можностью взаимодействия с карегкои 11, Каретка 1 выполнена с упором 24, ограничивающим перемещение Г образных пластин 16, 17, к коромыс- лок 26, установленным шарнирно за крайний из трех линейно расположен - ны на нем пальцев. На рычаге 9 вы™
-
16532034
полнены направляющие 30 и два упора, взаимодействующих со средним пальцем коромысла 26, другой крайний палец коромысла 26 взаимодейст вуег с дополнительными выступами 2 и 21 Г-образных пластин 16 и 17, 7 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1331638A1 |
| Устройство для сборки контактных групп | 1981 |
|
SU991629A1 |
| УСТРОЙСТВО для НАНЕСЕНИЯ ПЕЧАТНОГО ОТТИСКА НА СТЕКЛОИЗДЕЛИЯ | 1970 |
|
SU272099A1 |
| Автоматизированный шпулярник для сновальных машин | 1985 |
|
SU1266905A2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1972 |
|
SU353371A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Автоматизированный шпулярник для сновальных машин | 1983 |
|
SU1089185A1 |
| Устройство для разделки и укладки рыбы в банки | 1973 |
|
SU477712A1 |
| Устройство для смены кассет | 1973 |
|
SU491968A1 |
| Грейферное устройство для подачи заготовок в пресс | 1987 |
|
SU1454551A1 |

..обрсте ле г тс i подг1ву из;°т1п миьроэ екгро шеи 5,87. I I1 Т Jti -v 1 lei С i O v 004-1 ( f riiv г tH J ЗО1 - тХ (. ic fi к 1 С ТОССбсл МЗГ IGTu 1НН Ч i i с1 ле т Li , i3o6perti i-q - п .и Q с- вт об абчтывдем) v штелии - lu -LI GiCT та c4Gi о ГО; то ме ч icpei рузки Ti з i.e т и-- 3 BLIHO u ицс рь1 sai а 9 с пглвот . о ic то i i, -чагч i i 1 s S - а п 1 г ,j пяю-Lix р iqar° 9 5 захват а до i ц , i nOTheHtlOrO В Я ;С . о TiTHj c гопла елг1 из r -oos a-. jit x С, 1/ с jb civna и 18, 21, стаьоБтеьи гч с вочТР W-J 7/ а f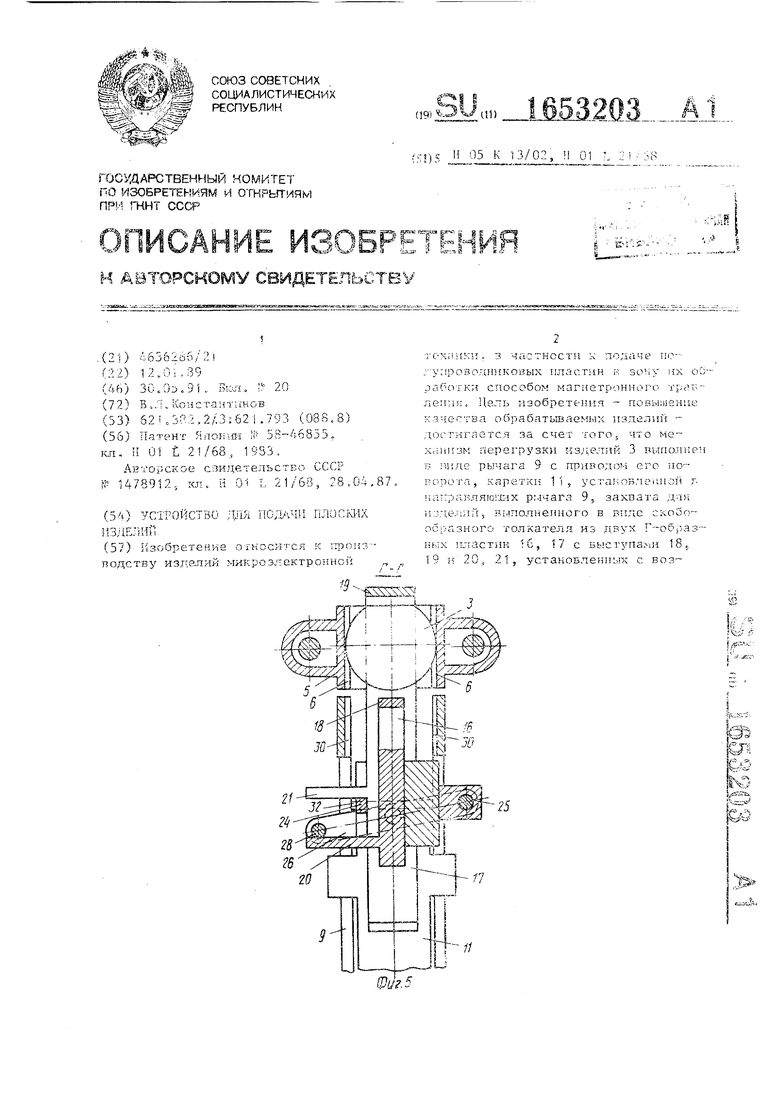
Изобретение относится к производству изделий микроэлектронной техники, в частности к подаче полупро водникових пластин в зону их обработки способом магнетронного травления „
Целью изобретения является повышение качества обрабатываемых ч делий
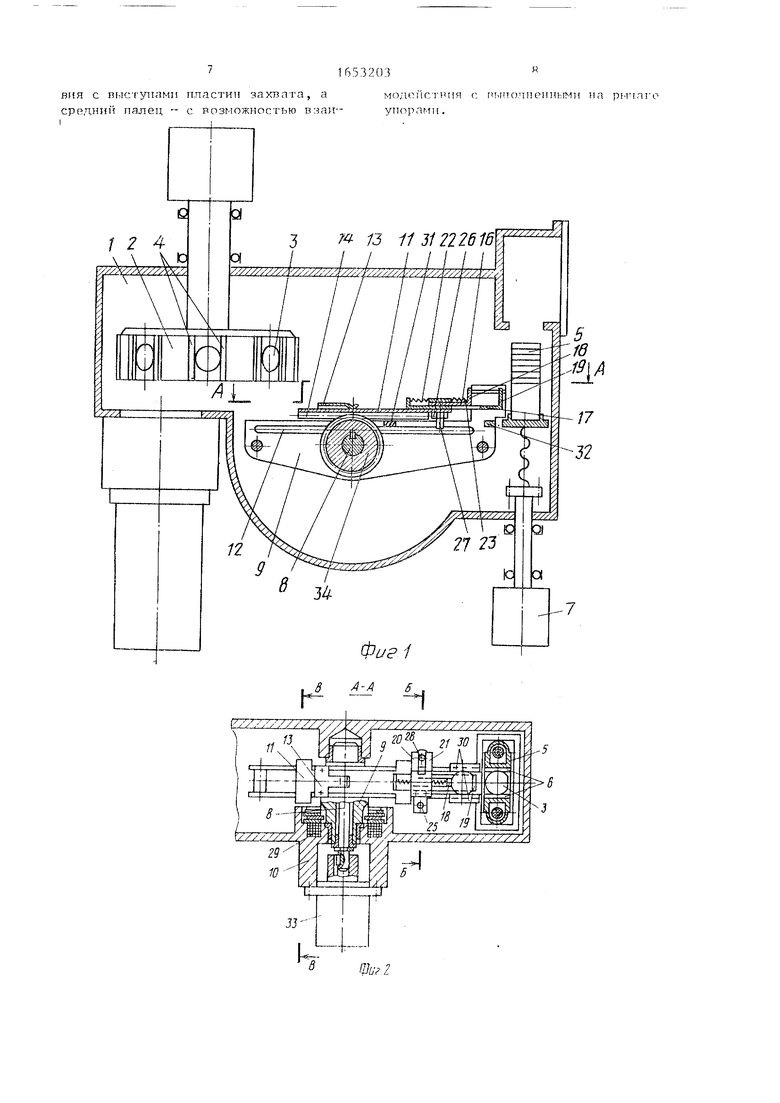
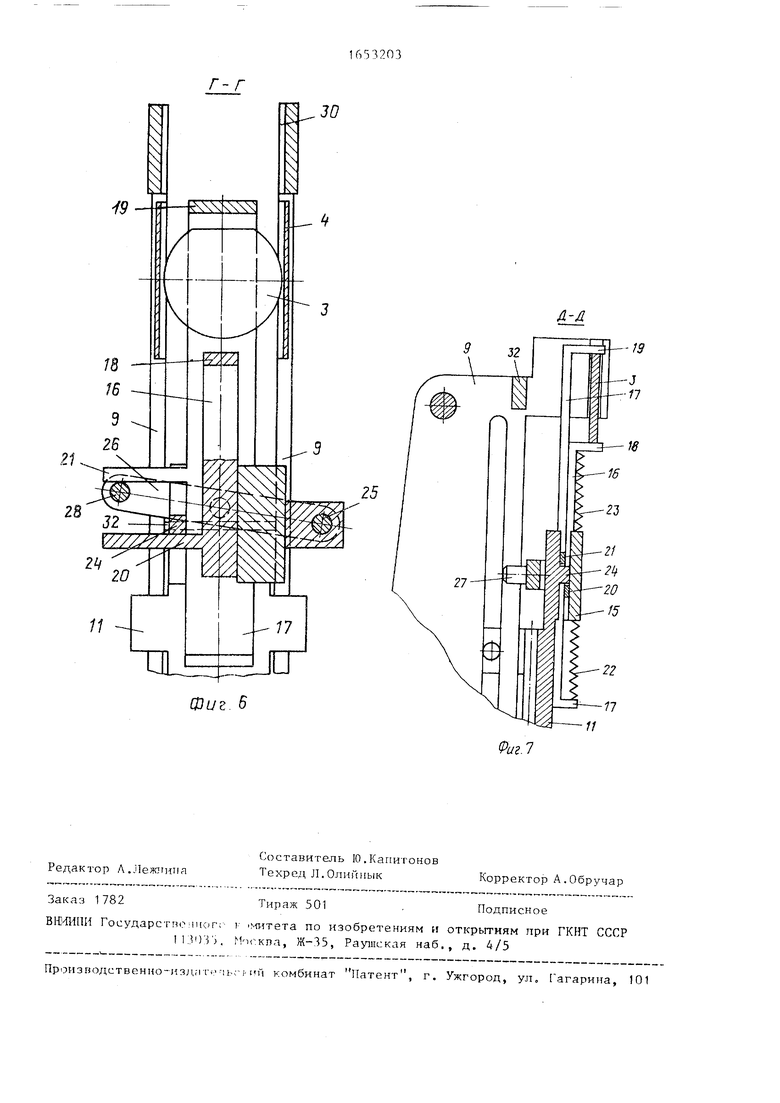
Па фиг, 1 изображено предлагаемое свойство, общий вид; на фиг.2 :. счение на фиг- 1; на фиг1, 3 - сучение и В-В н-а фиг. 2; на Лиг. 4 - сечение Г-Г на фиг. 3 (той исходном положении каретки); на Лиг. 5 - то же, при крайнем правом положении каретки; на фиг. 6 го же, при крайнем левом положении каретки; на фиг. 7 - разрез П-Д на riui г, L,
Устройство для подачи плоских изделий состоит из вакуумной камеры I держателя 2 обрабатываемых пластин 3 с упругими Ликсаторами 4, кассеты 5 с пластинами 3 и направляющими 6 для них, приводом 7 пошагового перемещения кассеты 5 и механизма перегрузки пластин из кассеты 5 на держатель 2, включающего установленный на валу 8 рычаг 9 в неподвижной опоре вращения, расположенный в корпусе 10, и каретку 11, установленную в направляющих 12 рычага 9. Каретка 11 снабжена фрикционым тормозом 13, рейкой 14, направляющей 15 и захватом, выполненным в виде двух Г-образных пластин 16 и 17 с выступами 18, 19 и 20, 21, установленных в направляющих 15 и соединенных с кареткой посредством пружин 22 и 23. Кроме гого каретка 11 снабжена упором 24, ограничиваю- перемещение Г-образных пляглин 16 и 17, и опорой вращения, в кото-тую шарнирно установлен палец 23 ко помысла 26, В коромысле также вытюлне ы папьцы 27 и 28, линейно расположенные с пальцем 25. Рычаг 9 соединен с опорой вращения через электромагнитную муфту 29 и имеет направляющие 30 для пластин 3 и два упора 31 и 32, взаимодействующие я крайних положениях каретки 11 со средним пальцем 27 коромысла 26.
Выступы 20 и 21 пластин 16 и 17 взаимодействуют с крайним пальцем 28 коромысла 26. Вал 8 соединен с приводом 33 и имеетприводную шестерню 34, взаимодействующую с рейкой 14
каретки 11.
Устройство работает следующим образом.
Jin я радиального перемещения каретки 11 одновременно включаются электромагнитная муфта 29 и привод 33, при этом рычаг 9 фиксируется на корпусе 10, а каретка 11 под действием приводной шестерни 34, взаимодействующей с рейкой 14 каретки 11, перемещается по направляющим 12 рычага 9, преодолевая усилие фрикционного тормоза 13, при этом Г-образ ные пластины 16 и 17 перемещаются
вместе с кареткой 11. При перемещении каретки 11 в крайнее левое положение в конце ее хода палец 27 ко- ромысля 26 упирается в упор 31 рычага 93 поворачивая коромысло 26 вокРуг пальца 26 по часовой стрелке, при этом палец 28 коромысла 26 перемещает пластину 17 за выступ 21 по направляющим 15 вправо, т.е. в сторону, противоположную перемещению каретки 1I, сжимая пружину 22, а упор 24 каретки 11 перемещает пластину 16 за выступ 20 влево по направлению перемещения каретки 11 (фиг. 6), При перемещении каретки 11 в крайнее правое положение в конце ее хода палец 27 коромысла 26 упирается в упор 32 рычага 9, поворачивая коромысло 26 вокруг пальца 25 против часовой счрелки, при этом палец 28 коромысла
26 перемещае пластину 16 за выступ 2 по направляюпшм 15 влево, г.е. в сторону, противоположную перемещению ка- рсгки 11, сжимая пружину 23, а упор | 24 каретки 11 перемешает пластину 17 vi выступ 21 вправо по направлению перемещения каретки 11 (фиг. 5), Таким образом, в конце хода каретки 11 вправо или влево расстояние между
i-ыступами 8 и 19 пластин 16 и 17 увеличивается, образуя равные зазоры между обрабатываемой пластиной 3 и выступами 18 и 19, после чего обра- б ыь vv.- пластина 3 может свободно, не соприкасаясь с выступами 18 и 19, уотгнавл -ч the,-, или сниматься с мсха- ннгмг пср грузгь чластин. При движении к.р 1г:;г , i из крайних положений (npi.no о чли левого; в начале ее хода 16 и 17 под деист- F tOaV чр,,,;:; 12 и 23 сходятся, фиксируя между выступами 20 и 21 обрабатываемую чластину 3, причем срез плас.чны 3 ориентируется вдоль вые- гуна 19 плаетччы 7 (гоиг. 4).
Дтя краща-i слытого движения рычага
33 (
(,элек29 выключена) , под действием
9 Pf лючае : с голько привод тромггнлтд ая при Злом каретка 11 фрнкцло чюго тормоза 1 остается не- поцвилснол относительно рычага 9, а 1трнводная пес терпя 34, взаимодекст- зуя с рейкой 14 каретки 11, неподвижной в ратиолъном направлении, поворачивает тзычаг 9,
При загрузке пластинами 3 держателя 2 включаются электромагнитная муфга 29 и привод 33 (вращение по часовой стрелке)3 при этом каретка 11 с исходного положения (фиг. 1) перемещается в крайнее правое положение и пластина 17 ходит под нижнюю пластину 3 в кассете 5. В конца хода каретки 11 пластины 16 и 17 расходятся, после чего привод 33 отключается а кассета 5 приводом 7 опускается на один шаг и пластина 3 оказывается между выступами 18 и 19. Далее опять включается привод 33 (против часовой отрепки) и каретка 11 перемещается влево до исходного положения. При этом в начале хода каре тки 11 пластика 3 фиксируется между выступами 18 19, ориентируясь срезом вдоль выступа 19 пластины 17, при дальнейшем ходе каретки 11 пластина 3 выступом 19 перемещается из направ- ляюггпх 6 кассеты в направляющие 30
рычага 9. Затем элекгромя гнигная муфта 29 выключается, а рычаг 9 под действием привода 33 поворачивается против часовой стрелки на 90°. В этом положении ноял включается муфта 29 (привод 33 ociiei- ся включенным, ярапаясь прошв часовой стрелки) и KaoeiKd 11 перемещется из исходного положения в крайнее нижнее положение, передвигая выступом 19 пластину 3 и направляющих 30 рычага 9 в упругие фиксаторы 4 держателя 2. В конце хода каретки 11 при достижении ею крайнего н ижнего положения пластины 16 и 17 расходится, освобождая пластин 3, муфта 29 выключается, а привоц 33 переключается на вращение по часовой стрелке, и рычаг 9 под действием привода 33 поворачивается по часовой стрелке в исходное положение, оставляя пластину в упругих фиксаторах 4 держателя
7
Перегрузка пластин 3 г держателя 2 и кассету 5 осуществлле ся в обратной последовательное ги.
Фор
у л а из
б п
о н и я
5
0
5
0
5
Устройство для подачи плоских изделий, содержащее вакуумную камеру, расположенные в вакуумной камере держатель с фикса тор лм.-t, кассету, механизм перегрузки изделий, выполненный в виде рычага с направляющими, кареткой с фрикционным тормозом, установленной в направляющих рычага, захватом и приводом с валом поворота рычага, причем захват размещен на каретке и выполнен в виде скобообразного толкателя чз двух Г-образных пластин, о т л н ч а - ю щ е е с я тем, что, с цечью повышения качества, каретка снабжена опорой вращения, в каретке выполнены направляющая, упор для перемещения Г-образных пластин захвата, выполненных с выступами, размещенными с возможностью взаимодействия с упором и соединенных с кареткой посредством пружин, коромысло с гремя линейно расположенными пальцами, палец одного из концов коромысла размещен в опоре вращения каретки палец другого конца коромысла выполнен с возможностью взпнмолейс
вия с выегунами ппастин захвата, а средний пялец - с возможностью вчаи1 2 4 УМ
3 w 13 1131222616
I II/
.8 А-А 6 .
п
/J
8 -
$
29
10
ч
моденсп ич г пы кгтненнмми на рьгпго упорами.
Фиг1
Ж
,Д г/да
/ j-
3В
V/ а
в
3
-I
f
о
Гч
ГП
чО
g
2
A KX////7/Z
I
ir
S S
N
11
Фиг 6
Редактор А.Лежлнпа
Составитель 10. Капитонов Техред Л.Олийнык
Заказ 1782
Тираж 501
ВНИИПИ Государство тог. i митета по изобретениям и открытиям при ГКНТ СССР НОУ. М к-кла, Ж-35, Раушская наб., д. 4/5
Произг)одственно-изд;| c. -ibri-ий комбинат Патент, г. Ужгород, ул. Гагарина, 101
Корректор А.Обручар
Подписное
| r vi я, , кл, П и t 21/68, HSi АР ое сзицр ельс т ьСС1 Г 14789Р, j | |||
| i 0 / 1/ 63, 28 U П О Сл-ЮКС - С Тил , 1И niKrJU Hj IE ЛТн |
