уставок a и b, генератор, делитель частоты и индикатор. Известное устройство позволяет измерять пройденный путь, но не позволяет определять направление движения, а следовательно, и местоположение пользователя. Это является недостатком этого устройства.
Известен автономный навигационный прибор [2], содержащий переключатель "Режим", кнопки набора данных, коммутатор - формирователь данных, регистры памяти, координат конечной точки маршрута и средней длины шага, вычислитель, ПЗУ, схему управления индикацией, индикаторы и навигационный измеритель, в который входят датчик угловой ориентации, формирователь многофазных сигналов, преобразователь, фаза-код, датчик шага и селектор шага.
Прибор позволяет определять на остановках текущие координаты xi, yi, направление движения αoi, дирекционный угол на конечную точку маршрута αк и расстояние до нее Rк, что позволяет оператору ориентироваться на местности при движении по маршруту. Однако прибор имеет сравнительно большой вес и габариты, не позволяет определять отклонение Δαi направления движения от направления на конечную точку маршрута, механический ввод магнитного склонения, что усложняет конструкцию компаса.
Это является недостатком прибора и снижает эффективность его использования.
Из известных устройств наиболее близким по технической сущности к заявляемому изобретению является автономный навигационный прибор [3], выбранный за прототип. Он содержит вычислитель, ПЗУ, ОЗУ, регистры индикации, режимы, клавиатуры, угла, схему формирования кода режима, кнопки набора данных и кнопку "Решение", схему управления индикацией, цифровые индикаторы, схему ИЛИ, навигационный измеритель, состоящий из датчика угловой ориентации, формирователя аналоговых сигналов, преобразователя фаза-код, селектора-формирователя, датчика шага и преобразователь напряжения.
Прибор-прототип позволяет осуществлять движение по маршруту, определять на остановках текущие координаты xi, yi оператора, направление его движения αoi, направление на конечную точку маршрута αк и расстояния до этой точки, вводить магнитное склонение, автоматически определять отклонение направления движения от направления на конечную точку маршрута. Однако устройство - прототип обладает рядом недостатков.
1. Большое количество органов управления на панели прибора - 12 кнопок наборного поля, которые используются только при вводе данных, переключатель "Режим". Кроме того, на панели прибора размещен магнитный компас. Размещение этих органов управления на панели прибора определяет ее сравнительно большие габариты (85 x 200 мм), а большое количество органов управления затрудняет работу оператора с прибором на маршруте.
2. Формирователь аналоговых сигналов прибора питается от двухполярного (±5 В) источника, в качестве которого используется преобразователь постоянного напряжения батареи в двухполярное напряжение. Питание формирователя и преобразователя напряжения осуществляется постоянно во время работы прибора, в то время как угол измеряется в течение нескольких МС. Это приводит к увеличению энергопотребления прибора (15 - 18 мА) и использованию энергоемких источников тока, что приводит к увеличению массы и габаритов прибора (85 x 168 x 200 мм, 2,6 кг).
3. При расчете координат xi, yi и расстояния в прибор вводится средняя длина шага оператора, которая определяется при проходе заранее известной дистанции (например, 200 м). Однако в процессе прохождения маршрута и из-за усталости оператора средняя длина шага изменяется, что приводит к ошибкам измерения его координат xi, yi и пройденного расстояния.
Указанные недостатки устройства-прототипа снижают его эффективность использования и приводят к определенным неудобствам в эксплуатации.
Техническая задача изобретения заключается в существенном уменьшении массогабаритных характеристик автономных навигационных приборов за счет сокращения органов управления и осуществления ввода данных в приборы и вывода данных из них с помощью блока ввода-вывода данных, а также повышения точности определения текущих координат оператора и расстояния до цели за счет введения в прибор индивидуальных для оператора коэффициентов (A, B), измерения его периода шага в процессе движения по маршруту и расчета текущей длины шага.
Указанная техническая задача решается так, что в автономную навигационную систему, состоящую из первого, второго, N-го автономных навигационных приборов, каждый из которых содержит датчик шага, вычислитель, шина адреса которого соединена с первыми входами ОЗУ и ПЗУ, второй вход ОЗУ, вход регистра индикации и выход регистра угла соединены с шиной данных вычислителя, входы "Чтение" ПЗУ и ОЗУ "Запись" в ОЗУ и в регистры индикации и угла "Выбор" ПЗУ, ОЗУ, регистров индикации и угла соединены с шиной управления вычислителя, выход регистра индикации через схему управления индикацией соединен с цифровыми индикаторами, навигационный измеритель, состоящий из датчика угловой ориентации, выход и вход которого соответственно соединен с первыми входом и выходом формирователя аналоговых сигналов, вторые выход и вход которого соединены соответственно с первыми входом и выходом преобразователя фаза-код, второй выход которого соединен со входом fт вычислителя, третий выход преобразователя фаза-код соединен с третьим входом регистра угла, согласно изобретению введены блок ввода-вывода данных, соединитель, схема измерения периода шага, схема выбора режима работы и электронный ключ, причем блок ввода-вывода выполнен с возможностью поочередного подключения через соединитель к первому, второму, ... N-му автономному навигационному прибору при вводе или выводе данных, вход и первый выход электронного ключа соответственно соединены с шиной управления и третьим входом формирователя аналоговых сигналов, первый, второй, третий входы схемы выбора режима работы и второй вход преобразователя фаза-код соединены с шиной управления вычислителя, четвертый и пятый входы схемы выбора режима работы соединены соответственно с выходом f3 преобразователя фаза-код и выходом датчика шага, первый выход схемы выбора режима работы соединен с первым входом схемы измерения периода шага, второй, третий и четвертый входы которой соединены соответственно с шиной управления и выходами f1 и f2 преобразователя фаза-код, выход схемы измерения периода шага соединен с шиной данных, второй и третий выходы схемы выбора режима работы соответственно соединены с шиной данных и со входом RST 7, 5 вычислителя, шина адреса которого соединена с первым, вторым, третьим, пятым, шестым, седьмым контактами соединителя, а шина данных соединена с четвертым, пятым, шестым и седьмым контактами соединителя, выходы JN 07 и OUT 04 вычислителя соединены соответственно с восьмым и девятым контактом соединителя, десятый контакт соединителя подключен ко входу RST 6, 5 вычислителя, который выполнен в виде, реализующем зависимости
xi= xi-1+li•cosαoi,
yi= yi-1+li•sinαoi,
Δαцi= αoi-αцi,
где
xi, yi - текущие координаты оператора;
αoi - угол направления движения;
αцi - угол направления на цель;
Δαцi - угол, равный разности между углом направления движения и углом направления на цель;
Rцi - расстояние от текущей точки до конечной точки маршрута (цели);
γ - магнитное склонение;
L - длина мерной дистанции - 100 м;
N1, N2 - количество шагов;
Tш1, Tш2 - периоды шага при разных темпах движения.
Блок ввода-вывода данных содержит наборное поле с кнопками 0, 1, 2, ... 9, параметр и ввод-вывод, шифратор, схемы формирования значения параметра, разряда числа, импульса записи и адреса считывания, регистры индикации и вывода данных, схему управления индикацией, цифровой индикатор, схему сопряжения и соединитель, выходы кнопок 0, 1, 2, ... 9, параметр и ввод-ввод соответственно соединены со входами 0, 1, 2, ... 9 шифратора и схем формирования значения параметра и разряда числа, выход шифратора является шиной данных и соединен с первыми входами схемы формирования импульса записи, регистров индикации, вывода данных, с выходами схемы формирования значения параметра, схемы сопряжения и с четвертым, пятым, шестым и седьмым контактами соединителя, первый выход схемы формирования разряда числа является шиной адреса записи и соединен со вторыми входами регистров индикации и вывода данных, с первым, вторым и третьим контактами соединителя, первый выход схемы формирования импульса записи соединен со входами C регистров индикации и вывод данных, выход регистра индикации через схему управления соединен с цифровыми индикаторами, второй выход схемы формирования значения параметра соединен со вторым входом схемы формирования импульса записи, второй выход которой соединен со вторым входом схемы формирования разряда числа, второй выход которой соединен с первым входом схемы формирования адреса считывания и с десятым контактом соединителя, третий вход схемы формирования импульса записи соединен с восьмым контактом соединителя, выход схемы адреса считывания соединен с четвертым входом регистра вывода данных, выход которого соединен с первым входом схемы сопряжения, второй вход которой соединен со вторым входом схемы формирования адреса считывания и с девятым контактом соединителя.
Схема выбора режима работы содержит кнопки "Компас" "Δα", тумблер "Шаг", счетверенный асинхронный RS-триггер с тремя состояниями, два трехвходовых мажораторных логических элемента, D-триггер и четырехразрядный двоичный счетчик, нормально разомкнутые и нормально замкнутые контакты кнопок "Компас" и соответственно соединены между собой и подключены к плюсу и минусу источника питания, общие контакты кнопок и тумблера подключены соответственно ко входам S2, S3, S4 счетверенного асинхронного RS-триггера, S2 и S3, входы которого через первый и второй мажоритарные элементы подключены к R-входу четырехразрядного двоичного счетчика, вход E и выходы Q1, Q2, Q3, Q4 RS-триггера соответственно являются первыми входом и выходом схемы, входы R2, R3 и R4 асинхронного RS-триггера объединены и являются вторым входом схемы, вход R D-триггера является третьим входом схемы, вход CE двоичного счетчика является четвертым входом схемы, вход S4 счетверенного асинхронного RS-триггера подключен через второй мажоритарный элемент к R-входу двоичного счетчика и является вторым выходом схемы, нормально разомкнутый контакт тумблера шаг является пятым входом схемы, выход 8 и вход C двоичного счетчика объединены и подключены ко входу C D-триггера, выход Q которого является третьим выходом схемы.
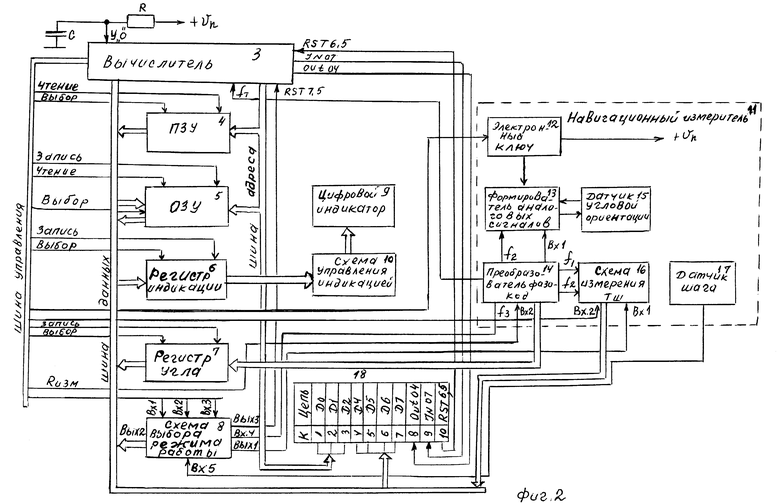
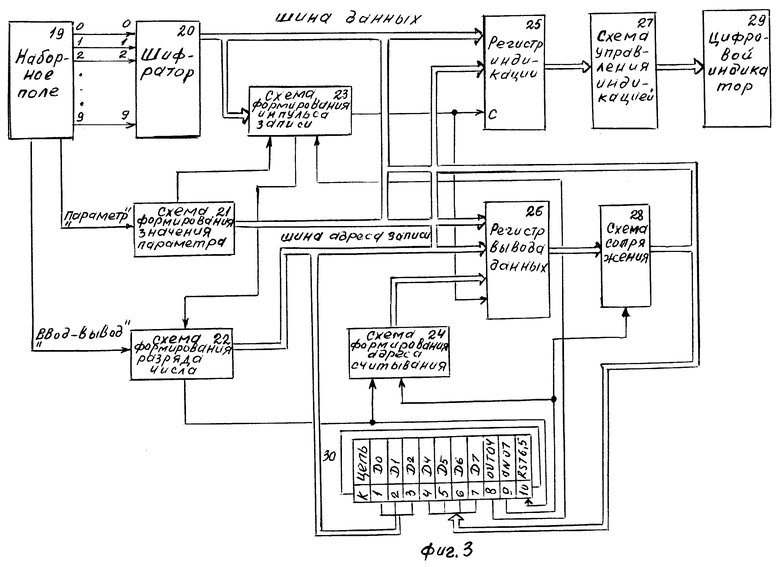
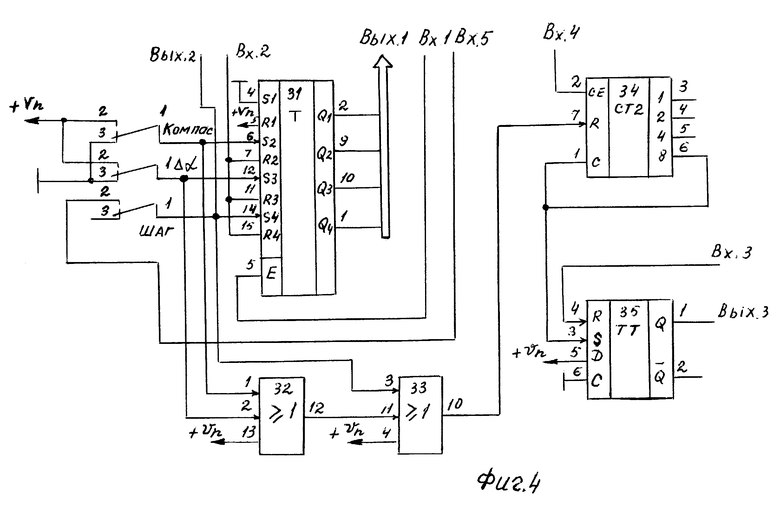
На фиг. 1 приведена функциональная схема предлагаемой автономной навигационной системы, на фиг.2 - функциональная схема автономного навигационного прибора системы, на фиг.3 - функциональная схема блока ввода-вывода данных, на фиг.4 - схема выбора режима работы, на фиг.5 и 6 приведены цифровые индикаторы автономного навигационного прибора и блока ввода-вывода данных, на фиг.7 - табл. 3 режимов работы, на фиг.8 - табл. 4 значений вводимого или выводимого параметра, на фиг.9 - 15 - соответственно примеры выполнения схемы измерения периода шага, шифратора, схема формирования импульса записи, схема формирования значения параметра, схемы формирования разряда числа, формирователя аналоговых сигналов и преобразователя фаза-код.
В автономную навигационную систему фиг.1 входят первый, второй, ... N-й автономные навигационные приборы и блок ввода-вывода данных N + 1.
В каждый автономный навигационный прибор фиг.2 входят вычислитель 3, ПЗУ 4, ОЗУ 5, регистры индикации 6, угла 7, схема выбора режима работы 8, цифровой индикатор 9, схема управления индикацией 10, навигационный измеритель 11, электронный ключ 12, формирователь аналоговых сигналов 13, преобразователь фаза-код 14, датчик угловой ориентации 15, схема измерения периода шага 16, датчик шага 17 и соединитель 18.
Вычислитель 3 шиной управления соединен со входами "Чтение" и "Выбор" ПЗУ 4, "Чтение", "Запись" и "Выбор" ОЗУ 5, со входами "Запись" и "Выбор" регистров индикации 6 и угла 7, со входами 1, 2, 3 схемы выбора режима работы 8, со входом электронного ключа 12 и четвертым входом схемы измерения периода шага 16, а шиной данных - с выходом ПЗУ 4, входом и выходом ОЗУ 5, со входом регистра индикации 6 с выходами угла 7, с первым выходом схемы выбора режима работы 8, с выходом схемы измерения периода шага 16 и контактами 4, 5, 6, 7 соединителя 18. Шина адреса вычислителя 3 соединена со входами ПЗУ 4, ОЗУ 5 и с контактами 1, 2, 3 соединителя 18. Выход регистра индикации 6 через схему управления 10 соединен с цифровым индикатором 9. Выход 2 схемы выбора режима работы 8 - со входом RST 7, 5 вычислителя 3, а входы 4, 5 - соответственно с выходом f3 преобразователя фаза-код 14, с выходом датчика шага и первым входом схемы измерения периода шага 16, f1 и f2, входы которого подключены к соответствующим выходам преобразователя фаза-код 14. Выход электронного ключа 12 соединен с первым входом формирователя аналоговых сигналов 13, второй вход и выход которого соответственно соединены со входом и выходом датчика угловой ориентации.
Блок ввода-вывода данных (фиг.3) содержит наборное поле 19, шифратор 20, схемы формирования значения параметра 21, разряда числа 22, импульса записи 23 и адреса считывания 24, регистры индикации 25 и вывода данных 26, схемы управления индикацией 27 и сопряжения 28, цифровой индикатор 29 и соединитель 30.
Выход кнопок 0, 1, 2, ... 9 и "Параметр", "Ввод-вывод" наборного поля 19 соответственно соединены со входами шифратором 20 и схем формирования значения параметра 21 и разряда числа 22. Выход шифратора 20 соединен с первыми входами схемы формирования импульса записи 23, регистра индикации 25 и вывода данных 26, с выходом схемы формирования значения параметра 21, с выходом схемы сопряжения 28 и с контактами 4, 5, 6, 7 соединителя 30, второй выход схемы формирования значения параметра 21 соединен со вторым входом схемы формирования импульса записи 23, третий вход и первый и второй выходы которой соединены соответственно с контактом 8 соединителя 30 и со входами C регистров индикации 25 и вывода данных 26 и со вторым входом схемы формирования разряда числа 22. Первый выход этой схемы соединен первым входом схемы адреса считывания 24 и с контактом 10 соединителя 30, а второй выход - со вторыми входами регистров индикации 25, вывода данных 26 и с контактами 1, 2, 3 соединителя 30. Контакт 9 соединителя 30 соединен со вторыми входами схем сопряжения 28 информирования адреса считывания 24, выход которой соединен с третьим входом регистра вывода данных 26. Выход регистра индикации 25 через схему управления индикацией 27 соединен с цифровым индикатором 29, а выход регистра вывода данных - со вторым входом схемы сопряжения 29.
Схема выбора режима работы фиг.4 содержит кнопки "Компас" "Δα", тумблер "Шаг", счетверенный асинхронный RS-триггер с тремя состояниями 31, два трехвходовых мажоритарных логических элементов 32, 33, D-триггер 34 и четырехразрядный двоичный счетчик 33. Нормально разомкнутые и нормально замкнутые контакты кнопок "Компас", "Δα" соответственно объединены между собой и подключены к плюсу и минусу источника питания. Общие контакты этих кнопок и тумблера подключены соответственно ко входам S2, S3, S4 счетверенного асинхронного RS-триггера 31, S2, S3 входы которого через мажоритарный элемент 32 подключены к R входу двоичного счетчика 33, нормально разомкнутый контакт тумблера "Шаг" является пятым входом схемы. Входы R2, R3, R4 асинхронно RS-триггера 31 объединены и являются первым входом схемы. Вход E и выходы Q1, Q2, Q3, Q4 этого триггера соответственно являются вторым входом и вторым выходом схемы. Вход CE счетчика 33 является четвертым входом схемы. Вход 8 и вход C этого счетчика соединены и подключены к C входу D-триггера 34, выход R и выход которого соответственно являются третьим входом и третьим выходом схемы.
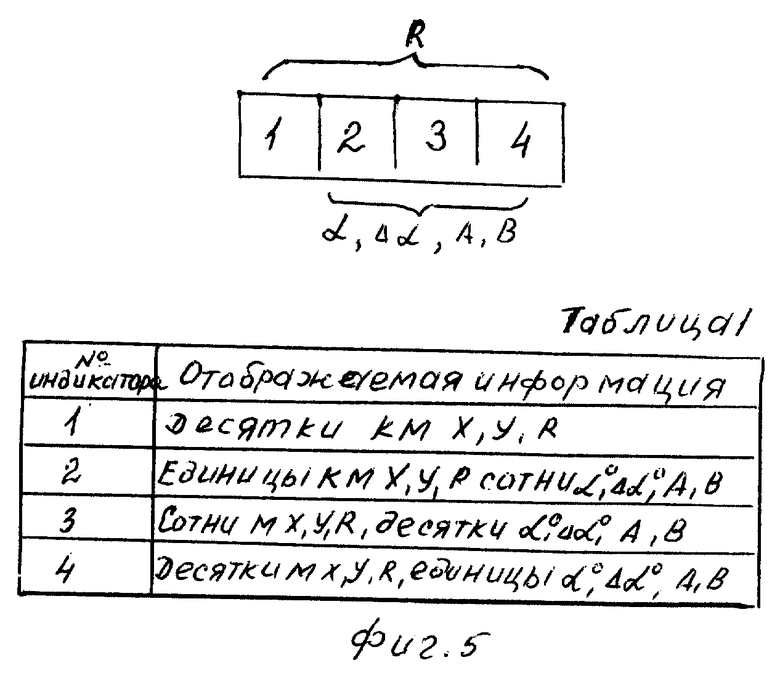
На фиг. 5 приведен цифровой индикатор прибора, содержащий четыре индикатора. Информация, отображаемая на индикаторах, и ее размерность приведена в табл. 1 фиг.5.
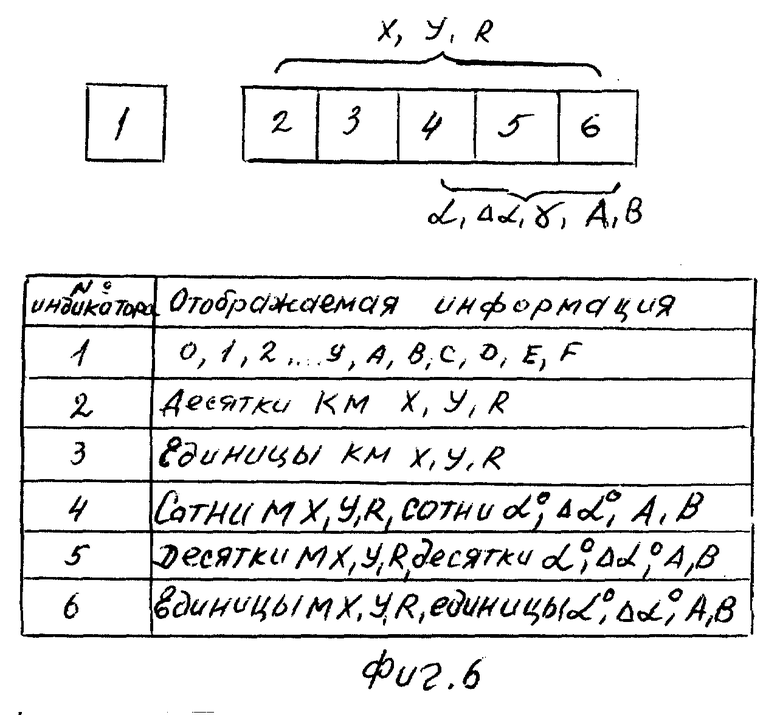
На фиг. 6 приведен цифровой индикатор блока ввода-вывода данных, содержащий 6 индикаторов. Информация, отображаемая на индикаторах, и ее размерность приведена в табл. 2 (фиг.6).
Автономная навигационная система (фиг.1) содержит несколько автономных навигационных приборов 1, 2, ... N и блок ввода-вывода данных N + 1. Рассмотрим далее работу системы на примере одного прибора 1 и одного блока N + 1, так как взаимодействия блока с другими приборами аналогичны.
Принцип работы автономной навигационной системы заключается в том, что подготовленные к работе автономные навигационные приборы через соединители поочередно подключаются к блоку ввода-вывода данных, с помощью кнопок наборного поля 19 которого вводится или выводится необходимая информация. Блок ввода-вывода данных N + 1 отключается от прибора 1, и прибор 1 готов к работе на маршруте, а блок - к соединению со следующим i-ым прибором. Таким образом, автономный навигационный прибор и блок ввода-вывода данных взаимосвязаны при вводе и выводе данных, так как функция ввода и вывода данных переданы блоку. На маршруте прибор работает самостоятельно, рассчитывая текущие координаты xi, yi расстояние до цели Rцi. отклонение главной оси прибора от направления на цель Δαцi и дирекционный угол направления движения αoi.
Автономный навигационный прибор работает следующим образом.
Включение автономного навигационного прибора (фиг. 2) осуществляется путем подсоединения к прибору блоку питания. В момент включения питания вычислитель 3 обнуляется импульсом с RC цепочки, а на его вход начнет поступать тактовая частота 500 кГц навигационного измерителя 11. При этом программа работы прибора и константы из ПЗУ 4 побайтно через шину данных по сигналам с шины управления. Выбор ПЗУ, Чтение ПЗУ запоминаются в вычислителе 3, а затем по сигналам Выбор ОЗУ и Запись ОЗУ через шину данных переписываются в ОЗУ 5.
По шине адреса вычислитель 3 формирует адрес ячейки памяти ПЗУ 4, из которой информация считывается, и адрес ячейки ОЗУ 5, в которую информация записывается. После окончания перезаписи ПЗУ 4 отключается и при работе вычислитель 3 будет обращаться только к ОЗУ 5. Перезапись информации из ПЗУ 4 осуществляется каждый раз при включении прибора, примерно, в течение 2 - 3 с и производится с целью снижения энергопотребления, так как существующие ПЗУ энергоемки. После окончания перезаписи на индикаторах прибора отображаются цифры "1996", свидетельствующие о прохождении правильной перезаписи, вычислитель 3 переходит в режим ожидания "HALT", а ПЗУ 4 отключается.
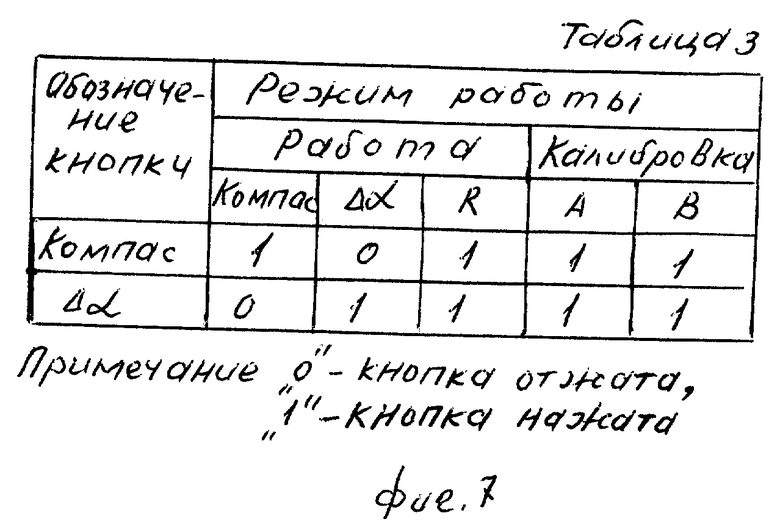
Управление прибором на маршруте осуществляется кнопками "Компас", "Δα" и тумблером "Шаг", которые размещены на передней панели. На этой панели также размещен индикатор 9, содержащий четыре цифровых индикатора. Назначение индикаторов, их расположение приведено на фиг.5. Режимы работы прибора приведены в табл. 3 фиг.7 и разбиты на две группы: 1) калибровка; 2) работа на маршруте после ввода данных. Работа прибора на маршруте связана с расчетом дирекционного угла αoi, углового отклонения главной оси прибора от направления на цель Δαцi и расстояния до цели Rцi.
В режиме калибровка с помощью прибора определяются коэффициенты A и B индивидуальные для каждого оператора.
Блок ввода-вывода данных работает следующим образом.
При включении блока на всех его индикаторах цифрового индикатора 29 отобразятся цифры "0". Нажимая и отпуская кнопку "Параметр" наборного поля 19, набрать нужное значение параметра, например "0". При каждом нажатии и отпускании этой кнопки схема формирования значения параметра 21 формирует импульс на втором выходе, который через первый выход схемы 23 по входам C регистров 25 и 26 запишет значение параметра "0" в "0" ячейку памяти этих регистров, так как на первом выходе схемы разряда числа 22 установлен "0" разряд числа. Значение параметра "0" с выхода регистра 25 через схему управления 27 отобразится на первом индикаторе на панели блока фиг.6. При нажатии и отпускании одной из кнопок 0, 1, 2, ... 9 наборного поля 19 информация о цифровом значении параметра "0" поступает на соответствующий вход шифратора 20, на выходе которого эта информация появляется в двоичном четырехразрядном коде. Эта информация по шине данных поступает на информационные входы регистров 25, 26 и схему формирования импульса записи 23, импульс с первого выхода которой установит на первом выходе схемы формирования разряда числа 22 первый разряд, а импульс со второго выхода по входам C регистров запишет информацию с информационных входов регистров 25, 26 в их первые ячейки памяти. Записанная информация с выхода регистра 25 через схему 27 отобразится на индикаторе 2 цифрового индикатора 29. При втором, третьем, четвертом и пятом нажатии одной из кнопок 0, 1, 2, ... 9 наборного поля 19 импульсами, сформированными на первом выходе схемы формирования импульса записи 23, схема формирования разряда числа 22 по второму входу будет формировать на своем первом выходе соответственно второй, третий, четвертый и пятый разряды числа. При этом на втором выходе схемы формирования импульса записи 23 будет формироваться второй, третий, четвертый и пятый импульсы, которые примерно на 10 мс задержаны относительно импульсов на ее первом выходе. Поэтому при втором нажатии и отпускании одной из кнопок набранная информация запишется в регистры 25, 26 и отобразится на 3 индикаторе, при третьем нажатии и отпускании одной из кнопок - на 4 индикаторе, а при четвертом и пятом нажатии и отпускании одной из кнопок - соответственно на пятом и шестом индикаторах . После этого на индикаторах 1, 2, 3, ... 6 фиг.6 будут отображаться параметр и его значение в виде пятизначного десятичного числа.
Аналогично набираются параметры 1, 2, ... 7 и их значения, а также параметры 8, 9, ... F и их значения.
Схема выбора режима работы 8 работает следующим образом.
При включении прибора после окончания перезаписи триггер 35 по входу C Вх3 схемы устанавливается в "0". При нажатии и отпускании одной из кнопок или двух кнопок одновременно информация о коде режима работы (табл. 3 фиг.7) запоминается триггером 31. Одновременно положительный перепад от нажатой кнопки (двух кнопок) через элементы 32 и 33 установит по входу R счетчик 34 в "0" и включить его в режим счета. При появлении уровня "1" на выходе 6 счетчика 34 он блокируется по входу "C", а триггер 35 по входу C устанавливается в "1", которая поступит на вход R T 7, 5 вычислителя 3, включая его на подпрограмму обработки прерывания.
По этой подпрограмме вычислитель 3 считывает по входу 1 информацию с триггера 31 на шину данных, анализирует код на выходах 01, 02, 03, 04 триггера 31 и переходит на подпрограмму работы, соответствующую считанному коду режима работы, обнуляет по входу 2 схемы работы режима работы триггер 31 и по входу 3 схемы - триггер 35, подготовляя схему 8 к последующей работе.
Автономная навигационная система работает следующим образом. На первом этапе подготовки системы к работе с помощью прибора в режиме калибровки определяются коэффициенты A и B. Для этого к автономному навигационному прибору подключают питание. После окончания перезаписи на индикаторах прибора отображаются цифры "1996" и оператор выходит на подготовленную заранее мерную дистанцию 100 м. В начале дистанции оператор нажимает и отпускает кнопки "Компас" и "Δα" (на индикаторах отображается слово idi 1) и включает тумблер "ШАГ". Средним темпом проходит дистанцию в одном направлении. В конце дистанции выключает тумблер "Шаг". Разворачивается, нажимает и отпускает кнопки "Компас" и "Δα" (на индикаторах отображается слово idi 2), включает тумблер "Шаг" и быстрым темпом проходит дистанцию в обратном направлении. В процессе этих проходов автономный навигационный прибор подсчитывает пройденное количество шагов N1, N2 и определяет средние периоды шага Tш1, Tш2 из выражений

В конце дистанции оператор останавливается, выключает тумблер "Шаг" и нажимает и отпускает кнопки "Компас" и "Δα" два раза.
По этой команде прибор рассчитывает коэффициенты A и B следующим образом. Как и в [3] в автономном навигационном приборе системы длина шага измеряется по формуле l = kTn, где Tп - темп движения, а K = A + BTп. Коэффициенты A и B в автономном навигационном приборе, учитывая, что коэффициент K имеет линейную зависимость от Tп, рассчитываются по известным формулам. Так, коэффициент B, как тангенс угла, образованного прямой с положительным направлением оси X, построенной по двум точкам K1, Tп1 и K2, Tп2 определяется по формуле
а коэффициент A по формуле
A = K1 - B • Tп1.
В связи с тем, что в приборе измеряется период шага Tп и количество шагов N на мерной дистанции (100 м), то эти формулы преобразуем в вид, удобный для расчета
Измерение коэффициентов A и B осуществляется только после осуществления включения автономного навигационного прибора и окончания перезаписи.
Для повторного измерения этих коэффициентов другого оператора необходимо выключать автономный навигационный прибор. Включить прибор и после окончания перезаписи измерить коэффициенты A и B.
Коэффициенты A и B хранятся в памяти прибора. Сосчитать их с прибора можно с помощью блока ввода вывода данных.
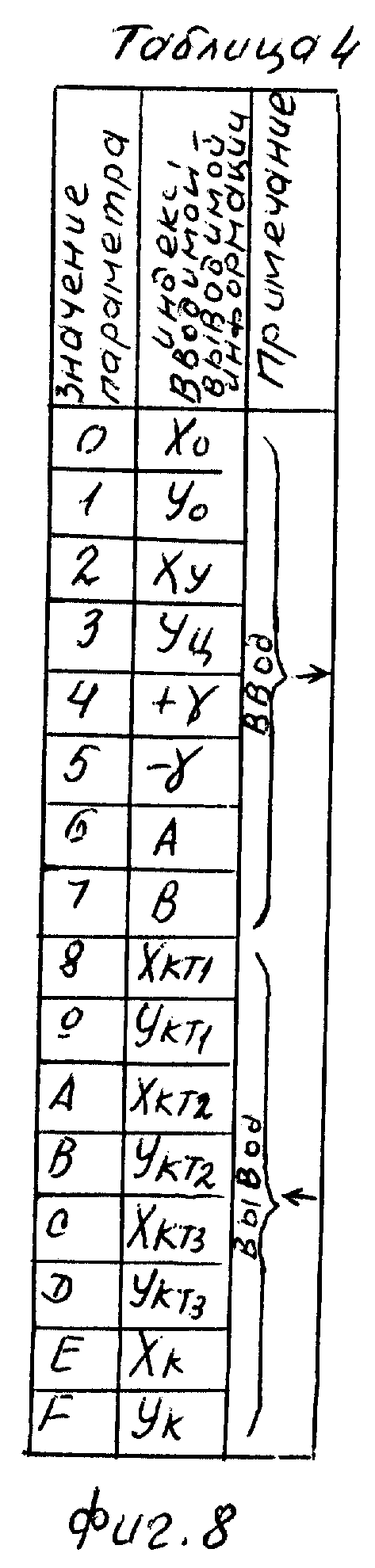
Перед выходом на маршрут автономный навигационный прибор и блок ввода-вывода данных размещают вблизи друг от друга. Включают питание на блоке ввода-вывода данных и автономном навигационном приборе, который после окончания перезаписи (на индикаторах отображает число 1996), соединяют с блоком ввода-вывода данных через соединители 18 и 30. На всех индикаторах блока ввода-вывода данных отображается цифра "0". Ввод данных в автономный навигационный прибор производится так, что в начале нажимают и отпускают кнопку "Ввод-вывод" и вводят значение параметра, который соответствует значению вводимой величины в соответствии с табл. 4 фиг.8. Значение параметра вводится путем нажатия и отпускания кнопки "Параметр" наборного поля 19 (фиг.3). При этом после нажатия и отпускания кнопки "Параметр" на первом выходе схемы формирования значения параметра 21 сформируется значение параметра, которое по шине данных поступит на информационные входы регистров 25, 26 (фиг.3). Импульс со второго выхода этой схемы формирования значения параметра 21 через схему формирования импульса записи 23 по входам C запишет эту информацию в нулевые ячейки памяти регистров 26 и 25, с выхода которого через схему управления индикацией 27 информация о набранном параметре отображается на первом индикаторе (фиг.6).
При каждом нажатии и отпускании кнопки "Параметр" формируются другие значения параметра 0, 1, 2, ... 9, A, , c, , E, F в соответствии с табл. 4 фиг. 8 и импульсы записи, записывающие эти значения в регистры 26 и 25, с выхода которого через схему управления индикацией 27 эти значения отображаются на первом индикаторе. Так как после нажатия кнопки "Ввод", "Вывод" схема формирования разряда числа 22 всегда устанавливает в "0" состояние, то значения параметра всегда записываются в "0" ячейку памяти регистров 25 и 26.
При наборе значения параметра (числа) после первого нажатия и отпускания одной из кнопок 0, 1, 2, ... 9 наборного поля 19 информация в двоичном коде о набранной цифре через шифратор 20 поступит по шине данных на информационные входы регистров 25, 26 и на вход схемы формирования импульса записи 23, с первого выхода которой сигнал поступит на второй вход схемы формирования разряда числа 22 и установит на ее выходе сигнал, соответствующий первому разряду числа. Этот сигнал по шине адреса записи устанавливает адреса первых ячеек памяти регистров 25, 26, в которые значение набранной цифры по сигналу со второго выхода схемы формирования импульса записи 23 по входам C запишется в регистры 26 и 25, с выхода которого через схему управления индикацией 27 информация о набранной цифре отобразится на втором индикаторе (фиг.6).
При последующем нажатии и отпускании одной из кнопок наборного поля 19 информация в двоичном коде о набранной цифре через шифратор 20 поступит по шине данных на информационные входы регистров 25, 26 и вход схемы формирования импульса записи 23, с первого выхода которой сигнал поступает на второй вход схемы формирования разряда числа 22 и устанавливает на ее выходе сигнал, соответствующий второму разряда числа. Этот сигнал по шине адреса записи установит адреса вторых ячеек памяти регистров 25, 26, в которые значение набранной цифры по сигналу со второго выхода схемы формирования импульса записи 23 по входам C запишется в регистры 26 и 25, с выхода которого через схему управления индикацией 27 информация о набранной цифре отобразится на третьем индикаторе. Аналогично набираются, записываются в 3, 4 и 5 ячейки памяти регистров 25, 26 и отображаются на 4, 5 и 6 индикаторах значения цифр, набираемых кнопками наборного поля 19 в 4, 5 и 6 разрядах числа. Набранный параметр и его значение отображаются на шести индикаторах (фиг.6).
Для ввода набранной информации в автономный навигационный прибор (параметр "0" и его значение) необходимо нажать и отпустить кнопку "Ввод-Вывод" наборного поля 19. Сигнал с выхода этой кнопки через схему формирования разряда числа 22 установит на шине адреса записи адрес "0" ячейки памяти регистров 25, 26 и сформирует на втором выходе этой схемы 22 сигнал RST 6, 5, который через схему формирования адреса считывания 24 установит на регистре 26 адрес "0" ячейки считывания и через контакты 10 соединителей 30 и 18 поступит на вход RST 6, 5 вычислителя 3 автономного навигационного прибора. Вычислитель 3 переходит на подпрограмму считывания данных с блока ввода-вывода данных, для чего формирует 6 импульсов IN 07. Первый импульс IN 07 считывает через схему сопряжения 28 информацию, записанную в "0" ячейку памяти регистра 26 (значение Параметр), и устанавливает через схему сопряжения 28 адрес считывания первой ячейки памяти регистра 26. Второй импульс IN 07 через схему сопряжения 28 считывает информацию, записанную в первую ячейку памяти регистра 26, через схему формирования адреса считывания 24 устанавливает адрес второй ячейки памяти регистра 26, и так далее ... шестым импульсом IN 07 через схему сопряжения 28 считывает информацию, записанную в пятую ячейку памяти регистра 26. При этом на схеме формирования адреса считывания 24 устанавливается адрес ячейки памяти, которая не используется.
После считывания информации с блока о первом параметре и его значении вычислитель 3 устанавливает "0" на всех разрядах шины данных и формирует импульс OUT 04, который через восьмые контакты соединителей 18 и 30 поступит через схему формирования импульса записи 23 на вход C регистров 25, 26, запишет эту информацию в эти регистры. Эта информация с выхода регистра 25 через схему управления индикацией 27 отобразит на всех шести индикаторах цифры "0", что свидетельствует о приеме данных с блока ввода-вывода данных и о готовности приема следующих данных. Считывание информации с блока ввода-вывода данных о параметрах 1, 2, ... 8 производится аналогично считыванию параметра "0", списанному выше.
При выводе данных из автономного навигационного прибора включенные блок ввода-вывода данных и автономный навигационный прибор подключаются через соединители 18 и 30. Нажимая и отпуская кнопку "Параметр", набрать один из параметров, например "F" (табл. 4 фиг.8), соответствующий выводимым данным. Нажать и отпустить кнопку "Ввод-вывод". Схема 22 сформирует сигнал RST 6, 5, по которому вычислитель 3 на шине данных сформирует значение набранного параметра, поступающее на информационные входы регистров 25, 26. По сигналу OUT 04 вычислитель 3 через схему формирования импульса записи 23 запишет эту информацию в регистры 25 и 26. С выхода регистра 25 через схему управления индикацией 27 эта информация отобразится на индикаторе 29. Аналогично, набирая параметр кнопкой "Параметр" и нажимая и отпуская кнопку "Ввод-вывод", отображаются другие значения параметра, выводимые из прибора.
После ввода координат начальной x0, y0 и конечной xк, yк точек маршрута магнитного склонения γ, коэффициентов A и B в прибор с помощью блока ввода-вывода данных автономный навигационный прибор готов к работе на маршруте. Причем при вводе данных и в процессе выхода в начальную точку маршрута датчик шага отключен тумблером "Шаг".
Датчиками первичной информации навигационного измерителя 11 являются датчик угловой ориентации 15, формирующий информацию о направлении движения оператора, и датчик шага 17, регистрирующий перемещение оператора на маршруте и формирующий электрический импульс при каждом его шаге. Датчик угловой ориентации 15 фазометрического типа своими входами и выходами подключен к формирователю аналоговых сигналов 13, который формирует по входным цепям датчика 15 ортогональные sinα и cosα напряжения, а также из выходных сигналов датчика 15 импульсный сигнал, несущий информацию о направлении движения и поступающим на преобразователь фаза-код 14, выполненный по типовой схеме фазометра мгновенного действия. Этот сигнал в преобразователе фаза-код 14 представляется в виде кода фаза в двоичном виде, который в вычислителе 3 с помощью констант, хранимых в ОЗУ 5, преобразуется в значения sinαoi и cosαoi для вычисления текущих координат xi, yi и значения угла αoi.
В начале маршрута тумблер "Шаг" устанавливается в положение включено и оператор начинает движение. При каждом шаге оператора в процессе движения датчик шага формирует электрический импульс, который через тумблер "Шаг" поступает на вход S4 триггера 31 через выход 1 схемы выбора режима работы 8, через третий вход микросхемы 33 устанавливает по входу R счетчик 34, выполняющий роль схемы задержки (τ ≈ 20 мс) и поступает на первый вход схемы 16.
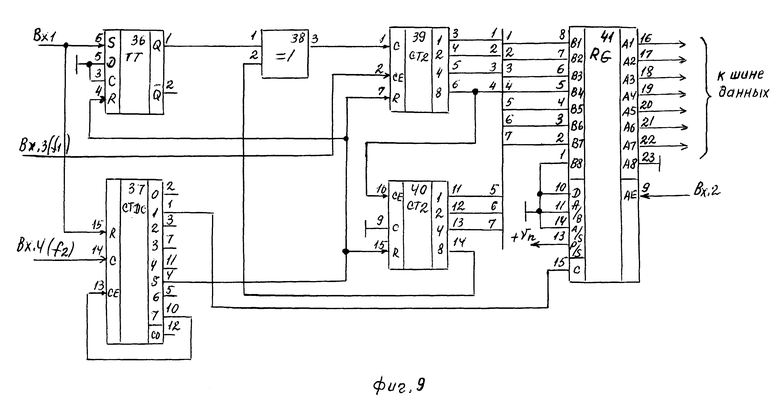
Период шага Tшi измеряется при каждом шаге схемой измерения периода шага 16, которая работает следующим образом. На вход CE счетчика 39 подается частота f1, значение которой определяет дискрету измерения Tшi, а на вход C счетчика 37 - частота f2, значение которое определяет время измерения Tшi. Импульс с датчика шага поступает на вход S триггера 36 и на вход R счетчика 37. Триггер 36 устанавливается в "1", которая с выхода 0 через микросхему 38 блокирует счетчик 39 по входу C, запрещая прохождение импульсов f1 по его входу CE. Счетчик 37 обнуляется по входу R и начинает считать импульсы f2. Импульс с первого выхода счетчика 37 запишет информацию о Tшi с выходов счетчиков 39, 40 в регистр 41 по его C входу, а импульс с его четвертого выхода установит триггер 36 и счетчика 39, 40 по входам R в "0". На входе C счетчика 39 установится "0", и счетчики 39, 40 начнут считать значение текущего периода шага.
Счетчик 37 импульсом с выхода 10 блокируется по входу C. Информация о Tшi с регистра 41 по входу AE считывается импульсом с вычислителя 3 на шину данных. Весь процесс измерения Tшi повторяется при поступлении каждого импульса с датчика шага.
В связи с тем, что выход 6 счетчика 34 соединен со входом C этого счетчика, то при появлении потенциала "1" на выходе 6 счетчик 34 запирается по входу C, и триггер 35 по входу C усиливается в "1", формируя сигнал прерывания RST 7, 5 вычислителя 3. По этому сигналу вычислитель 3 переходит на подпрограмму расчета по формулам
xi= xi-1+li•cosαoi,
yi= yi-1+li•sinαoi.
Аналогично в процессе движения оператора вычислитель 3 рассчитывает li, xi и yi при каждом его шаге.
На остановках для определения правильности движения по маршруту оператор может определить расстояние до конечной точки и направление на нее. Расстояние до конечной точки маршрута определяют путем нажатия и отпускания кнопок "Компас" и "Δα". При этом схема 8 формирует, как было описано выше, сигнал RT 7, 5, по которому вычислитель 3 анализирует код, набранный кнопками (табл. 3 фиг.7), опрашивает выходы Q1, Q2, Q3, Q4 триггера 31 и переходит на подпрограмму расчета расстояния по формуле
После выполнения этой подпрограммы вычислитель 3 переходит на подпрограмму динамической индикации рассчитанного Rцi, длительность которой около 4 с. Повторное нажатие и отпускание кнопок включает индикацию еще на 4 с.
Направление на конечную точку маршрута оператора определяет по индикатору автономного навигационного прибора 9 после нажатия и отпускания кнопки "Δα" при установке тумблера "Шаг" в положение "Откл.". Автономный навигационный прибор рассчитывает отклонение оси прибора от направления на цель по формуле
Δαцi= αoi-αцi.
При этом при отклонении против часовой стрелки (влево) на индикаторе 9 в первом разряде высвечивается символ "F", а на остальных разрядах индикатора значения угла отклонения Δαцi. При отклонении по часовой стрелке (вправо) в первом разряде высвечивается "0", а на остальных разрядах индикатора значение угла отклонения Δαцi. Ориентируясь по этим значениям и поворачиваясь вокруг своей оси, оператор добивается показаний "0" во втором, третьем и четвертом разрядах индикатора 9, устанавливает тумблер "Шаг" в положение "Вкл." и продолжает движение по маршруту.
При достижении конечной точки маршрута (R=0) оператор устанавливает тумблер "Шаг" в положение "Откл. " и нажимает и отпускает два раза кнопки "Компас" и "Δα". При этом в приборе запоминаются координаты конечной точки маршрута xк, yк. Причем координаты xк, yк устанавливаются начальными, а координаты x0, y0 - конечными.
Поэтому работа прибора при установке тумблера "Шаг" в положение "Вкл." и возвращении в начальную x0, y0 точку маршрута не отличается от движения в конечную xк, yк точку маршрута.
Когда возвращаться в начальную точку маршрута не требуется, тумблер "Шаг" остается в положении "Откл.". Информация о координатах конечной xк, yк точки маршрута считывается с помощью блока ввода-вывода данных, как было описано выше.
Предлагаемая автономная навигационная система легко реализуется на серийно выпускаемых радиокомпонентах.
На фиг. 9 показан вариант исполнения схемы измерения периода шага, которая функционально соответствует части устройства, описанного в [1].
Схема содержит триггер на микросхеме 564ТМ2, счетчик на микросхеме 564ИЕ9 и два счетчика на микросхеме 564ИЕ10, элемент исключающее ИЛИ на микросхеме 564ЛП2 и регистр на микросхеме 564ИР6.
В качестве вычислителя использован восьмиразрядный микропроцессорный комплект серии ИМ1821ВМ85А, структурная схема, система команд и назначение выводов приведены в [4] . В качестве ОЗУ и ПЗУ использованы микросхемы 537РУ17А и 573РФ4А, а в качестве индикаторов - индикатор цифровой 3ЛС339А. Схема выбора режима содержит кнопки, выполненные на микропереключателях ПМ21, два триггера на микросхемах 564ТМ2 и 564ТР2, дешифратор на микросхеме 564ИД1, счетчик на микросхеме 564ИЕ10 и элемент исключающее ИЛИ на микросхеме 564ЛП2.
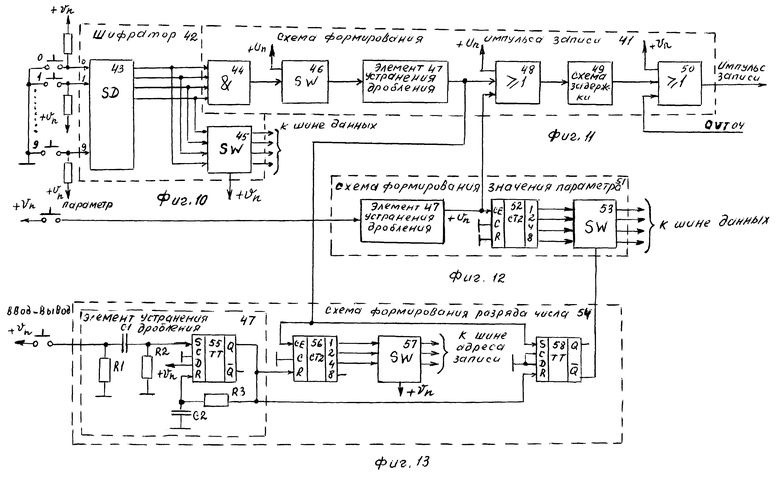
На фиг.10 показан вариант исполнения шифратора, который содержит шифратор на микросхеме 1564ИВ3, выходы которого через ключ на микросхеме 564КТ3 подключены к шине данных.
На фиг.11 показан вариант исполнения схемы формирования импульса записи. Она содержит элемент И на микросхеме 564ЛА7, ключ на микросхеме 564КТ3, элемент устранения дробления сигнала от кнопки, два трехвходных мажоритарных логических элемента на микросхеме 564ЛП13 и схему задержки на микросхеме 564ТМ2.
На фиг.12 показан вариант исполнения схемы формирования значения параметра, содержащий элемент устранения дробления, счетчик на микросхеме 564ИЕ10 и ключи на микросхеме 564КТ3, а на фиг.13 - вариант исполнения схемы формирования разряда числа.
Элемент устранения дробления сигнала кнопки состоит из RC-цепочки и формирователя на микросхеме 564ТМ2. Счетчик и ключ выполнены на микросхемах 564ИЕ10 и 564КТ3.
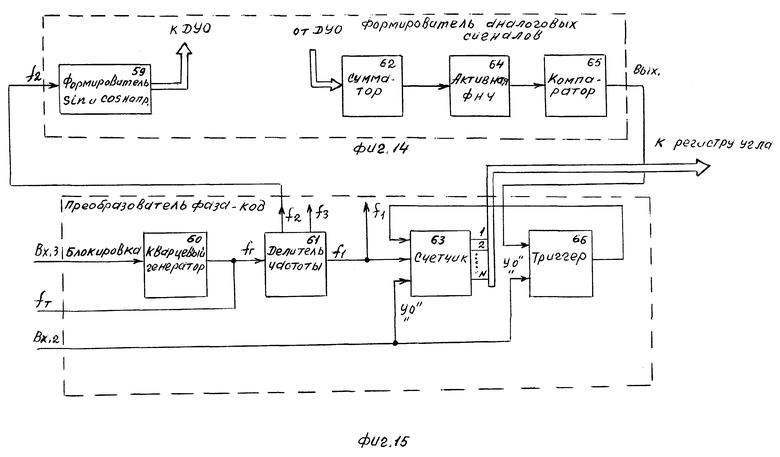
На фиг.14 показан вариант исполнения формирователя аналоговых сигналов, формирователь синусоидальных и косинусоидальных напряжений для питания датчиков Холла (ПХЭ602117А) датчика угловой ориентации выполнен на микросхемах 564ТМ2, 564ПУ6, 1Н251, 2Т622А и двух трансформаторах, согласующих низкое входное напряжение преобразователей Холла (5 - 10 Ом) с выходными сопротивлениями ключей (≈ 100 Ом). Сумматор, активный фильтр и компаратор выполнены на микросхеме 1401УД2А.
Преобразователь фаза-код, вариант исполнения которого показан на фиг.15, содержит кварцевый генератор, собранный на микросхеме 564ЛЕ5 и кварце РК-230 с частотой 500 кГц, делитель частоты и счетчик на микросхемах 564ИЕ10 и триггер на микросхеме 564ТМ2.
Датчик угловой ориентации (фиг.3) содержит намагниченный чувствительный элемент в виде кольцевого магнита с подпятником в центре, который установлен на оси, закрепленной в основании корпуса, выполненного в виде стакана. С противоположной стороны основания корпуса установлены через 90o четыре преобразователя Холла, с которых снимаются электрические сигналы, зависящие от углового положения датчика.
Датчик шага (фиг. 2) выполнен аналогично датчику, описанному в [2]. Он содержит корпус, в котором консольно установлена плоская пружина, на которой закреплена ферромагнитная пластина и на конце постоянный магнит, взаимодействующий с герконом. Контактный узел датчика шага - магнит и геркон, установленный неподвижно в зоне действия магнита. При ходьбе магнит устанавливается в верхнее и нижнее положения при каждом шаге, замыкая контакты геркона, и формирует электрический импульс.
Практическое использование автономной навигационной системы по сравнению с прибором-прототипом за счет разделения функций работы с прибором на маршруте и вводе-выводе данных позволяет существенно сократить количество органом управления до трех и количество индикаторов до четырех (у прототипа 15 и 8), с помощью блока ввода-вывода данных (масса 0,37 кг, габариты 32 x 30 x 132 мм) существенно облегчить ввод в прибор и вывод из него соответствующих данных, ввод данных в приборы и вывод данных из них осуществить последовательно с помощью одного блока ввода-вывода данных, что существенно сокращает материальные затраты при создании автономной навигационной системы, существенно улучшить массогабаритные характеристики носимого автономного навигационного прибора масса 0,6 кг, габариты 32 x 120 x 160 мм (у прототипа 2,6 кг и 85 x 168 x 200 мм) за счет применения малогабаритного датчика угловой ориентации диаметр 22 и высота 14 мм (у прототипа 70 и 85 мм) и аккумуляторов меньшей емкости НКГЦ-0,45 (НКГЦ-1,8 у прототипа).
Указанные преимущества позволяют существенно облегчить работу оператора с прибором на маршруте, вводе-выводе данных и повысить эффективность использования автономной навигационной системы.
Изготовленные опытные образцы показали высокие точностные характеристики, простоту в управлении и не стесняли действия оператора в процессе движения.
Источники информации
1. А.С. СССР, N 1434259, МПК G 01 C 22/00.
2. Изделие АНП-2к. Техническое описание и инструкция по эксплуатации. ФР2.511.000ТО, 1984.
3. Патент РФ N 2039955, МПК G 01 C 22/00.
4. А.С. Басманов, Ю.Ф. Широков. Микропроцессоры и однокристальные микроЭВМ: номенклатура и функциональные возможности. М.: Энергоиздат, 1988, с. 6 - 23.
5. Микросхемы интегральные. Серия 564. ОСТ 11 340.907-80.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1992 |
|
RU2039935C1 |
| СИСТЕМА ВНУТРИКОРАБЕЛЬНОЙ ГРОМКОГОВОРЯЩЕЙ СВЯЗИ И ТРАНСЛЯЦИИ | 1996 |
|
RU2131168C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА НЕПОДВИЖНЫХ ИЗОБРАЖЕНИЙ ПО КАНАЛАМ ЭЛЕКТРИЧЕСКОЙ СВЯЗИ | 1990 |
|
RU2007051C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТЫ ОПЕРАТОРА | 1991 |
|
RU2020597C1 |
| Устройство для профессионального отбора операторов | 1990 |
|
SU1778768A1 |
| УСТРОЙСТВО ДЛЯ ПРОФЕССИОНАЛЬНОГО ОТБОРА ОПЕРАТОРОВ | 1991 |
|
RU2020604C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ СЕНСОМОТОРНЫХ НАВЫКОВ ОПЕРАТОРА | 1991 |
|
RU2017227C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ОПЕРАТОРОВ | 1991 |
|
RU2020599C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДИАГНОСТИРОВАНИЯ ЦИФРОВЫХ УСТРОЙСТВ | 1994 |
|
RU2097827C1 |
Автономная навигационная система для определения пути, пройденного пешим оператором в заданном направлении с применением радиэлектронных устройств, может быть использована в спорте, туризме и других областях. Автономная навигационная система содержит N автономных навигационных приборов и блок ввода-вывода данных. Каждый автономный навигационный прибор содержит вычислитель, ПЗУ4, ОЗУ, регистр индикации, регистр угла, схему выбора режима работы, цифровые индикаторы, схему управления индикаторами, навигационный измеритель, электронный ключ, формирователь аналоговых сигналов, преобразователь фаза-код, датчик угловой ориентации, схему измерения периода шага, датчик шага и соединитель. Уменьшаются массогабаритные характеристики автономных навигационных приборов за счет сокращения органов управления и осуществления ввода-вывода данных с помощью блока ввода-вывода данных, повышается точность определения текущих координат оператора и расстояние до цели за счет ввода в прибор индивидуальных для оператора коэффициентов А и В, измерения его периода шага и расчета текущей длины шага. 2 з.п. ф-лы, 15 ил.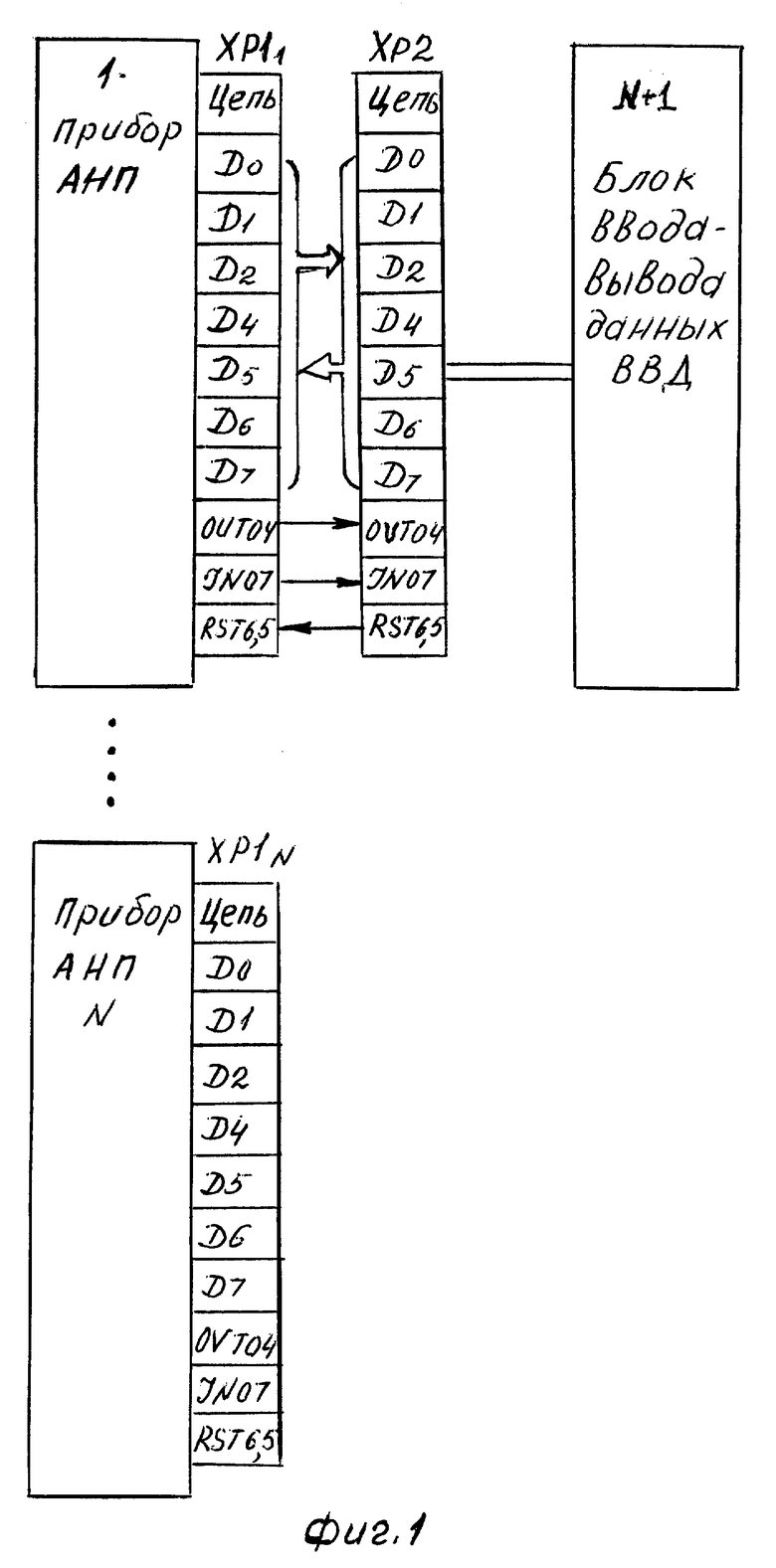
xi= xi-1+li•cosαoi,
yi= yi-1+li•sinαoi,
Δαцi= αoi-αцi,
где xi, yi - текущие координаты оператора;
αoi - угол направления движения;
αцi - угол направления движения на цель;
Δαцi - угол, равный разности между углом направления движения и углом направления на цель;
Rцi - расстояние от текущей точки до конечной точки маршрута (цели);
γ - магнитное склонение;
L - длина мерной дистанции (100 м);
N1, N2 - количество шагов при разных темпах движения; Tш1, Tш2, - периоды шагов при разных темпах движения.
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1992 |
|
RU2039935C1 |
| ФОРМИРОВАТЕЛЬ ПАЧКИ ИМПУЛЬСОВ | 1997 |
|
RU2121219C1 |
| Путемер | 1986 |
|
SU1434259A1 |
