Изобретение относится к устройствам для определения пути, пройденного оператором в заданном направлении с применением радиоэлектронных устройств, и может быть использовано в спорте, туризме и других областях.
Известно устройство, содержащее датчик шага, формирователь импульсов датчика шага, генератор импульсов, элемент И, двоичный умножитель, двоичный и десятичный счетчики, блок ввода масштабного коэффициента и цифровой индикатор.
Известное устройство позволяет измерять пройденный путь, но не позволяет определять направление движения, а следовательно, местоположение пользователя, что является недостатком этого устройства.
Известен цифровой компас, содержащий двухосевой магнитоэлектрический датчик и процессор для определения пеленгов, вычисляющий пеленг для местной индикации. Процессор содержит аналого-цифровой преобразователь для измерения соотношения сигналов, соответствующих осям X и Y (меньшее делится на большее), поступающих с датчика, программируемый блок памяти, управляемый сигналами с выходных линий аналого-цифрового преобразователя, который содержит функцию арктангенсов углов от 0 до 90o. Выходные линии данных блока памяти определяют угол смещения сектора в диапазоне от 0 до 90o, который впоследствии прибавляется к главному румбу, образующему в пеленге нижнюю границу выходного пеленга. Следовательно, данный цифровой компас позволяет определять направление движения. Однако он не осуществляет определение пройденного пути, что является его недостатком.
Известен автономный навигационный прибор АНП-2К, содержащий переключатель "Режим", кнопки набора данных, коммутатор-формирователь данных, регистры памяти, координат конечной точки маршрута и средней длины шага, вычислитель координат объекта, блок ввода данных и управления, вычислитель, ПЗУ, схему управления индикацией, индикаторы и навигационный измеритель, в который входит датчик угловой ориентации, формирователь многофазных сигналов, преобразователь фаза-код, датчик шага и селектор-формирователь. Прибор позволяет определять на остановках текущие координаты Xi, Yi оператора, направление движение αoi, дирекционный угол на конечную точку маршрута αki в расстояние до нее Rki, что позволяет оператору ориентироваться на местности при движении по маршруту.
Однако прибор имеет сравнительно большой вес и габариты, не позволяет автоматически определять отклонение Δαi направления от направления на конечную точку маршрута, механический ввод магнитного склонения, что усложнило конструкцию компаса. Это является недостатками этого прибора и снижает эффективность его использования.
Из известных устройств наиболее близким по технической сущности к изобретению является автономный навигационный прибор АНП-3КМ, выбранный за прототип. Он содержит схему управления режимами работы с кнопками набора данных, вычислитель, ОЗУ, ПЗУ, регистры индикации, режима, клавиатуры и угла, схему управления индикацией, цифровые индикаторы, схему ИЛИ, навигационный измеритель, состоящий из датчика угловой ориентации, формирователя аналоговых сигналов, преобразователя напряжения ±5 B, датчика шага, селектора-формирователя и преобразователя фаза-код. Прибор-прототип позволяет осуществлять движение по маршруту, определять на остановках текущие координаты Xi, Yi оператора, направление его движения, направление на конечную точку маршрута αki и расстояние до этой точки, вводить магнитное склонение γ, автоматически определяет отклонение направления движения от направления на конечную точку.
Однако устройство-прототип обладает рядом недостатков.
1) Большое количество органов управления на панели прибора 12 кнопок наборного поля, которые используют лишь при вводе информации, кнопка "Решение", переключатель "Режим", два тумблера "Питание" и ПР/обр. Кроме того, на панели прибора размещен магнитный компас. Размещение этих органов на панеле определяет ее сравнительный большие габариты, (85х200 мм), а большие количество органов управления затрудняет работу с прибором.
2) Формирователь многофазных сигналов прибора питается от двухполярного (±5 B) источника, в качестве которого используется преобразователь постоянного напряжения батареи в двухполярное напряжение. Питание формирователя и преобразователя осуществляется постоянно во время работы прибора, в то время как угол измеряется в течение нескольких МС. Это приводит к увеличению энергопотребления (15 18 мА) и использованию энергоемких источников тока, что также приводит к увеличению габаритов и массы прибора (85х168х200 мм, 2,6 кг).
3) Невозможность запомнить контрольные точки маршрута для восстановления последнего по карте после возвращения с маршрута и осуществлять пеленгование объекта, находящегося на удаление оператора.
Указанные недостатки устройства-прототипа снижают эффективность его использования и проводят к определенным неудобствам в эксплуатации.
Техническая задача изобретения заключается в обеспечении определения координат пеленгуемого объекта, записи и считывания контрольных точек маршрута и в существенном улучшении массогабаритных характеристик прибора за счет сокращения органов управления и снижения энергопотребления.
Указанная техническая задача решается так, что в автономный навигационный прибор, содержащий ОЗУ, ПЗУ, регистр угла, последовательно соединенные регистр индикации, схему управления индикацией и цифровой индикатор, навигационный измеритель, состоящий из последовательно соединенных датчика шага и селектора формирователя, а также преобразователя фаза-код и формирователя аналоговых сигналов, первые вход и выход которого соединены соответственно с первым выходом и входом преобразователя фаза-код, второй выход которого соединен с первым входом регистра угла, при этом шина адреса вычислителя соединена с первыми входами ОЗУ и ПЗУ, шина данных вычислителя соединена с выходом ПЗУ, выходом ОЗУ, первым входом регистра индикации и выходом регистра угла, шина управления вычислителя соединена с входами "Запись" и "Выбор" ОЗУ, датчик угловой ориентации, вход и выход которого соединены соответственно с вторым выходом и входом формирователя аналоговых сигналов, дополнительно введены схемы выбора режима и ввода данных и введенный в навигационный измеритель электронный ключ.
При этом шина данных вычислителя соединена с вторым входом ОЗУ и первым выходом схемы выбора режима и ввода данных, первый вход которой соединен с входом V "0"- вычислителя, а второй, третий и четвертый ее входы с шиной управления вычислителя, которая соединена со вторым входом преобразователя фаза-код, входами "Запись" регистров угла индикации, входом "Чтение" ОЗУ, входами "Выбор" и "Чтение" ПЗУ, входом электронного ключа, выход которого соединен с третьим входом формирователя аналоговых сигналов, третий и четвертый входы преобразователя фаза-код соединены соответственно с вторым выходом схемы выбора режима работы и ввода данных и выходом селектора формирователя, третий, четвертый и пятый выходы преобразователя фаза-код соединены соответственно с входами fт и TRAP вычислителя и пятым входом схемы выбора режима и ввода данных, третий выход которой соединен со входом RST вычислителя, который выполнен в виде, реализующим зависимости: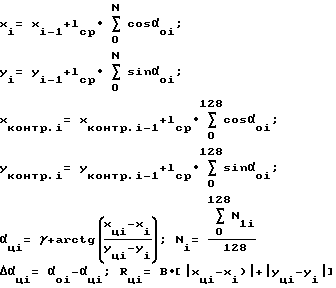
где Xi, Yi, Xконтр.i, Yконтр.i текущие координаты оператора и контрольных точек маршрута;
αoi угол направления движения;
Xцi, Yцi координаты цели;
αцi угол направления на цель;
Δαцi, угол, равный разности между углом направления на цель;
N количество шагов от 0 до 128;
Rцi расстояние от текущей точки до цели;
γ магнитнео склонение;
Ni номер контрольной точки;
N1i количество шагов оператора;
N2 интервал между контрольными точками через 128 (2; 5; 6; 512.) шагов, м;
N3 количество контрольных точек,
L длина маршрута, м;
Схема выбора режима работы и ввода данных содержит четыре кнопки, счетверенный асинхронный K-триггер с тремя состояниями, двоично-десятичный дешифратор, элемент исключающее ИЛИ, четырехразрядный двоичный счетчик и два двухступенчатых D-триггера, при этом выхода 4 и 5 дешифратора соответственно соединены с входами S и D-триггера, R-вход и Q выход которого являются соответственно первым входом и вторым выходом схемы, нормально разомкнутые и нормально замкнутые контакты кнопок 7, 8, 9 и 10 соответственно соединены между собой и подключены к плюсу и минусу источника питания, общие контакты этих кнопок к входам 10, 13, 12 и 11 дешифратора, третий вход которого через элемент ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к R-входу счетчика и S1, S2, S3, S4-входам асинхронного R-триггера, 01, 02, 03 и 0,4 выходы которого подсоединены к шине, являющейся первым выходом схемы, R-входы этого триггера, соединенные между собой, и вход E соответственно являются третьим и вторым входоми схемы, выход 6 счетчика объединен и соединен с входом C второго D-триггера, R-вход и Q-выход которого соответственно являются четвертым входом и третьим выходом схемы, CE-выход этого счетчика является пятым входом схемы.
Сравнительный анализ с прототипом показывает, что заявляемый прибор отличается наличием электронного ключа и схемы выбора режима работы и ввода данных с соответствующими связями. Таким образом, изобретение соответствует критерию "Новизна".
Анализ известных технических решений (аналогов) в исследуемой и смежных областях позволяет сделать вывод, что введенные функциональные узлы известны. Однако введение их в автономный навигационный прибор с указанными связями придают прибору новые свойства; количество органов управления с 16 у прототипа уменьшено до 4, что упростило работу с прибором и позволило существенно уменьшить его габариты. Введение электронного ключа позволило существенно уменьшить энергопотребление прибора и использовать в приборе источники питания с меньшей энергоемкостью и меньшими габаритами.
Изобретение имеет изобретательский уровень, так как оно для специалиста явным образом не следует из уровня техники.
Изобретение является промышленно применимым, так как оно может быть использовано в различных областях народного хозяйства.
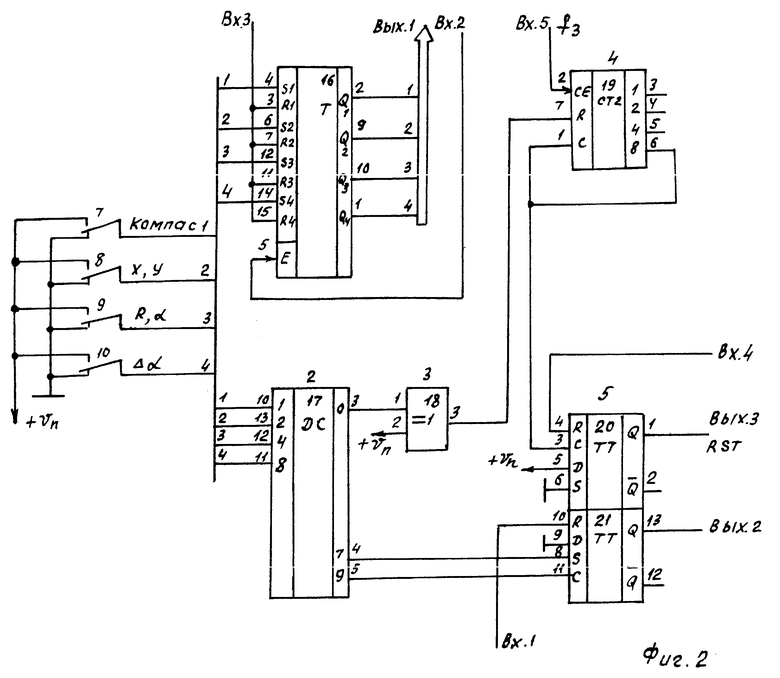
На фиг.1 приведена функциональная схема предлагаемого прибора; на фиг. 2 схема выбора режима и ввода данных; на фиг. 3 режимы работы прибора и назначение его строк меню; на фиг. 4 цифровой индикатор; на фиг. 5 и 6- примеры исполнения отдельных функциональных узлов прибора.
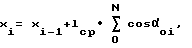
В прибор (фиг. 1) входят вычислитель 1, ПЗУ2, ОЗУ3, регистры индикации 4, угла 5, схема выбора режима 6, цифровые индикаторы 7, схема управления индикацией 8, навигационный измеритель 9, электронный ключ 10, формирователь аналоговых сигналов 11, формирователь фаза-код 12, датчик угловой ориентации 13, селектор-формирователь 14 и датчик шага 15.
Вычислитель 1 шиной управления соединен с входом "Чтение" и "Выбор" ПЗУ2, "Чтение", "Запись" и "Выбор ОЗУ 3, с входами "Запись" и "Выбор" регистра индикации 4 и регистра угла 5, с входами 2, 3 и 4 схемы выбора режима и ввода данных 6, а шиной данных с выходом ПЗУ3, входом и выходом ОЗУ3, с входом регистра индикации 4, с выходами регистра угла 5 и схемы выбора режима и ввода данных 6.
Шина адреса вычислителя 1 соединена с входами ПЗУ и ОЗУ. Выход регистра индикации 4 через схему управления индикации 8 подключен к индикаторам 7. Вход y "0"- вычислителя 1 соединен с первым входом схемы формирования режима и ввода данных 6, выходы 2 и 3 которой соответственно соединены с третьим входом формирователя фаза-код 12 и с входом RST-вычислителя, а вход 5 с четвертым выходом этого формирователя 12. Вход электронного ключа 10 соединен с шиной управления вычислителя 1, а выход с первым входом формирователя. Датчик угловой ориентации 13 своими входом и выходом подключен к первым входу и выходу формирователя 11, вторые вход и выход которого подключены к первым входу и выходу формирователя 12. Датчик шага 15 через селектор-формирователь 14 подключен к второму входу формирователя 12, первый, второй и третий выходы которого соответственно соединены с входами TRAP и fт вычислителя 1 и с третьим входом регистра угла 5.
Схема выбора режима работы и ввода данных (фиг. 2) содержит асинхронный RS-триггер 16, дешифратор 17, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 18, счетчик 19, двухступенчатый D-триггер 20 и 21, кнопки 7, 8, 9 и 10. Нормально разомкнутые и нормально замкнутые контакты кнопок 7, 8, 9 и 10 соответственно соединены между собой и подключены к плюсу и минусу источника питания. Общие контакты этих кнопок соединены соответственно с входами S1, S2, S3, S4 триггера 16, входы R1, R2, R3, R4 которого соединены между собой и являются входом 2 схемы, и с входами 10, 13, 12, 11 дешифратора 2. Пятый вход триггера16 является входом 2 схемы, а выходы 2, 9, 10 и 1 этого триггера 1 являются Вых.1 схемы. Третий выход дешифратора 17 через ИСКЛЮЧАЮЩЕЕ ИЛИ 18 соединены с входом R счетчика 19, CE-вход которого является Вх.5 схемы. Вход 1 и Вых. 6 счетчика 19 соединены и подключены к входу C-триггера 20, вход R и выход Q которого являются соответственно Вх.4 и Вых.2 схемы. Выходы 4 и 5 дешифратора 17 соответственно соединены с входами S-и C триггера 21, вход R и выход Q которого являются Вх.1 и Вых.3 схемы.
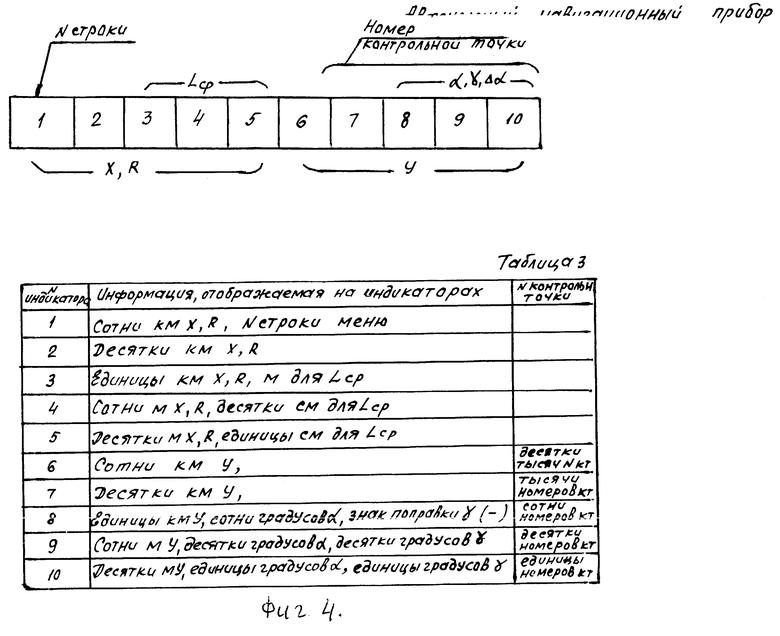
На фиг.5 приведен цифровой индикатор, содержащий 10 индикаторов. Информация, отображаемая на этих индикаторах, и ее размерность указаны в табл. 3 фиг. 5.
Прибор работает следующим образом.
Включение питания прибора осуществляется путем подсоединения к прибору блока питания (тумблера включения питания у прибора нет, что связано с защитой режима записи и запоминания контрольных точек маршрута). В момент включения питания вычислитель 1 и схема 6 обнуляются импульсом с RC-цепочки, а на вход fт начнет поступать тактовая частота с навигационного измерителя. При этом программа работы прибора и константы из ПЗУ2 побайтно через шину данных по сигналам с шины управления "Выбор ПЗУ" и "Чтение ПЗУ" запоминаются в вычислителе 1, а затем по сигналам с шины управления "Выбор ПЗУ " и "Запись в ПЗУ" через шину данных переписываются в ОЗУ 3. По шине адреса вычислитель 1 формирует адрес ячейки памяти ПЗУ 2, из которой информации считывается, в адрес ячейки записи в ОЗУ 3. После перезаписи ПЗУ 2 отключается и при работе прибора вычислитель 1 будет обращаться только к ОЗУ 3. Перезапись информации из ПЗУ 2 осуществляется каждый раз при включении питания прибора примерно в течение 3 с и производится с целью снижения энергопотребления, так как существующие ПЗУ энергоемки. После перезаписи вычислитель переходит в режим ожидания "HALT", а ПЗУ2 отключается.
Потребление прибора в режимах: Включено 5 мА, Отключено 2 мА.
Такое потребление прибора достигнуто за счет исключения преобразователя напряжения и перевода формирователя аналоговых сигналов на однополярное питание, а также за счет кратковременного включения этого формирователя на время измерения угла (≈20 мС).
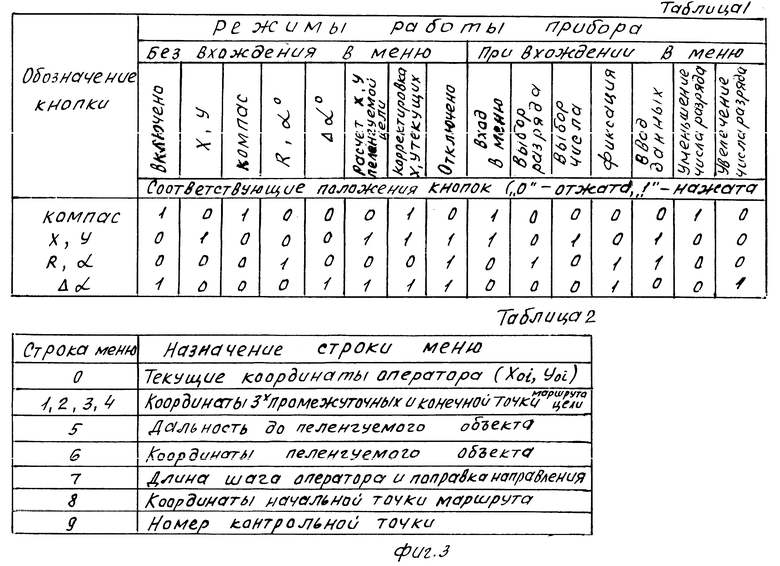
Управление работой прибора осуществляется с помощью схемы 6 четырьмя кнопками "Δα", "R, a ", "X, Y" и "КОМПАС", которые размещены на передней панеле прибора. На этой панеле также размещен индикатор 7 из 10 цифровых индикаторов. Назначение индикаторов и их расположение приведено на фиг. 5.
Режимы работы прибора приведены в табл. 1 фиг. 4, а назначение строк меню в табл. 2. Как следует из табл. 2, режимы работы прибора разбиты на две группы: работа без вхождения в меню и работа при вхождении в меню. Режимами работы первой группы пользуются на маршруте. Они связаны с включением и отключением прибора (остается включенной ОЗУ), определение текущих координат "Xi, Yi, дирекционного угла "КОМПАС", расстояния до цели R и направления на цель aцi и отклонения направления движения на цель от направления движения " Δα ". Режимы торой группы связаны с вхождением в меню, выбором строки, фиксацией строки, набором данных путем выбора разряда, набора числа в этом разряде кнопками увеличение и уменьшение, выбора следующего разряда и числа в этом разряде и т. д. вводом данных. Вхождение в режим меню осуществляется путем нажатия и отпускания кнопок, указанных в табл. 1 фиг. 4.
Схема выбора режима работы и ввода данных 6 работает следующим образом.
При включении прибора во время перезаписи триггер 20 по Вх.4 обнуляется, а счетчик 19, на который поступает частота fз досчитывает до появления на выходе 6 лог.1 и блокируется. Триггер 20 по входу C не устанавливается в "1" не формирует сигнал RST в связи с тем, что на его входе R во время перезаписи подается запрещающий потенциал "1". При нажатии и отпускании одной из кнопок или их комбинации в соответствии с табл. 2 фиг. 2 (кроме режимом "Включено" и "Отключено") код комбинации (кнопка "Компас" старший разряд, кнопка " Da " младший разряды) поступит на время нажатия кнопки на входы S1, S2, S3, S4 триггера 16 и входы 10, 13, 12, 11 дешифратора 17 и исчезает при отпускании. Эта комбинация запомнится триггером 16, а на выход 3 дешифратора 17 сигнал с логической "1" сменится на "0" и опять вернется в "1". "0" потенциал с выхода 3 дешифратора 17 через ИСКЛЮЧАЮЩЕЕ ИЛИ 18 обнулит к входу R счетчик 19 и включит его в режим счета. При появлении "1" на выходе 6 счетчика 19 он заблокируется по входу C, а триггер 20 по входу C установится в "1" и которая поступит на вход RST вычислителя 1, включая его на подпрограмму обработки прерывания. При этой подпрограмме вычислитель считывает с триггера 16 по входу 5 информацию на шину данных, анализирует и запомимает код на выходах Q1, Q2, Q3 и Q4 и переходит на работу по программе соответствующего коду режима (табл. 1 фиг. 4), а также обнуляет по Вх.3 триггер 16 и по Вх.4 триггер 20.
При наборе кнопками режима "Отключено" (код 7) на выходе 4 дешифратора 17 сформируется "1", которая установит триггер 21 в "1", которая поступит на формирователь фаза-код 12 и заблокирует работу генератора формирователя 12 и вычислителя 1.
При наборе кнопками режима "Включено" (код 9) на входе 5 дешифратора 17 сформируется"1", которая по входу C установит триггер 21 в "0" и разрешит работу генератора формирователя и вычислителя 1.
В режим меню прибор входит после одновременного нажатия и отпускания кнопок "Компас" и "X, Y". После этого назначение кнопок при нажатии изменяется в соответствии с табл. 1 фиг. 4: кнопка "Компас" уменьшение числа/разряда, кнопка "X, Y" выбор числа, кнопка "R, a" выбор разряда, кнопка "Da" увеличение числа/разряда.
При вхождении в меню на первом индикаторе фиг. 5 высвечивается цифра "0" строка текущие координаты оператора. Для ввода текущих координат начальной точки движения необходимо нажать и отпустить кнопки "R, a" и "Da" (фиксация). На всех индикаторах засветится цифра "0". Нажать и отпустить кнопку "X, Y" (выбор числа). Кнопками больше (Da) или меньше (Компас) набрать необходимое число на первом индикаторе. Нажать и отпустить кнопку "R, a" (выбор разряда). Кнопкой меньше (Компас) перевести точку на точку на второй индикатор фиг.5. Нажать и отпустить кнопку выбор числа (X, Y). Кнопками меньше (Компас) или больше (Da) набрать необходимое число на втором индикаторе. Аналогично набрать информацию о текущих координатах на всех других индикаторах. Нажать кнопки "X, Y" и "R, a", произвести после погасания индикации путем вхождения в меню и нажатия кнопок "Фиксация". На всех индикаторах высветится введенная информация. В случае обнаружения ошибок при вводе информация или корректировки, описанными выше приемами выбора разряда, выбора числа и набора числа кнопками "<" и ">" установить требуемые значения.
Для ввода координат первой контрольной точки необходимо войти в меню путем нажатия кнопок "Компас" и "X, Y". На первом индикаторе засветится цифра "0". Нажать и отпустить кнопку "X, Y" (выбор числа) и кнопкой "Da" (увеличение числа) набрать на первом индикаторе цифру "1" (первая строка). Описанным выше способом ввести координаты первой контрольной точки.
Описанными выше приемами, набирая вторую, третью и четвертую строки, ввести координаты второй, третьей и четвертой контрольных точек (целей). Набрать седьмую строку меню и ввести среднюю длину шага lср и поправку направления g в соответствии с табл. 3 фиг. 4.
После проведенных выше операций прибор готов к работе на маршруте движения. В том случае, когда в прибор в "0" строку меню введены координаты начальной точки, в которую оператор будет доставлен каким-либо транспортом, прибор отключается нажатием и отпусканием кнопок "X, Y", "R, a" и "Da". При прибытии в заданную начальную точку оператор включает прибор нажатием кнопок "Компас" и "Da" может начинать движение по маршруту.
В приборе прототипе текущее значение координат вычисляется по формулам Xi=Xi-1+lср•cosαoi, Yi=Yi-1+lср• sinαoi и далее суммируется или вычитается в зависимости от направления движения вычислителем 1 с ранее вычисленными значениями.
В предлагаемом приборе с целью сокращения времени работы вычислителя 1 производится накопление текущих координат в виде суммы sinαoi и cosαoi в буферных регистрах памяти вычислителя 1. sinαoi и cosαoi вычисляются по углу, считываемому с регистра угла 5 программно по сигналу TRAP.
Сигнал TRAP формируется следующим образом.
Датчиками первичной информации навигационного измерителя 9 являются датчик угловой ориентации 13, определяющий направление движения и датчик шага 15, регистрирующий перемещение на маршруте и формирующий эклектрический импульс при каждом шаге. Датчик угловой ориентации 13 фазометрического типа своими входами и выходами подключен к формирователю аналогов сигналов 11, который формирует по цепям датчика 13 ортогональные напряжения sinα и cosα, а также импульсный выходной сигнал, поступающий на преобразователь фаза-код 12 и несущий информацию о фазе (направления движения по маршруту). Этот сигнал в преобразователе фаза-код 12, выполненном по типовой схеме фазометра мгновенного действия, представляется в виде кода фазы в двоичном виде. Разрешением на формирование кода фазы является сигнал заданной длительности с селектора-формирователя 14, начало которого совпадает с импульсом датчика шага 15. После окончания формирования кода фазы в преобразователе фаза-код 12 на его выходе формируется сигнал TRAP. Таким образом, при каждом шаге в преобразователе фаза-код 12 формируется код фазы (угла направления движения aoi) и сигнал TRAP, по которому двоичный код фазы в вычислителе 1 с помощью констант, хранимых в ОЗУ 3, преобразуется в значения sinαoi и cosαoi угла направления движения αoi и суммируются в буферных регистрах памяти вычислителя 1, а угол αoi записывается сигналами "Запись в регистр" "Выбор регистра" в регистр угла 5 и при нажатии кнопки "Кнопки" отображается на индикаторах 7 в градусах.
При заполнении одного или двух буферных регистров в зависимости от направления движения, которое происходит при прохождении определенного количества шагов по сигналу "TRAP" (в данном приборе, например через 128 шагов), сумма sinαoi и cosαoi умножается на среднюю длину шага и суммируется с ранее записанными координатами по формулам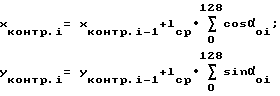
Номер точки Ni вычисляется по формуле
где N1i количество шагов оператора.
Количество контрольных точек N3 определяется по формуле ,
,
где N2 интервал между контрольными точками, например, через 128 шагов, м;
L длина маршрута, м.
Таким образом, через каждые 128 шагов в приборе в ОЗУ3 записываются координаты точек, которые являются контрольными точками маршрута.
При расчете Xi, Yi, αцi, Rцi и Δαцi после нажатия и отпускания соответствующей кнопки по сигналу RT с выхода 3 платы 6 вычислитель 1 анализирует код, набранный кнопками, опрашивая выходы триггера 16, и в зависимости от кода переходит на соответствующую подпрограмму расчета по формулам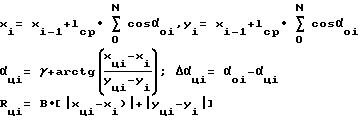
где Xi, Yi текущие координаты оператора;
αoi угол направления движения;
N количество шагов, например, от 0 до 128 (256, 512.);
αцi угол направления на цель;
Δαцi угол, равный разности между направлением движения и направлением на цель;
Rцi расстояние от текущей точки до i-цели;
γ магнитное склонение; .
.
После выполнения соответствующей подпрограммы вычислений вычислитель 1 переходит на подпрограмму динамической индикации рассчитанных параметров, длительность которой равна 4 6 с. Повторное включение кнопки включает индикацию еще на 4 6 с.
Учитывая выше сказанное, работа с прибором на маршрутное должна осуществляться следующим образом.
В начальной точке маршрута вводятся в соответствии с табл. 2 фиг. 4 координаты начальной точки Xн, Yн в "0" строку меню (в случае необходимости возвращения в начальную точку маршрута координаты Xн, Yн вводятся также в строку 8 меню), координаты конечной точки Xк, Yк (в случае необходимости вводятся три промежуточных точки) в соответствующие 1, 2, 3 и 4 строки меню, среднюю длину шага lср и магнитное склонение γ в седьмую строку. В зависимости от выбранной точки прибытия выбирается строка, где записаны координаты этой точки, и нажимаются кнопки "R, a" и "Da" "фиксация". На индикаторах 7 высвечиваются координаты выбранной точки Xк1, Yк1. Нажать кнопку "R, a" и сосчитать с индикаторов расстояние до точки Rк1 и направление aк1 на нее. Нажать кнопку "Компас" или "Δα" и, поворачиваясь на месте, добейтесь на индикаторах 7 значения aк1= α или Δα 0. В этом направлении необходимо начать движение по маршруту. В процессе движения вычислитель 1 будет по сигналу TRAP с навигационного измерителя 12 рассчитывать текущие координаты местоположения оператора при нажатии кнопки "X, Y" либо координаты контрольных точек при ненажатой кнопки"X, Y". Нажимая кнопку "R, a" можно определять направление aк1 или αн и определять расстояние Rк1 или Rн.
Направление движения на маршруте удобно контролировать по индикатору 7, нажимая кнопку "Δα", так как при этом не надо производить никаких вычислений. Необходимо двигаться по маршруту так, чтобы на индикаторах 7 высвечивалось нулевое значение угла. При отклонении на маршруте влево от заданного направления на индикаторе высвечиваются положительные значения угла, а при отклонении вправо отрицательные значения, что позволяет быстро определять правильное направление движения.
В ряде случаев на маршруте необходимо определять координаты объекта, к которому трудно или невозможно подойти. Это осуществляется следующим образом.
Войти в меню, набрать строку 5 и нажать кнопки "R, a" и "Da" - "фиксация". На индикаторах засветятся "0". Описанными выше приемами набрать на индикаторах значение дальности до пеленгуемого объекта, которое может определяться с помощью бинокля, дальномера, глазомерно и т.д. Направить прибор с помощью прицельного устройства, установленного определенным образом на панели прибора, на пеленгуемый объект. Кнопками "X, Y" и "Da" осуществить ввод, записанные координаты будут храниться в приборе до тех пор, пока не будет запеленгован второй объект или будет выключен прибор.
Считывание координат запеленгованного объекта с индикаторов 7 осуществляется путем вхождения в меню, выбора строки 6 и ее "фиксации".
При достижении первой промежуточной точки маршрута для продвижения к следующей промежуточной точке необходимо войти в меню, набрать строку, где находится следующая точка маршрута, и зафиксировать ее. Координаты этой точки перепишутся в ОЗУ и прибор будет вести к второй точке. Поэтому, как было описано выше, необходимо определить Rк2 и aк2 и, поворачиваясь на месте, добиться значений αк2= α или Δα 0 и продолжать движение в этом направлении на вторую точку. Аналогичные действия произвести при достижении второй и третьей точек маршрута.
При достижении конечной точки маршрута или на отдыхе прибор необходимо отключить нажатием и отпусканием кнопок "X, Y", "R, a" и "Da". Если требуется осуществить контроль пройденного маршрута, то необходимо записать пройденные контрольные точки через сто двадцать восемь шагов. Для этого нужно установить прибор так, чтобы он не начался и было удобно с ним работать.
Включать прибор кнопками "Компас" и "Da" и войти в меню, набрать строку 9 и зафиксировать ее. На первом разряде останется цифра 9, на остальных засветится цифра "0". Как было описано выше, в соответствии таблицей 1 фиг. 4, манипулируя кнопкой "Разряд", "Цифра", "<" и ">" на индикаторах 6, 7.10, набирать номер контрольной точки. Номер контрольной точки можно набирать по порядку1, 2, 3. либо дискретно, например, 1, 10, 20, 100, 110, 120, и т.д. Нажать кнопки "X, Y" и "R, a" ввод данных. На индикаторах 1.5 и 610 высветятся координаты набранной контрольной точки. Аналогично, просматривая и записывая координаты других контрольных точек, можно с помощью карты восстановить маршрут движения оператора и проконтролировать маршрут его движения.
При необходимости возвращения в начальную точку маршрута из любой его другой точки необходимо войти в меню, набрать строку 8 и нажать фиксацию, затем кнопку "R,a", сориентироваться так, чтобы Da 0 и начать движение.
Предлагаемый прибор легко реализуется на серийно выпускаемых радиокомпанентах.
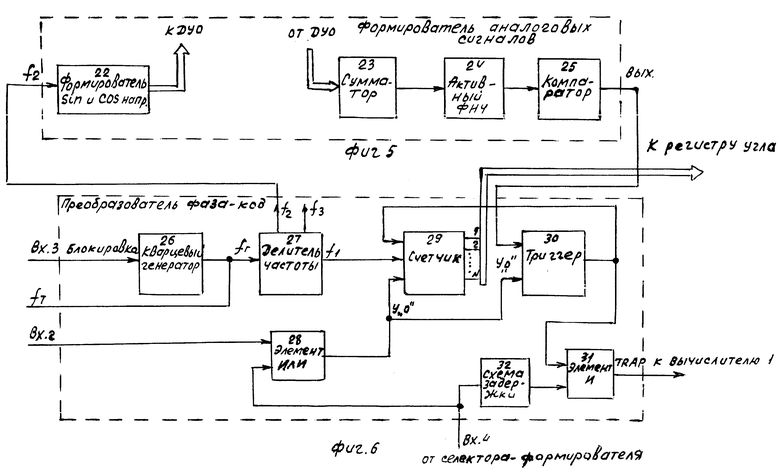
На фиг. 5 показан вариант исполнения формирователя аналоговых сигналов. Формирователь Sin и Cos напряжений 22 формирует напряжения для питания токовых входов преобразователей Холла датчика угловой ориентации (ДУО) (преобразователи тип ПХЭ 602 117А). Он выполнен на микросхемах 564 ТМ2, 564 ПУ6, 1НТ251, 2ТС622А и на двух трансформаторах, согласующих низкое выходное сопротивление преобразователей Холла (5 10 Ом) с выходными сопротивлениями коммутаторов (порядка 100 Ом).
С Холловских выходов преобразователей Холла ДУО сигналы поступают на сумматор 23, на выходе которого выделяются сумма двух импульсных последовательностей, поступающая на выход ФНЧ 24. На выходе ФНЧ 24 выделяется первая гармоника сигнала, фаза которого связана с угловым положением ДУО, поступающая на вход компаратора 25, формирующего из этого сигнала импульса последовательность, передние фронты импульсов которой соответствуют переходу сигнала первой гармоники через "0". Сумматор, ФНЧ и компаратор выполнены на микросхеме 1401 УД2А.
Преобразователь фаза-код, вариант исполнения которого показан на фиг. 6, содержит кварцевый генератор 26, который может блокироваться по входу (режим прибора "Отключено") кнопками с панели прибора, а также разблокироваться и включаться в режим генерации (режим "Включено") кнопками с панели прибора. Он выполнен на микросхеме 564 ТЛ1. Сигнал с генератора fт поступает на вычислитель 1 и на делитель частоты 27, формирующий сетку частот f1, f2, f3 и выполненный на микросхеме 564 И Е10. Сигнал с делителя 27 поступает на вход счетчика 29, выполненного на микросхеме 564ИЕ10, который находится в состоянии запрета счета, определяемого сигналом с выхода триггера 30, выполненного на микросхеме 564ТМ2. Счетчик включается в режим счета в двух случаях: при нажатии кнопок" Компас", "R, a" и "Da" или от импульса датчика шага.
В первом случае сигнал с шины управления по входу 2 преобразователя фаза-код 12 через схему ИЛИ 22 (564 ЛЕ5) обнуляет счетчик 29 и устанавливает в "0" триггер 30, сигнал с выхода которого включает счетчик в режим счета. Длительность этого режима определяется моментом поступления импульса компаратора 25, который устанавливает триггер 30 в "1" и запрещает счет импульсов счетчику 29. Интервал между импульсом обнуления и передним фронтом импульса компаратора соответствует фазовому сдвигу первой гармоники и зависит от углового положения датчика угловой ориентации 13. В этих режимах, как следует из работы схемы, сигнал TRAP не формируется. При движении формируется импульс от датчика шага, который через селектор-формирователь 14 и схему ИЛИ 28 установит счетчик 29 и триггер 30 в "0" и включит счетчик 29 в режим счета. Импульс с селектора-формирователя также через схему задержки 32 (564ТМ2) поступит на вход элемента И (564ЛА7)31. После прихода импульса компаратора триггер 30 заблокирует счетчик 29 и через схему И 31 сформирует импульс TRAP.
В качестве вычислителя использован восьмиразрядный микропроцессорный комплект серии ИМ1821ВМ85А, структурная схема, система команд и назначение выводов которого приведены в [5] В качестве ОЗУ и ПЗУ использованы микросхемы 537РУ9А и 636РТ7А, а в качестве регистров угла и индикации-микросхемы 564ИР6. В качестве схемы управления индикацией использованы микросхемы 564ИР11 и 564ИК2, а в качестве индикаторов индикатор цифровой ЗЛС339А. Схема выбора режима содержит кнопки, выполненные на микропереключателях МП21, два триггера на микросхемам 564ТР2 и 564ТМ2, дешифратор на микросхеме 564ИД1, счетчик на микросхеме 564ИЕ10 и элемент ИСКЛЮЧАЮЩЕЕ ИЛИ на микросхеме 564ЛП2.
Датчик шага выполнен аналогично известному датчику [5] Он содержит корпус, в котором консольно установлена плоская пружина, на которой закреплена ферромагнитная пластина и на конце постоянный магнит, взаимодействующий с герконом, ограничители перемещения подвижной массы. Контактный узел датчика шага содержит магнит и геркон. В исходном состоянии магнит с подвижной пружиной находится в верхнем положении и контакты геркона разомкнуты. Вертикальное ускорение при каждом шаге увеличивает силу тяжести до тех пор, пока магнит с плоской пружиной скачком переместится в нижнее положение и замкнет контакт геркона, включенный в электронную схему, которая формирует импульс. По окончании действия силы ускорения сила тяжести уменьшается и магнит с плоской пружиной возвращается в верхнее положение и процесс при дальнейшем движении повторяется. Таким образом, при каждом шаге формируется импульс. Для устранения дребезга контактов геркона сигнал с геркона подается на селектор-формирователь, формирующий импульс стандартной длительности.
Датчик угловой ориентации содержит намагниченный чувствительный элемент в виде кольцевого магнита с подпятником в центре, который установлен на оси, закрепленной в основании корпуса, выполненного в виде стакана. С противоположной стороны основания корпуса установлены через 90o четыре преобразователя Холла, с которых снимаются электрические сигналы, зависящие от углового положения датчика угловой ориентации. Датчик имеет малые габариты: диаметр 25 мм, высота 14 мм.
Практическое использование предлагаемого прибора по сравнению с прибором-прототипом позволяет:
быстро (без всяких переключений) перенацеливать оператора при достижении одной точки на другую;
обеспечить определение координат объекта (пеленгование), находящегося на удалении от оператора;
записать в процесс движения и сосчитать в дальнейшем координаты контрольных точек маршрута, расположенные между собой на расстоянии, например, сто двадцать восемь шагов;
за счет существенного улучшения массогабаритных характеристик масса 0,8 кг и габариты 35х120х170 мм (у прототипа 2,6 кг, 852х168х200 мм), которые достигнуты путем применения малогабаритного датчика угловой ориентации диаметр 22 и высота 14 мм (у прототипа 70 и 55 мм), аккумуляторов меньшей емкости НКГЦ-0,45 (НКГЦ-1,8 у прототипа) из значительного сокращения органов управления 4 (15 у прототипа), достичь удобного крепления прибора и уменьшить нагрузку на оператора.
Указанные преимущества позволяют расширить функциональные возможности прибора и повысить эффективность его использования. Изготовленные опытные образцы показали высокие точностные характеристики, простоту в управлении и не стесняли действия оператора в процессе движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1992 |
|
RU2039935C1 |
| СИСТЕМА ВНУТРИКОРАБЕЛЬНОЙ ГРОМКОГОВОРЯЩЕЙ СВЯЗИ И ТРАНСЛЯЦИИ | 1996 |
|
RU2131168C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АЭРОФОТОСЪЕМКОЙ | 1997 |
|
RU2138780C1 |
| АНТЕННЫЙ ПОЗИЦИОНЕР | 1992 |
|
RU2060531C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОЦЕНКИ РАБОТЫ ОПЕРАТОРА | 1991 |
|
RU2018971C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ РАДИОТЕЛЕГРАФИСТОВ | 1991 |
|
RU2020538C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ОПЕРАТОРОВ | 1991 |
|
RU2020599C1 |
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ТАКТОВОГО КОЛЕБАНИЯ | 1991 |
|
RU2007881C1 |
| Цифровой компас | 1988 |
|
SU1515050A1 |
Изобретение относится к устройствам для определения пути, пройденного пешим оператором в заданном направлении с применением радиоэлектронных устройств, и может быть использовано в спорте, туризме и других областях. Изобретение обеспечивает определение координат пеленгуемого объекта, запись и считывание контрольных точек маршрута и снижение массогабаритных характеристик. Автономный навигационный прибор содержит вычислитель 1/СР/, П3У3/ROM/, ОЗУ3/RAM/, регистр индикации 4/RGU/, регистр угла 5/RGY/, схему выбора режима работы и ввода данных 6, цифровые индикаторы 7, схему управления индикацией 8, навигационный измеритель 9, электронный ключ 10, формирователь аналоговых сигналов 11, преобразователь фаза-код 12, датчик угловой ориентации 13, селектор-формирователь 14 и датчик шага 15. 1 з.п. ф-лы, 6 ил.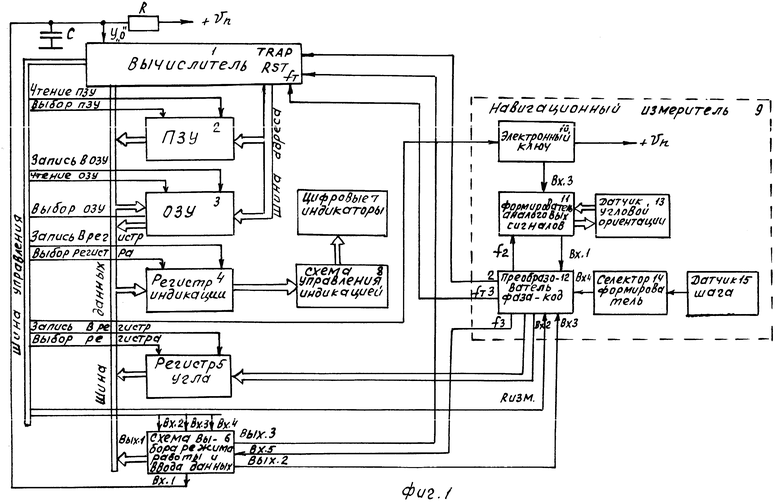

где xi, yi, xконтр.i, yконтр.i- текущие координаты оператора и контрольных точек;
αoi- угол направления движения;
αцi- угол направления на цель;
Δαцi- угол, равный разности между углом направления движения и углом направления на цель;
N количество шагов от 0 до 128;
Rц i расстояние от текущей точки до i-цели;
γ- магнитное склонение;
Ni номер контрольной точки;
N1 i количество шагов оператора, N3 L/N2;
lс р средняя длина шага, м;
xц i, yц i координаты цели;
N2 интервал между контрольными точками через 128 (256, 512) шагов, м;
N3 количество контрольных точек;
L длина маршрута, м.
| Автономный навигационный прибор | |||
| АНП-ЗКМ | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Циркуль-угломер | 1920 |
|
SU1991A1 |
