Изобретение относится к системам автоматического регулирования и может быть использовано в системах управления различными инерционными объектами, например поворотными платформами, промышленными работами, летательными аппаратами.
Известен релейный регулятор, содержащий сумматор, релейный элемент, охваченный интегрирующей отрицательной обратной связью, и управляемый формирователь импульсов.
Недостаток этого устройства состоит в том, что он имеет низкую помехозащищенность и ограниченный рабочий диапазон, определяемый линейной (информационной) зоной датчика позиционного отклонения.
Наиболее близким техническим решением к предлагаемому является релейный регулятор, содержащий последовательно соединенные сравнивающее устройство, усилитель с ограничением, сумматор, интегратор, релейный элемент и формирователь релейного сигнала с задержкой на выключение. Выход интегратора соединен с инвертирующим входом сравнивающего устройства, а выход релейного элемента - с инвертирующим входом сумматора.
Недостатком этого регулятора является то, что он оказывается неработоспособным, если поступающая на его вход информация от датчика позиционного отклонения имеет дискретную форму в виде последовательности импульсов (появление каждого импульса соответствует позиционному отклонению регулируемого параметра на некоторую малую величину Δ , например изменению положения регулируемого объекта на указанную величину), и датчики позиционного отклонения расположены неортогонально при взаимно-перпендикулярном расположении исполнительных органов объекта управления, что, например, имеет место в системах управления летательными аппаратами.
Задача изобретения - расширение функциональных возможностей релейного регулятора за счет достижения работоспособности при использовании дискретных датчиков позиционного отклонения, расположенных неортогонально.
Сущность изобретения состоит в том, что в релейный регулятор, содержащий последовательно соединенные сравнивающее устройство, усилитель с ограничителем, сумматор, интегратор, релейный элемент и формирователь релейного сигнала с задержкой на выключение, при этом выход интегратора соединен с инвертирующим входом сравнивающего устройства, а выход релейного элемента - с инвертирующим входом сумматора, введены два канала управления, при этом каждый канал управления дополнительно содержит реверсивный счетчик, преобразователь код-напряжение, входы которого соединены с соответствующими выходами реверсивного счетчика, первый и второй формирователь эталонного сигнала амплитуды Ua и длительности τ0 , входы которых соединены с соответствующими входами приема дискретного сигнала позиционного отклонения дискретности Δ релейного регулятора и реверсивного счетчика каждого канала управления, а выходы - с соответствующими входами сумматоров всех каналов управления при коэффициентах передачи +mij и -mij где i (i=1, 2, 3) - номер канала управления, а j (j=1, 2, 3) - номер входа в каждом канале управления, при этом выход преобразователя код-напряжение каждого канала управления подключен к неинвертирующим входам сравнивающих устройств всех каналов управления при коэффициентах передачи Kij, а параметры Ua и τ0 выбираются из соотношения Ua• τ0 = Δ.
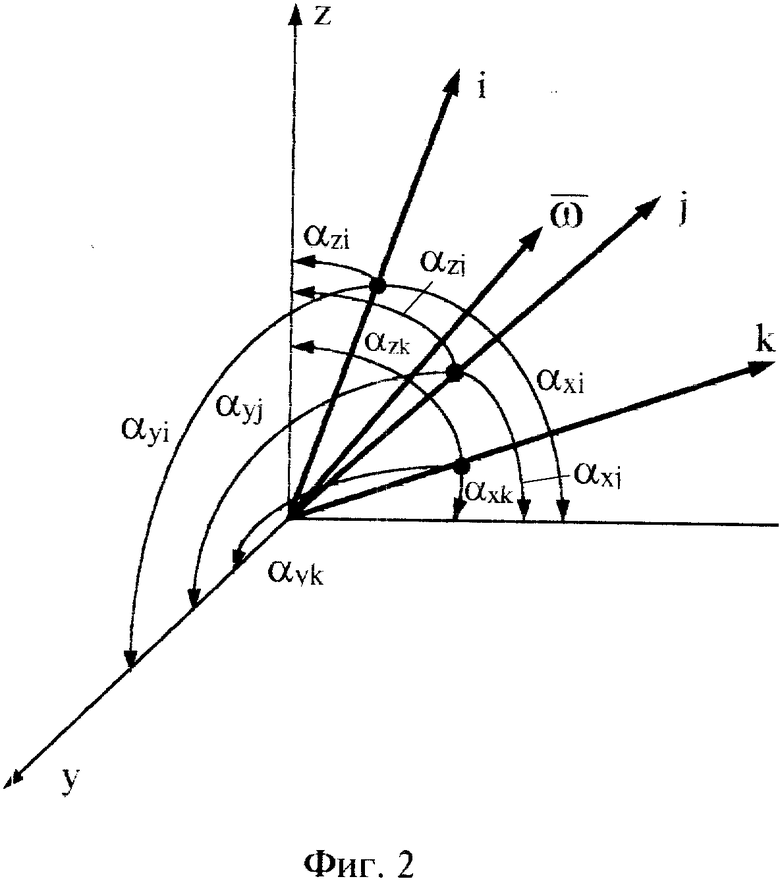
На фиг.1 представлена структурная схема релейного регулятора, на которой показано: 1 - первый канал управления; 2 - второй канал управления; 3 - третий канал управления; 4 - сравнивающее устройство; 5 - усилитель с ограничением; 6 - сумматор; 6-1, 6-2, 6-3 - входы шины (на 6 входов каждая) сумматоров 6 в каналах управлениях 1, 2 и 3 соответственно; 7 - интегратор; 8 - релейный элемент; 9 - формирователь релейного сигнала с задержкой на выключение; 10 - реверсивный счетчик; 11 - преобразователь код-напряжение (ПКН); 12, 13 - первый и второй формирователи эталонного сигнала амплитуды Ua и длительности τ0; 14, 15 - входы приема дискретного сигнала позиционного отклонения (дискретности Δ). На фиг.2: x, y, z - ортогональная система координат, относительно которой осуществляется управление, i, j, k - направления осей чувствительности датчиков позиционного отклонения, αp,r (p=x, y, z, r= i, j, k)- углы между соответствующими осями x, y, z и i, j, k,  - вектор отклонения.
- вектор отклонения.
Релейный регулятор выполнен следующим образом.
В каждом канале входы 14 и 15 приема дискретных сигналов + ωi,j,k и -ωi,j,k соединены с входами счетчика 10 и входами формирователей 12 и 13. Параллельный выход счетчика 10 соединен с параллельным входом ПКН 11, выход которого соединен с одним неинвертирующим входом блока 4. С его остальными (двумя) неинвертирующими входами соединены выходы блоков 11 других каналов управления (1, 2, 3). Блоки 4 - 9 соединены последовательно, при этом выход формирователя 9 является выходом релейного регулятора. Блоки 5 - 7 охвачены цепью отрицательной обратной связи за счет соединения выхода интегратора 7 с инвертирующим входом блока 4. Блоки 7 и 8 охвачены цепью отрицательной обратной связи путем соединения выхода релейного элемента 8 с инвертирующим входом сумматора 6, с остальными (шестью) неинвертирующими входами которого соединены выходы формирователей 12 и 13 каналов управления 1, 2 и 3.
Прежде чем перейти к описанию работы устройства по фиг.1, найдем соотношения между показаниями датчиков позиционного отклонения и значениями отклонений в координатах x, y, z. Пусть объект управления имеет отклонение  - вектор, произвольно расположенный в пространстве). Считаем, что датчик позиционного отклонения осуществляет измерение отклонения только в направлении своей измерительной оси (оси чувствительности) r (r=i, j, k). В этом случае
- вектор, произвольно расположенный в пространстве). Считаем, что датчик позиционного отклонения осуществляет измерение отклонения только в направлении своей измерительной оси (оси чувствительности) r (r=i, j, k). В этом случае
где - векторные составляющие отклонения
- векторные составляющие отклонения  , измеренные датчиками позиционного отклонения.
, измеренные датчиками позиционного отклонения.
Фактическое отклонение  в координатах x, y, z можно представить в виде
в координатах x, y, z можно представить в виде

ωx , ωy , ωz - значения составляющих отклонения в осях x, y, z соответственно (скалярные величины),
ωi , ωj , ωk - - показания датчиков позиционного отклонения (скалярные величины).
В канале управления 1 сигналы ϕ и UΩ , поступающие соответственно на входы блоков 4 и 6, имеют коэффициенты передачи:
- для сигналов 

- для сигналов 

- для сигналов 

Аналогично в канале управления 1 сигналы ϕ и UΩ , поступающие соответственно на входы блоков 4 и 6 имеют коэффициенты передачи:
для сигналов 

для сигналов 

для сигналов 

В канале управления 3:
для сигналов 

для сигналов 

для сигналов 

Ниже приводится описание работы заявляемого устройства.
Остановимся вначале на качественных характеристиках входного сигнала, поступающего на релейный регулятор.
Предполагается, что сигнал позиционного отклонения представляет собой последовательность импульсов, каждый из которых формируется (и появляется) на выходе датчика при изменении позиционного отклонения объекта относительно оси чувствительности на некоторую малую величину Δ (дискретность датчика). При этом в зависимости от знака отклонения импульсы формируются на соответствующем выходе датчика - сигнал положительного отклонения +ω и сигнал отрицательного отклонения -ω . Эти сигналы поступают соответственно на входы 14 и 15 каждого канала управления (1, 2, 3) релейного регулятора. При этом сигналы датчиков с осями чувствительности i, j и k поступают на входы каналов управления 1, 2 и 3 соответственно.
При поступлении каждого входного импульса на входы формирователей 12 и 13 ими формируются импульсы заданной амплитуды Ua и длительности τ0 , в следующем соотношении:
При этом на выходе формирователя 12 образуется сигнал  отрицательной полярности, а на выходе формирователя 13 - сигнал
отрицательной полярности, а на выходе формирователя 13 - сигнал  положительной полярности.
положительной полярности.
Выходной сигнал ϕi ПКН 11 канала 1 пропорционален числу n - алгебраической суммы входных импульсов ±ωi и может быть записан в виде
ϕi = n • Δ , (16)
что совпадает с фактическим отклонением в моменты времени ti выдачи импульсов ±ωi.
Сигнал ϕi определяет позиционное отклонение объекта относительно оси i и отличается от фактического в любой момент времени t не более чем на малую величину Δ (за счет модуляции по амплитуде). В соответствии со схемой (фиг. 1) и с учетом (3) - (14) входной сигнал блока 4 канала 1 определяется в виде
где ϕj и ϕk - выходные сигналы ПКН 11 каналов 2 и 3 соответственно, определяются аналогично (16), Xi, Xj и Xk - входные сигналы блока 4 первого канала от ПКН канала 1, канала 2 и канала 3 соответственно. Сигнал X определяет позиционное отклонение объекта управления относительно оси X (фиг.2) и в соответствии с (16) и (17) отличается от фактического отклонения не более чем на малую величину
Аналогично можно утверждать, что входной сигнал сравнивающего устройства 4 каналов 2 и 3 определяет позиционное отклонение объекта управления относительно оси y и z соответственно и отличается от фактического не более чем на малую величину δ.
Скорость позиционного отклонения  объекта отклонения относительно оси x при расположении датчиков в направлении измерительных осей i, j, k определяется аналогично (3). Покажем, что изменения выходного сигнала Ix интегратора 7 канала 1 будут практически одинаковыми, как в случае подачи на его вход аналогового сигнала, так и в случае подачи дискретного сигнала (по заявляемому устройству).
объекта отклонения относительно оси x при расположении датчиков в направлении измерительных осей i, j, k определяется аналогично (3). Покажем, что изменения выходного сигнала Ix интегратора 7 канала 1 будут практически одинаковыми, как в случае подачи на его вход аналогового сигнала, так и в случае подачи дискретного сигнала (по заявляемому устройству).
Если на вход интегратора 7 подается непрерывный сигнал U (для простоты считаем, что он постоянен по величине), то выходной сигнал Ix интегратора 7 будет равен
I=U•t,
где
t -текущее время.
В рассматриваемом случае изменение позиционного отклонения происходит с постоянной скоростью, например, в направлении от оси  (фиг.2).
(фиг.2).
С датчиков позиционного отклонения на входы 14 и 15 поступают импульсы, знак и частота следования которых будут определяться значением скорости изменения позиционного отклонения. Если, например, скорость позиционного отклонения в направлении оси I равно Ui, то частота  поступления импульсов будет определяться равенством
поступления импульсов будет определяться равенством
Так как Ui определяется скоростью изменения позиционного отклонения, то его изменение на величину Δ произойдет за время T, причем  , откуда и следует равенство (20)
, откуда и следует равенство (20)
При отклонении объекта со скоростью  значение скорости отклонения ωx относительно оси x определяется (3). Определим изменение сигнала Ix интегратора 7 канала 1 в рассматриваемом случае. С учетом (15) выходной сигнал Ix интегратора 7 в момент времени t можно записать в виде
значение скорости отклонения ωx относительно оси x определяется (3). Определим изменение сигнала Ix интегратора 7 канала 1 в рассматриваемом случае. С учетом (15) выходной сигнал Ix интегратора 7 в момент времени t можно записать в виде
где
ni - алгебраическая сумма импульсов ±ωi с выхода датчика оси i, nj - алгебраическая сумма импульсов ±ωj с выхода датчика оси j (на входах 14 и 15 канала 2), nk - алгебраическая сумма импульсов ±ωk с выхода датчика оси k, (на входах 14 и 15 канала 3) за время t.
В случае использования непрерывного сигнала на входе интегратора 7 в канале 1 его выходной сигнал  был бы равен
был бы равен
где
ωx - определяется выражением (3)
Так как сигнал ωi•t отличается от сигнала ni•Δ не более чем на малую величину Δ аналогично и для сигналов ωj•t и ωk•t то сигнал  отличается от сигнала Ix не более чем на малую величину δ (18).
отличается от сигнала Ix не более чем на малую величину δ (18).
Аналогичные заключения можно сделать и о сигналах Iy интегратора 7 в канале 2 и сигналах Iz интегратора 7 в канале 3.
Таким образом, в рассматриваемой схеме (фиг.1) входной сигнал X (17) сравнивающего устройства 4 в любой момент времени t с точностью до малой величины δ совпадает с фактическим значением позиционного отклонения. Выходной сигнал Ix интегратора 7 отличается от его входного сигнала  в случае подачи на его вход непрерывного сигнала скорости изменения позиционного отклонения также не более чем на малую величину δ, т.е. можно считать, что формирование выходного сигнала Mx рассматриваемым релейным регулятором будет одинаковым вне зависимости от того, подается ли на вход сравнивающего устройства 4 и интегратора 7 непрерывный или дискретный сигнал.
в случае подачи на его вход непрерывного сигнала скорости изменения позиционного отклонения также не более чем на малую величину δ, т.е. можно считать, что формирование выходного сигнала Mx рассматриваемым релейным регулятором будет одинаковым вне зависимости от того, подается ли на вход сравнивающего устройства 4 и интегратора 7 непрерывный или дискретный сигнал.
Пусть в начальный момент времени реверсивные счетчики 10 каждого канала обнулены и на входы 14 и 15 начинают поступать импульсы ±ωi,±ωj,±ωk. Выходные сигналы ПКН 11 канала 1 - ϕi, канала 2 - ϕj и канала 3 - ϕk начинают изменяться. Для простоты рассмотрим работу канала 1. Входные сигналы сравнивающего устройства 4 и сумматора 6 изменяют выходной сигнал Ix интегратора 7. При значении сигнала Ix=h (h - уровень включения релейного элемента 8) срабатывает релейный элемент 8 и одновременно включается формирователь 9, выходной сигнал Mx которого является выходом канала 1 релейного регулятора. Формирователь 9 представляет собой релейный элемент с временной задержкой на выключение. Срабатывание формирователя 9 происходит по срабатыванию релейного элемента 8, а выключение - через время τ после выключения релейного элемента 8.
При поступлении сигналов на входы сравнивающего устройства 4 и сумматора 6 в контуре сравнивающее устройство 4, усилитель с ограничением 5, сумматор 6, интегратор 7, релейный элемент 8 возникает "скользящий режим", для которого характерно переключение релейного элемента 8 с частотой fp, определяемой скоростью изменения входного сигнала сравнивающего устройства 4 и входным сигналом интегратора 6.
Если
fр > 1/τ, (23)
то выходной сигнал Mx регулятора непрерывен.
Если
fр < 1/τ, (24)
то выходной сигнал Mx регулятора - релейно-импульсный, частоты fp и длительности τ.
Выбором наклона и ограничения выходной характеристики усилителя 5 достигаются требуемые характеристики линий переключения релейного регулятора.
Рассматриваемая схема релейного регулятора позволяет расширить его функциональные возможности за счет достижения работоспособности при использовании дискретных датчиков позиционного отклонения, если оси чувствительности датчиков не совпадают с направлением базовых осей управления, относительно которых расположены исполнительные органы. Для достижения заданных характеристик на вход сумматора 6 должен подаваться сигнал, определяющий скорость изменения позиционного отклонения относительно оси управления x, y или z. Дискретные датчики позиционного отклонения не имеют выходного сигнала, характеризующего скорость изменения позиционного отклонения. Получение такого сигнала связано, как правило, либо с установкой дополнительного датчика, либо с преобразованием входных импульсов ±ω частоты fω в аналоговый сигнал, что непременно связано с внесением дополнительного запаздывания в тракт формирования сигнала скорости позиционного отклонения и значительной погрешности. Оба этих фактора могут существенно повлиять на динамические характеристики релейного регулятора и привести в конечном итоге к невозможности его использования в системе управления.
Рассмотренная схема релейного регулятора при использовании дискретных датчиков позиционного отклонения не вносит дополнительного запаздывания в тракт формирования сигнала скорости изменения позиционного отклонения и не ухудшает его точности, что расширяет функциональные возможности релейного регулятора.
Предлагаемая совокупность признаков в рассмотренных авторами решениях не встречалась и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень".
В качестве элементов для реализации релейного регулятора используются типовые схемы: реверсивный счетчик, ПКН, формирователь эталонного сигнала заданной амплитуды и, например, одновибратор, сумматор, усилитель, интегратор, релейный элемент, формирователь с задержкой на выключение.
Релейный регулятор относится к области автоматического регулирования и может быть использован в системах управления различными инерционными объектами, например поворотными платформами, промышленными роботами, летательными аппаратами в системах с дискретными датчиками позиционного отклонения, расположенными неортогонально. Целью изобретения является расширение функциональных возможностей релейного регулятора. Релейный регулятор содержит каналы управления, в каждом из которых имеется реверсивный счетчик, преобразователь код-напряжение, формирователи эталонного сигнала амплитуды Ua и длительности τo, сравнивающее устройство, сумматор, интегратор, формирователь выходного релейного сигнала с задержкой на выключение, релейный элемент, усилитель с ограничением. 2 ил.
Релейный регулятор, содержащий первый канал управления, включающий последовательно соединенные сравнивающее устройство, усилитель с ограничением, сумматор, интегратор, релейный элемент и формирователь релейного сигнала с задержкой на выключение, при этом выход интегратора соединен с инвертирующим входом сравнивающего устройства, а выход релейного элемента - с инвертирующим входом сумматора, отличающийся тем, что в него дополнительно введены второй и третий каналы управления, при этом каждый канал управления дополнительно содержит реверсивный счетчик, преобразователь код - напряжение, входы которого соединены с соответствующими выходами реверсивного счетчика, первый и второй формирователи эталонного сигнала амплитуды Uа и длительности τ0, входы которых соединены с соответствующими входами приема дискретного сигнала позиционного отклонения дискретности Δ релейного регулятора и реверсивного счетчика каждого канала управления, а выходы - с соответствующими неинвертирующими входами сумматоров всех каналов управления при коэффициентах передачи +mij и -mij, где i = 1, 2, 3 - номер канала управления, а j = 1, 2, 3 - номер входа в каждом канале, при этом выход преобразователя код - напряжение каждого канала управления подключен к неинвертирующим входам сравнивающих устройств всех каналов управления при коэффициентах передачи Kij, а параметры Uа и τ0 выбираются из соотношения U0•τ0= Δ.с

