Настоящее изобретение относится к транспортным средствам, особенно электрического типа, имеющим составную тормозную систему, то есть, электрическую и механическую.
Известно, что блокирование одного или более колес транспортного средства во время торможения оказывает вредное действие на эффективность торможения. Если колесо утрачивает сцепление, это уменьшает тормозное усилие этого колеса и делает транспортное средство неустойчивым.
Специалистам известно несколько антиблокировочных тормозных устройств для моторных вагонов с чисто механическим торможением.
Для случая составного торможения (электрического и механического) известно транспортное средство электрического типа, оборудованное четырьмя электродвигателями, связанными соответственно с четырьмя колесами этого моторного вагона. В дополнение к этим четырем двигателям, способным функционировать в качестве генератора в режиме торможения, обеспечивается механическое тормозное устройство, имеющее четыре дисковых тормоза, связанных соответственно с четырьмя колесами моторного вагона (DE-4225080 A1, 04.02.93).
Антиблокировочное тормозное устройство, описываемое в указанном выше документе, относится только к задней оси в первом варианте и к двум осям во втором варианте.
В первом варианте датчик скорости обеспечивается на каждом из двух колес задней оси. Управляющее устройство регулирует электрический вентиль, обеспечиваемый в гидравлической схеме дисковых тормозов задней оси путем использования двух сигналов, подаваемых соответственно двумя датчиками скорости.
Управляющее устройство используется для реагирования различным образом, как функция от различных параметров вождения транспортного средства, ограничением или снятием давления, прилагаемого к двум тормозам задней оси. В некоторых случаях управляющее устройство регулируется так, что оно уменьшает тормозную пару электродвигателей.
Первый недостаток описанного выше антиблокировочного тормозного устройства относится к управляющему устройству, схема которого является достаточно сложной и трудной. Второй недостаток происходит из-за того, что в управляющем устройстве трудно предусмотреть все мыслимые ситуации вождения. Поэтому очень вероятно, что реакция описанного выше антиблокировочного тормозного устройства в некоторых ситуациях вождения будет неподходящей, что делает это антиблокировочное устройство ненадежным. Кроме того, антиблокировочное тормозное устройство реагирует с увеличенной временной задержкой из-за времени срабатывания управляющего устройства.
Цель настоящего изобретения состоит в преодолении недостатков тормозной системы, описанной выше. При этом задача изобретения состоит в создании транспортного средства, оборудованного составной антиблокировочной тормозной системой (электрической и механической), способной мгновенно и эффективно реагировать на любую ситуацию вождения, когда водитель транспортного средства включает режим торможения.
Для решения поставленной задачи в транспортном средстве с электрической и механической тормозными системами, содержащем колесо, электродвигатель со статором и магнитно связанным с ним ротором, прикрепленным к колесу с возможностью вращения, средство электропитания электродвигателя, средство управления, используемое для работы электродвигателя в электрическом тормозном режиме по сигналу, соответствующему заданному значению регулируемой величины, механическое тормозное устройство, связанное с колесом с возможностью приложения к нему механического момента торможения, средство торможения, устанавливаемое водителем между двумя крайними, ограничивающими его тормозной ход, положениями, и определяющее в зависимости от положения в пределах тормозного хода значения регулируемой величины для средства управления и тормозной момент, измерительное средство, электродвигатель выполнен асинхронным и имеет обмотки статора, создающие вращающееся магнитное поле, средство электропитания - с возможностью работы электродвигателя в качестве генератора или двигателя в режиме торможения транспортного средства, измерительное средство - с возможностью выработки опорного сигнала, соответствующего опорной частоте, пропорциональной скорости транспортного средства, средство торможения - с возможностью одновременного приведения в действие в пределах принятого диапазона тормозного хода при скорости транспортного средства, лежащей в диапазоне заданных значений, механического тормозного устройства и электродвигателя в режиме электрического торможения, а средство управления с возможностью установления частоты магнитного поля обмотки статора каждого электродвигателя, большей нуля и меньшей опорной частоты.
Описываемые выше характеристики приводят к имеющей высокие эксплуатационные качества системе торможения для колеса.
Так как асинхронный электрический двигатель дает пару сил (или крутящий момент), меняющуюся при пробуксовке, а именно как функция разности частот между частотой статора и частотой ротора, во время потери сцепления колеса пара сил электрического торможения, единая при вращении с ротором этого электрического двигателя, автоматически и мгновенно уменьшается без какого бы то ни было вмешательства управляющего устройства.
Когда механическое торможение производится на колесе в то же время, что и электрическое торможение, электрический двигатель реагирует автоматически и мгновенно, как только механическое торможение начинает блокировать колесо, путем уменьшения сначала пары сил электрического торможения. В последующий второй период, если одного механического торможения достаточно для блокировки колеса, то электрический двигатель переходит от функции генератора к функции двигателя, потому что математический знак пробуксовки автоматически перевертывается при данном выборе опорной частоты.
Средство торможения содержит блок формирования сигнала, соответствующего заданному значению регулируемой величины, для средства управления. Механическое тормозное устройство имеет гидравлическую систему и механический тормоз, служащий для приложения к колесу момента механического торможения в функции прилагаемого к механическому тормозу гидравлической системой тормозного давления, определяемого положением тормозной педали средства торможения, причем в гидравлическую систему введен ограничитель давления, выполненный с возможностью ограничения момента механического торможения на уровне, не превышающем максимальный тормозной момент, создаваемый электродвигателем.
Блок формирования сигнала, соответствующего заданному значению регулируемой величины, выполнен в виде датчика давления, прилагаемого водителем к тормозной педали.
Гидравлическая система содержит нагнетательный клапан, служащий для сохранения момента механического торможения по существу нулевого в первом диапазоне значений давления, прилагаемого водителем к тормозной педали, при этом средство управления выполнено с возможностью достижения электродвигателем максимального момента электрического торможения при максимальном значении давления первого диапазона.
Блок формирования сигнала, соответствующего значению регулируемой величины, выполнен в виде датчика положения тормозной педали, устанавливаемого водителем.
Тормозная педаль выполнена с тормозным ходом, в первой своей части не вызывающим возрастания давления в гидравлической системе, а средство управления - с возможностью достижения электродвигателем максимального момента электрического торможения при положении тормозной педали в конце первой части тормозного хода.
Средство торможения выполнено с возможностью обеспечения для принятого диапазона тормозного хода и заданного диапазона скоростей транспортного средства разности между опорной частотой, вырабатываемой измерительным средством, и частотой магнитного поля обмотки статора электродвигателя меньше предварительно определенного максимального значения, а также изменения последнего в функции опорной частоты. Поэтому возможно оптимизировать тормозную систему как функцию скорости транспортного средства.
Транспортное средство имеет два асинхронных электродвигателя, при этом в первом и втором электродвигателях обмотки статора выполнены с одинаковым числом полюсов и присоединены параллельно к средству электропитания, выполненному с возможностью подачи и потребления полного переменного электрического тока в функции сигнала, соответствующего заданному значению регулируемой величины.
Транспортное средство имеет четыре асинхронных электродвигателя, присоединенных параллельно к средству электропитания, а механическое тормозное устройство - два механических тормоза, при этом одна пара электродвигателей связана с передними колесами, а другая - с задними, а оба механических тормоза связаны с передними колесами.
Механическое тормозное устройство снабжено третьим и четвертым механическими тормозами, связанными с задними колесами, при этом каждый из механических тормозов выполнен с возможности создания максимального момента механического торможения, не превышающего тормозной момент, создаваемый связанным с соответствующим колесом электродвигателем.
Измерительное средство включает в себя два датчика частоты вращения, связанных с двумя задними колесами, и соединенный с ними электронный измерительный узел, выполненный с возможностью выработки опорного сигнала, соответствующего максимальной из частот вращения роторов электродвигателей, связанных с задними колесами.
Измерительное средство включает в себя четыре датчика частоты вращения, связанных с двумя задними колесами и двумя передними колесами, и соединенный с ними электронный измерительный узел, выполненный с возможностью выработки опорного сигнала, соответствующего максимальной из частот вращения роторов электродвигателей, связанных с задними и передними колесами.
В результате упомянутых выше специальных особенностей, когда первое колесо частично блокируется под действием тормозного устройства, электрическое торможение уменьшается на этом первом колесе и увеличивается на втором колесе. Таким образом, полное электрическое торможение остается по существу постоянным, пока не будет достигнута максимальная тормозная пара второго асинхронного электрического двигателя.
Другие особенности и преимущества изобретения тоже будут излагаться в следующем далее подробном описании, даваемом со ссылкой на прилагаемые чертежи, которые никоим образом не являются ограничительными и в которых:
Фиг. 1 схематически показывает первое воплощение транспортного средства, оборудованного тормозной системой настоящего изобретения,
фиг. 2 схематически показывает второе воплощение транспортного средства с тормозной системой изобретения,
фиг. 3 схематически показывает третье воплощение транспортного средства, оборудованного тормозной системой изобретения.
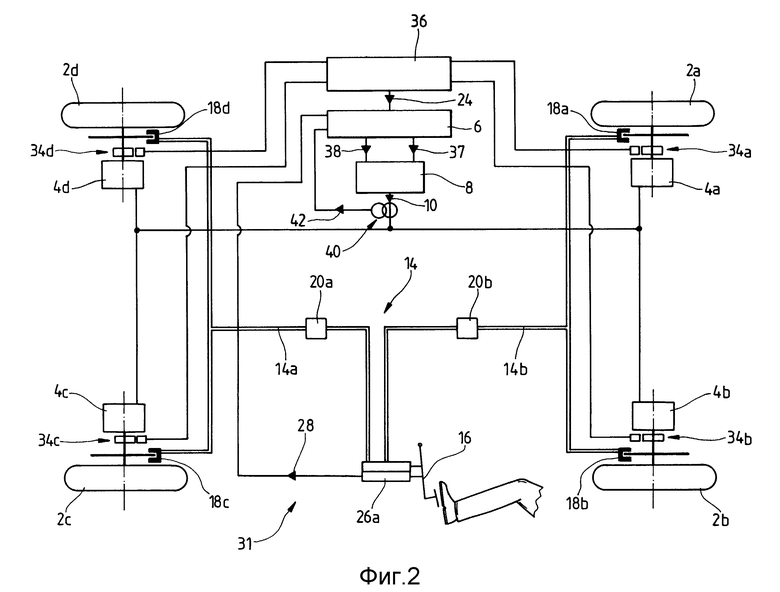
Фиг. 1 представляет транспортное средство 1, оборудованное четырьмя колесами 2a, 2b, 2c и 2d и четырьмя асинхронными электрическими двигателями 4a, 4b, 4c и 4d соответственно.
Каждый из асинхронных электрических двигателей с 4a по 4d имеет статор (не показан) и ротор (не показан), магнитно связанный с статором и единый при вращении с колесом 2 а или с 2b по 2d соответственно, с которым он связывается. Следует заметить, что может обеспечиваться затухание частоты вращения между ротором электрического двигателя и колесом, с которым этот электрический двигатель связывается. В этом случае частота вращения колеса отличается от частоты вращения ротора, далее называемой частотой ротора. Под частотой вращения колеса понимается число оборотов в единицу времени, осуществляемое этим колесом и измеряемое импульсным датчиком, связанным с этим колесом.
Транспортное средство 1 оборудуется также средствами управления 6, служащими для управления работой электрических двигателей с 4a по 4d. Эти средства управления 6 связываются со средствами электрического питания 8, способными питать или поглощать переменный электрический ток 10, в зависимости от того, работают ли электрические двигатели с 4a по 4d в качестве двигателя или в качестве генератора.
Транспортное средство 1 имеет также механическое тормозное устройство, связанное с колесами с 2a по 2d и служащее для приложения механической тормозной пары к каждому из этих колес с 2a по 2d. Это механическое тормозное устройство имеет гидропривод 14, гидравлически соединяющий тормозную педаль 16 с четырьмя механическими тормозами 18a, 18b , 18c и 18d, связанными соответственно с четырьмя колесами с 2a по 2d . Каждый из механических тормозов с 18a по 18d способен прилагать механическую тормозную пару к колесу, с которым он связан, Значение этой механической тормозной пары зависит от значения давления преобладающего в гидравлической схеме 14, причем это давление определяется положением тормозной педали 16, которая может приводиться в действие между двумя крайними положениями, определяющими тормозной ход.
Механическое тормозное устройство, кроме того, имеет ограничитель давления 20, служащий для ограничения механической тормозной пары, прилагаемой к колесам с 2a по 2d транспортного средства 1.
Каждый из статоров асинхронных электрических двигателей с 4a по 4 d имеет обмотку, используемую для того, чтобы создавать магнитное поле, вращающееся с частотой статора, определяемой средствами управления 6. Каждый из роторов двигателей с 4a по 4d соответственно вращается со своей собственной частотой в ответ на вращающееся магнитное поле.
Следует заметить, что питание двигателей с 4a по 4d подается параллельно средствами электрического питания 8, связанными со средствами управления 6. Частота статора вращающегося магнитного поля таким образом одинакова для всех двигателей с 4a по 4d, если каждый из этих двигателей имеет обмотку статора с одним и тем же числом плюсов и витков. Именно это последнее предлагается в каждом воплощении изобретения, описываемых здесь.
Частота статора каждого из четырех двигателей с 4a по 4d таким образом равна и пропорциональна частоте переменного электрического тока 10, подаваемого или поглощаемого средствами электрического питания 8.
Транспортное средство 1 настоящего изобретения кроме того имеет измерительные средства 22, служащие для определения скорости вождения этого транспортного средства 1 и для подачи опорного сигнала 24, имеющего значение, равное частоте вращения, которую имело бы колесо того же диаметра, что и колеса транспортного средства 1, и которое ехало бы без пробуксовывания со скоростью этого транспортного средства 1. Опорная частота ротора соответствует этой опорной частоте и пропорциональна ей. Опорный сигнал в предпочтительном варианте учитывает положение колеса, используемое для направления транспортного средства, при данной разнице скорости вождения колес транспортного средства при повороте.
Если нет никакого затухания между роторами двигателей с 4a по 4d и соответствующими колесами с 2a по 2d, опорная частота, определяемая выше, равна опорной частоте ротора.
Надо заметить, что если бы между каждым двигателем с 4a по 4d и соответствующим колесом, связанным с этим двигателем, обеспечивалось затухание, четыре аттенюатора имели бы тем самым один и тот же коэффициент ослабления.
Коэффициент ослабления между опорной частотой, определенной выше, и опорной частотой ротора точно определен и одинаков для каждого из двигателей с 4a по 4d. Коэффициент ослабления может, следовательно, легко интегрироваться в измерительном устройстве 22, так, чтобы опорный сигнал имел значение, соответствующее опорной частоте ротора, или интегрироваться в средства управления 6, которые затем сами вычисляют опорную частоту ротора простым умножением опорного сигнала 24 на этот коэффициент ослабления. Надо заметить из предшествующего, что термин "опорная частота" соответствует опорной частоте ротора.
Наконец, транспортное средство 1 имеет также блок 26 формирования сигнала, соответствующего заданному значению регулируемой величины, служащий для обнаружения по крайней мере одного параметра в связи с положением педали 16 и для подачи сигнала 28, соответствующего заданному значению регулируемой величины средствам управления 6.
Средства управления 6 выполнены так, чтобы регулировать полную электрическую тормозную пару, создаваемую двигателями с 4a по 4d при приведении в действие тормозной педали 16, как функцию сигнала заданного значения регулируемой величины 28. Средства управления 6 регулируют частоту статора двигателей с 4a по 4d так, что когда тормозной педалью 16 включается режим электрического торможения, разность частот между опорной частотой и частотой статора каждого из двигателей с 4a по 4d положительна. В одном воплощении упомянутая выше разность частот меньше предварительно определенного значения. Надо заметить, что это предварительно определяемое значение может меняться как функция значения опорного сигнала.
Тормозная система настоящего изобретения, описанная выше, является антиблокировочной и особенно эффективна для реагирования соответствующим образом на каждую мыслимую ситуацию вождения. Когда начинается блокировка одного из колес с 2a по 2d, асинхронный электрический двигатель, связанный с ним, мгновенно и автоматически создает более низкую пару электрического торможения, учитывая, что пробуксовка этого асинхронного электрического двигателя уменьшается в абсолютном выражении. Если механическая тормозная пара, прилагаемая к колесу, слишком велика для условий сцепления этого колеса, электрическая тормозная пара, создаваемая электрическим двигателем, легко уменьшается до нуля. Если механическая тормозная пара все еще слишком велика, асинхронный электрический двигатель, связанный с этим колесом, мгновенно и автоматически переходит тогда в режим функции двигателя путем подачи пары запуска, противоположной паре механического торможения.
Если ограничитель давления сконструирован так, чтобы пара механического торможения, прилагаемая каждым из механических тормозов с 18a по 18d, оставалась не превышающей пары, которую может создавать каждый из асинхронных электрических двигателей с 4a по 4d, каждый из двигателей с 4a по 4d может создавать пару запуска, не меньшую максимальной пары механического торможения, которая может прилагаться каждым механическим тормозом с 18a по 18d. Это обеспечивает полностью антиблокировочную тормозную систему.
Заметим, что тормозная система настоящего изобретения применяется также, когда асинхронные электрические двигатели с 4a по 4d не все получают питание параллельно. В одном варианте этого первого воплощения изобретения каждый из четырех двигателей с 4a по 4d управляется и получает питание по отдельности. Во втором варианте этого первого изобретения два из четырех асинхронных электрических двигателей получают питание параллельно от первых средств электрического питания, а два других асинхронных электрических двигателя тоже получают питание параллельно от вторых средств электрического питания. Каждое из этих первых и вторых средств электрического питания управляется своими собственными средствами управления или совместно центральными средствами управления.
Кроме того заметим, что механическое тормозное устройство может быть любого типа, известного специалистам.
Ниже будут описываться со ссылкой на фиг. 2 второе воплощение транспортного средства 31, оборудованного тормозной системой настоящего изобретения.
Здесь не будут снова подробно комментироваться уже описанные ссылки для первого воплощения изобретения.
В этом втором воплощении механическое тормозное устройство имеет гидравлическую схему 14, образованную первой вторичной гидравлической схемой 14a и второй вторичной гидравлической схемой 14b. Эти первая и вторая вторичные гидравлические схемы 14a и 14b независимы друг от друга. Тем не менее, давление, преобладающее в каждой из этих вторичных гидравлических схем 14a и 14b определяется совместно с помощью тормозной педали 16.
На каждой из вторичных гидравлических схем 14a и 14b обеспечивается ограничитель давления 20a и 20b для ограничения давления, способного преобладать соответственно в первой вторичной гидравлической схеме 14a и во второй вторичной гидравлической схеме 14b.
Заметим здесь, что для первой вторичной гидравлической схемы 14a и для второй вторичной гидравлической схемы 14b возможно обеспечить различное максимальное давление. Следовательно, возможно прилагать различную пару механического торможения к передней и к задней частям транспортного средства 31. В последнем случае возможно также обеспечить асинхронные электрические двигатели, способные создавать максимальную электрическую пару с отличающимся значением между двигателями 4c и 4d, обеспечиваемыми в передней части транспортного средства 31, и двигателями 4a и 4b, обеспечиваемыми в задней части транспортного средства 31, все еще при наличии полностью антиблокировочной тормозной системы без какого бы то ни было излишнего изменения размеров того или другого из двигателей с 4a по 4d.
На фиг. 2 измерительные средства, служащие для измерения опорной частоты, по существу пропорциональной частоте вращения колеса, имеющего тот же диаметр, что и колеса с 2a по 2d транспортного средства 31, и едущего без пробуксовки со скоростью этого транспортного средства, образованы четырьмя датчиками частоты вращения 34a, 34b, 34c и 34d, связанными соответственно с колесами 2a и 2d или, что эквивалентно, с четырьмя роторами асинхронных электрических двигателей с 4a по 4d соответственно.
Четыре датчика вращения с 34a по 34d электрически соединены с электронным измерительным устройством 36, которое выдает опорный сигнал 24 для средств управления 6. Электронное измерительное устройство устанавливается так, что опорный сигнал 24, который оно посылает средствам управления 6, имеет значение, соответствующее максимальной частоте ротора двигателей с 4a по 4d или, эквивалентным образом максимальной частоте вращения колес с 2a по 2d.
Как уже говорилось в связи с первым воплощением изобретения, одинаковый и предварительно определенный коэффициент связывает частоту ротора каждого из двигателей с 4a по 4d с частотой вращения колеса 2a, соответственно с 2b по 2d, которое с ним связано. Следовательно для опорного сигнала 24 функционально эквивалентно иметь значение, соответствующее максимальной частоте вращения колес с 2a по 2d или максимальной частоте ротора двигателей с 4a по 4d. Однако средства управления 6, когда посредством тормозной педали 16 включается режим торможения, регулируют частоту статора двигателей с 4a по 4d так, что эта частота статора меньше максимальной частоты ротора.
Заметим, что максимальная частота ротора, образующая опорную частоту, имеет значение, по существу пропорциональное скорости транспортного средства 31, пока по крайней мере одно из четырех колес с 2a по 2d вращается без пробуксовки. Если колесо показывает чуть пробуксовывающее наилучшее сцепление, опорная частота, выдаваемая измерительными средствами средствам управления 6, остается хорошим приближением скорости транспортного средства 31, выраженным как частота вращения ротора одного из четырех двигателей с 4a по 4d.
Заметим, что в этом втором воплощении средства управления 6 будут независимо регулировать частоту и амплитуду напряжения переменного электрического тока 10, питающего четыре асинхронных электрических двигателя с 4a по 4d с помощью соответственно первого сигнала управления 37 и второго сигнала управления 38.
Это второе воплощение дает также измерительный блок 40, служащий для измерения переменного электрического тока 10. Этот измерительный блок 40 направляет средствам управления 6 сигнал 42, значение которого представляет переменный электрический ток 10. Значение сигнала 42 управляется значением сигнала 28, соответствующего заданному значению регулируемой величины, направляемым блоком 26a формирования сигнала средствам управления 6. Таким образом средства управления 6 организуют регулировку амплитуды напряжения и частоты переменного тока 10 как функция сигнала заданного значения регулируемой величины 28. Следовательно сигнал величины 28 регулирует полную пару электрического торможения, учитывая, что эта полная пара электрического торможения определяется значением этого переменного электрического тока 10. Кроме того, как уже было упомянуто, средства управления 6 организуют регулировку частоты статора посредством частоты переменного электрического тока 10 как функция опорного сигнала 24.
Организация электрического торможения совместно с механическим торможением обеспечивается в этом втором воплощении следующим образом: на первом этапе изобретение сначала должно использовать электрическое торможение и должно использовать механическое торможение только на втором этапе, причем электрическое торможение тогда имеет достигало по существу максимальной пары электрического торможения двигателей с 4a по 4d. Для того, чтобы сделать это, блок контрольной точки 26a конструируется как датчик положения тормозной педали 16. Следует заметить, что организация торможения этого второго воплощения, описываемая здесь, может относиться только к некоторому диапазону скоростей, то есть является функцией таким образом, как предлагается настоящим изобретением, в данном диапазоне скоростей и в другом режиме работы за пределами этого данного диапазона скоростей, особенно для низких скоростей.
Тормозная педаль 16 имеет некоторый ход, первая часть которого не вызывает никакого возрастания давления в гидравлической схеме 14. Средства управления используются таким образом, что асинхронные электрические двигатели с 4a по 4d по существу создают максимальную пару электрического торможения, когда тормозная педаль 16 расположена в конце первой части упомянутого выше хода. Во второй части хода, которая может покрываться тормозной педалью 16, электрическое торможение управляется таким образом, что оно создает максимальную пару электрического торможения и пара механического торможения постепенно увеличивается. Для ограничения механического торможения соответственно в первой и второй вторичных гидравлических схемах 14a и 14b обеспечиваются ограничители давления с 20a по 20b.
Если начинается блокировка одного из колес с 2a по 2d, пара электрического торможения, налагаемая на это колесо асинхронными электрическими двигателями, связанными с ним, мгновенно и автоматически уменьшается. Из того, что сигнал 42, направляющий значение переменного электрического тока 10 средствам управления 6 подчиняется сигналу заданного значения регулируемой величины 28 следует, что уменьшение пары электрического торможения на одном из колес с 2a по 2d вследствие блокировки, пока обеспечивается резерв пары электрического торможения, не приводит к уменьшению полной пары электрического торможения. Этот последний вывод образует интересное преимущество параллельного питания двигателей с 4a по 4d.
Заметим, что средства управления 6 используются так, что средства электрического питания 8, управляемые посредством сигналов управления 37 и 38, вызывают оптимальную организацию двигателей с 4a по 4d как функция сигнала заданного значения регулируемой величины 28 и опорного сигнала 24. Для того, чтобы это сделать, средства управления 6 используются для независимой регулировки частоты и амплитуды напряжения переменного электрического тока 10.
Когда уменьшение переменного электрического тока, производимое двигателем (двигателями) колеса (колес), начинающего (начинающих) блокировку, не может компенсироваться увеличением тока, выдаваемого другим(и) двигателем (двигателями), обязательно есть уменьшение переменного электрического тока 10. Если сигнал заданного значения регулируемой величины 28 остается таким же, средства управления 6, используемые для регулирования значения переменного электрического тока 10 до значения сигнала заданного значения регулируемой величины 28, могут реагировать либо увеличением амплитуды напряжения переменного электрического тока 10, либо уменьшением частоты этого переменного тока 10, с тем, чтобы увеличить пробуксовывание каждого из двигателей с 4a по 4d. В последнем случае, в предположении, что опорный сигнал 24 сохраняет постоянное значение, есть опасность сильного уменьшения частоты статора при отклонении от опорной частоты. В этом случае организация торможения уходит от оптимальной организации и возникает опасность уменьшения эффективности торможения, что оказывало бы вредное воздействие на ходовые качества транспортного средства.
В крайнем случае, когда три из четырех колес с 2a по 2d обнаруживают плохое сцепление и водителем транспортного средства 31 приводится в действие аварийное торможение, из предыдущего следует, что частота питания и частота статора имеют значение, меньшее предварительно определенного. Это объясняет, почему для предотвращения возникновения такой ситуации средства управления 6, согласно предпочтительному воплощению изобретения, используются так, что разность между опорной частотой и частотой статора, определяемая частотой переменного электрического тока 10, меньше предварительно определенного значения. Это предварительно определенное значение может меняться как функция значения опорного сигнала 24.
Сигнал торможения, соответствующий второму воплощению изобретения, таким образом особенно надежен. При данной скорости реакции асинхронного электрического двигателя, когда начинается блокировка колеса для уменьшения пары электрического торможения и разблокирования этого колеса, почти невозможно, чтобы четыре колеса с 2a по 2d транспортного средства 31 одновременно находились в состоянии потери сцепления. Измерительное устройство, направляющее опорный сигнал 24, обеспечиваемый в этом втором воплощении изобретения, следовательно очень эффективно выполняет функцию, которую требуется выполнять в почти любой ситуации вождения.
Заметим, что средства управления 6 и средства электрического питания 8 могут также служить для питания электрических двигателей с 4a по 4d в тяговом режиме, в котором эти двигатели с 4a по 4d функционируют в качестве двигателей путем поглощения переменного электрического тока.
Теперь со ссылкой на фиг. 3 будет описываться третье воплощение транспортного средства 45, оборудованное тормозной системой из настоящего изобретения.
Здесь не будут опять подробно комментироваться ссылки, уже описанные для двух предыдущих воплощений.
Транспортное средство 45, соответствующее этому третьему воплощению, по существу отличается от второго воплощения тем, что механическим тормозом соответственно 18c и 18d оборудуются только два колеса 2c и 2d, находящиеся спереди транспортного средства. Эти механические тормоза 18c и 18d приводятся в действие средствами, которые могут приводиться в действие водителем транспортного средства 45, причем они соединяются с механическими тормозами 18c и 18d гидравлической схемой 14c.
И опять, в гидравлической схеме 14c обеспечивается ограничитель давления 20c. В этом третьем воплощении блок 26b заданного значения регулируемой величины образуется датчиком давления, служащим для измерения гидравлического давления, преобладающего в цилиндре 48 гидравлической схемы 14c, причем этот датчик давления 26b выдает сигнал заданного значения регулируемой величины 28, значение которого соответствует гидравлическому давлению, преобладающему в цилиндре 48, а это давление соответствует давлению, приложенному водителем транспортного средства 45 к тормозной педали 16.
Для того, чтобы сохранить пару механического торможения по существу нулевой в первом диапазоне значений давления, приложенного водителем транспортного средства 45 во время торможения, в гидравлической схеме обеспечивается нагнетательный клапан 50. Этот нагнетательный клапан 50 уменьшает давление в части гидравлической схемы 14c, находящейся после механических тормозов 18c и 18d относительно этого нагнетательного клапана 50. Следовательно, в первом диапазоне значений давления, прилагаемого водителем транспортного средства 45, возможно использовать только электрическое торможение. Для того, чтобы достичь этого, средства управления 6 используются так, что электрические двигатели с 4a по 4d по существу достигают максимальной пары электрического торможения для максимального значения из первого упомянутого выше диапазона значений.
Во втором диапазоне значений давления, превышающих значения первого диапазона, электрическое торможение поддерживается механическим торможением.
Заметим, что возможно обеспечить впереди транспортного средства асинхронные электрические двигатели 4c и 4d, которые являются более мощными, чем асинхронные электрические двигатели 4a и 4b, находящиеся сзади этого транспортного средства 45.
Средства, служащие для измерения частоты вращения колеса, соответствующей скорости транспортного средства или соответствующей частоте ротора, образуются в этом третьем воплощении электронным измерительным устройством 36, подобным устройству, описанному во втором воплощении. Однако, в отличие от второго воплощения, это электронное измерительное устройство 36 соединяется только с двумя датчиками частоты вращения 34a и 34b, связанными соответственно с двумя колесами 2a и 2b, находящимися сзади транспортного средства.
Это третье воплощение изобретения имеет то преимущество, что избегает любого риска блокировки одного из двух колес 2a и 2b, находящихся сзади транспортного средства 45, при данном условии, что к этим двум колесам 2a и 2b прилагается только электрическое торможение посредством асинхронных электрических двигателей 4a и 4b. Следовательно, разумно поместить датчики частоты вращения 34a и 34b на двух колесах 2a и 2b соответственно. Из предыдущего следует, что опорный сигнал 24, направляемый средствам управления, является надежным и выполняет свою функцию в любой ситуации вождения.
Для того, чтобы сделать опорный сигнал 24 еще более надежным, вариант этого третьего воплощения предусматривает помещение двух других датчиков частоты вращения соответственно на два передних колеса 2c и 2d подобно второму воплощению, описанному выше.
В другом варианте этого третьего воплощения асинхронные электрические двигатели 4c и 4d, находящиеся спереди транспортного средства, получают питание и управляются независимо от асинхронных электрических двигателей 4a и 4b, находящихся сзади транспортного средства. Следовательно возможно создать в двигателях 4c и 4d, находящихся спереди транспортного средства, рабочую организацию, отличающуюся от организации двигателей с 4a по 4b, находящихся сзади этого транспортного средства.
В этом последнем варианте третьего воплощения возможно, например, использовать средства управления так, что двигатели 4a и 4b, находящиеся сзади транспортного средства включаются во время торможения в тяговом режиме, когда происходит блокировка передних колес 2c и 2d вследствие механического торможения, приложенного к этим последним. Возможно, следовательно, получить полностью антиблокировочную тормозную систему с механическим тормозным устройством на передних колесах 2c и 2d, способную прилагать пару механического торможения, превышающую максимальную электрическую пару, способную подаваться двумя двигателями 4c и 4d, расположенными впереди транспортного средства, при условии, что максимальная пара механического торможения не превышает полной максимальной пары, способном прилагаться четырьмя двигателями с 4 по 4d.
Наконец, заметим, что для тяги транспортного средства 45 может также использоваться узел, образованный четырьмя асинхронными двигателями с 4a по 4d, средствами управления 6, средствами питания 8 и электронным измерительным устройством 36, соединенным с датчиками частоты вращения 34a и 34d. Это последнее замечание приложимо также к первым двум воплощениям, описанным выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 1994 |
|
RU2116896C1 |
| СИСТЕМА ПРИВОДА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2106266C1 |
| ШАССИ БАЛОЧНОГО ТИПА ДЛЯ АВТОМОБИЛЯ | 1994 |
|
RU2133686C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РУЛЕВЫМ МЕХАНИЗМОМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2092359C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДКИ АККУМУЛЯТОРА ЭЛЕКТРОЭНЕРГИЕЙ | 1993 |
|
RU2115207C1 |
| КОРОБКА ПЕРЕДАЧ И СИЛОВОЙ АГРЕГАТ | 1994 |
|
RU2138408C1 |
| АВТОМОБИЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2053145C1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО, ПРЕДНАЗНАЧЕННОЕ ДЛЯ ОТПИРАНИЯ И/ИЛИ ЗАПИРАНИЯ ДВЕРИ ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2101450C1 |
| Асинхронное мотор-колесо с повышенным магнитным сцеплением | 2018 |
|
RU2706669C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2020 |
|
RU2726627C1 |

Изобретение относится к электрическим транспортным средствам с составными тормозными установками. Используемая в данном техническом решении тормозная установка имеет асинхронные электродвигатели, связанные с колесами, и механическое тормозное устройство, выполненное с гидравлической системой и механическим тормозом. Кроме того, тормозная установка включает в себя электронное измерительное устройство, соединенное с датчиками частоты вращения колес. Это устройство выдает опорный сигнал средству управления асинхронными электродвигателями, которое регулирует частоту магнитного поля обмотки статора каждого электродвигателя в функции значения опорного сигнала. Тормозная установка является антиблокировочной и способна мгновенно и эффективно реагировать на любую ситуацию вождения, когда водитель транспортного средства включает режим торможения. 12 з. п. ф-лы, 3 ил.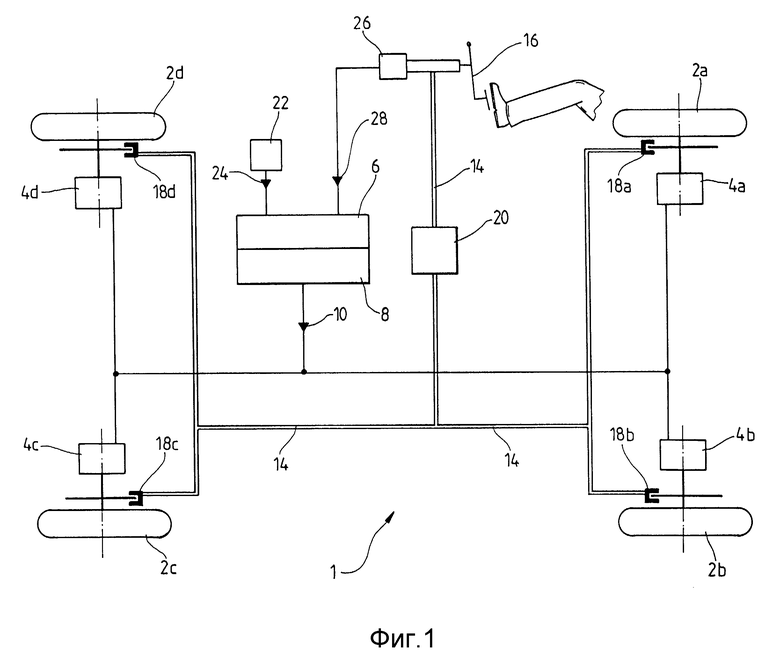
| DE 4225080 A1, 04.02.93 | |||
| RU 2003528 C1, 30.11.93. |
