Изобретение относится к электротехнике и может быть использовано в дискретном электроприводе с ограниченным диапазоном перемещения подвижного элемента.
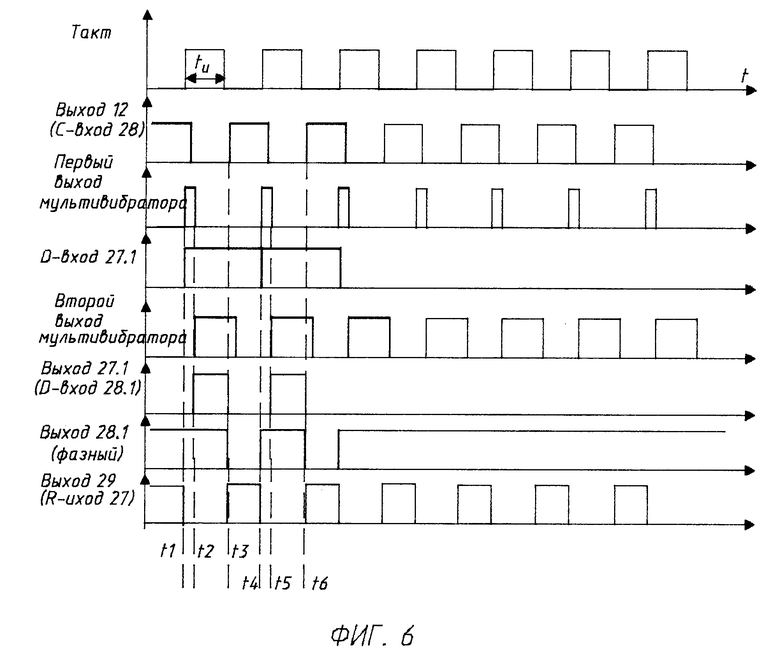
Известен электропривод (ЭП), использующий бесконтактный моментный электродвигатель (БМЭД) постоянного тока [1], работающий в режиме шагового двигателя в соответствии с циклограммой фиг. 1, то есть в режиме четырехфазного двигателя с парной коммутацией. Высокий пусковой момент позволяет применять подобные БМЭД в составе ЭП без редукторов и без датчиков обратной связи (ОС) по положению в системах, где требуется очень высокая надежность в течение длительного срока эксплуатации, например, на долговременных орбитальных космических станциях в системах терморегулирования. Троированные датчики предельных перемещений ограничивают начальное и конечное положения подвижного элемента.
Известен ряд устройств, предназначенных для управления шаговыми двигателями (ШД) с ограниченным диапазоном перемещения подвижного элемента [2], [3] . Известные устройства обеспечивают реверс ШД при срабатывании датчиков предельных перемещений либо блокировку ШД при достижении подвижным элементом конечного положения. Однако в этих устройствах в случае останова ШД (блокировка тактовых сигналов) обмотки двигателя остаются под напряжением, так как распределитель импульсов подключен непосредственно к обмоткам ШД через усилители. При длительных остановках регулятора это вызывает дополнительный расход энергии, чрезмерный перегрев обмоток двигателя, что может привести к выходу его из строя.
Известно также устройство [4], содержащее последовательно соединенные многоканальный усилитель и распределитель импульсов, устройство управления распределителем импульсов, включающее в себя два элемента НЕ, два вентиля, элемент ИЛИ, два триггера, два элемента И и элемент 3И-2ИЛИ-НЕ, счетчик, дешифратор, переключатель импульсов синхронизации, датчики предельных перемещений, элемент ИЛИ, одновибратор, соединенный выходом с первым входом устройства управления распределителем импульсов, а входом-одновременно со вторым входом устройства управления распределителем импульсов и через элемент ИЛИ с выходами датчиков предельных перемещений, при этом третий вход устройства управления распределителем импульсов соединен с шиной задания режима работы, а четвертый и пятый входы соединены с первым и вторым выходами переключателя импульсов синхронизации, первый и второй входы которого соединены с входными шинами устройства, третий вход через последовательно соединенные счетчик и дешифратор соединены с третьим и четверым выходами переключателя импульсов синхронизации.
Из рассмотренных устройств устройство [4] наиболее близко по технической сути и принято за прототип. Недостатком известного решения является также повышенное энергопотребление и перегрев ЭД при длительных остановках в связи с постоянным протеканием тока через фазные обмотки БМЭД, что снижает надежность устройства, а также ограниченность применения, например, невозможность управления ШД в пошаговом режиме.
Техническим результатом предлагаемого изобретения является повышение надежности работы устройства при одновременном снижении энергопотребления (повышение КПД) и расширении функциональных возможностей устройства, так как согласно предлагаемому изобретению управление ЭП может производиться автоматически (от внешнего управляющего устройства (УУ)), автономно (с помощью оператора) и в циклическом режиме (от "упора" до "упора").
Технический результат достигается тем, что в известное устройство, содержащее многоканальный усилитель, распределитель импульсов, датчики предельных перемещений, введены первый и второй мажоритарный элементы, первый и второй электронные переключатели, блок управления режимами работы, блок блокировки распределителя импульсов, блок формирования дискретных импульсов, элемент задержки, ждущий мультивибратор, при этом датчики предельных перемещений через соответствующие мажоритарные элементы соединены с первым и вторым входами первого электронного переключателя, соединенного выходом с первым входом блока управления режимами работы, первый выход которого соединен с входом задания направления счета распределителя импульсов, выполненного на реверсивном счетчике, и четырех восьмиканальных мультиплексорах, причем первый, второй, пятый, шестой каналы первого мультиплексора, второй, третий, шестой, седьмой каналы второго мультиплексора, третий, четвертый, седьмой, восьмой каналы третьего мультиплексора, первый, четвертый, пятый, восьмой каналы четвертого мультиплексора соединены с плюсовой шиной питания, а третий, четвертый, седьмой, восьмой каналы первого мультиплексора, первый, четвертый, пятый, восьмой каналы второго мультиплексора, первый, второй, пятый, шестой каналы третьего мультиплексора, второй, третий, шестой, седьмой каналы четвертого мультиплексора и входы разрешения мультиплексоров соединены с минусовой шиной питания, адресные входы мультиплексоров соединены с выходами счетчика, имеющими вход задания направления счета распределителя импульсов, тактовый вход распределителя импульсов и вход разрешения счета распределителя импульсов, одновременно второй и третий выходы блока управления режимами соединены с первым и вторым входами второго электронного переключателя соответственно, соединенного инверсным выходом с первым входом записи блока формирования дискретных импульсов, а прямым выходом с тактовым входом распределителя импульсов, управляющие выходы которого через блок формирования дискретных импульсов соединены с соответствующими входами многоканального усилителя, при этом информационные выходы блока формирования дискретных импульсов соединены с входами блока блокировки распределителя импульсов, выход которого соединен с входом разрешения счета распределителя импульсов, шина тактовых импульсов одновременно соединена с входом предварительной установки блока формирования дискретных импульсов, входом ждущего мультивибратора, соединенного первым и вторым выходами со вторым и третьим входами соответственно блока управления режимами работы и через элемент задержки со вторым входом записи блока формирования дискретных импульсов.
Такое решение позволяет с высокой достоверностью реализовывать пошаговый с парной коммутацией режим управления БМЭД с длительными возможными остановками в обесточенном состоянии в любой точке диапазона перемещений подвижного элемента в автономном режиме (операторный режим), режим циклической перекладки подвижного элемента внутри рабочего диапазона по командам от датчиков предельных перемещений, а также режим внешнего управления (от микропроцессорного устройства) без потери шага и при минимально необходимой подведенной мощности, при этом в любом режиме длительность формируемого управляющего импульса, подаваемого на обмотку ШД (tи) выбирается заведомо большей механической постоянной времени ЭП (tм): (tи≥4tм) и является величиной фиксированной. Следует отметить, что температура является довольно инерционным параметром, поэтому пошаговый режим управления ЭП не влияет на динамические характеристики контура управления температурой.
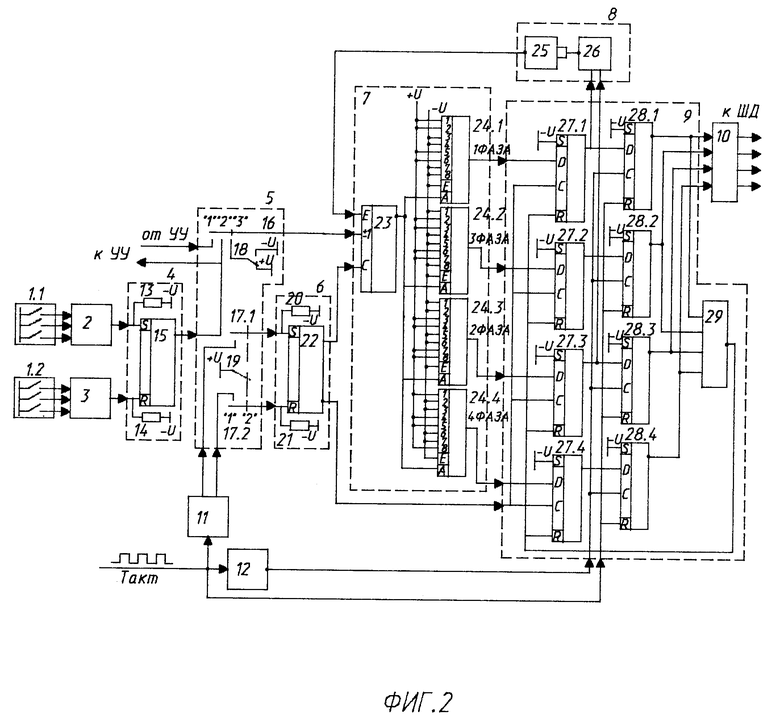
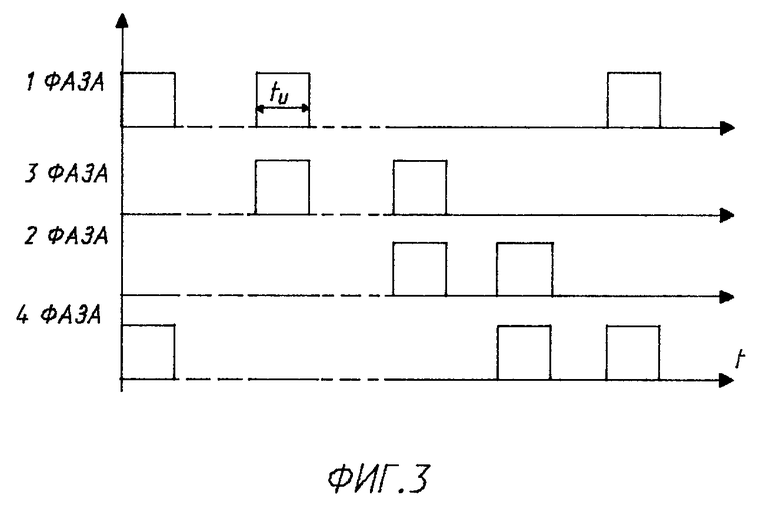
Сущность предлагаемого изобретения поясняется фиг. 1 - циклограмма работы шагового двигателя с парной коммутацией, фиг. 2-структурная схема предлагаемого устройства, фиг. 3-циклограмма работы двигателя в пошаговом режиме, фиг. 4-циклограмма работы предлагаемого устройства в оперативном режиме, фиг. 5-схема ждущего мультивибратора, фиг.6-циклограмма работы устройства в режиме циклических перекладок.
Структурная схема предлагаемого устройства на фиг. 2 содержит: 1- датчики предельных перемещений, 2,3- первый и второй мажоритарный элементы, 4 -первый электронный переключатель, 5-блок управления режимами работы. 6 - второй электронный переключатель, 7 - распределитель импульсов, 8 - блок блокировки распределителя импульсов, 9 - блок формирования дискретных импульсов, 10 - многоканальный усилитель, 11 - ждущий мультивибратор, 12 - элемент задержки, 13, 14, 15 - резисторы и триггер первого электронного переключателя, 16, 17, 18, 19 - переключатели, 20, 21, 22 - резисторы и триггер второго электронного переключателя, 23 - реверсивный счетчик, 24 - мультиплексоры, 25 и 26 - элементы 2ИЛИ-НЕ, 27, 28 - D-триггеры, 29 - элемент 4И-НЕ, при этом три выхода одной группы датчиков предельных перемещений (1.1) и три выхода другой (1.2) соединены с тремя входами первого (2) и тремя входами второго (3) мажоритарных элементов соответственно, соединенных своими выходами с прямым и инверсным входами триггера 15, являющимися первым и вторым входами первого электронного переключателя 4, входы которого через резисторы 13 и 14 соединены с минусовой шиной питания, при этом прямой выход триггера 15, он же выход первого электронного переключателя 4, соединен с первым входом блока управления режимами работы 5, соединенного в блоке 5 с ламелью "2" трехпозиционного переключателя 16, подвижный контакт которого, являющийся первым выходом блока 5, соединен с входом задания направления счета распределителя импульсов 7, ламель "3" переключателя 16 соединена с подвижным контактом двухпозиционного переключателя 18, один из двух неподвижных контактов которого соединен с минусовой шиной питания, а другой - с плюсовой, второй и третий входы блока 5 соединены с первым и вторым выходами соответственно ждущего мультивибратора 11 и в блоке 5 каждый с ламелями "1" двухпозиционного переключателя на два направления 17, каждая ламель "2" которого соединена с соответствующим неподвижным контактом двухпозиционного переключателя 19, подвижный контакт которого соединен с плюсовой шиной питания. Подвижные контакты переключателя 17, являющиеся вторым и третьим выходами блока 5, соединены с прямым и инверсным входами триггера 22 соответственно, являющимися первым и вторым входами второго электронного переключателя 6, входы которого через резисторы 20 и 21 соединены с минусовой шиной питания, при этом прямой выход триггера 22, он же прямой выход второго электронного переключателя 6, соединен с тактовым входом распределителя импульсов 7, инверсный же выход триггера 22, являющийся вторым выходом второго электронного переключателя 6, соединен с первым входом записи блока формирования дискретных импульсов 9, соединенного в блоке с C-входами триггеров 27, R-входы которых объединены и соединены с выходом элемента 4И-НЕ 29, входы которого одновременно соединены с соответствующими входами многоканального усилителя 10 и с инверсными выходами триггеров 28, S-входы которых соединены с минусовой шиной питания, R-входы также объединены и через вход предварительной установки блока формирования дискретных импульсов 9 соединены с тактовой шиной, с входами ждущего мультивибратора 11 и с входом элемента задержки 12, инверсный выход которого через второй вход записи блока формирования дискретных импульсов 9 соединен с C-входами триггеров 28, D-входы которых соединены с прямыми выходами соответствующих триггеров 27, S-входы которых соединены с минусовой шиной питания, а D-входы - с выходами соответствующих мультиплексоров 24, при этом первый, второй, пятый шестой каналы мультиплексора 24.1, второй, третий, шестой, седьмой каналы мультиплексора 24.2, третий, четвертый, седьмой, восьмой каналы мультиплексора 24.3, первый, четвертый, пятый, восьмой каналы мультиплексора 24.4 соединены с плюсовой шиной питания, а третий, четвертый, седьмой, восьмой каналы мультиплексора 24.1, первый, четвертый, пятый, восьмой каналы мультиплексора 24.2, первый, второй, пятый, шестой каналы мультиплексора 24,3, второй, третий, шестой, седьмой каналы мультиплексора 24.4 и входы разрешения (E) соединены с минусовой шиной питания, трехразрядные адресные входы мультиплексоров (A) соединены с выходом счетчика 23, вход разрешения счета распределителя импульсов 7 соединен с выходом блока блокировки распределителя импульсов 8, он же выход элемента 2ИЛИ-НЕ 25, соединенного входами через элемент 2ИЛИ-НЕ 26 с первым и вторым входами блока блокировки распределителя импульсов 8, каждый из которых, в свою очередь, соединен с выходом триггера 27.1 и 27.3, являющихся информационными выходами блока формирования дискретных импульсов 9. Дополнительно ламели "1" и "2" переключателя 16 блока 5 имеют входы для подключения внешнего управляющего устройства. При таком построении предлагаемое устройство реализует пошаговый режим управления ЭП в соответствии с циклограммой фиг. 3.
Устройство работает следующим образом.
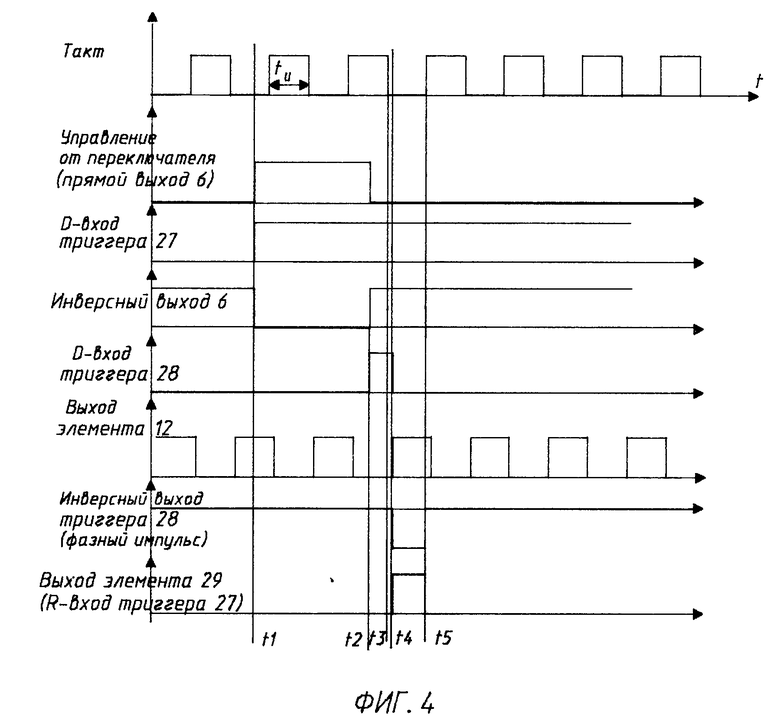
В операторном режиме, применяемом в основном для проведения работ на контрольно-испытательной станции, регламентных работ, работ на технической позиции в составе изделия, проведения конструкторско-доводочных испытаний приводов, построенных на основе БМЭД, реализуется пошаговое управление с возможными длительными остановками в любой точке рабочего диапазона. В этом режиме на блоке управления режимами работы 5 оператор устанавливает переключатель 16 в положение "3", переключатель 17 в положение "2". С помощью переключателя 18 выбирается направление движения подвижного элемента "влево"-"вправо". На шине тактовых импульсов присутствует последовательность импульсов (меандр). Команда на перемещение подвижного элемента ЭП подается оператором посредством замыкания и размыкания переключателя 19. Работа схемы поясняется циклограммой на фиг. 4. Триггер 22 импульсов с прямого выхода (момент t1) изменяет на единицу состояние счетчика 23, который, в свою очередь, в соответствии с адресным кодом управляет подключением входных шин (управляющих кодов ШД) мультиплексоров 24 к их выходам. На выходе мультиплексоров появляется соответствующий код. Мультиплексор-микросхема 564КП2.
Известно [5] , что алгоритм работы распределителя импульсов зависит от выбранного способа управления электродвигателем, при этом схемные решения при реализации распределителя импульсов могут быть различными, например, на цифровых микросхемах средней степени интеграции [5], либо с использованием запоминающих устройств [6], [7]. Наиболее близким к решаемой задаче является устройство согласно [6], содержащее реверсивный счетчик и мультиплексоры, и обеспечивающее режим управления ШД с обесточиванием обмоток в случае его останова. Однако это происходит только при подаче на шину стробирования (вход разрешения счета) распределителя импульсов запрещающего сигнала, который необходимо еще каким-то образом сформировать, а затем и снять. При этом, судя по описанию, момент обесточивания обмоток не учитывает механическую постоянную времени ЭП, то есть обесточивание обмоток с одновременным запоминанием кода адреса команды может произойти, когда ШД только начал движение и еще не отработал команду управления, например, при срабатывании датчика предельных перемещений. В этом случае под действием электромагнитного поля, создаваемого постоянными магнитами ШД, привод возвращается в предыдущее состояние. Тогда в момент повторного включения может произойти потеря шага или кратковременный реверс ШД, так как нарушается порядок коммутации фаз ШД (см. фиг. 3). Кроме того, наличие нескольких входных шин согласно [6], как-то: строб, такт, управление, реверс предполагает наличие алгоритма, определяющего взаимосвязь сигналов на этих шинах, однако в описании алгоритм и устройство, его реализующее, не нашли отражения. В предлагаемом устройстве схема распределителя импульсов построена несколько иначе, причем с жесткой организацией и взаимосвязью сигналов, определяющих надежное формирование фазных импульсов в любой точке рабочего диапазона с обесточиванием фазных обмоток на каждом шаге.
Код с выходов мультиплексоров 24 поступает на D-входы триггеров 27 в блоке формирования дискретных импульсов 9 и записывается в триггеры 27 задним фронтом пускового импульса, поступающего с инверсного выхода триггера 22 при размыкании переключателя 19 (момент t2), при этом резисторы 20 и 21 фиксируют состояние триггера 22 при переключениях, обеспечивая устранение дребезга контактов переключателя 19. При появлении на выходе триггеров 27 положительного перепада импульсов управляющего кода срабатывает блок блокировки распределителя импульсов 8, закрывая счетчик 23 по входу E и блокируя, таким образом, на момент формирования и до выдачи на обмотки ШД кодов как несанкционированные действия оператора, так и воздействие возможных помех. Из циклограммы фиг. 1 очевидна достаточность для подобного контроля наличия любых двух фаз БМЭД, смещенных на Tи. С выходов триггеров 27 коды поступают на D-входы триггеров 28 и записываются в них по C-входам первым же импульсом, поступающим с шины тактовых импульсов через элемент задержки с инверсией 12 (момент t4), реализованный на трех инверторах 564ЛН2. Элемент задержки 12 обеспечивает разнесение во времени (интервал t3-t4) моментов записи информации в триггеры 28 и их сброса. Перед записью триггеры 28 обнуляются по R-входам предыдущим импульсом последовательности тактовых импульсов. В момент появления одного из двух либо двух одновременно импульсов (двух логических нулей) на инверсных выходах двух из любых триггеров 28 элемент 4И-НЕ (29) подает команду на обнуление триггеров 27 и, соответственно, обнулению данных на D-шинах триггеров 28 и переводу счетчика 23 в режим приема информации. Триггеры 28 тут же обнуляются по R-входам следующим импульсом из последовательности импульсов, формируя задний фронт фазного импульса с длительностью, равной длительности импульса tи (момент t5). Такое построение схемы позволяет исключить сбой импульса управления и нарушение его длительности на все время формирования, так как счетчик 23 и триггеры 27, 28 закрыты для приема информации на момент формирования фазных импульсов, а длительность фазного импульса определяется длительностью тактового импульса, параметры которого всегда регламентируются. С выходов триггеров 28 фазные импульсы через усилители 10 поступают на фазные обмотки БМЭД. Устройство имеет счетчик шагов (команд), автономную установку счетчика 23, телеметрический потенциометр перемещения подвижного элемента, а также светодиодную индикацию работы фазных обмоток и крайних положений подвижного элемента (не показаны).
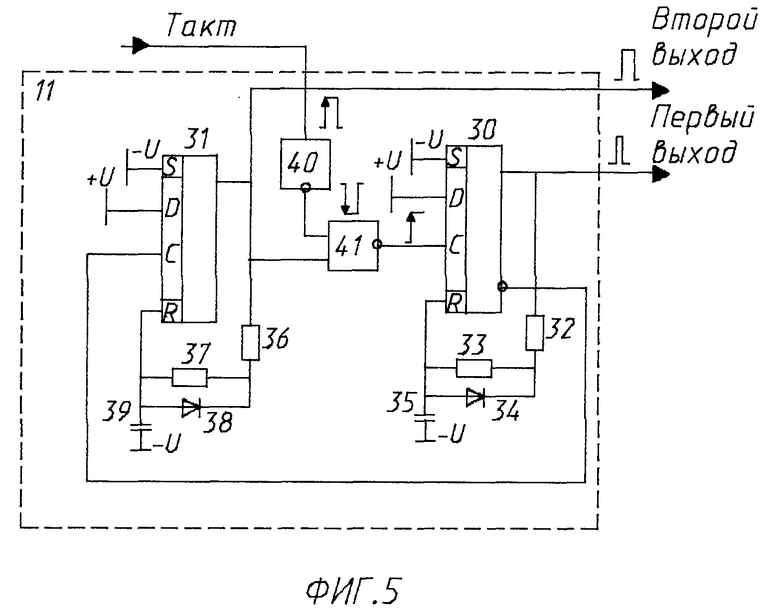
В циклическом режиме - основное назначение которого - испытания на ресурс, оператор, управляя ЭП, устанавливает подвижный элемент в одно из крайних положений до замыкания датчиков предельных перемещений, выключает генератор импульсов, устанавливает переключатели 16 и 17 в положения "2" и "1" соответственно и снова включает генератор. Команды управления перемещением подвижного элемента формируются ждущим несимметричным мультивибратором 11, схема которого приведена на фиг. 5, а циклограмма работы устройства в этом режиме приведена на фиг. 6. Мультивибратор 11 содержит 30, 31-триггеры, 32, 33-резисторы, 34-диод, 35-конденсатор: - элементы первой времязадающей цепи, 36, 37-резисторы, 38-диод, 39-конденсатор: - элементы второй времязадающей цепи, 40 - инвертор, 41-элемент 2ИЛИ-НЕ. При поступлении импульса на мультивибратор 11, одновибратор на триггере 30 формирует на первом выходе мультивибратора импульс длительностью ≈ 0,1tи, который, заряжая конденсатор 35 по мере достижения напряжения срабатывания на R-входе, перебрасывает триггер 30 в исходное состояние, при этом передним фронтом импульса с инверсного выхода триггера 30 запускается одновибратор на триггере 31, формирующий на втором выходе мультивибратора импульс длительностью ≈ 1,8 tи и работающий аналогично 30. Элементы 33, 35 и 37, 39, соответственно, служат для задания длительности импульсов, элементы 32, 34, 36, 38 для формирования фронтов и обеспечения режима работы выходов триггеров по току. Инвертор 40 и элемент 2ИЛИ-НЕ 41 обеспечивают запуск мультивибратора при поступлении тактового импульса на вход. Импульс с первого выхода мультивибратора (момент t1) изменяет состояние счетчика 23 на единицу, обеспечивая тем самым изменение кода адреса мультиплексоров 24 и подключая соответствующий вход мультиплексора на D-вход соответствующего триггера 27. (На фиг. 6 показано состояние D-входа триггера 27.1 для кодов мультиплексора 24.1 "000" и "001". Счетчик 23 обеспечивает циклический перебор адресов мультиплексоров 24 во всем диапазоне перемещений подвижного элемента). По переднему фронту импульса, поступающего со второго выхода мультивибратора 11 (момент t2) информация с D - входов записывается в триггеры 27, при этом срабатывает блок 8 и блокирует своим сигналом счетчик 23, запоминая адресные и управляющие коды, а информация с выходов триггеров 27 поступает на D - входы триггеров 28, в который она записывается передним фронтом импульса, поступающего на C - вход с выхода 12 (момент t3). Триггеры 28 предварительно обнуляются тактовым импульсом. При появлении на выходах триггеров 28 импульсов (двух логических нулей) тут же срабатывает элемент 29, обнуляя триггеры 27 и разрешая тем самым работу счетчика 23. В момент t4 импульсом с шины тактовых импульсов триггеры 28 обнулятся, формируя тем самым задний фронт фазного импульса. В моменты t5 и t6 последовательность формирования фазных импульсов повторяется. Длительность фазного импульса в этом режиме составляет 0,9tи. При достижении крайнего положения по срабатыванию двух из трех датчиков предельных перемещений 1, мажоритарный элемент (схема голосования "два из трех"-микросхема 564ЛП13) 2 либо 3 формирует на своем выходе "1", изменяя таким образом состояние триггера 15 на противоположное, что ведет к изменению режима работ счетчика 23 (сложение либо вычитание), и, соответственно, к реверсу БМЭД. При отходе подвижного элемента от конечного положения, определенного установкой соответствующей группой датчиков предельных перемещений, датчики снова размыкаются, при этом триггер 15 "запоминает" информацию о направлении движения до срабатывания следующей группы датчиков предельных перемещений. Назначение резисторов 13 и 14 аналогично 20 и 21. При замыкании датчиков предельных перемещений в любой момент времени, блок формирования дискретных импульсов 9 обеспечивает формирование полного фазного импульса, а затем уже реализует реверс двигателя, что исключает возможную потерю шага и кратковременную потерю направления движения. Следует отметить, что в подобных системах датчики предельных перемещений ("электрический упор") устанавливаются как минимум за шаг до механического упора, чтобы исключить возможные конфликтные ситуации.
В режиме управления от УУ устройство работает в составе контура управления температурой. В этом режиме (переключатели 16 и 17 в положении "1") УУ управляет БМЭД по командам от датчиков температуры (не показаны), команда на реверс БМЭД от датчиков предельных перемещений используется УУ как защитная функция системы. Генератор импульсов в этом случае в составе УУ.
Предлагаемое устройство по сравнению с известным обладает более высокой надежностью, автономностью, универсальностью и экономичностью, что позволяет с успехом его применять при самых различных режимах работы ЭП в течение всего цикла разработки и эксплуатации электроприводов, построенных с использованием БМЭД.
Литература
1. Беленький Ю.М., Зеленков Г.С., Микеров А.Г. Опыт разработки и применения бесконтактных моментных приводов.-Л.: ЛДНТП, 1987.
2. Авторское свидетельство СССР N 1439731, кл. H 02 P 8/00.
3. Авторское свидетельство СССР N 1458964, кл. H 02 P 8/00.
4. Авторское свидетельство СССР N 951622, кл. H 02 P 8/00.
5. Герман-Галкин С. Г. и др. Цифровые электроприводы с транзисторными преобразователями.-Л.: Энергоатомиздат, 1986, с. 55-68.
6. Авторское свидетельство СССР N 1474822, кл. H 02 P 8/00.
7. Авторское свидетельство СССР N 2041559, кл. H 02 P 8/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ЧЕТЫРЕХФАЗНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2133550C1 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| СПОСОБ ИНТЕНСИФИКАЦИИ ЭЛЕКТРОХИМИЧЕСКИХ ПРОЦЕССОВ ПРИ ПРЕОБРАЗОВАНИИ ХИМИЧЕСКОЙ ЭНЕРГИИ В ЭЛЕКТРИЧЕСКУЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2134922C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| ИМИТАТОР НАГРУЗКИ ДЛЯ ИСПЫТАНИЙ УПРАВЛЯЕМОГО КЛЮЧА | 1998 |
|
RU2138850C1 |
| АВТОМАТИЧЕСКОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2109318C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ | 1997 |
|
RU2116617C1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2131544C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
| АВТОМАТИЗИРОВАННОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2103717C1 |
Устройство предназначено для автоматического (микроконтроллера), автономного (с участием оператора) и циклического (от датчиков предельных перемещений) пошагового управления различными дискретными исполнительными механизмами с шаговыми электродвигателями и ограниченным диапазоном перемещения подвижного элемента. Техническим результатом изобретения является повышение надежности в работе устройства при одновременном снижении энергопотребления и расширении функциональных возможностей. Устройство содержит распределитель импульсов, многоканальный усилитель, датчики предельных перемещений, первый и второй мажоритарный элементы, первый и второй электронные переключатели, блок управления режимами работы, блок блокировки распределителя импульсов, блок формирования дискретных импульсов, элемент задержки, ждущий мультивибратор, при этом устройство обеспечивает формирование команд во всех режимах без потери шага и обесточивания фазных обмоток ШД по завершении импульса управления. Это достигается за счет формирования в устройстве фазных импульсов управления ШД, передние и задние фронты которых синхронизированы с передним и задним фронтами тактового импульса, поступающего непосредственно с тактовой шины и с инверсией через элемент задержки на второй вход записи и установочный вход блока формирования дискретных импульсов, причем по командам с информационных выходов блока формирования дискретных импульсов на момент формирования фазных импульсов распределитель импульсов через блок блокировки распределителя импульсов закрывается по входу разрешения счета. 6 ил.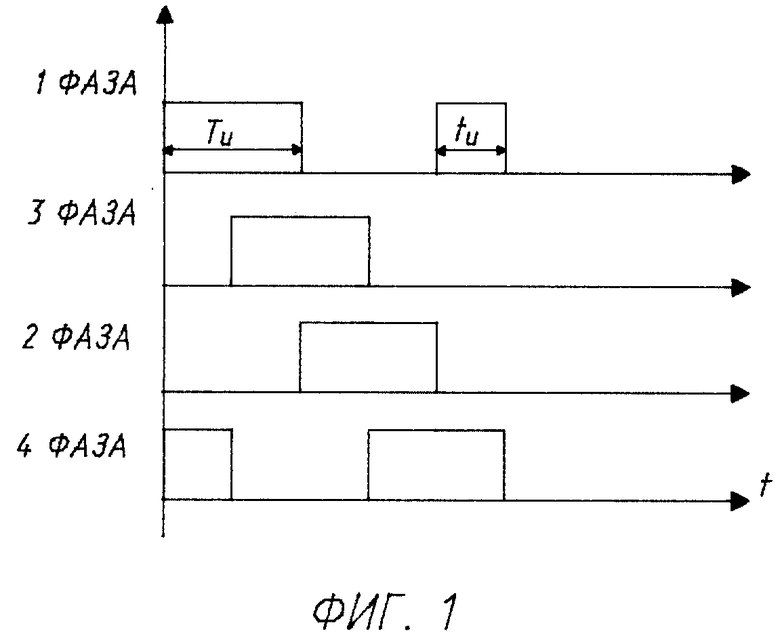
Устройство для управления шаговым двигателем, содержащее многоканальный усилитель, распределитель импульсов, датчики предельных перемещений, отличающееся тем, что в него введены первый и второй мажоритарные элементы, первый и второй электронные переключатели, блок управления режимами работы, блок блокировки распределителя импульсов, блок формирования дискретных импульсов, элемент задержки, ждущий мультивибратор, при этом датчики предельных перемещений через соответствующие мажоритарные элементы соединены с первым и вторым входами первого электронного переключателя, соединенного выходом с первым входом блока управления режимами работы, первый выход которого соединен с входом задания направления счета распределителя импульсов, выполненного на реверсивном счетчике и четырех восьмиканальных мультиплексорах, причем первый, второй, пятый и шестой каналы первого мультиплексора, второй, третий, шестой и седьмой каналы второго мультиплексора, третий, четвертый, седьмой и восьмой каналы третьего мультиплексора, первый, четвертый, пятый и восьмой каналы четвертого мультиплексора соединены с плюсовой шиной питания, а третий, четвертый седьмой и восьмой каналы первого мультиплексора, первый, четвертый, пятый и восьмой каналы второго мультиплексора, первый, второй, пятый и шестой каналы третьего мультиплексора, второй, третий, шестой и седьмой каналы четвертого мультиплексора и входы разрешения мультиплексоров соединены с минусовой шиной питания, адресные входы мультиплексоров соединены с выходами счетчика, имеющего вход задания направления счета распределителя импульсов, тактовой вход распределителя импульсов и вход разрешения счета распределителя импульсов, одновременно второй и третий выходы блока управления режимами работы соединены с первым и вторым входами второго электронного переключателя соответственно, соединенного инверсным входом с первым входом записи блока формирования дискретных импульсов, а прямым выходом с тактовым входом распределителя импульсов, управляющие выходы которого через блок формирования дискретных импульсов соединены с соответствующими входами многоканального усилителя, при этом информационные выходы блока формирования дискретных импульсов соединены с выходами блока блокировки распределителя импульсов, выход которого соединен с выходом разрешения счета распределителя импульсов, шина тактовых импульсов одновременно соединена с входом предварительной установки блока формирования дискретных импульсов, входом ждущего мультивибратора, соединенного первым и вторым выходами с вторым и третьим входами соответственно блока управления режимами работы и через элемент задержки с вторым входом записи блока формирования дискретных импульсов.
| Устройство для управления шаговым двигателем | 1980 |
|
SU951622A1 |
| SU 1592910 A1, 15.09.90 | |||
| Устройство для управления шаговым двигателем | 1988 |
|
SU1527702A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1443117A1 |
| US 4703244 A 27.10.87. | |||
