Изобретение относится к устройствам для определения пути, пройденного человеком в заданном направлении с применением радиоэлектронных устройств, и может быть использовано в спорте, туризме и других областях.
Известно устройство, содержащее датчик шага, формирователь импульсов датчика шага, генератор импульсов, элемент И, двоичный умножитель, двоичный и десятичный счетчики, блок ввода масштабного коэффициента и цифровой индикатор. В исходном состоянии двоичный и десятичный счетчики обнулены, а на управляющих входах двоичного умножителя действует параллельный двоичный код, пропорциональный значению средней длины шага пользователя, введенный в устройство с помощью блока ввода масштабного коэффициента. При движении по маршруту срабатывает датчик шага, электрический сигнал с которого поступает на формирователь импульсов. На выходе этого формирователя появляется сигнал высокого уровня заданной длительности, в течение которого через схему И проходят импульсы частоты fо генератора, которые поступают на вход двоичного умножителя. В результате умножения частоты fo генератора на параллельный двоичный код длины шага на выходе умножителя на каждом шаге формируются пачки импульсов с числом импульсов в каждой пачке, пропорциональным средней длине перемещения. Эти импульсы суммируются в двоичном счетчике и в момент его переполнения поступают на вход десятичного счетчика. Объем двоичного счетчика выбран таким, что сигнал переполнения на его выходе соответствует наполнению 1 м. Контроль пройденного расстояния осуществляется по цифровому индикатору, на входы которого поступает информация с выходов десятичного счетчика.
Известное устройство позволяет измерять пройденное расстояние и не позволяет определять направление движения, а следовательно, не позволяет определять местоположение пользователя, что является недостатком этого устройства.
Известен цифровой компас, содержащий двухосевой магнитоэлектрический датчик и процессор для определения пеленгов, вычисляющий пеленг для местной индикации или записи. Процессор для определения пеленгов содержит аналого-цифровой преобразователь, предназначенный для измерения соотношения сигналов, соответствующих осям Х и Y (меньшее делится на большее), поступающих с вышеупомянутого магнитоэлектрического датчика. Программируемый блок памяти, управляемый сигналами с выходных линий аналого-цифрового преобразователя, содержит функцию арктангенсов для углов от 0 до 90о. Выходные линии данных блока памяти определяют угол смещения сектора в диапазоне от 0 до 90о, который впоследствии прибавляется к главному руббу, образующему в пеленге нижнюю границу выходного пеленга.
Таким образом, цифровой компас с процессором, использующий для определения пеленга метод вычисления соотношений, позволяет определять направление движения и отображать пеленг в аналого-цифровой системе. Однако этот компас не осуществляет определение пройденного пути, что является его недостатком.
Из известных устройств наиболее близким по технической сущности является автономный навигационный прибор.
Устройство-прототип позволяет на остановках определять текущие координаты XiYi, направление движения, дирекционный угол на конечную точку маршрута αк и расстояние до нее Rк, что позволяет оператору ориентироваться на местности при движении по маршруту.
Однако устройство-прототип обладает рядом недостатков и не позволяет автоматически определять отклонения Δ αi направления движения αi по маршруту от направления на конечную точку маршрута αк.
Практически при движении по маршруту часто приходится изменять направление движения при обходе препятствий. Для определения отклонения от курса на конечную точку необходимо при каждом изменении направления движения определять направление движения αi и запомнить это значение. Затем определить направление движения на конечную точку αк. После этого вычислить отклонение от курса Δ αi=αк αi При необходимости частого определения отклонения от курса в связи с этим усложняются действия при эксплуатации прибора.
Особенно это будет сказываться при необходимости движения в "узком коридоре" по намеченному заранее на карте маршруту, где отклонение от курса на несколько градусов может вызвать экстремальную ситуацию.
Устройство-прототип не позволяет учитывать при прохождении маршрута рельеф местности. Как известно, при прохождении уклона шаг увеличивается, а при прохождении подъема уменьшается. Это связано с тем, что пройденный путь на наклонном участке маршрута является гипотенузой прямоугольного треугольника, а приращение координаты ΔХiявляется проекцией приращения координаты ΔХi на поверхность земли, то есть, Δ Xiист=ΔХi ˙cos β где β угол наклона рельефа местности. Невозможность учета в прототипе изменения средней длины шага, в свою очередь, приведет к ошибкам при вычислении приращений ΔХi и ΔYi, а следовательно, и к ошибкам вычисления текущих координат и направления на конечную точку маршрута и дальности до нее. Устройство-прототип не позволяет возвратиться в исходную точку Хн, Yн из какой-либо или из конечной точки маршрута в начальную точку маршрута без обновления исходных данных. Это особенно важно при выполнении движения от базового пункта (например, база геологов) к пункту проведения изысканий и возвращений на базу после проведения работ. В этом случае необходимо вновь ввести координаты текущей Xi и Yiили конечной Хк, Yк точки, координаты начальной точки Хн, Yн, среднюю длину шага lср, рассчитать по прибору αн и Rн, сориентироваться в нужном направлении и начать движение. Это вызывает необходимость запоминать или записывать (в планшет) координаты начальной точки и тратить на ввод и расчет параметров движения, что вызывает определенные неудобства в эксплуатации.
Кроме того, учет магнитного склонения γ для обеспечения соответствия между показаниями компаса и топографической картой в устройстве-прототипе осуществляется механически, путем поворота датчика угловой ориентации относительно корпуса прибора. Поэтому приходится в этом случае обеспечивать возможность поворота датчика, его жесткой фиксации после поворота, обеспечив при этом брызгозащищенность поворотного узла, чтобы при эксплуатации в тяжелых климатических условиях атмосферные осадки не попадали внутрь прибора. Это усложняет конструкцию прибора.
Указанные недостатки устройства-прототипа снижают эффективность его работы и приводят к определенным неудобствам в эксплуатации.
Целью изобретения является автоматизация вычисления угла отклонения от заданного направления движения, обеспечение движения по маршруту в прямом и обратном направлениях без обновления исходных данных и учет рельефа местности и магнитного склонения.
Цель достигается тем, что в автономный навигационный прибор, содержащий схему управления индикацией, выходы которой соединены с входами цифровых индикаторов, переключатель "Режим", кнопки набора данных, ПЗУ, вычислитель, навигационный измеритель, состоящий из датчика угловой ориентации, вход и выход которого соответственно соединены с первыми входом и выходом формирователя многофазных сигналов, вторые вход и выход которого соответственно соединены с первым входом и выходом преобразователя фаза-код, датчик шага, выход которого через селектор-формирователь подключен к второму входу преобразователя фаза-код, дополнительно введены три дополнительных положения Δ α ПН и УКЛ переключателя "режим", ОЗУ, регистры индикации, режима, клавиатуры и угла, схема формирования кода режима и схема ИЛИ, причем второй и третий выходы преобразователя фаза-код соединены соответственно с первым входом регистра угла и первым входом вычислителя, выходы переключателя "режим" через схему формирования кода режима подключены к первому входу регистра режима, первый выход кнопок наборного поля подсоединен к первому входу регистра клавиатуры, первые входы ПЗУ и ОЗУ соединены с шиной адреса вычислителя, входом регистра режима, выход ПЗУ, второй вход и выход ОЗУ, вход регистра индикации и выходы регистров режима, клавиатуры и угла соединены с шиной данных вычислителя, входы "Чтение" ПЗУ и ОЗУ, входы "Запись и выбор" ОЗУ и регистров индикации, режима, клавиатуры и угла соединены с шиной управления вычислителя, выход регистра индикации соединен со схемой управления цифровыми индикаторами, а вторые выходы кнопок набора данных и схемы формирования кода режима через схему ИЛИ соединены с вторым входом вычислителя, который выполнен в виде, реализующем зависимости:
Xiпр=Хi-1+Кш (β) ˙ lcp ˙ cos αoi ˙ cos β,
Yiпр=Yi-1+Kш (β) ˙ lcp ˙ sin αoi ˙ sin β
Xiобр=Хi-1+Кш (β) ˙ lcp ˙ cos αoi ˙ cos β
Yiобр=Yi-1+Кш (β) ˙ lcp ˙ sin αoi ˙ sin β ,
αкi=γ+arccos αнi=arccos
αнi=arccos Δαкi=αoi-αкi
Δαкi=αoi-αкi
Δαнi=αoi-αнi, Rк=  Rн=
Rн=
где Хн, Yн, Xi, Yi, Xк, Yк координаты начальной, текущей и конечной точек маршрута;
αoi угол направления движения;
αнi αкi текущие углы направления движения на начальную и конечную точки маршрута,
Δ αнi Δ αкi углы, равные разности между направлением движения и направлением на начальную и конечную точки маршрута соответственно;
Rнi, Rнi расстояние от текущей точки до начальной и конечной точки маршрута соответственно;
lср средняя длина шага оператора;
γ магнитное склонение;
β угол наклона (подъема) рельефа местности предполагаемого участка маршрута;
Кш( β ) функция изменения длины шага от крутизны рельефа местности.
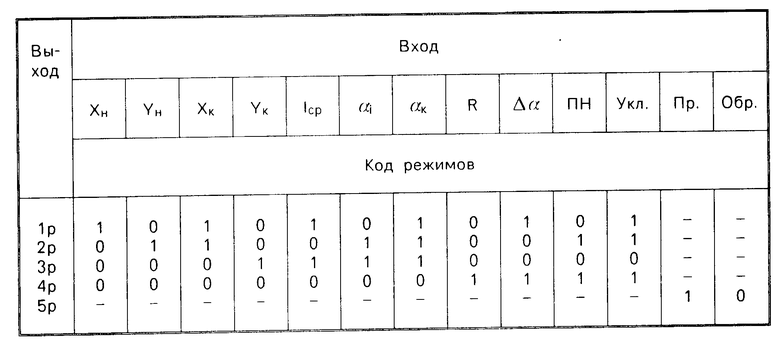
Схема формирования кода режима содержит тумблер Пр/Обр, девять элементов ИЛИ и пять элементов И, причем нормально разомкнутый, нормально замкнутый и общий выводы тумблера Пр/Обр соответственно соединены с корпусом, плюсом источника питания и с входом первого элемента И, выход которого является выходом пятого разряда схемы, первые входы первого, второго, пятого и седьмого элементов ИЛИ являются соответственно входами Хн, Yн, Yк и R схемы, второй вход первого элемента ИЛИ соединен с вторым входом третьего элемента ИЛИ и является входом Хк схемы, третий вход первого элемента ИЛИ соединен с вторым входом пятого элемента ИЛИ и является входом lср схемы, первый вход второго элемента ИЛИ соединен с первым входом четвертого элемента ИЛИ и вторым входом шестого элемента ИЛИ и является входом αк схемы, третий вход третьего элемента ИЛИ соединен с первым входом шестого элемента ИЛИ и является входом αi схемы, второй вход второго элемента ИЛИ соединен с вторым входом седьмого элемента ИЛИ и является входом Δ α схемы, второй вход четвертого элемента ИЛИ соединен с первым входом восьмого элемента ИЛИ и является входом ПН схемы, третий вход второго элемента ИЛИ соединен с третьим входом четвертого элемента ИЛИ и вторым входом восьмого элемента ИЛИ и является входом УКЛ схемы, выходы первого и второго элементов ИЛИ соединены с входами второго элемента И, выход которого соединен с первым входом девятого элемента ИЛИ и является выходом первого разряда схемы, выходы третьего и четвертого элементов или соединены с входами третьего элемента И, выход которого соединен с вторым входом девятого элемента ИЛИ и является выходом второго разряда схемы, выходы пятого и шестого элементов ИЛИ соединены с входами четвертого элемента И, выход которого соединен с третьим входом девятого элемента ИЛИ и является выходом третьего разряда схемы, выходы седьмого и восьмого элементов ИЛИ соединены с входами пятого элемента И, выход которого соединен с четвертым входом девятого элемента ИЛИ и является выходом четвертого разряда схемы, а выход девятого элемента ИЛИ является вторым выходом схемы.
Сравнительный анализ с прототипом показывает, что заявляемый прибор отличается наличием элементов: трех дополнительных Δ α ПН, УКЛ положений переключателя "Режим", тумблера Пр/Обр, ОЗУ, регистров индикации, режима клавиатуры и угла схемы формирования кода режима, схемы ИЛИ с соответствующими связями, и не известно из уровня техники. Таким образом, изобретение соответствует критерию "Новизна".
Анализ известных технических решений (аналогов) в исследуемой и смежных областях позволяет сделать вывод, что введенные функциональные узлы известны. Однако введение их в автономный навигационный прибор с указанными связями придает этому прибору новые свойства. Введенные функциональные узлы взаимодействуют таким образом, что при установке тумблера Пр/Обр в положение "Прямо", а переключателя "Режим" в положение Δ α автоматически вычисляется и индицируется на цифровых индикаторах отклонение от направления на конечную точку маршрута (значение Δ αi) в любой точке маршрута. Поэтому, поворачиваясь на месте с прибором, можно добиться, чтобы Δ αi=0, и начать двигаться в этом направлении; в любой точке маршрута при установке тумблера Пр/Обр в положение "Обр" обеспечивается возможность движения без обновления данных движения в направлении к начальной точке маршрута за счет автоматического вычисления отклонения от направления на начальную точку маршрута; в положениях переключателя "Режим" "ПН" и "УКЛ" с помощью кнопок набора данных обеспечивается ввод угла γ магнитного склонения и угла β уклона или подъема для использования этих значений в дальнейших вычислениях.
Таким образом, изобретение соответствует критерию "Изобретательский уровень".
Изобретение может использоваться в различных отраслях народного хозяйства и соответствует критерию "Промышленная применимость".
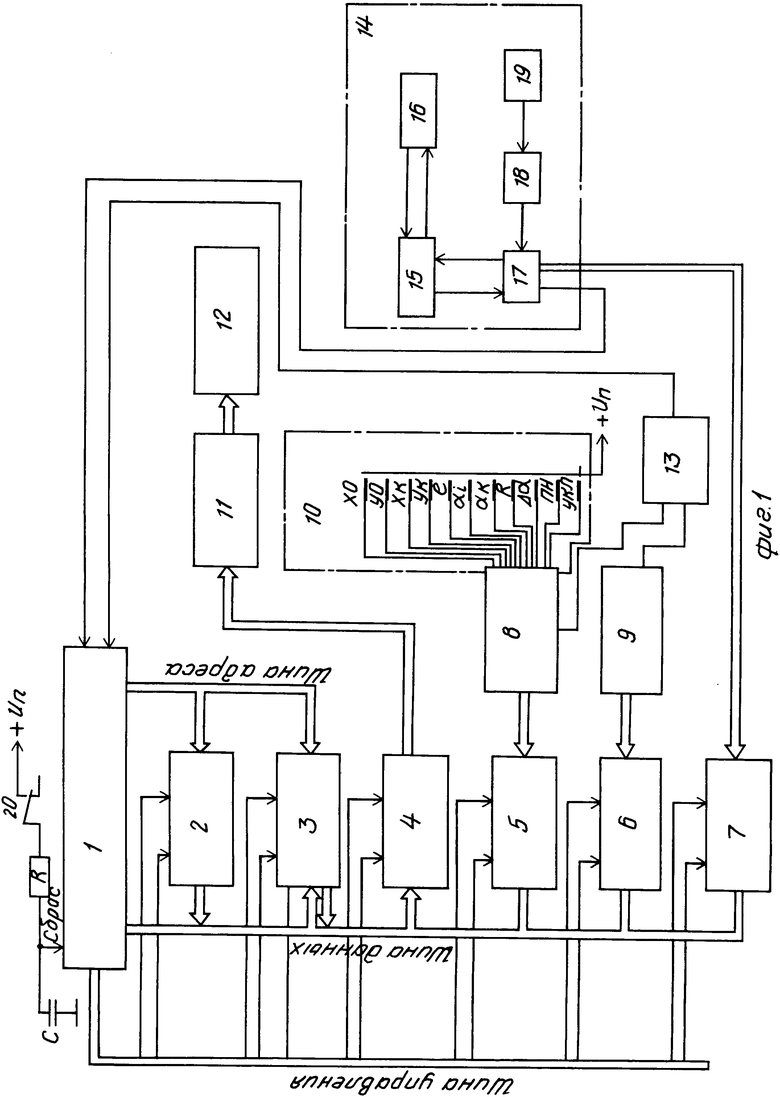
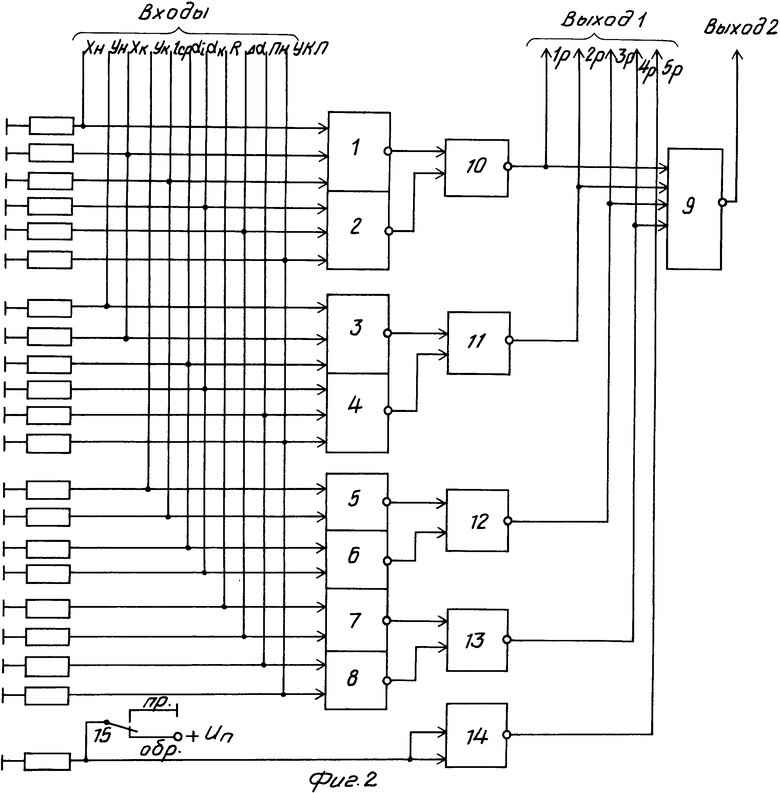
На фиг. 1 показана функциональная схема предлагаемого автономного навигационного прибора; на фиг. 2 схема формирования кода режима.
Устройство содержит вычислитель 1, ПЗУ 2, ОЗУ 3, регистры 4 индикации, режима 5, клавиатуры угла 7, схему 8 формирования кода режима, кнопки 9 набора данных, переключатель "Режим" 10, схему 11, управления индикаторами, цифровые индикаторы 12, схему или 13, навигационный измеритель 14, формирователь 15 многофазных сигналов, датчик 16 угловой ориентации, преобразователь 17 фаза-код, селектор-формирователь 18, датчик 19 шага.
Вычислитель 1 шиной управления соединен с входами "Чтение", и "Выбор" ПЗУ 2, "Запись", "Чтение" и "Выбор" ОЗУ 3, с входами "Запись" и "Выбор" регистров 4 индикации, режима 5 клавиатуры 6 и угла 7, а шиной данных с выходом ПЗУ 2, входом и выходом ОЗУ 3, с входом регистра 4 индикации и с выходами регистров 5 режима, клавиатуры 6 и угла 7. Шина адреса вычислителя 1 соединена с вторыми входами ПЗУ 2 и ОЗУ 3. Выход регистра 4 индикации через схему 11 управления индикаторами соединен с входами цифровых индикаторов 12. Выходы переключателя 10 через схему 8 формирования кода режима соединены с вторыми входами регистра режима. Первые выходы кнопок 9 набора данных соединены с входом регистра клавиатуры. Вторые входы схемы 8 формирования кода режима и кнопок 9 через схему ИЛИ 13 соединены с входом RST вычислителя 1. Датчик 16 угловой ориентации своим входом и выходом соединен с первыми входом и выходом формирователя 15 многофазных сигналов, вторые вход и выход которого соединены с первым выходом и первым входом преобразователя 17 фаза-код, выход датчика 19 шага через селектор-формирователь 18 соединен с вторым входом преобразователя 17 фаза-код, второй и третий выходы которого соединены соответственно с входом ТRAP вычислителя 1 и с входом регистра 7 угла.
Схема 8 формирования кода режима содержит девять элементов ИЛИ 1,2.9, пять элементов И 10, 11.14 и тумблер Пр/Обр 15. Нормально разомкнутый, нормально замкнутый и общий вывод тумблера Пр/Обр соединены соответственно с корпусом, плюсом источника питания и с входом элемента И 14, выход которого является выходом пятого разряда схемы 8. Первые входы элементов ИЛИ 1,2.9 являются соответственно входами Хн, Yн, Yк и R схемы 8, второй вход элемента ИЛИ 1 соединен с вторым входом элемента ИЛИ 3 и является входом Хк схемы 8, третий вход элемента ИЛИ 1 соединен с вторым выходом элемента ИЛИ 5 и является входом lср схемы 8, первый вход элемента ИЛИ 2, соединен с первым входом элемента 4 и вторым входом элемента ИЛИ 6 и является входом αк схемы 8, третий вход элемента ИЛИ 3 соединен с первым входом элемента ИЛИ 6 и является входом αi схемы 8, второй вход элемента ИЛИ 2 соединен с вторым входом элемента ИЛИ 7 и является входом Δ α схемы 8, второй вход элемента ИЛИ 4 соединен с первым входом элемента ИЛИ 9 и является входом ПР схемы 8, третий вход элемента ИЛИ 2 соединен с третьим входом элемента 4 и вторым входом элемента ИЛИ 8 и является входом УКЛ схемы 8, выходы элементов ИЛИ 1, 2 соединены с входами элемента И 10, выход которой соединен с первым входом элемента ИЛИ 9 и является выходом первого разряда схемы 8, выходы элементов ИЛИ 3, 4 соединены с входами элемента И 11, выход которой соединен с вторым входом элемента ИЛИ 9 и является выходом второго разряда схемы, выходы элементов ИЛИ 5,6 соединены с входами элемента И 12, выход которой соединен с третьим входом элемента ИЛИ 9 и является выходом третьего элемента схемы 8, выходы элементов ИЛИ 7, 8 соединены с входами элемента И 13, выход которой соединен с четвертым входом элемента ИЛИ 9 и является выходом четвертого разряда схемы 8, а выход элемента ИЛИ 9 является вторым выходом схемы 8.
Устройство работает следующим образом.
При включении питания прибора по сигналу "Сброс", формируемому RC-цепочкой, вычислитель 1 подготавливается к работе. При этом программа работы и константы из ПЗУ 2 побайтно через шину данных по сигналам с шины управления "Выбор ПЗУ" и "Чтение ПЗУ" запоминаются в вычислителе 1, а затем по сигналам с шины управления "Выбор ОЗУ" и "Запись ОЗУ" через шину данных переписываются в ОЗУ 3. Перезапись информации из ПЗУ в ОЗУ осуществляется с целью снижения энергопотребления, так как существующие ПЗУ энергоемки. По шине адреса вычислитель формирует адрес ячейки памяти, из которой информация считывается, и адрес ячейки записи информации. По окончании подпрограммы перезаписи из ПЗУ 2 и ОЗУ 3 ПЗУ 2 отключается, а вычислитель 1 выходит на выполнение подпрограммы динамической индикации, в которой участвуют вычислитель 1 и ОЗУ 3. Из ОЗУ 3 по сигналам "Выбор ОЗУ" и "Чтение ОЗУ" через шину данных из ячеек памяти, отведенных под хранение индицируемой информации, данные по сигналам "Выбор регистра индикации" и "Запись в регистр" записываются в регистр индикации. Вычислитель 1 формирует код опрашиваемого в данный момент индикатора, который записывается через шину данных в регистр 4 индикации и меняется со скоростью динамического опроса каждого индикатора, пока на вычислитель 1 не придет сигнал прерывания ТRAP и RST.
Управление работой прибора осуществляется переключателем 10 "Режим" кнопками 9 набора данных, схемой 8 формирования кода режима и тумблером Вкл/Откл.
Режимы работы прибора разбиты на две группы и задаются переключателем 10 "Режим" и схемой 8 формирования кода режима. В первой группе переключатель 10 "Режим" имеет положения Хн, Yн, Хк, Yк "Шаг", ПН и УКЛ, в которых осуществляется ввод координат начальной Хн, Yн и конечной Хк, Yк точек маршрута, поправки направлений (ПН), угла магнитного склонения γ, угла β уклона или подъема рельефа местности (УКЛ), который определяется угломером, и средняя длина lср шага ("Шаг"). Ввод значений осуществляется с помощью кнопок 9 набора данных и при соответствующих положениях переключателя "Режим", позволяющих вводить значения от 0 до 9 (10 кнопок) и знак "-" (одна кнопка) или обнулять введенные результаты кнопкой "0" при соответствующих положениях переключателя 10 "Режим". Причем при установке переключателя "Режим" в соответствующее положение с помощью кнопок 9 набора данных последовательно набираются числа, которые через шину данных и сигналов шины управления "Выбор ОЗУ" и "Запись в ОЗУ" записываются в отведенные для них ячейки памяти ОЗУ 3, а результаты набранных значений контролируются по индикатору 12.
При прохождении переключателя "Режим" соответственно в одном из положений производится вычисление текущего угла αi, угла направления на конечную αк или начальную αн точку маршрута, расстояния до конечной Rк или начальной Rн точки маршрута и отклонения Δαн или Δ αксоответственно при нахождении тумблера 20 Пр/Обр в положениях "Пр2 и "Обр".
Команда начала вычисления указанных параметров формируется кнопкой В (вычисление), которая нажимается после установления переключателя "Режим" в соответствующее положение.
Вычисление текущих координат Хi, Yi в движении производится в любом положении переключателя "Режим", а индикация этих значений производится соответственно при нахождении переключателя "Режим" в положениях Хн и Yни после нажатия кнопки В. Положения αi и Δ αi переключателя 10 "Режим" являются рабочими положениями прибора, в которых автоматически измеряется и индицируется на индикаторах 12 соответственно текущий угол направления движения αi на конечную или начальную точку маршрута или угол Δαк равный разности между направлением движения αi и углом направления αк на конечную точку маршрута Хк, Yк на угол Δαн равный разности между углом направления движения αi и углом направления αн на начальную точку маршрута Хн, Yн.
Схема 8 формирования кода режима работает следующим образом.
На один из входов Хн, Yн, Хк, Yк, УКЛ схемы в зависимости от положения переключателя 10 "Режим" подается положительный потенциал. Входы схемы соединены с входами элементов ИЛИ 1, 2, 3. 8 так, что при поступлении на соответствующий вход схемы 8 положительного потенциала на выходах элементов И 10 13 (первый выход схемы) будет формироваться код режима в соответствии с таблицей. Кроме того, в момент переключения переключателя 10 на всех входах схемы 8 действует "0" потенциал и на втором выходе схемы 8 (выход элемента ИЛИ 9) сформируется короткий положительный импульс. Таким образом, схема 8 формирует код режима, соответствующий положению переключателя 10 на первом выходе, и короткий импульс в момент переключения на втором выходе схемы 8. В зависимости от положения тумблера Пр-Обр на выходе схемы 8 формируются потенциалы в соответствии с таблицей, которые управляют работой устройства при движении от начальной точки маршрута к конечной (положение тумблера 15 "Пр") или при движении от любой точки маршрута к начальной точке (положение тумблера 15 "Обр").
При установке переключателя 10 "Режим" в новое положение или нажатии одной из кнопок 9 набора данных на входе RST вычислителя 1 со схемы ИЛИ 13 появится сигнал прерывания, который переведет вычислитель 1 на подпрограмму обработки прерывания. По этой подпрограмме вычислитель 1 через шину данных анализирует код, записанной в регистр "Режим" по сигналу с шины управления "Запись в регистр" и выводит на индикаторы 12 символ этого режима и соответствующую ему текущую или ранее введенную информацию. При нажатии на одной из кнопок 9 набора данных на входе RST вычислителя 1 со схемы ИЛИ 13 появится сигнал прерывания, который переведет вычислитель 1 на подпрограмму обработки прерывания. По этой подпрограмме выполнится анализ положения переключателя 10 "Режим", и, если он находится в одном из положений ввода информации, то по сигналу с шины управления "Запись в регистр" и "Выбор регистра" произойдет запись кода нажатой кнопки 9 набора данных в регистр 6 клавиатуры и через шину данных вычислитель 1 определит соответствие кода нажатой кнопки одному из чисел и выведет записанную информацию на индикатор 12.
При расчете Δα, Хi, Yi, αк, αн, Rк, Rн переключатель "Режим" устанавливается в соответствующее положение и нажимается кнопка В. Вычислитель 1 анализирует код с регистра 5 режима и код, соответствующий нажатию кнопки В (решение), и переходит соответственно на подпрограмму вычисления Δα, Хi, Yi, αк, αн, Rк, Rн. Все необходимые для расчета константы и текущие данные выбираются из соответствующих ячеек ОЗУ 3, которые отведены под их хранение и обновление по мере текущих расчетов.
При расчете Δ α, Хi, Yi, αк αн, Rк, Rн вычислитель 1 анализирует положение тумблера Пр/Обр по коду, считываемому из регистра режима, и в зависимости от его положения переходит на соответствующую подпрограмму расчета по формулам:
при нахождении тумблера Пр/Обр в положении Пр (движение в направлении от точки Хi, Yi к точке Хк, Yк):
Хiпр=Хi-1+Кш (β) ˙ lcp ˙ cos αoi ˙ cos β,
Yiпр=Yi-1+Kш (β) ˙ lcp ˙ sin αoi ˙ sin β,
αкi=γ+arccos Δαкi=αoi-αкi
Δαкi=αoi-αкi
Rкi=  при нахождении тумблера Пр/Обр в положении Обр (движение в направлении от точки Хi, Yi к точке Хн, Yн):
при нахождении тумблера Пр/Обр в положении Обр (движение в направлении от точки Хi, Yi к точке Хн, Yн):
Хiобр=Хi-1+Kш (β) ˙ lcp ˙ cos αoi ˙ cos β,
Yiобр=Yi-1+Kш(β) ˙ lcp ˙ sin αoi ˙ sin β,
αнi=γ+arccos Δαнi=αoi-αнi
Δαнi=αoi-αнi
Rнi=  где Кш(β ) функция изменения длины шага в зависимости от крутизны рельефа местности устанавливается эмпирически для каждого оператора;
где Кш(β ) функция изменения длины шага в зависимости от крутизны рельефа местности устанавливается эмпирически для каждого оператора;
Rкi, Rнi расстояние от текущей точки маршрута до конечной и начальной точек маршрута соответственно;
αкi αнi текущие углы направления движения на конечную и начальную точки маршрута соответственно;
Δ αкi Δ αнi углы, равные разности между направлением движения и направлением на конечную и начальную точки маршрута соответственно.
По окончании обработки подпрограммы прерываний по сигналам ТRAP или RST вычислитель 1 переходит на выполнение подпрограммы динамической индикации.
По сигналу TRAP, который имеет высший по сравнению с RST приоритет и поступающий после формирования информации о направлении движения αi с навигационного измерителя 14, вычислитель 1 переходит на подпрограмму вычисления текущих координат Хi, Yi по приведенным выше формулам.
Сигнал TRAP в навигационном измерителе 14 формируется следующим образом.
Датчиками первичной информации навигационного измерителя 14 является датчик 16 угловой ориентации, определяющий направление движения, и датчик 19 шага, регистрирующий перемещение на маршруте и формирующий электрический импульс при каждом шаге. Датчик 16 угловой ориентации фазометрического типа своими входами и выходами подключен к формирователю 15 многофазных сигналов, который формирует по цепям датчика 16 ортогональные напряжения (sin αi и cos αi), а также выходной импульсный сигнал, поступающий на преобразователь 17 фаза-код и несущий информацию о фазе (направлении движения по маршруту). Этот сигнал в преобразователе 17 фаза-код, выполненном по типовой схеме фазометра мгновенного действия, представляется в виде кода фазы в двоичном виде. Разрешением на процесс формирования кода фазы является сигнал заданной длительности с селектора-формирователя 18, начало которого совпадает с импульсом датчика 19 шага. После окончания формирования кода фазы в преобразователе 17 фаза-код на его выходе формируется сигнал TRAP. Таким образом, при каждом шаге в преобразователе 17 формируется код-фаза (угла направления движения αi) и сигнал TRAP, по которому вычислитель 1 переходит на подпрограмму расчета Хi и Yi. При этом двоичный код фазы в вычислителе 1 с помощью констант, хранимых в ОЗУ 3, преобразуется в значения sin и cos угла направления движения αi, который сигналами с шины управления "Запись в регистр" и "Выбор регистра угла" записывается в регистр 7 угла и отображается на индикаторах 12 в градусах.
Учитывая вышесказанное, работа с прибором на маршруте должна осуществляться следующим образом.
В начале маршрута оператор должен ввести в прибор координаты начальной и конечной точек Хн, Yн, Хк, Yк, угол магнитного склонения для данной местности γ и угол β наклона рельефа местности. С этой целью переключатель 10 "Режим" необходимо устанавливать последовательно в один из указанных режимов после включения питания прибора.
При этом на индикаторе 12 будет отображаться символ включенного режима. Кнопками 9 наборного поля набирают нужное значение параметра. Аналогично, устанавливая переключатель 10 "Режим" в соответствующие положения, вводят значения указанных выше параметров. Устанавливают переключатель 10 "Режим" в положение Δ α и, нажав кнопку 9 В набора данных, определяют угол направления на конечную (при нахождении тумблера Пр/Обр в положении "Пр") точку маршрута. Затем переключатель 12 "Режим" устанавливается в положение α или Δ α Поворачиваясь на месте, необходимо добиться на индикаторе12 значения α= αк или Δ α0, и начинать двигаться в этом направлении. При движении вычислитель 1 по сигналу TRAP с навигационного измерителя 14 будет рассчитывать текущие координаты Хi, Yi. Поэтому после каждого шага в любой точке маршрута на установке, устанавливая переключатель 10 "Режим" в соответствующие положения и нажимая кнопку 9 В набора данных, можно определить текущие координаты точки местонахождения на маршруте Хi, Yi, угол направления на конечную точку маршрута (в зависимости от положения тумблера Пр-Обр 20) и расстояние до этих точек.
На маршруте перед преодолением уклонов или подъемов рельефа местности необходимо остановиться, измерить угломером угол β В положении переключателя 10 "Режим" "УКЛ" с помощью кнопок 9 набора данных ввести значение угла β При дальнейшем движении угол будет учитываться при расчете координат Хi, Yi, что позволит учитывать изменение средней длины шага (увеличение его при преодолении спусков и уменьшение при преодолении подъемов) и повысит точность измерения пройденного пути.
Направление движения на маршруте удобно контролировать по индикатору 12 прибора при нахождении переключателя 10 "Режим" в положении Δ α так как в этом случае не нужно производить никаких вычислений. При этом оператору необходимо двигаться по маршруту так, чтобы на индикаторе 12 индицировались нулевые значения угла. При отклонении на маршруте влево от заданного направления на индикаторе 12 будут высвечиваться положительные значения угла, а при отклонении вправо отрицательные значения. Это позволяет оператору легко определять правильное направление движения. При необходимости возвращения в исходную точку маршрута Хн, Yн из конечной Хк, Yк или любой текущей точки маршрута не требуется вводить никаких дополнительных данных, а необходимо установить тумблер Пр-Обр 20 в положение "Обр" и, поворачиваясь на месте, добиться в положении Δ α переключателя 10, "Режим" нулевых значений угла на индикаторе 12 и начинать движение к исходной точке.
Предлагаемый прибор легко реализуется на серийно выпускаемых радиокомпонентах. В качестве вычислителя использован восьмиразрядный микропроцессорный комплект серии М1821ВМ85А, структурная схема. В качестве ОЗУ и ПЗУ использованы микросхемы 537РУ9А и 536РТА7, а в качестве регистров режима, индикации, клавиатуры и угла микросхемы 564ИР6. В качестве схемы управления использованы микросхемы 564ЛС2 и 564ЛП10, а в качестве индикаторов индикатор цифровой ЭЛС339А. Кнопки набора данных выполнены на микропереключателях МП7, переключатель "Режим" на переключателе типа ПГ2-5-12П1НВК, схема формирования кода режима на элементах 564ЛУ10, 564ЛЕ5, 564ЛА7 и 564ЛЕ6, селектор-формирователь на микросхеме 564АН1, преобразователь фаза-код на микросхемах 564ИУ15, 564ИЕ10, 564ТМ2, 564ЛА7, формирователь многофазных сигналов на микросхемах 140УД12, датчик шага выполнен аналогично описанному датчику. Он содержит корпус, в котором консольно установлена плоская пружина, на которой закреплены ферромагнитная пластина и на конце ее постоянный магнит, взаимодействующий с герконом, ограничители перемещений подвижной массы. Контактный узел датчика шага содержит магнит и геркон. В исходном состоянии магнит с подвижной пружиной находится в верхнем положении и контакты геркона разомкнуты. Вертикальное ускорение при каждом шаге увеличивает силу тяжести до тех пор, пока магнит с плоской пружиной скачком переместится в нижнее положение и замкнет контакт геркона, включенный в электронную схему, которая формирует импульс. По окончании действия силы ускорения сила тяжести уменьшается, магнит с плоской пружиной возвращается в верхнее положение и процесс при дальнейшем движении повторяется. Таким образом, при каждом шаге формируется импульс. Для устранения дребезга контактов геркона сигнал с геркона подается на селектор-формирователь, формирующий импульс стандартной длительности.
Датчик угловой ориентации аналогичен датчику прибора-прототипа. Он содержит корпус, на котором закреплены четыре трансформатора, расположенные через 90о относительно точки опоры ротора, катушку, состоящую из ротора, шкалы, магнита, и собранную на латунной втулке с завальцованным в ней агатом, печатную плату, к которой крепятся выводы трансформаторов. Принципиально он представляет собой компасное устройство, содержащее магнитный элемент типа "картушка", определяющий направление на Север, и электронные элементы преобразования значений измеряемых углов в электрические сигналы.
Практическое использование предлагаемого прибора по сравнению с прибором-прототипом позволяет при движении в прямом направлении (тумблер Пр-Обр в положении "Пр") при установке переключателя "Режим" в положение Δ α автоматически вычислять и индицировать на цифровых индикаторах в любой точке маршрута угол Δ αкi, равный разности между направлением движения и направлением на конечную точку маршрута; в любой точке маршрута при установке тумблера Пр-Обр в положение "Обр" обеспечивать возможность без обновления исходных данных движения в направлении к начальной точке маршрута (определять направление на начальную точку и расстояние до нее); в положениях переключателя "Режим "ПН" и "УКЛ" с помощью кнопок набора данных вводить угол магнитного склонения и угол наклона или подъема рельефа местности.
Указанные преимущества позволяют точнее и быстрее выйти в заданную точку маршрута за счет повышения точности измерения пути и автоматизации определения направления на эту точку.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| СИСТЕМА ВНУТРИКОРАБЕЛЬНОЙ ГРОМКОГОВОРЯЩЕЙ СВЯЗИ И ТРАНСЛЯЦИИ | 1996 |
|
RU2131168C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 1996 |
|
RU2137153C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ПАМЯТИ ОПЕРАТОРА | 1991 |
|
RU2020606C1 |
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ТАКТОВОГО КОЛЕБАНИЯ | 1991 |
|
RU2007881C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПОЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ "БАГИС-С" | 1995 |
|
RU2108613C1 |
| УСТРОЙСТВО ДЛЯ ПРОФЕССИОНАЛЬНОГО ОТБОРА ОПЕРАТОРОВ | 1991 |
|
RU2020604C1 |
| Аппаратура наземной навигации | 2024 |
|
RU2840479C1 |
Использование: изобретение относится к приборостроению и может быть использовано как автономный навигационный прибор. Сущность изобретения: с целью автоматизации вычисления угла отклонения от заданного направления движения в него введены вычислительные и функциональные блоки определения и индикации координат контролируемого объекта. 1 з.п. ф-лы, 2 ил.
Xiпр=Xi-1+Kш(β)·lср·cosαoi·cosβ,
Yiпр=Yi-1+Kш(β)lср·sinαoi·sinβ,
Xio=Xi-1+Kш(β)·lср·cosαoi·cosβ,
Yiобр=Yi-1+Kш(β)·lср·sinαoi·sinβ,
Δαкi=αoi-αкi,
Δαнi=αoi-αн,
где Xн, Yн, Xi, Yi, Xк, Yк координаты начальной, текущей и конечной точек маршрута;
αoi угол направления движения;
αнi, αкi текущие углы направления движения на начальную и конечную точки маршрута;
Δαнi, Δαкi углы, равные разности между направлением движения и направлением на начальную и конечную точки маршрута соответственно;
Rнi, Rкi расстояние от текущей точки до начальной и конечной точек маршрута соответственно;
lср средняя длина шага оператора;
γ магнитное склонение;
b угол наклона (подъема рельефа местности предполагаемого участка маршрута);
Kш(β) функция изменения длины шага оператора от крутизны рельефа местности.
| Шагомер | 1986 |
|
SU1422009A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
