Изобретения относятся к управлению электроприводами главных механизмов одноковшового экскаватора и могут быть использованы в других приводах постоянного тока горных машин и механизмов, работающих в условиях низких температур и ветровой нагрузки.
Известно, что в зимний период число отказов экскаваторов увеличивается, причем основная доля отказов приходится на металлоконструкции рабочего оборудования экскаватора. Для сокращения частоты и длительности остановок на ремонт в зимнее время необходимо снизить динамические нагрузки в электроприводах главных механизмов экскаватора (подъема, напора, поворота) в режимах пуска, реверсирования, стопорения, регулирования скорости в соответствии с технологией экскавации, останова.
В экскаваторных электроприводах постоянного тока ограничение динамических нагрузок в этих режимах достигается ограничением тока (момента) двигателя с помощью задержанной отрицательной обратной связи по току якоря (отсечки по току) (Ключев В.И. Ограничение динамических нагрузок электропривода. М.: Энергия, 1971, стр.74).
Известен способ управления электроприводом постоянного тока одноковшового экскаватора, реализованный в устройстве по а.с. СССР №1090813, МПК Е 02 F 9/20. Устройство управления электроприводом одноковшового экскаватора /Авт. изобрет. Д.Е.Махно, И.В.Горбунов, Е.А.Дмитриев, Е.П.Овдин, М.А.Айзенберг, Н.Г.Карачабан и В.М.Разживин / Опубл. 07.05.84. Бюл. №17. В данном устройстве описан способ, в котором при низких отрицательных температурах, в зависимости от температуры окружающего воздуха, регулируется величина тока (момента) стопорения двигателя. Чем ниже температура, тем меньше ток стопорения, следовательно, меньше динамические нагрузки при работе экскаватора. В устройстве управление режимами пуска, реверсирования, регулирования скорости, а также останов производятся с помощью командоаппарата, выход которого подключен через параллельно соединенные регулятор ЭДС и звено ограничения к регулятору тока, который соединен с источником регулируемого напряжения на якоре двигателя. Формирователь сигнала, пропорционального температуре окружающего воздуха, подключен к дополнительному входу звена ограничения.
Недостатком данного способа и устройства является то, что при сниженном токе (моменте) стопорения приводного двигателя механизма и возникновении режима перегрузки (стопорения), реального снижения динамических нагрузок в кинематических цепях механизма не происходит. Это обусловлено тем, что динамические нагрузки при стопорении в полной мере определяются запасом кинетической энергии во всех движущихся массах, который пропорционален квадрату скорости движения, и мало зависят от величины тока (момента) стопорения приводного двигателя механизма. Поэтому динамические нагрузки в режиме стопорения оказываются большими. Кроме того, при снижении тока (момента) стопорения ухудшается наполнение ковша при копании, особенно при малой скорости движения ковша, так как момент, развиваемый двигателями механизмов напора и подъема, оказывается также сниженным.
Известен способ, реализованный в устройстве управления электроприводом одноковшового экскаватора, выбранный в качестве прототипа - а.с. СССР №1416625, МПК 4 Е 02 F 9/20. Устройство управления электроприводом одноковшового экскаватора /Авт. изобрет. В.Р.Клименко, И.В.Горбунов, Д.Е.Махно, Е.И.Жученко, Ю.А.Захаров, А.И.Шадрин и B.C.Бров / Опубл. 15.08.88. Бюл. №30. Способ управления электроприводом включает пуск, реверсирование, регулирование скорости приводного двигателя механизма в соответствии с технологией экскавации, останов, а также автоматическое регулирование тока (момента) стопорения приводного двигателя механизма в функции комплексного параметра, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин.
В устройстве-прототипе по данному авторскому свидетельству управление режимами производится с помощью командоаппарата, выход которого подключен через параллельно соединенные регулятор ЭДС и звено ограничения к регулятору тока, который соединен с преобразователем, подключенным к приводному двигателю механизма, а также формирователя комплексного сигнала, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин, который подключен к управляющему входу звена ограничения.
Недостатком данного способа и устройства является большая величина динамической нагрузки в режиме стопорения, а также ухудшение наполнения ковша при копании.
Технический результат предлагаемых способа и устройства заключается в снижении динамических нагрузок при пуске, реверсировании, а также при стопорении и улучшение условий наполнения ковша экскаватора при копании.
Он достигается тем, что в способе управления электроприводом постоянного тока одноковшового экскаватора, включающем пуск, реверсирование, регулирование скорости в соответствии с технологией экскавации, а также регулирование момента стопорения приводного двигателя механизма, регулирование момента стопорения приводного двигателя механизма проводят регулированием тока возбуждения двигателя одновременно и обратно пропорционально величине задания скорости приводного двигателя механизма. Дополнительно проводят регулирование скорости двигателя в функции комплексного параметра, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин.
Регулирование момента стопорения приводного двигателя механизма регулированием тока возбуждения двигателя одновременно и обратно пропорционально величине задания скорости двигателя позволяет формировать максимально возможный пусковой момент, например, двигателей механизмов подъема и напора экскаватора при низких скоростях, равный 1,9-2 момента номинального, что дает возможность обеспечить хорошее наполнение ковша экскаватора при копании. По мере увеличения скорости ток возбуждения уменьшается, следовательно, уменьшается момент двигателя. При работе на основной механической характеристике, соответствующей максимальному заданию скорости, момент стопорения приводного двигателя механизма формируется равным 1,0-1,1 номинального, поэтому скорость двигателя в процессе копания оказывается меньше номинальной и возникающий режим стопорения начинается при меньшей скорости и меньших нагрузках, что и определяет меньший запас кинетической энергии и, следовательно, снижение динамической нагрузки.
Уменьшение момента стопорения приводного двигателя механизма по мере увеличения скорости обеспечивает при пуске движение с меньшим ускорением и, следовательно, с меньшими динамическими нагрузками.
Регулирование скорости приводного двигателя механизма в функции комплексного параметра, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин, позволяет снизить скорость двигателя по мере усиления этих факторов и дополнительно снизить тем самым динамические нагрузки.
Отличием заявляемого способа от прототипа является то, что регулирование момента стопорения приводного двигателя механизма проводят регулированием тока возбуждения двигателя одновременно и обратно пропорционально величине задания скорости двигателя, а также то, что дополнительно проводят регулирование скорости двигателя в функции комплексного параметра, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин.
Этот же технический результат достигается также тем, что устройство управления электроприводом постоянного тока одноковшового экскаватора, содержащее командоаппарат, выход которого подключен через параллельно соединенные регулятор ЭДС и звено ограничения к регулятору тока, который соединен с преобразователем, подключенным к двигателю механизма, а также формирователь комплексного сигнала, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин, дополнительно содержит задатчик тока возбуждения двигателя, регулятор тока возбуждения двигателя, выход которого соединен с источником регулирования тока возбуждения двигателя, задатчик ослабления тока возбуждения двигателя, вход которого соединен с выходом командоаппарата, а выход задатчика ослабления тока возбуждения двигателя соединен со вторым входом регулятора тока возбуждения двигателя, первый вход которого подсоединен к выходу задатчика тока возбуждения двигателя, при этом формирователь комплексного сигнала, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин, соединен со вторым входом регулятора ЭДС.
Отличием заявляемого устройства от прототипа является то, что оно дополнительно содержит задатчик тока возбуждения двигателя, регулятор тока возбуждения двигателя, выход которого соединен с источником регулирования тока возбуждения, задатчик ослабления тока возбуждения двигателя, вход которого соединен с выходом командоаппарата, а выход задатчика ослабления тока возбуждения двигателя соединен со вторым входом регулятора тока возбуждения двигателя, первый вход которого подсоединен к выходу задатчика тока возбуждения двигателя, при этом формирователь комплексного сигнала, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин, соединен со вторым входом регулятора ЭДС.
Наличие задатчика тока возбуждения двигателя и задатчика ослабления тока возбуждения двигателя позволяет сформировать механические характеристики приводного двигателя механизма, при которых на низких скоростях момент двигателя максимально возможный, а по мере увеличения скорости он уменьшается, что и обеспечивает улучшение наполнения ковша экскаватора при копании, а также движение при пуске, реверсировании, стопорении с меньшим ускорением и, следовательно, с меньшими динамическими нагрузками. Подключение формирователя комплексного сигнала, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин на второй вход регулятора ЭДС, позволяет регулировать скорость двигателя механизма в зависимости от величины комплексного параметра и минимизировать динамические нагрузки.
Наличие новой совокупности существенных признаков в предлагаемых способе и устройстве подтверждает соответствие технических решений критерию “новизна”.
Анализ патентной и научно-технической информации не позволил выявить источники, содержащие сведения об известности отличительных признаков заявляемых изобретений, что свидетельствует о соответствии заявляемых изобретений критерию “изобретательский уровень”.
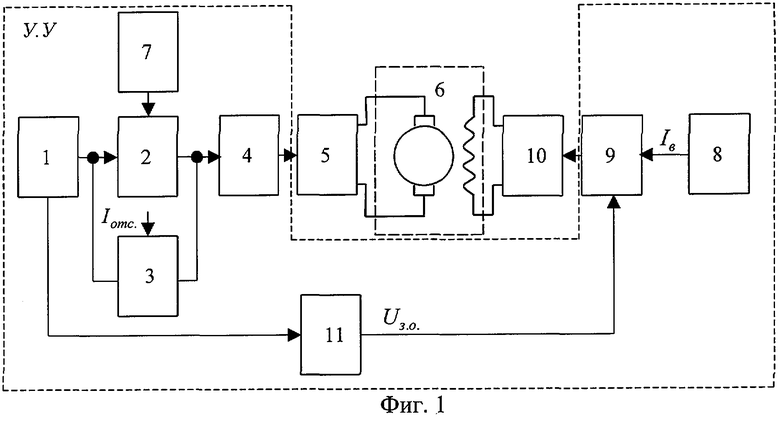
Предлагаемый способ реализуется устройством, которое поясняется функциональной схемой системы управления электропривода механизма экскаватора, помещенной на фиг.1; схемой задатчика ослабления тока возбуждения двигателя, помещенной на фиг.2; механическими характеристиками приводного двигателя механизма  помещенными на фиг.3; графиками упругих моментов
помещенными на фиг.3; графиками упругих моментов  в приводе механизма подъема экскаватора в режиме пуска по прототипу и предлагаемому способу, помещенными на фиг.4; графиками упругих моментов
в приводе механизма подъема экскаватора в режиме пуска по прототипу и предлагаемому способу, помещенными на фиг.4; графиками упругих моментов  в приводе механизма подъема экскаватора в режиме стопорения по прототипу и предлагаемому способу, помещенными на фиг.5.
в приводе механизма подъема экскаватора в режиме стопорения по прототипу и предлагаемому способу, помещенными на фиг.5.
На фиг.1 приняты буквенные обозначения:
У.У - устройство управления электроприводом механизма экскаватора (система управления);
Iв - заданный ток возбуждения;
Iотс - заданный ток отсечки двигателя;
Uз.о. - напряжение задания ослабления тока возбуждения двигателя.
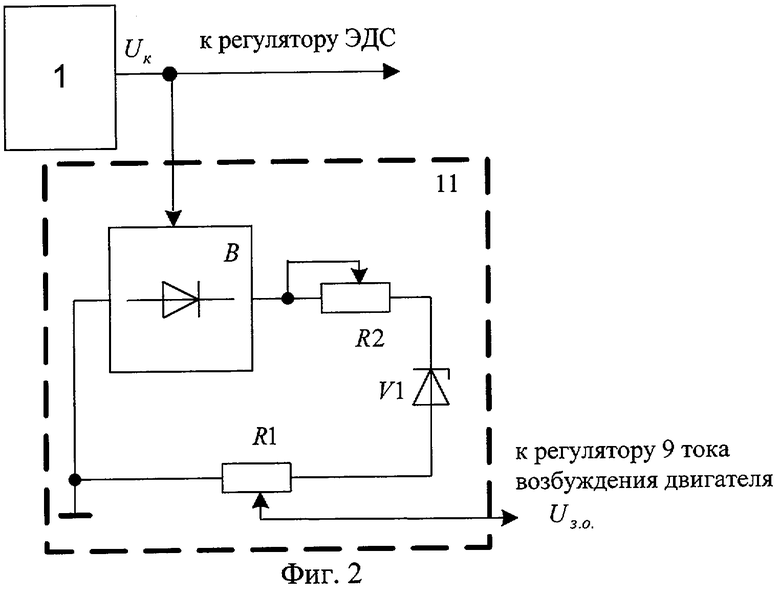
На фиг.2 приняты буквенные обозначения:
Uк - напряжение на выходе командоаппарата (напряжение задания скорости двигателя);
Uз.о. - напряжение задания ослабления тока возбуждения двигателя;
R1 - потенциометр настройки требуемого коэффициента связи между напряжениями Uк и Uз.о.;
V1 - стабилитрон для создания зоны нечувствительности при малой скорости двигателя;
R2 - переменный резистор настройки ширины зоны нечувствительности;
В - выпрямитель для формирования напряжения задания ослабления тока возбуждения двигателя Uз.о. одного знака.
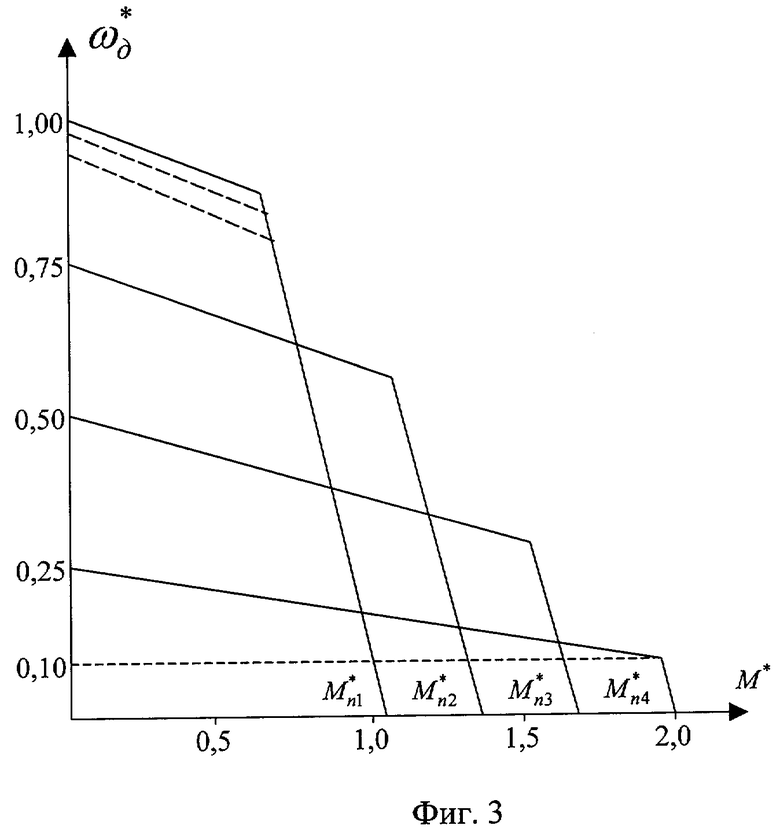
На фиг.3 приняты буквенные обозначения:
 - относительные величины моментов стопорения (пусковых моментов) приводного двигателя при различных напряжениях задания скорости двигателя;
- относительные величины моментов стопорения (пусковых моментов) приводного двигателя при различных напряжениях задания скорости двигателя;
 - относительная скорость двигателя.
- относительная скорость двигателя.
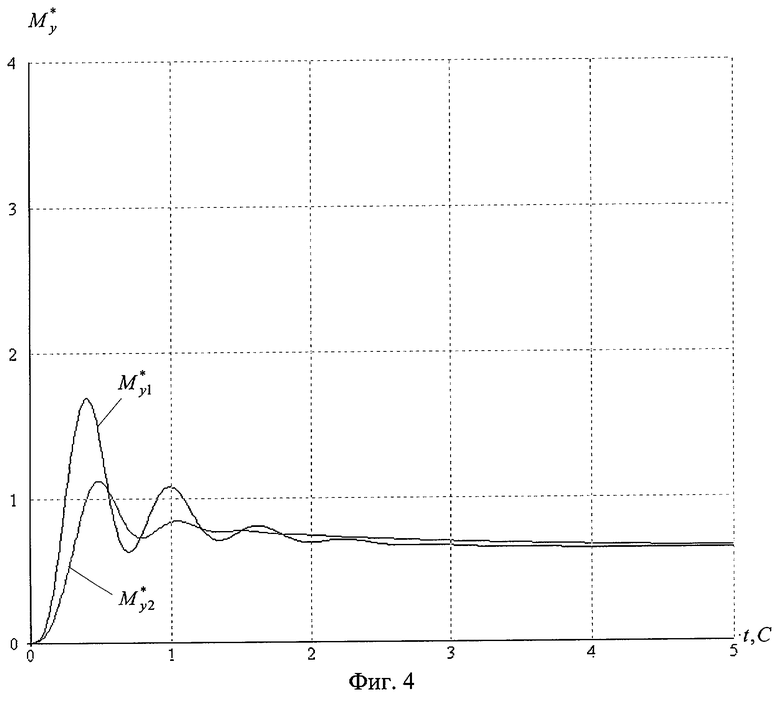
На фиг.4 приняты буквенные обозначения:
 - относительная величина упругого момента в приводе механизма подъема в способе управления по прототипу при работе в режиме пуска;
- относительная величина упругого момента в приводе механизма подъема в способе управления по прототипу при работе в режиме пуска;
 - относительная величина упругого момента в приводе механизма подъема с предлагаемым способом управления при работе в режиме пуска.
- относительная величина упругого момента в приводе механизма подъема с предлагаемым способом управления при работе в режиме пуска.
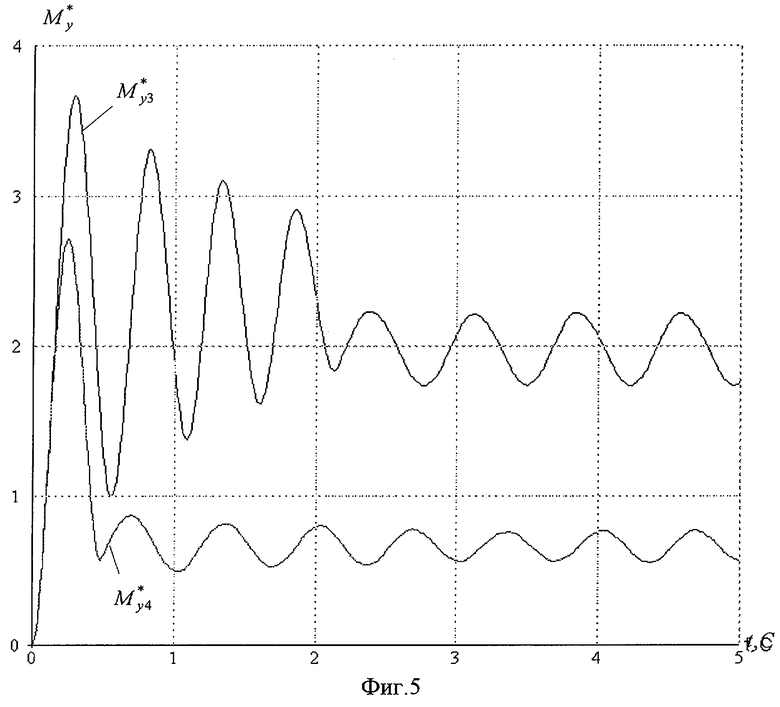
На фиг.5 приняты буквенные обозначения:
 - относительная величина упругого момента в приводе механизма подъема в способе управления по прототипу при работе в режиме стопорения;
- относительная величина упругого момента в приводе механизма подъема в способе управления по прототипу при работе в режиме стопорения;
 - относительная величина упругого момента в приводе механизма подъема с предлагаемым способом управления приводом при работе в режиме стопорения.
- относительная величина упругого момента в приводе механизма подъема с предлагаемым способом управления приводом при работе в режиме стопорения.
Устройство управления электроприводом механизма экскаватора включает командоаппарат 1, выход которого подключен через параллельно соединенные регулятор 2 ЭДС и звено 3 ограничения к регулятору 4 тока, который соединен с преобразователем 5 приводного двигателя 6 механизма. Формирователь 7 комплексного сигнала, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин, соединен со вторым входом регулятора 2 ЭДС. Задатчик 8 тока возбуждения двигателя подсоединен к первому входу регулятора 9 тока возбуждения двигателя, выход которого соединен с источником 10 регулирования тока возбуждения двигателя. Вход задатчика 11 ослабления тока возбуждения двигателя соединен с выходом командоаппарата 1, а выход задатчика 11 ослабления тока возбуждения двигателя соединен со вторым входом регулятора 9 тока возбуждения двигателя.
Настройка устройства управления У.У заключается в следующем.
В период сезонной наладки устанавливается заданный ток отсечки Iотс. двигателя (фиг.1). Задатчиком 8 тока возбуждения устанавливается заданный (номинальный) ток возбуждения Iв. двигателя. В задатчике 11 ослабления тока возбуждения двигателя с помощью потенциометра R1 (фиг.2) устанавливается требуемый коэффициент связи между напряжением Uк на выходе командоаппарата 1 и напряжением Uз.о. задания ослабления тока возбуждения двигателя, обеспечивая при разных положениях командоаппарата формирование семейства механических характеристик приводного двигателя  представленных на фиг.3. Максимальный момент стопорения двигателя
представленных на фиг.3. Максимальный момент стопорения двигателя  выбирается равным 1,9-2,0 номинального момента двигателя, который остается неизменным в диапазоне скоростей от 0 до 0,1 номинальной скорости двигателя и обеспечивается путем формирования зоны нечувствительности с помощью стабилитрона V1 и переменного резистора R2 (фиг.2). Минимальный момент стопорения
выбирается равным 1,9-2,0 номинального момента двигателя, который остается неизменным в диапазоне скоростей от 0 до 0,1 номинальной скорости двигателя и обеспечивается путем формирования зоны нечувствительности с помощью стабилитрона V1 и переменного резистора R2 (фиг.2). Минимальный момент стопорения  выбирается равным 1,0-1,1 номинального момента двигателя. На фиг.3 изображены так же промежуточные механические характеристики приводного двигателя с моментами стопорения
выбирается равным 1,0-1,1 номинального момента двигателя. На фиг.3 изображены так же промежуточные механические характеристики приводного двигателя с моментами стопорения 

Работа привода механизма подъема экскаватора в процессе копания с предлагаемым способом управления осуществляется следующим образом.
Машинист экскаватора, устанавливая командоаппарат 1 в нужное положение, задает требуемую скорость движения привода механизма. В варианте быстрого перемещения рукоятки командоаппарата 1 в крайнее положение формируется основная механическая характеристика приводного двигателя, соответствующая максимальной рабочей скорости привода подъема. Напряжение Uк на выходе командоаппарата будет максимальное.
Напряжение задания ослабления тока возбуждения Uз.о. двигателя также максимальное, а момент стопорения (пусковой момент)  на этой характеристике - минимальный (фиг.3). Если при взаимодействии ковша с забоем нагрузка двигателя механизма подъема окажется больше пускового момента
на этой характеристике - минимальный (фиг.3). Если при взаимодействии ковша с забоем нагрузка двигателя механизма подъема окажется больше пускового момента  то движения не будет и машинисту придется задать меньшую скорость движения, при которой пусковой момент станет больше момента нагрузки. Начнется наполнение ковша. Следовательно, наиболее рациональным управлением является управление с плавным переходом от меньшей скорости на большую, что и будет вынужден делать машинист. В этом случае разгон будет происходить с минимальными ускорениями и, следовательно, минимальными динамическими нагрузками.
то движения не будет и машинисту придется задать меньшую скорость движения, при которой пусковой момент станет больше момента нагрузки. Начнется наполнение ковша. Следовательно, наиболее рациональным управлением является управление с плавным переходом от меньшей скорости на большую, что и будет вынужден делать машинист. В этом случае разгон будет происходить с минимальными ускорениями и, следовательно, минимальными динамическими нагрузками.
В качестве примера, на фиг.4 представлены графики упругих моментов (динамических усилий) в приводе механизма подъема экскаватора ЭКГ - 12,5 при пуске:  - упругий момент в приводе со способом управления электроприводом прототипа;
- упругий момент в приводе со способом управления электроприводом прототипа;  - с предлагаемым способом управления электроприводом одноковшового экскаватора. Видно, что в приводе с предлагаемым способом управления динамические нагрузки меньше на 30%.
- с предлагаемым способом управления электроприводом одноковшового экскаватора. Видно, что в приводе с предлагаемым способом управления динамические нагрузки меньше на 30%.
Регулирование скорости двигателя в функции комплексного параметра, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин, снижает скорость двигателя по мере увеличения этих факторов. Двигатель механизма работает на механических характеристиках, показанных пунктирными линиями (фиг.3). Поэтому стопорение начинается при меньшей скорости и меньших нагрузках. Запас кинетической энергии оказывается меньше, следовательно, динамические нагрузки снижены.
На фиг.5 представлены графики упругих моментов в приводе механизма подъема при стопорении:  - упругий момент в приводе со способом управления электроприводом прототипа;
- упругий момент в приводе со способом управления электроприводом прототипа;  - с предлагаемым способом управления электроприводом одноковшового экскаватора. Видно, что в приводе с предлагаемым способом управления динамические нагрузки также меньше на 30%.
- с предлагаемым способом управления электроприводом одноковшового экскаватора. Видно, что в приводе с предлагаемым способом управления динамические нагрузки также меньше на 30%.
Для удержания ковша в нужном положении при транспортировании груза на разгрузку машинист переводит ручку командоаппарата 1 в нулевое положение. Напряжение на выходе командоаппарата Uк снижается до нуля. Двигатель механизма подъема переходит в тормозной режим. Напряжение задания ослабления тока возбуждения Uз.о. также снижается до нуля. Ток возбуждения двигателя нарастает до заданного (номинального) значения. Этот процесс проходит достаточно плавно, вследствие значительной электромагнитной инерции цепи возбуждения двигателя. Поэтому тормозной момент двигателя по мере снижения скорости нарастает плавно, интенсивность торможения в приводе меньше по сравнению с интенсивностью торможения в приводе со способом, реализованным в прототипе.
Таким образом, применение предлагаемого способа и устройства позволяет снизить динамические нагрузки в электроприводе одноковшового экскаватора, повысить надежность экскаватора за счет снижения числа отказов экскаватора в зимний период, улучшить наполнение ковша экскаватора при копании.
Способ и устройство являются простыми как с точки зрения модернизации существующих систем управления электроприводами главных механизмов одноковшовых экскаваторов, так и наладки и эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU730939A1 |
| СПОСОБ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПОСТОЯННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2133044C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1987 |
|
SU1532674A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
Изобретения относятся к управлению электроприводом постоянного тока главных механизмов одноковшового экскаватора и могут быть использованы в других приводах постоянного тока горных машин и механизмов, работающих в условиях низких температур и ветровой нагрузки. Технический результат предлагаемых способа и устройства заключается в снижении динамических нагрузок при пуске, реверсировании, а также при стопорении и улучшении условий наполнения ковша экскаватора при копании. Сущность способа управления состоит в регулировании момента стопорения двигателя (Д) регулированием тока возбуждения двигателя (ТВД) одновременно и обратно пропорционально величине задания скорости Д. Дополнительно проводят регулирование скорости Д в функции комплексного параметра, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин. Устройство для осуществления способа дополнительно содержит задатчик ТВД механизма, регулятор ТВД, выход которого соединен с источником регулирования ТВД, задатчик ослабления ТВД, вход которого соединен с выходом командоаппарата, а выход - со вторым входом регулятора ТВД. Первый вход регулятора ТВД подсоединен к выходу задатчика максимального ТВД. При этом формирователь комплексного сигнала, учитывающего уровень отрицательной температуры металла машины, ветровой нагрузки и скорости изменения этих величин, соединен со вторым входом регулятора ЭДС. 2 н.п. ф-лы, 5 ил.
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1416625A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1983 |
|
SU1090813A1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Способ управления электроприводами одноковшового экскаватора | 1976 |
|
SU615184A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1742425A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
| RU 2055135 C1, 30.12.1993 | |||
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ СИСТЕМЫ ГЕНЕРАТОР-ДВИГАТЕЛЬ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1995 |
|
RU2096563C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| GB 2279774 A, 11.01.1995. | |||

