Настоящее изобретение относится в основном к оборудованию ионной имплантации, а именно к погрузочно-разгрузочному устройству для полупроводниковых пластин для установки ионной имплантации, а конкретней - к усовершенствованному устройству сканирования и обеспечения угла наклона для установки ионной имплантации.
По мере увеличения размера полупроводниковых пластин росла потребность в существовании систем сканирования, которые способны обеспечивать пучок ионов, который падает на пластину перпендикулярно поверхности пластины во всех точках по ширине пучка, и в которых пучок простирается по всему диаметру пластины.
В то же время имеется потребность в имплантации пластины под очень разными углами имплантации и в поворачивании пластин во время имплантации, причем все это при продолжении увеличения производительности и минимизации дисперсного загрязнения.
Патент США N 5.229.615, выданный Брюну (Brune) и другим, раскрывает концевое устройство для установки ионной имплантации, содержащей механизм сканирования пластины и обеспечения угла наклона, который удовлетворяет упомянутым выше требованиям. Однако оказалось, что при некоторых условиях сканирования и наклона в системе имеется потребность в дополнительной жесткости, которую нелегко получить простым увеличением некоторых компонентов системы предшествующего уровня техники.
В системе предшествующего уровня техники, на которую делалась ссылка свыше, механизм наклона и сканирования существует в виде многоосевой рычажной системы, которая способна располагать пластину для имплантации с диапазоном угла падения пучка, который может непрерывно меняться от небольшого до значительного, поворачивать пластину вокруг оси, перпендикулярной поверхности пластины и осуществлять сканирование пластины по прямой линии, которая пересекает ось наклона пластины при любом положении наклона пластины. В этой системе движение сканирования получается при поворачивании первого рычажного элемента, который связан со вторым рычажным элементом через систему ременной передачи 2:1, причем второй рычаг связан с третьим рычагом через систему ременной передачи 1:2. (Это устройство определяет многоосевой манипулятор обычного типа, описанный в патенте США N 5.046.992). Посредством размещения зажимного устройства пластины на третьем рычаге таким образом, чтобы поверхность пластины определяла плоскость, которая содержит ось вращения первого рычага, поворот первого рычага создает линейное перемещение третьего рычага вдоль линии, которая всегда пересекает ось наклона пластины.
Настоящее изобретение соединяет наружный вал, используемый для наклона узла, с третьим рычагом посредством робастного линейного подшипникового узла, который строго противостоит вращению третьего рычага по отношению к его оси наклона и который эффективно исключает потребность в ременной передаче 1:2 между третьим и четвертым шкивами.
В соответствии с другим вариантом изобретения в конструкцию линейного подшипникового узла включается линейное кодирующее устройство, которое используется для того, чтобы обеспечить сигнал, указывающий положение пластины для системы управления дозами.
Другие цели и преимущества изобретения станут очевидными из следующего дальше описания, рассматриваемого в соединении с сопроводительными чертежами, на которых:
фиг. 1 - горизонтальная проекция концевого устройства установки ионной имплантации, включающего в себя изобретение, где одни части показаны в сечении, а другие удалены для ясности;
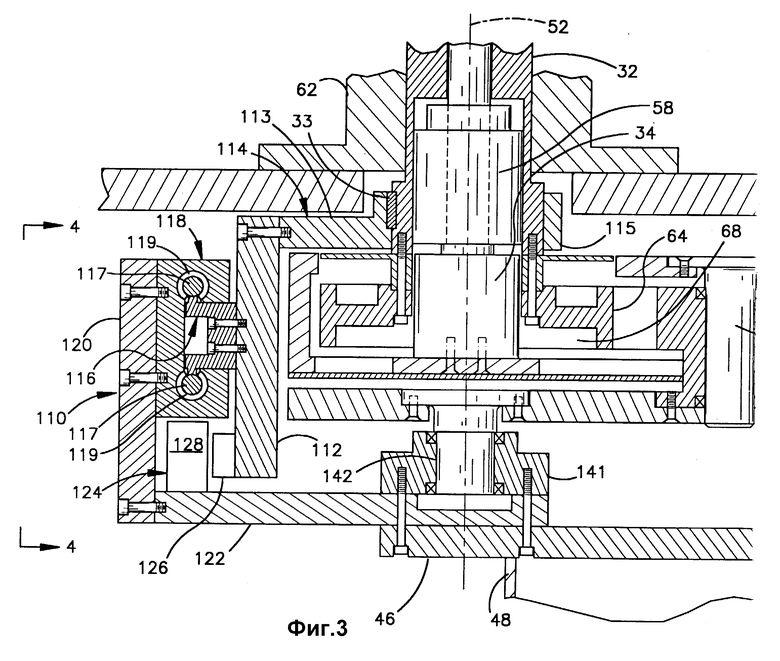
фиг. 2 - разрез устройства сканирования и наклона предшествующего уровня техники;
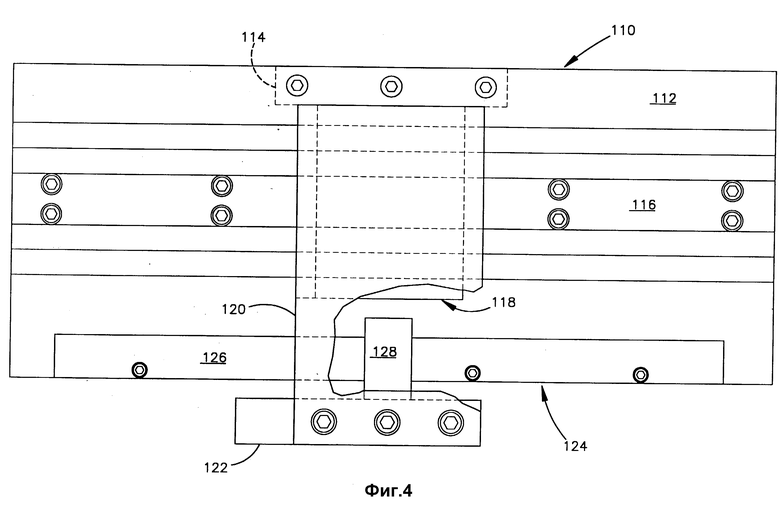
фиг. 3 - разрез устройства настоящего изобретения;
фиг. 4 - вертикальная проекция по линии 4-4 с фиг. 3.
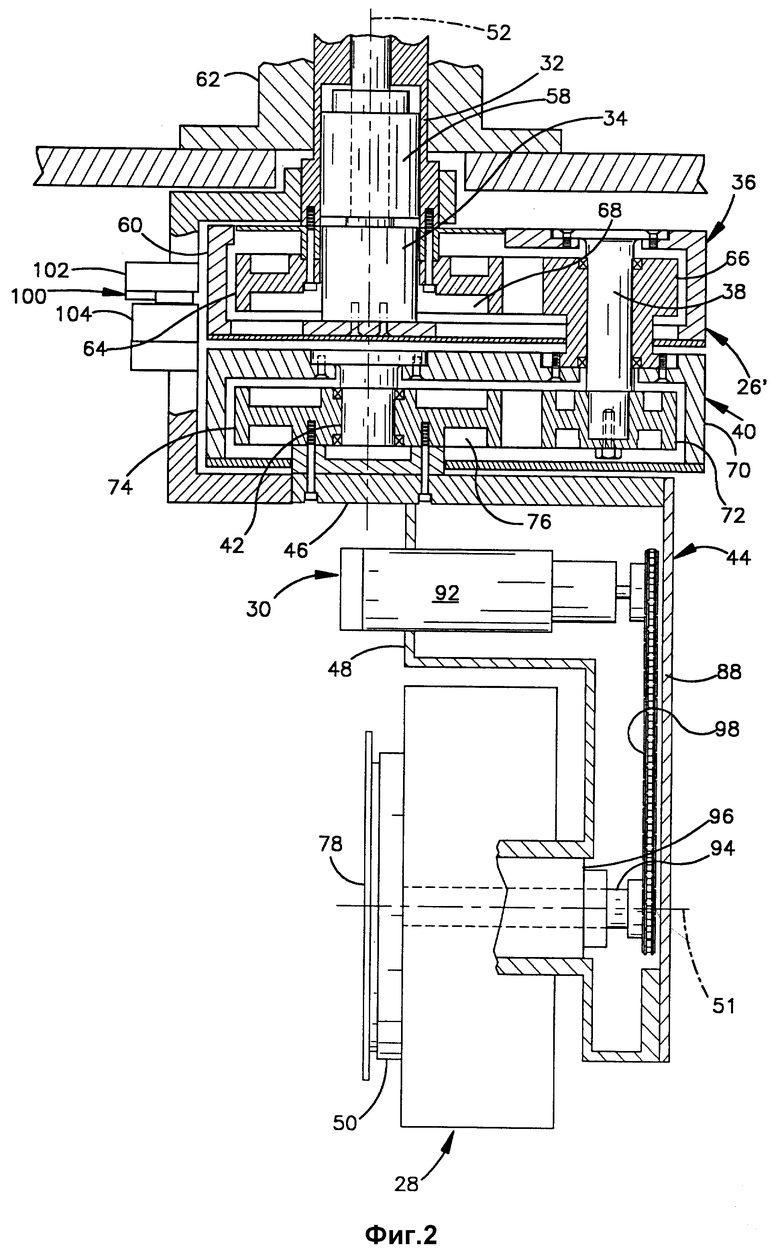
На фиг. 1 представлено концевое устройство 10 установки ионной имплантации, которое включает в себя вакуумную камеру 12, узел 14 рычага транспортировки и погрузочно-разгрузочное устройство 16 для полупроводниковых пластин, которое содержит устройство сканирования и наклона согласно настоящему изобретению.
Узел 14 рычага транспортировки не является частью настоящего изобретения и не описывается здесь подробно, а может быть такого типа, который описан в патентe США N 5.229.615, на который делается ссылка выше. Узел состоит из пары кольцеобразных образных элементов 18 для приема пластин, принимаемых на рычаге 20, установленном для перемещения в направлениях Q и Z на опорном узле 22, который выступает в вакуумную камеру. В положении сплошной линии согласно фиг. 1 рычаг 20 находится в неактивном положении, таком, какое бывает во время имплантации пластины. Когда пластина должна транспортироваться от устройства загрузки или подобного ему в удлиненную часть вакуумной камеры 12, рычаг поворачивается в положение пунктирной линии и перемещается по оси Z, как требуется для помещения пластины на погрузочно-разгрузочное устройство для полупроводниковых пластин 16 для имплантации.
Погрузочно-разгрузочное устройство 16 для полупроводниковых пластин содержит узел сканирования и наклона 26, узел приемного стола 28 для полупроводниковых пластин, установленный на узле сканирования и наклона, и приводную систему вращения 30, установленную на узле сканирования и наклона и способную работать, вращая стол вокруг его оси.
Для обеспечения полного понимания настоящего изобретения на фиг. 2 подробно показан узел сканирования и наклона предшествующего уровня техники, обозначенный 26'. Узел 26' содержит полый наружный вал 32, внутренний вал 34, поддерживаемый для вращения в наружном валу, первый рычажный узел 36, прикрепленный к внутреннему валу, первая ось 38, прикрепленная к наружному концу первого рычага, второй рычажный узел 40, установленный для вращения вокруг оси 38, вторая ось 42, прикрепленная к наружному концу второго рычага 40, и третий рычаг 44, установленный для вращения вокруг второй оси.
Третий рычаг 44 содержит пластину 46, кожух 48, прикрепленный к пластине 46, узел стола 28, установленный для вращения на кожухе 48, стол 50, установленный на узле стола, и приводную систему 30, установленную на кожухе и способную работать, вращая узeл стола 28 вокруг оси 51, перпендикулярной оси 52 внутреннего 34 и наружного 32 валов. Ось 52 также перпендикулярна осевой линии ионного пучка и находится в продленной плоскости грани пластины. Таким образом, плоскость грани пластины всегда пересекает одну и ту же точку на осевой линии ионного пучка для всех сочетаний сканирования, наклона и вращения пластины.
На фиг. 1 приводная система погрузочно-разгрузочного устройства для полупроводниковых пластин способна вращать весь узел 26 сканирования и наклона вокруг оси 52 и перемещать узел стола 28 линейно в любом угловом положении узла сканирования и наклона. На фиг. 2 внутренний вал 34 приводится в движение первым серводвигателем 54 через систему гармонической понижающей передачи 56. Вал 34 проходит через узел магнитожидкостного уплотнения 58 и крепится к кожуху 60, который защищает первый рычажный узел 36. Наружный вал 32 проходит через магнитожидкостное уплотнение 62 и крепится к первому шкиву 64. Второй шкив 66 установлен для вращения первой оси 38, которая крепится к кожуху 60. Первый и второй шкивы связаны лентой из нержавеющей стали 68, которая прикреплена к обоим шкивам.
Второй шкив 66 прикреплен к кожуху 70, который вмещает второй рычаг 40, в то время как первая ось 38 прикреплена к третьему шкиву 72 во втором рычаге. Четвертый шкив 74 прикреплен к третьему рычагу 44 погрузочно-разгрузочного устройства для полупроводниковой пластины и установлен для вращения на второй оси 42, которая прикреплена к кожуху 70. Третий и четвертый шкивы связаны лентой 76 из нержавеющей стали, прикрепленной к обоим шкивам. Вращение внутреннего вала 34 серводвигателя 54 вызывает линейное перемещение третьего рычага 44 и тем самым линейное сканирующее движение пластины 78, принимаемой на столик 50, вдоль линии, перпендикулярной оси 52. Лента 76 приводит в движение третий рычаг при точном противоположном вращении к рычагу 40, что приводит к отсутствию изменения угла наклона при положении сканирования.
Наружный вал 32 приводится в движение вторым серводвигателем 80 через систему гармонической понижающей передачи 82 и систему цепного привода 84, которая приводит в движение звездочку, прикрепленную к кожуху 86, который поддерживает первый серводвигатель 54 и понижающую передачу 56. Когда наружный вал 32 приводится в действие вторым двигателем, внутренний вал тоже вращается; следовательно, весь узел 26 сканирования и наклона вращается вокруг оси 52 без изменений относительно положений среди первого, второго и третьего рычагов.
Третий рычаг содержит кожух 48, пластину 46 и крышку 88, прикрепленные на кожухе, и узел стола 28, также установленный на кожухе. Привод вращения 30 содержит двигатель 92, установленный на кожухе 48, вал 94 привода стола, прикрепленный к столу 50 и установленный для вращения в узле 96 магнитожидкостного уплотнения, помещенном между валом и кожухом, и систему цепного привода 98, связывающую вал 94 привод и выходной вал 92 двигателя.
В соответствии с другим вариантом конструкции предшествующего уровня техники, на погрузочно-разгрузочном устройстве для полупроводниковых пластин установлено линейное кодирующее устройство 100 для обеспечения сигнала, пропорционального положению пластины относительно базовой линии в направлении механического сканирования. Эта система содержит элемент 102 масштабной линейки, прикрепленный к наружному валу 32 погрузочно-разгрузочного устройства для полупроводниковых пластин, и датчик 104, прикрепленный к третьему рычагу 44 и способный перемешаться вдоль масштабной линейки. Линейное кодирующее устройство 100 используется в системе управления дозами, в которой двигатель сканирования управляется регулятором доз (не показан), который принимает входные сигналы от линейного кодирующего устройства 100, от дозиметра 106 (фиг. 1), который находится впереди пластины и по соседству с ее краем, и от устройства кодирования вращения (не показано), прикрепленного к серводвигателю 80.
Во время имплантации параллельный ленточный пучок 108 порождается на одной оси (не показанными средствами) и на двигатель 54 сканирования подается питание для обеспечения сканирования пластины по ортогональной оси. Если процесс имплантации, который выполняется, этого требует, пластина 78 может поворачиваться вокруг оси, перпендикулярной к ее поверхности, приводной системой вращения 30.
Настоящее изобретение подробно показано на фиг. 3 и 4, на которых можно видеть, что сохранены многие их элементов конструкции предшествующего уровня техники. Узел 26 сканирования и наклона содержит полый наружный вал 32, внутренний вал 34, поддерживаемый для вращения в наружном валу, первый рычаг 36, прикрепленный к внутреннему валу, первую ось 38, прикрепленную к наружному концу первого рычага, второй рычаг 140, установленный для вращения вокруг оси 38, вторую ось 142, прикрепленную к наружному концу второго рычага 140, и третий рычаг 44, установленный для вращения вокруг второй оси.
Третий рычаг 44 по существу не отличается от конструкции по фиг. 2, включая в себя пластину 46, кожух 48, узел стола 28 и приводную систему 30 стола.
На фиг. 3 и 4 вал 34 проходит через узел 58 магнитожидкостного уплотнения и крепится к кожуху 60, который защищает первый рычаг 36. Наружный вал 32 проходит через магнитожидкостное уплотнение 62 и крепится к первому шкиву 64. Второй шкив 66 установлен для вращения на первой оси 38, которая прикреплена к кожуху 60, а первый и второй шкивы связаны из нержавеющей стали 68, причем все из упомянутой выше конструкции не изменено по сравнению с конструкцией по фиг. 2. В настоящей конструкции второй шкив 66 прикреплен ко второму рычагу 140, а втулка 141, к которой крепится третий рычаг 44, установлена для вращения на второй оси 142.
В соответствии с изобретением линейное перемещение третьего рычага 44 для осуществления механического сканирования при работе двигателя сканирования 54 осуществляется строго противоположным вращением третьего рычага по отношению к валу 32 посредством средства 110 линейной направляющей. Средство 110 содержит опорную плиту 112, узел зажима 114, привинченный болтами к опорной плите и зафиксированный на валу 32, узел 116 направляющей, закрепленный болтами на опорной плите, узел 118 скользящей каретки, способный перемещаться по направляющей, крепежную пластину 120, привинченную болтами к узлу скользящей каретки, и монтажный рычаг 122, привинченный болтами к пластине 120 и к втулке 141. Узел зажима содержит зажимной элемент 113, который удерживается в фиксированном угловом положении по отношению к валу 32 посредством шпонки 33 и прижимается к валу колпачковым элементом 115, привинчиваемым туда болтами (не показано).
Узел направляющей 116 и узел скользящей каретки 118 могут быть "двухваловой направляющей системой" DSR модели Томсона, в которой узел направляющей содержит пару параллельных направляющих валов 117, и узел скользящей каретки содержит опоры подшипников 119, содержащих шариковыe подшипники. Такие блоки имеются в продаже, производятся корпорацией Thomson Industries Inc. и не будут здесь подробно описываться.
Работа двигателя сканирования 54 приводит к вращению первого рычага 36 и через шкивы 64, 66 и ленту 68 к вращению второго рычага 140 относительно него; однако лента и шкивы в сочетании со средством линейной направляющей 110 работают для ограничения движения третьего рычага 44 и прикрепленного узла стола 28 до прямой линии, перпендикулярной оси 52, и в бумагу и из нее, как видно из фиг. 1 и 3.
Как описано выше, когда приводится в действие двигатель наклона 80, внутренний 34 и наружный 32 валы поворачиваются в унисон, вызывая вращение всего устройства 26 сканирования и наклона вокруг оси 52 для наклона пластины 78 относительно ионного пучка 108, как подробно описано в патенте США N 5.229.615; однако, как также описано в патенте, движение сканирования, которому подчиняется пластина 78, всегда происходит по прямой линии, пересекающей ось 52 при любом положении наклона.
В соответствии с изобретением линейное кодирующее устройство 124, используемое в системе управления, как описано в упомянутом выше патенте, также устанавливается на средство линейной направляющей 110. На фиг. 3 и 4 кодирующее устройство содержит продолговатый элемент масштабной линейки 126, прикрепленный к опорной плите 112, и датчик 128, прикрепленный к монтажному рычагу 122. Как и в конструкции предшествующего уровня техники согласно фиг. 2, кодирующее устройство обеспечивает прямое считывание положения пластины в направлении механического сканирования.
Использование: оборудование ионной имплантации. Техническим результатом изобретения является исключение потребности в ременной передаче в механизме сканирования пластин. Сущность изобретения: погрузочно-разгрузочное устройство для полупроводниковых пластин для установки ионной имплантации содержит стол 28 с поверхностью для приема пластины, узел сканирования и наклона 26, способный работать, вращая стол 28 вокруг оси 52, параллельной плоскости, определенной поверхностью пластины 78, принимаемой столом 28 и способной работать, перемещая стол 28 в направлении сканирования вдоль прямой линии перпендикулярно названной оси. Узел сканирования и наклона содержит первый рычаг, способный вращаться вокруг названной оси, второй рычаг, установленный на первом рычаге для относительного вращения вместе с ним, третий рычаг, установленный на втором рычаге для относительного вращения вместе с ним, причем стол 28 установлен на третьем рычаге. Устройство также содержит первое приводное средство (34, 54, 56), выполненное с возможностью работать, вращая первый рычаг вокруг оси 52, средства, взаимно связанные с первым, вторым и третьим рычагами, выполненные с возможностью работать, перемещая стол 28 в направлении сканирования, второе приводное средство, выполненное с возможностью вращать первый, второй и третий рычаги как один блок вокруг оси 52, и средство 110, выполненное взаимно соединяющим второе приводное средство и третий рычаг для сохранения вращательного положения третьего рычага. При этом средство, взаимно соединяющее второе приводное средство и третий рычаг, содержит линейное подшипниковое средство, имеющее первый узел направляющей, содержащий пару продолговатых направляющих, установленных в фиксированном положении по отношению к второму приводному средству, и узел скользящей каретки, содержащий опору подшипника, выполненную с возможностью зацепления с направляющими, установленными в фиксированном положении по отношению к третьему рычагу. 2 з.п.п. ф-лы, 4 ил.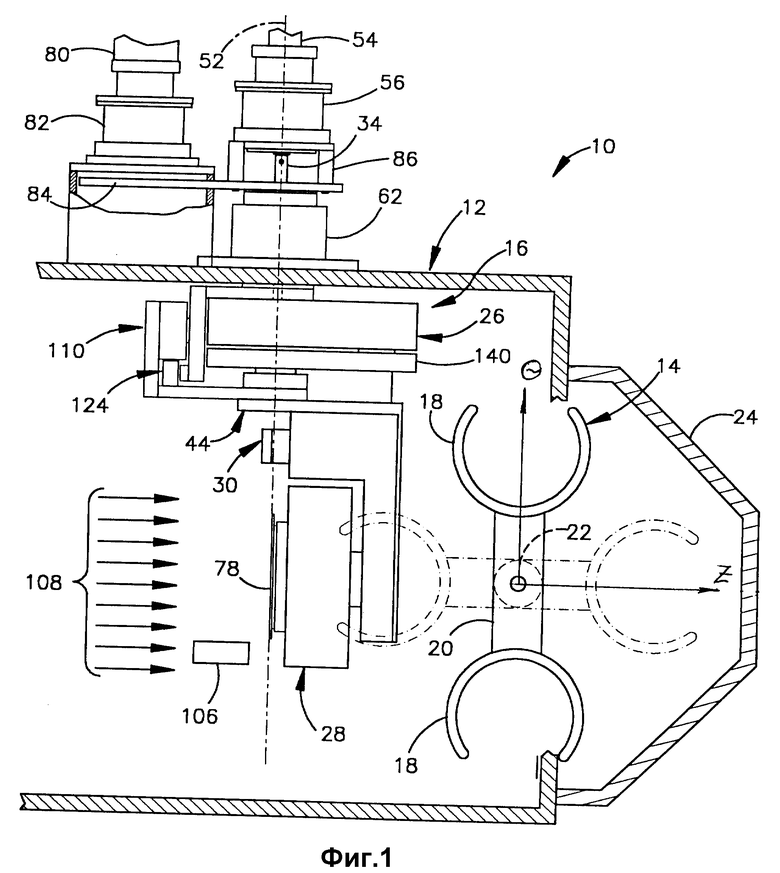
| US 5229615 A, 1993 | |||
| US 5091655 A, 1992 | |||
| US 5003183 A, 1991 | |||
| Способ бесконтактной магнитной ориентации деталей | 1973 |
|
SU458422A2 |
| 0 |
|
SU236072A1 | |
| УСТРОЙСТВО Для ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 0 |
|
SU246117A1 |
| DE 3709093 A1, 1987 | |||
| Устройство для подачи плоских изделий | 1989 |
|
SU1653203A1 |
