Устройство относится к горной электромеханике, а именно к устройствам регулирования крутящего момента приводного двигателя для ограничения динамических нагрузок в механизмах горных машин с нерегулируемыми по скорости приводами. К ним можно отнести: механизмы добычных и проходческих комбайнов, комплексов, щитов, бурильных установок, роторных экскаваторов и т.п., т.е. машин, рабочие органы которых взаимодействуют с забоем. Характерными режимами их работы являются: пуск вхолостую, работа с переменной (случайной) нагрузкой и перегрузками с частичной или полной остановкой.
Высокая жесткость механических характеристик приводных двигателей приводит к большим динамическим нагрузкам при пуске, работе с переменной нагрузкой и особенно при стопорении (перегрузке). Перегрузки возникают в элементах кинематических цепей машин и механизмов, а также на их рабочих органах. Поэтому ограничение динамических нагрузок в этих режимах регулированием крутящего момента двигателя является важной задачей.
Характерным для рассматриваемых механизмов является наличие сухого или граничного трения в кинематических парах. Известно, что при этом силы трения покоя всегда больше, чем силы трения при движении [Теория автоматизированного электропривода. Учебное пособие для вузов. /Чиликин М.Г., Ключев В.И., Сандлер А. С.- М.: Энергия, 1979, с. 13.] Кроме того, они возрастают с продолжительностью неподвижного контакта [Крагельский И. В., Гитис Н.В. Фрикционные автоколебания. - М.: Наука, 1987. с. 75 - 79.]
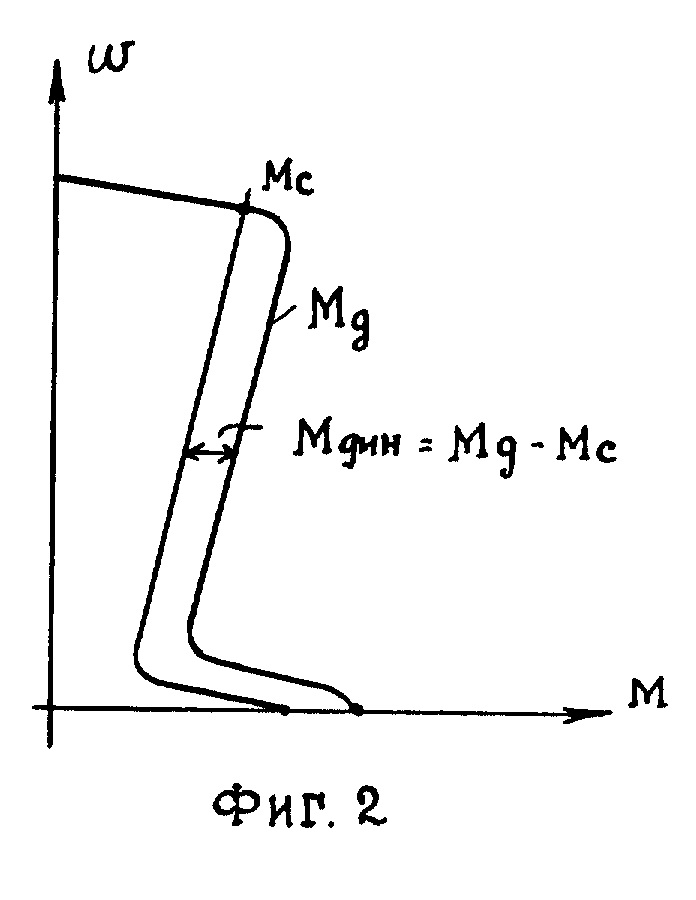
Движение возможно, если момент двигателя больше момента сил сопротивлений. Поэтому в механизмах с сухим или граничным трением после трогания разность момента двигателя и момента сил сопротивлений оказывается большой (фиг. 1), что и определяет величину динамических нагрузок. Для снижения динамических нагрузок необходимо, чтобы механическая характеристика двигателя при пуске имела вид, изображенный на фиг.2. В этом случае будет обеспечиваться минимальная динамическая нагруженность.
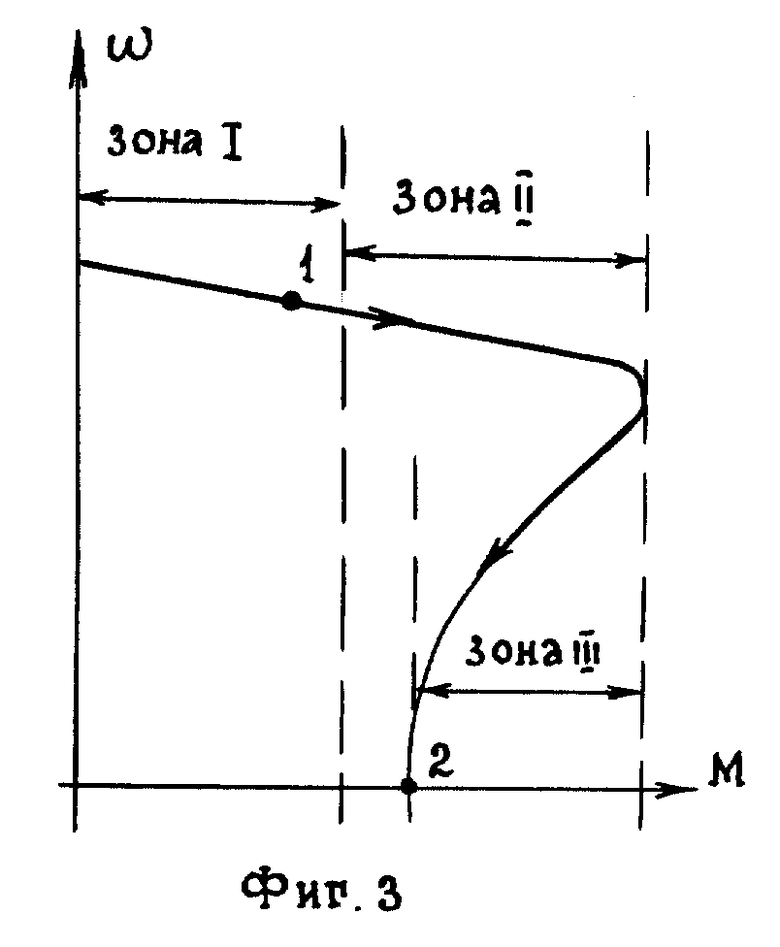
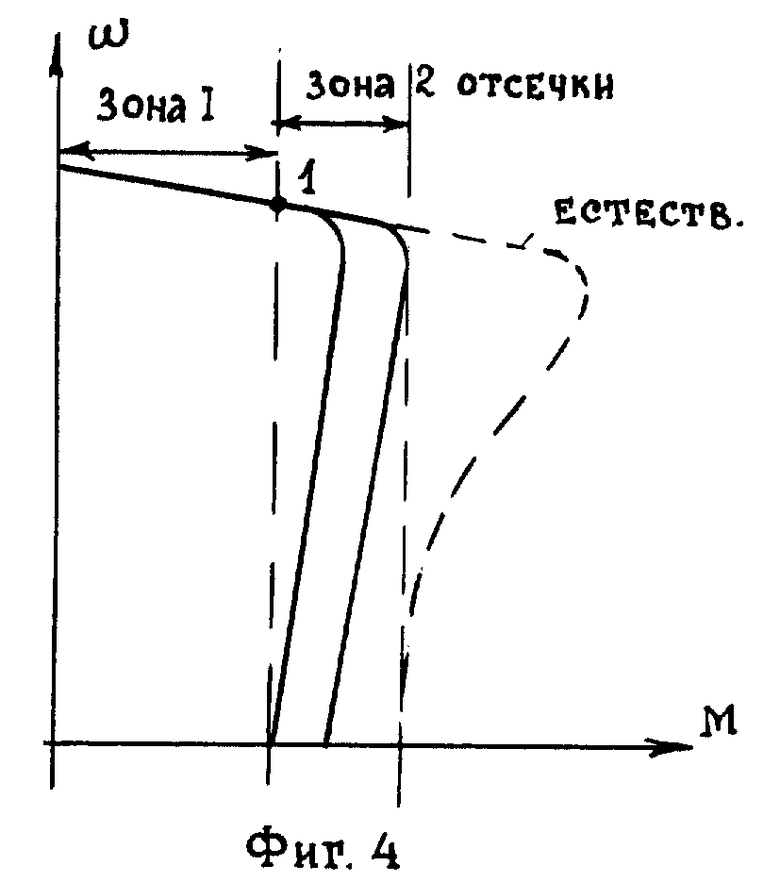
При возникновении перегрузок в процессе работы происходит переход из рабочей зоны I (фиг.3) в зону перегрузки II либо в зону "опрокидывания" III двигателя, что также определяет большую динамическую нагруженность в кинематических цепях машин и механизмов. Желаемая механическая характеристика при этом должна иметь вид, изображенный на фиг. 4.
Учитывая специфику горного производства, а также то, что регулирование скорости в рассматриваемых механизмах не предусматривается, необходимо формировать желаемые механические характеристики двигателя простыми средствами.
В настоящее время для плавного пуска и ограничения динамических нагрузок применяют гидро- и электромагнитные муфты. Недостатком этих устройств является низкая надежность, большие эксплуатационные расходы, невозможность обеспечения желаемых механических характеристик (фиг. 2,4) и, следовательно, минимальной динамической нагруженности в элементах кинематических цепей.
Известны устройства автоматического регулирования [Теория автоматизированного электропривода. Учебное пособие для вузов. / Чиликин М.Г.. Ключев В. И., Сандлер А.С.- М.: Энергия, 1979. с.405, 415], включающие дроссели насыщения, магнитные усилители, тиристорные регуляторы, которые позволяют регулировать скорость двигателя, формировать величину крутящего момента двигателя при пуске. Однако в рассматриваемых механизмах, где отсутствует необходимость регулирования скорости, функции этих устройств оказываются избыточными. Отсюда их сложность, высокая стоимость, особенно для двигателей большой мощности.
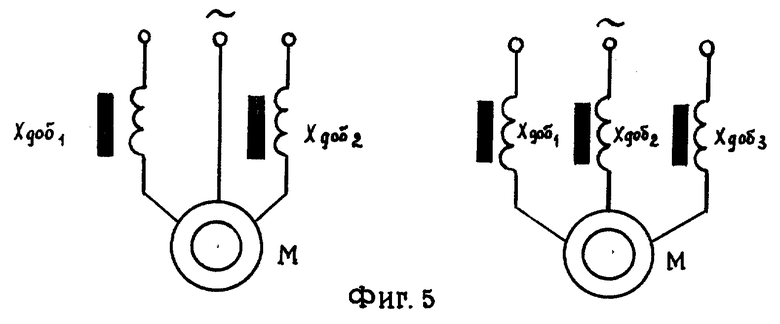
Известен также трехфазный дроссель, взятый в качестве прототипа, состоящий из катушек с сердечниками, включаемых последовательно в две или три фазы статора асинхронного двигателя на время пуска для ограничения тока и момента двигателя (фиг. 5) [Сиротин А.А. Автоматическое управление электроприводами. - М. : Энергия, 1969, изд. 2-е, перераб. и допол., с. 47-150 ]. Недостатком его является невозможность формирования желаемых механических характеристик двигателей механизмов с сухим или граничным трением. Кроме того, его нельзя использовать при работе механизма под нагрузкой, так как падение напряжения на катушках оказывается большим. Поэтому устройство отключают после пуска.
Технический результат для предлагаемого устройства заключается в снижении динамической нагруженности в элементах кинематической цепи механизмов с сухим или граничным трением и увеличении ресурса горной машины за счет формирования желаемой механической характеристики приводного двигателя.
Он достигается тем, что известное устройство, состоящее из катушек с сердечниками, включенных последовательно с обмотками статора приводного двигателя механизма, дополнительно содержит корпус, установленный на стойках, прикрепленных к основанию устройства с возможностью изменения угла наклона корпуса, в который помещены катушки с сердечниками, соединенными немагнитной связью, выполненными с возможностью перемещения в немагнитной направляющей и внедрения в катушки до ограничителей хода сердечников, установленных на торцах корпуса. Кроме того, сердечники соединены немагнитной связью жестко, а корпус устройства выполнен из магнитопроводящего материала, разборным из двух половин.
При использовании приводного двигателя постоянного тока между устройством и якорем приводного двигателя включен неуправляемый выпрямитель.
Наличие новых (дополнительных) конструктивных признаков и связей между ними подтверждает соответствие технического решения критерию "новизна".
Формирование желаемых механических характеристик осуществляется использованием механической инерции движения сердечников устройства для создания первоначального броска момента двигателя, необходимого для преодоления повышенной величины сухого или граничного трения, а также использованием свойств изменения индуктивности катушек устройства при движении сердечников. Кроме того, желаемый характер и направление движения сердечника определяется величиной тока статора двигателя. Так, если ток больше номинального, сердечники начинают движение и входят в катушки (сопротивление катушек увеличивается), если ток меньше номинального - сердечники выходят из катушек (сопротивление катушек уменьшается). Из литературных источников неизвестно использование перечисленных факторов для формирования желаемых механических характеристик, что свидетельствует о соответствии заявляемого техническою решения критерию "изобретательский уровень".
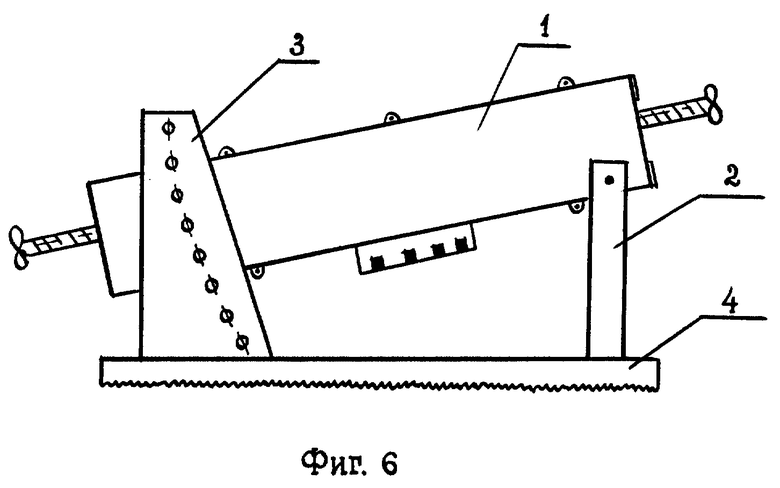
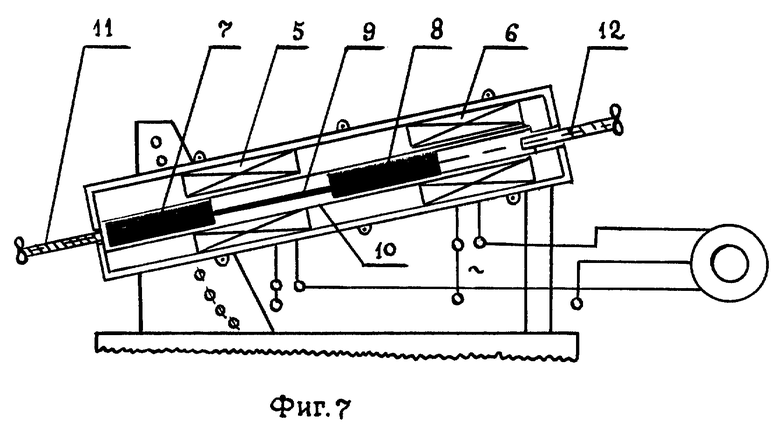
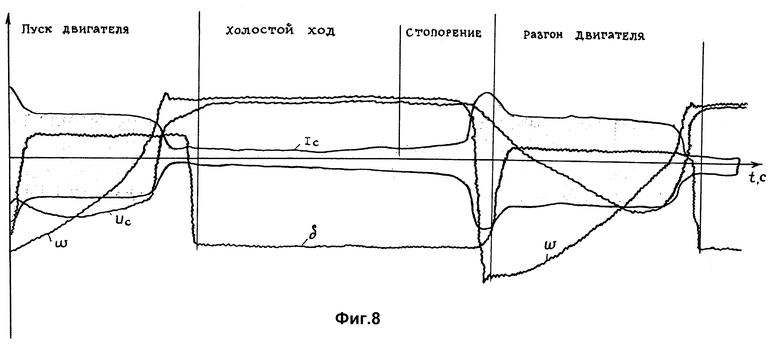
Работа устройства поясняется чертежами, где на фиг. 6 показан общий вид устройства; на фиг. 7 показан продольный разрез устройства, на фиг. 8 представлены переходные процессы при пуске и стопорении двигателя.
Устройство (фиг. 6) состоит из корпуса 1, выполняющего одновременно функцию магнитопровода и состоящего из двух половин, установленного на стойках 2 и 3, прикрепленных к основанию 4 устройства с возможностью изменять угол наклона посредством фиксации одного конца корпуса в нужном положении. Внутри корпуса помещены две катушки 5 и 6, включенные последовательно с обмотками статора приводного двигателя механизма, и два сердечника 7 и 8, соединенные друг с другом жестко немагнитной связью 9. Сердечники помещены в немагнитную направляющую 10. Начальное и конечное внедрение сердечников в катушки производится с помощью ограничителей хода 11 и 12, установленных на торцах корпуса 1.
Для снижения веса и габаритов корпус устройства выполнен из магнитопроводящего материала для выполнения роли магнитопровода. Для удобства обслуживания и монтажа корпус выполнен разборным из двух половин.
Для обеспечения симметрии по фазам сердечники жестко соединены друг с другом немагнитной связью.
Устройство работает следующим образом.
При подаче напряжения в первый момент в цепи статора возникает бросок тока, величина которого определяется начальным внедрением сердечников 7,8 в катушки 5,6. Под действием этого тока сердечники 7,8 занимают крайнее правое положение. Сопротивление цепи становится максимальным, а ток статора снижается до минимального. Таким образом, формируется кратковременный бросок момента двигателя, достаточный для преодоления трения покоя (фиг. 8). Изменяя угол наклона корпуса 1 устройства, можно формировать характер переходного процесса в начальный момент (момент трогания). После разгона ток двигателя уменьшится и, когда достигнет значения, при котором удерживающая сердечники сила станет меньше выталкивающей силы, сердечники 7,8 выходят из катушек. Сопротивление цепи становится минимальным, что обуславливает минимальное падение напряжения на катушках. На фиг. 8 представлены кривые скорости двигателя w, тока статора Iс, напряжения на статоре Uс, а также хода сердечников 5 при пуске двигателя и его перегрузке.
При возникновении перегрузки или "опрокидывании" двигателя резко увеличивается ток статора. Сердечники 7,8 занимают крайнее правое положение, сопротивление статорной цепи увеличивается, что приводит к ограничению тока и момента двигателя (фиг. 8).
Таким образом, в данном устройстве за счет использования свойства инерции сердечников свойства изменения индуктивности катушек устройства, а также настройки происходит формирование желаемых механических характеристик двигателя, обеспечивающих ограничение динамической нагруженности в элементах кинематической цепи машин и механизмов с сухим или граничным трением.
Настройка устройства заключается в установке с помощью ограничителя хода 11 такого внедрения сердечников 7,8, при котором обеспечивается начальный бросок пускового тока, а следовательно, и момента двигателя, величина которого достаточна для преодоления сухого или граничного трения покоя. Затем ограничителем 12 устанавливают такой ход сердечников 7,8, при котором обеспечивается минимальная величина пускового тока и момента двигателя в процессе всего пуска.
Устройство является простым, надежно, не требует сложных настроек. Оно может быть установлено в любых условиях горного производства. Применение устройства повышает срок службы как механизма, так и приводного двигателя.
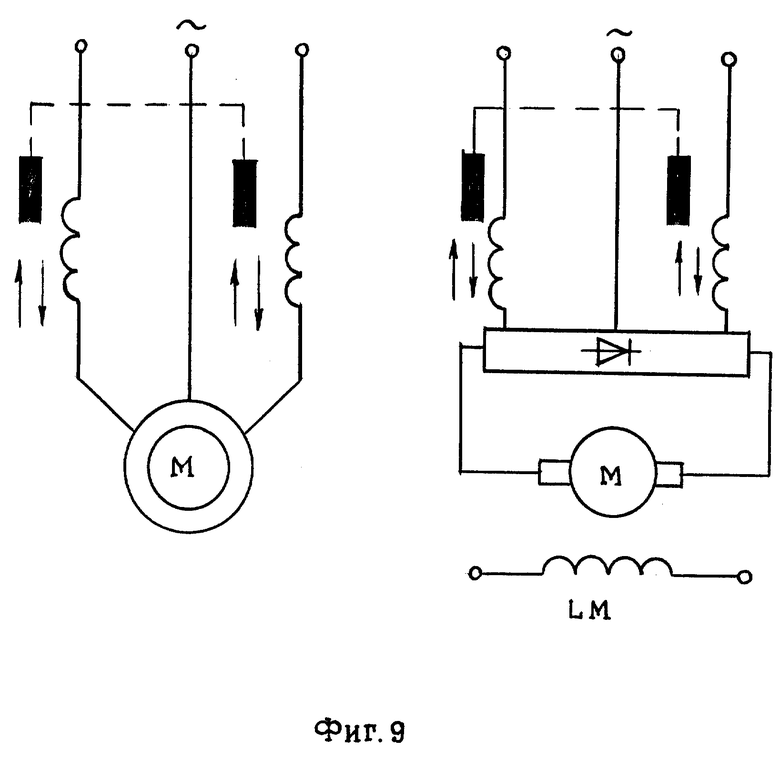
Данное устройство может быть использовано также и с приводным двигателем постоянного тока. В этом случае между устройством и якорем приводного двигателя включен неуправляемый выпрямитель. На фиг. 9 представлены схемы включения устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ ПОД НАГРУЗКОЙ | 2007 |
|
RU2334993C1 |
| СПОСОБ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2133044C1 |
| ВИБРОДВИЖИТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНОЙ ПОВЕРХНОСТИ | 2000 |
|
RU2172696C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА ОДНОКОВШОВОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2255184C1 |
| ДВИЖИТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ ВНУТРИ ФЕРРОМАГНИТНОГО ТРУБОПРОВОДА | 2000 |
|
RU2165369C1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА | 1995 |
|
RU2087396C1 |
| ВЕТРОЭЛЕКТРОГЕНЕРАТОР | 2001 |
|
RU2211949C2 |
| СИНХРОННЫЙ МИКРОДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНЫМ УНИПОЛЯРНЫМ ВОЗБУЖДЕНИЕМ | 2012 |
|
RU2516286C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД ГАЗОРАСПРЕДЕЛИТЕЛЬНОГО КЛАПАНА ПОРШНЕВОГО ДВИГАТЕЛЯ | 2007 |
|
RU2350762C2 |
Использование в механизмах горных машин с нерегулируемыми по скорости приводами. Техническим результатом является ограничение динамической нагруженности в кинематических цепях механизмов при пуске и перегрузках. Устройство состоит из катушек с подвижными сердечниками, включенных последовательно с обмотками статора двигателя, которые помешены в корпус, установленный на стойки, прикрепленные к основанию с возможностью изменения угла наклона корпуса. Перемещение сердечников регулируется ограничителями хода, установленными на торцах корпуса. Сердечники жестко соединены друг с другом немагнитной связью. Корпус устройства выполнен из магнитопроводяшего материала, разборным из двух половин. Применение устройства повышает срок службы как механизма, так и приводного двигателя. 3 з.п. ф-лы, 9 ил.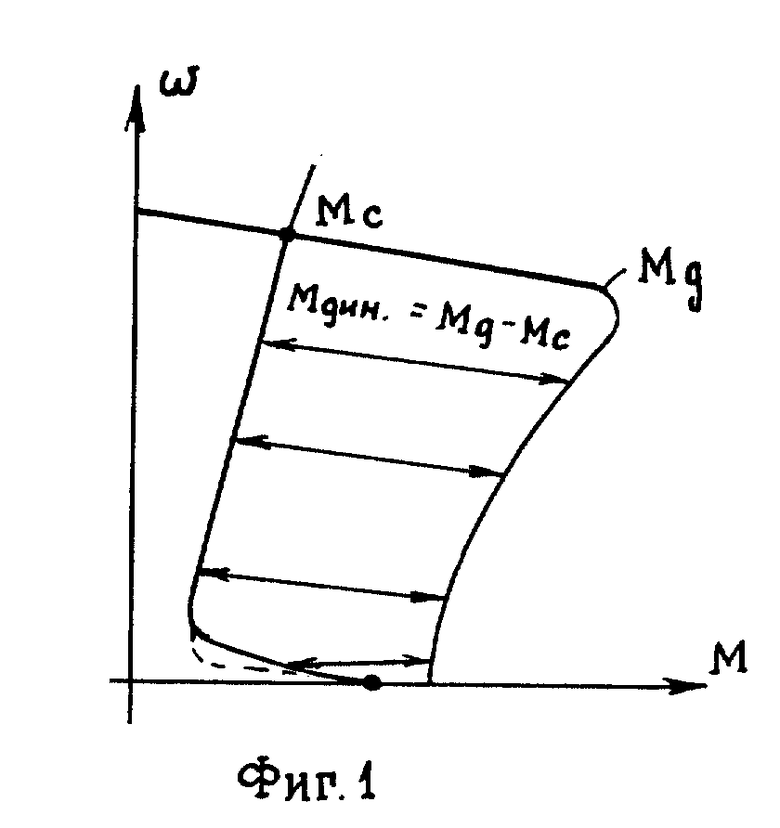
| Электрический привод для врубовой машины | 1932 |
|
SU29545A1 |
| 0 |
|
SU163247A1 | |
| 0 |
|
SU162241A1 | |
| Чилкин М.Г., Соколов М.М., Шинянский | |||
| Асинхронный электропривод с дросселями | |||
| - М.-Л.: Энергия, 1964, с.9-14, рис.1-1, 1-2 | |||
| CH 226774 A, 01.11.43 | |||
| Прессматериал | 1974 |
|
SU523125A1 |

