Изобретение относится к устройству для управления рулевым механизмом транспортного средства, имеющего, по меньшей мере, одно управляемое колесо, поворотное относительно оси поворота, для определения направления движения транспортного средства, присоединенные к устройству средства управления, приводимые в действие вручную водителем транспортного средства, для управления упомянутым транспортным средством, и средства синхронизации, связанные с упомянутым колесом, для синхронизации углового положения этого колеса относительно оси поворота с положением средств управления.
Во всех транспортных средствах, таких как легковые или грузовые автомобили, которые производятся или продаются в настоящее время, средства управления, приводимые в действие вручную водителем, чтобы управлять транспортным средством, состоят из рулевого колеса, установленного на валу, вообще называемым рулевой колонкой, который механически соединяется с управляемыми колесами.
В случае дорожно-транспортного происшествия, например, столкновения с неподвижным препятствием или другим транспортным средством, водитель транспортного средства может быть серьезно травмирован или даже убит, будучи насильственно брошенным на рулевое колесо или, если таковое деформируется или ломается, на конец рулевой колонки, которая может сама выталкиваться внутрь пассажирского салона в направлении водителя.
Более того, сидящий позади водителя, может быть серьезно травмирован или даже убит, будучи насильственно брошенным на приборный щиток или ветровое стекло транспортного средства.
Одно из наиболее эффективных средств, предложенных и осуществленных практически, чтобы устранять или, по меньшей мере, уменьшать эту опасность, состоит в оборудовании транспортного средства пневмоподушками системы пассивной безопасности, которые в нормальных условиях пусты и убраны в подходящие полости и внезапно надуваются в случае столкновения. Этим пневмоподушкам придаются такие размеры и они располагаются таким образом, чтобы, будучи надуты, они амортизировали удар водителя и пассажира об рулевое колесо и о приборный щиток или ветровое стекло.
Полость, приспособленная заключать в себе пневмоподушку системы пассивной безопасности водителя, во время нормального использования, то есть, когда пневмоподушка является пустой и уложенной, очевидно, может располагаться только во втулке рулевого колеса.
Следовательно, с одной стороны, эта втулка обязательно должна иметь относительно большие размеры, которые могут уменьшать обзор приборов приборного щитка, и, с другой стороны, эта пневмоподушка не может надуваться до больших размеров, что ограничивает ее эффективность в случае дорожно-транспортного происшествия.
Другое последствие состоит в том, что пневмоподушка системы пассивной безопасности водителя и пневмоподушка системы пассивной безопасности пассажира должны быть отдельными друг от друга, что повышает их стоимость.
Задача, которую решает изобретение состоит в том, чтобы предложить устройство управления рулевым механизмом транспортного средства, посредством которого исключаются эти недостатки, особенно, посредством которого эффективность защиты, представляемой водителю в случае дорожно-транспортного происшествия, может повышаться и может понижаться стоимость этого устройства системы пассивной безопасности для водителя и его пассажира.
Это достигается устройством, согласно изобретению, которое отличается тем, что приводимые в действие вручную средства управления для управления транспортным средством составляются, по меньшей мере, одним приводимым в действие вручную рычагом управления, который является подвижным в некоторой плоскости, и тем, что средства для синхронизации углового положения управляемого колеса транспортного средства с положением средства управления налаживаются так, чтобы синхронизировать угловое положение этого колеса с положением этого приводимого в действие вручную рычага управления в упомянутой плоскости.
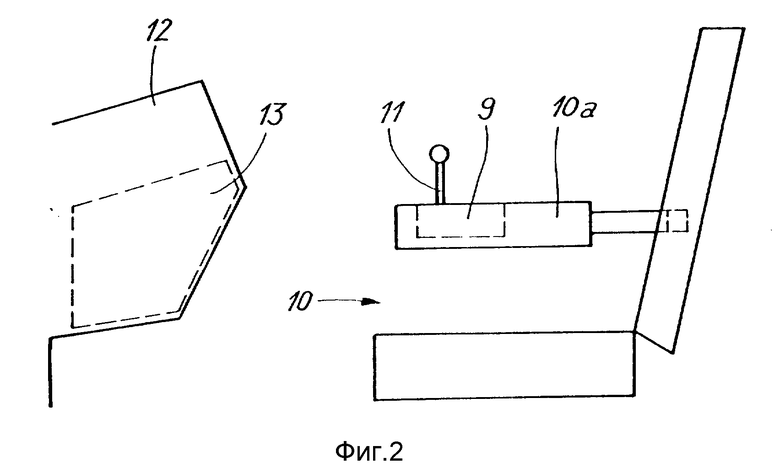
На фиг. 1 представлен схематический частичный вид в плане транспортного средства, включающего устройство управления рулевым механизмом, согласно этому изобретению; на фиг. 2 схематический частичный вид сбоку транспортного средства, показанного на фиг. 1; на фиг. 3 схематически показывает устройство управления рулевым механизмом транспортного средства, согласно фиг. 1; на фиг. 4 представляет схематический частичный вид в плане транспортного средства, включающего другое устройство управления рулевым механизмом, согласно этому изобретению; на фиг. 5 схематически показывает устройство управления рулевым механизмом, согласно фиг. 4; на фиг. 6 схематически показывает другое устройство управления рулевым механизмом для транспортного средства, показанного на фиг. 4.
Транспортное средство, показанное схематически и частично на фиг. 1 в горизонтальной проекции, включает два управляемых колеса 1 и 2, установленных на оси (не показана), таким образом, что каждое колесо может поворачиваться вокруг соответствующего поворотного шкворня, имеющего по существу вертикальную ось, то есть, по существу, перпендикулярного к плоскости фиг. 1.
Колеса 1 и 2 механически связываются с зубчатой рейкой 3 шарнирно сочлененными рулевыми тягами, обозначенными позициями 4 и 5, которые показываются только схематически и не будут описываться подробно, потому что такие элементы хорошо известны специалистам.
Зубчатая рейка 3 направляется в салазках (не показаны), позволяющих ей перемещаться только вдоль, и тяги 4 и 5 устанавливаются таким образом, что колеса 1 и 2 поворачиваются в одинаковом направлении относительно осей 1а и 2а, в качестве реакции на это смещение зубчатой рейки 3. Поворачивание колес 1 и 2 ограничивается на любой стороне упорами, которые не показаны.
Зубцы зубчатой рейки 3 вводятся в зацепление с зубчатым колесом 6, которое самое связывается механически с ротором электродвигателя 7. Этот ротор не показывается отдельно. В зависимости от требований каждого случая, это зубчатое колесо 6 может непосредственно устанавливаться на валу ротора электродвигателя 7 или может соединяться с этим валом через кинематическую цепь на зубчатых передач /не показана/.
Электродвигатель 7 управляется электронной схемой 8, пример которой описывается ниже. Эта схема 8 имеет вход 8а и компонуется таким образом, чтобы синхронизировать угловое положение ротора электродвигателя 7 и, следовательно, угловое положение колес 1 и 2 вокруг их поворотных шкворней 1а и 2а, с регулируемым /переменным/ сигналом, поданным к входу 8а.
Этот регулируемый сигнал подается устройством 9, которое в настоящем примере включается в подлокотник 10а сиденья 10 водителя транспортного средства.
Устройство 9 включает приводимый в действие вручную рычаг управления 11, простирающийся вертикально вверх от верхней поверхности подлокотника 10а /фиг. 2/, и который располагается таким образом, что водитель транспортного средства может легко удерживать его, чтобы наклонять вправо или влево, то есть, в плоскости, по существу, перпендикулярной продольной оси транспортного средства, между двумя концевыми ограничителями /не показаны/. Возможные движения верхнего конца приводимого в действие вручную рычага управления 11 представлены на фиг. 1 пунктирными стрелками g /левое/ и d /правое/.
Устройство 9 также включает детектор положения, который не показывается на фиг. 1, однако, один из примеров такового описывается позже. Этот детектор механически связывается с приводимым в действие вручную рычагом управления 11 и подает электрический сигнал, представляющий положение этого приводимого в действие вручную рычага управления 11.
Сигнал, поданный этим детектором, подается к выходу 8а электронной схемы 8 и используется последней, чтобы контролировать угловое положение ротора электродвигателя 7.
Конечно, транспортное средство, показанное на фиг. 1, также имеет ведущие колеса, которые, сами по себе, могут быть управляемыми колесами, по меньшей мере, один двигатель и средства, например, составленные педалями, которые могут приводиться в действие водителем, чтобы вынуждать транспортное средство двигаться вперед или задним ходом или, чтобы применять тормоза.
Все эти элементы, наряду с многими другими обычными элементами, составляющими оборудование транспортного средства, не показываются на фиг. 1, поскольку они не имеют непосредственного отношения к настоящему изобретению. Вышесказанное относится к другим фигурам, описываемым позже.
Устройство 9 также включает средства для возврата приводимого в действие вручную рычага управления 11 обратно в его срединное или исходное положение, которое также не показываются на фигурах 1 и 2.
Можно легко видеть, что средства управления, приводимые в действие вручную водителем, чтобы управлять транспортным средством, показанным на фиг. 1, составляются в этом примере, приводимым в действие вручную рычагом управления 11.
В эксплуатации, для каждого и всякого положения, в которое водитель транспортного средства устанавливает приводимый в действие вручную рычаг управления 11, устройство 9 образует электрический сигнал, представляющий это положение.
В качестве реакции на этот сигнал электронная схема 8 вызывает вращение ротора электродвигателя 7, который принимает угловое положение, определенное положением приводимого в действие вручную рычага управления 11.
Колеса 1 и 2, которые соединяются с ротором электродвигателя 7 через зубчатое колесо 6, зубчатую рейку 3 и рулевые тяги 4 и 5, таким образом, поворачиваются вокруг поворотных шкворней 1а и 2а соответственно и принимают угловое положение, также определенное положением приводимого в действие вручную рычага управления 11.
Таким образом, устройство рулевого механизма, показанное на фиг. 1, не имеет рулевого колеса. В результате, пространство расположенное между приборным щитком и водителем транспортного средства свободно. Таким образом, представляется возможным обеспечивать одну пневмоподушку, которая надувается в случае аварии, чтобы защищать одновременно водителя и его пассажира, что снижает стоимость этого устройства системы пассивной безопасности, так как цена производства такой одной пневмоподушки является меньше "цены издержек производства" двух отдельных пневмоподушек.
Более того, когда эта пневмоподушка является пустой и сложенной, она может упаковываться в полость, простирающуюся по всей длине приборного щитка.
Таким образом, размеры этой полости могут выбираться так, чтобы когда пневмоподушка надувается она занимала большую часть пространства, отдаляющего водителя от приборного щитка, чем в известных транспортных средствах, что улучшает защиту водителя в случае дорожно-транспортного происшествия.
В дополнение к уже описанным элементам фиг. 2 показывает приборный щиток 12 транспортного средства и полость 13, обеспеченную в приборном щитке 12, чтобы принимать пневмоподушку для предохранения водителя и пассажира транспортного средства.
В примере, показанном на фиг. 3, детектор положения приводимого в действие вручную рычага управления 11, показанного на фиг. 1, состоит из потенциометра 14, движок 14а которого механически соединяется с этим приводимым в действие вручную рычагом управления 11 и клеммы которого 14в и 14с, соответственно, соединяются с положительным напряжением V+ и отрицательным напряжением V- в равных и противоположных по знаку величин относительно земли. Эти напряжения V+ и V- подаются источником напряжения /не показан/.
В движок 14а соединяется с приводимым в действие вручную рычагом управления 11 таким образом, чтобы таковой перемещался по существу на всем протяжении вдоль потенциометра 14, когда этот приводимый в действие вручную рычаг управления перемещается из одного из его крайних положений в другое. Таким образом, в одном из этих крайних положений приводимого в действие вручную рычага управления 11, например, положении, которое таковой занимает, когда рычаг толкается влево к его ограничителю, движок 14а находится, по существу, в зоне напряжения V+, а в другом крайнем положении, в этом примере, когда толкается полностью вправо, движок находится, по существу, в зоне напряжения V-.
Упомянутые выше средства для возвращения приводимого в действие вручную рычага управления 11 обратно в его серединное положение схематически представляются двумя противонаправленно действующими пружинами 11а и 11в, каждой имеющей один конец, соединенным с приводимым в действие вручную рычагом управления 11, и второй конец, соединенным с неподвижной точкой.
Движок 14а потенциометра 14 электрически соединяется с входом 8а электронной схемы 8, которая, сама по себе, соединяется с неинвертирующим входом 15а дифференциального усилителя 15, образующего часть электронной схемы 8.
В данном примере схема 8 включает второй вход 8в, соединенный, с одной стороны, с инвертирующим входом 15в усилителя 15 и, с другой стороны, с движком 16а второго потенциометра 16, клеммы которого 16в и 16с соединяются, соответственно, с одинаковыми напряжениями V+ и V-, что и клеммы 14в и 14с потенциометра 14.
Движок 16а потенциометра 16 механически соединяется с электродвигателем 7, возможно через кинематическую цепь из зубчатых передач, которая может включать часть кинематической цепи из зубчатых передач, соединяющей электродвигатель 7 с зубчатым колесом 6 так, чтобы перемещаться, по существу, по всей протяженности вдоль этого потенциометра 16, когда колеса 1 и 2 /не показаны на фиг. 2/ перемещаются электродвигателем 7 из одного из крайних угловых положений в другое. Для транспортного средства, данного выше в качестве примера, где движок 14а потенциометра 14 находится, по существу, в зоне напряжения V+, когда приводимый в действие вручную рычаг управления 11 толкается полностью влево, движок 16а потенциометра 16 соединяется, соответствующим образом, с электродвигателем 7, то есть так, чтобы движок 16а также находился, по существу, в зоне напряжения V+, когда колеса 1 и 2 полностью поворачиваются влево вокруг поворотных шкворней 1а и 2а, и также, по существу, в зоне напряжения V-, когда колеса 1 и 2 полностью поворачиваются вправо.
В хорошо известном способе напряжение на выходе 15с дифференциального усилителя 15 является положительным, когда напряжение на входе 15а более положительно, чем напряжение на его входе 15в, отрицательным в противоположном случае и нулевым, когда напряжения на его входах являются равными.
Электронная схема 8 далее содержит усилитель мощности 16, вход которого соединяется с выходом 15с дифференциального усилителя 15 и выход которого соединяется с электродвигателем 7.
Схема усилителя 16 несомненно зависит от типа и не будет описываться здесь, так как этот усилитель может быть разработан без всяких проблем квалифицированными специалистами, знающими электродвигатель 7.
Здесь будет просто упоминаться, что усилитель 16 компонуется таким образом, чтобы, в зависимости от того, является ли напряжение на его входе положительным или отрицательным, ротор электродвигателя 7 поворачивался в направлении, производящем поворачивание колес 1 и 2 влево или вправо, и ротор останавливается, когда входное напряжение усилителя 16 является нулевым.
Работа устройства, показанного на фиг. 3, не будет описываться подробно, поскольку таковая является очевидной из предшествующих объяснений. Будет просто отмечаться, что это устройство действительно эффективно синхронизирует угловое положение колес 1 и 2 транспортного средства с положением приводимого в действие вручную рычага управления 11.
Далее отмечается, что устройство, показанное на фиг. 3, может очень хорошо использоваться в случае, где приводимый в действие вручную рычаг управления 11 располагается таким образом, чтобы перемещаться в плоскости, по существу, вертикальной и параллельной продольной оси транспортного средства, то есть вперед или назад. В таком случае, устройство должно компоноваться так, чтобы колеса 1 и 2 поворачивались в первом направлении, когда приводимый в действие вручную рычаг управления 11 перемещается вперед, и в их втором направлении, когда приводимый в действие вручную рычаг управления 11 перемещается назад.
Транспортное средство, показанное схематически и частично на фиг. 4 в горизонтальной проекции, включает, как и показано на фиг. 1, транспортное средство, управляемые колеса 1 и 2, связанные с зубчатой рейкой 3 шарнирно сочлененными рулевыми тягами 4 и 5, зубцы зубчатой рейки 3, приходящие в состояние зацепления с зубчатым колесом 6, которое механически связывается с электродвигателем 7. Все эти элементы являются аналогичными или идентичными элементами, имеющими одинаковые позиции на фиг. 1, и не будут снова описываться здесь.
Как и в случае фиг. 3, электродвигатель 7 механически связывается с детектором углового положения колес 1 и 2, этот детектор не показывается на фиг. 4.
Показанное на фиг. 4 транспортное средство далее содержит два идентичных устройства 31 и 32, включенными в этом примере, соответственно, в правый подлокотник 33а и левый подлокотник 33в сиденья водителя 33.
Устройства 31 и 32 каждое включает приводимый в действие вручную рычаг управления 34, 35 соответственно, который простирается вертикально вверх от верхней поверхности соответствующего подлокотника и располагается таким образом, что водитель транспортного средства может легко держать таковой, чтобы перемещать его вручную вперед или назад в плоскости, по существу, вертикальной и параллельной, и параллельной продольной оси транспортного средства, между двумя крайними положениями, определенными ограничителями, не показаны.
Как будет описываться подробно ниже, каждое из этих устройств 31 и 32 далее содержит детектор положения соответствующего приводимого в действие вручную рычага управления 34 или 35 и электродвигатель, ротор которого механически связывается с этим приводимым в действие вручную рычагом управления. Эти детекторы положения и электродвигатели, которые не показываются на фиг. 4, электрически соединяются с электронной схемой 36, как и электродвигатель 7 и упомянутый выше детектор углового положения колес 1 и 2.
Электронная схема 36, один из примеров которой будет описываться ниже, компонуется так, чтобы любое смещение одного из приводимых в действие вручную рычагов управления 34 и 35 в одном направлении или другом направлении производит смещение той же самой амплитуды, однако, в противоположном направлении другого приводимого в действие вручную рычага управления, так же как вращение электродвигателя 7 в направлении таком, чтобы колеса 1 и 2 поворачивались влево, когда приводимый в действие вручную рычаг управления 34 перемещается вперед или, когда приводимый в действие вручную рычаг управления 35 перемещается назад и таким образом, что эти колеса 1 и 2 поворачиваются вправо, когда приводимый в действие вручную рычаг управления 34 перемещается назад, или когда приводимый в действие вручную рычаг управления 35 перемещается вперед.
Более того, любой поворот колес 1 и 2 влево или вправо, вызванный, например, неровностью грунта, по которому движется управляемое транспортное средство, порождает движение приводимого в действие вручную рычага управления 34 вперед и движение приводимого в действие вручную рычага 35 в направлении назад или, соответственно, движение приводимого в действие вручную рычага управления 34 назад и приводимого в действие вручную рычага управления 35 в направлении вперед.
Таким образом, схема 36 обеспечивает электрическую связь приводимых в действие вручную рычагов управления 34 и 35 друг с другом и с колесами 1 и 2, посредством детекторов положения и электродвигателей, механически связанных с приводимыми в действие вручную рычагами управления 34 и 35 и с колесами 1 и 2.
Эта связь является обоюдной, то есть, каждое смещение любого одного из этих трех связанных элементов, а именно, приводимого в действие вручную рычага управления 34, приводимого в действие вручную рычага управления 35 и колес 1 и 2, вынуждает хорошо определенное смещение других двух элементов.
Таким образом, не только водитель может управлять транспортным средством посредством приводимых в действие вручную рычагов управления 34 и 35, но последние дают ему возможность чувствовать реакции транспортного средства на изменение направления, инициированные водителем или состоянием грунта, в движении по которому управляется транспортное средство, как по отдельности, так и в совокупности, которое обеспечивает большое ощущение безопасной езды.
В примере, показанном на фиг. 5, устройство 31 включает электродвигатель 51, ротор которого, не показан отдельно, механически соединяется с приводимым в действие вручную рычагом управления 34 и с движком 52а потенциометра 52, который составляет детектор положения этого приводимого в действие вручную рычага управления 34 и клеммы которого соединяются, соответственно, с положительным напряжением V+ и с отрицательным напряжением V-, причем эти два напряжения обеспечиваются источником подачи электрической энергии, который не показан. Согласно этому случаю, приводимый в действие вручную рычаг управления 34 или движок 52а, как по отдельности, так и в совокупности, потенциометр 52 могут соединяться непосредственно с валом ротора электродвигателя 51 или могут соединяться с этим валом через кинематическую цепь из зубчатых передач.
Таким же образом, устройство 32 включает электродвигатель 53, ротор которого (также не показан отдельно) механически соединяется непосредственно или через кинематическую цепь из зубчатых передач с приводимым в действие вручную рычагом управления 35 и с движком 54а потенциометра 54, который составляет детектор положения этого приводимого в действие вручную рычага управления 35 и клеммы которого также соединяются соответственно с напряжениями V+ и V-.
По причинам, которые будут становиться очевидными позже в этом описании, электродвигатели 51 и 53, предпочтительно, являются идентичными, как и потенциометры 52 и 54 и механические соединения между этими электродвигателями, движки 52а и 54а потенциометров 52 и 54 и приводимые в действие вручную рычаги управления 34 и 35.
Более того, эти механические соединения должны, предпочтительно, располагаться так, чтобы движки 52а и 54а каждый перемещался, по существу, через всю длину соответствующего потенциометра 52, 54, когда соответствующий приводимый в действие вручную рычаг управления 34, 35, соответственно, перемещается из одного из его крайних положений в другое.
Кроме того, электродвигатели 51 и 53, так же как их механические соединения с приводимыми в действие вручную рычагами управления 34 и 35, соответственно, и их схема питания должны иметь такие размеры, чтобы, когда эти электродвигатели дают максимальный крутящий момент, максимальное усилие, которое прилагается к верхним концам этих приводимых в действие вручную рычагов управления, было одинакового порядка величины или меньше, чем усилие, которое водитель обыкновенного транспортного средства с управлением с усилителем должен прилагать к рулевому колесу, чтобы заставлять транспортное средство изменять направление, или сила, с которой рулевое колесо действует на руки водителя, когда колеса транспортного средства соприкасаются с препятствием или проходят через выбоину на пороге.
Еще в примере, показанном на фиг. 5, ротор электродвигателя 7, который также не показан отдельно и который соединяется с колесами 1 и 2 через зубчатое колесо 6, как описано ранее, также механически соединяется с движком 55а потенциометра 55, который составляет детектор углового положения колес 1 и 2 и клеммы которого также соединяются, соответственно, с напряжениями V+ и V-. В этом случае также, механическое соединение между ротором электродвигателя 7, зубчатым колесом 6 или движком 55а потенциометра 55, как по отдельности, так и в совокупности, может быть прямым или окольным.
Электронная схема 36, также показанная на фиг. 5, включает три дифференциальных усилителя 61, 62 и 63, неинвертирующие входы которых, обозначенные знаком +, и инвертирующие входы которых обозначены знаком -, соединяются с движками 52а, 54а и 55а потенциометров 52, 54 и 55 показанным способом.
Эта электронная схема 36 далее содержит три дополнительных дифференциальных усилителя 64, 65, 66, неинвертирующие и инвертирующие входы которых также обозначаются знаками + и знаками -, соответственно, соединяются с выходами усилителей 61, 62 и 63 показанным способом.
Все дифференциальные усилители 61-66 питаются одинаковыми напряжениями V+ и V-, как и напряжения, подаваемые к клеммам потенциометров 52, 54 и 55. Более того, по причинам, которые будут становиться очевидными далее в настоящем описании, эти усилители 61-66 все компонуются таким образом, что их выходное напряжение является равным разности напряжений, поданным к их входам, настолько точно, насколько это представляется возможным. Средства для придания этой характеристики усилителям 61-66 не будут описываться здесь, поскольку таковые являются хорошо известными специалистам в данной области техники.
Электронная схема 36 далее содержит три усилителя мощности 67, 68 и 69 входы которых, соответственно, соединяются с выходами усилителей 64, 65 и 66 и выходы которых, соответственно, соединяются с электродвигателями 51, 53 и 7. Все эти три усилителя мощности 67-69, конечно, приспосабливаются к электродвигателям, с которыми они соединяются и они кроме того, предпочтительно, компонуются так, чтобы крутящий момент, даваемый этими электродвигателями был, по меньшей мере, по существу пропорциональным напряжению, приложенному к их входу. В следующем далее описании, направление, в котором эти двигатели вращаются, когда поданное напряжение на входе усилителя 67, 68 или 69 является положительным, будет условно называться положительным и наоборот.
Как будет становиться очевидным из следующего далее описания, для устройства, показанного на фиг. 5, чтобы работать, как изложено в описании фиг. 4, необходимо для электрических соединений между усилителями 67, 68 и 69 и электродвигателями 51, 53 и 7 и для механических соединений между электродвигателями 51, 53 и 7 и элементами, ведомыми таковыми, а именно, приводимым в действие вручную рычагом управления 34 и движком 52а, приводимым в действие вручную рычагом управления 35 и движком 54а и зубчатым колесом 6 и движком 55а, соответственно, быть расположенными таким образом, чтобы вращение ротора электродвигателя 51, электродвигателя 53 или электродвигателя 7 в положительном направлении вызывало, соответственно, смещение вперед приводимого в действие вручную рычага управления 34, смещение назад приводимого в действие вручную рычага управления 35 и вращение зубчатого колеса 6 в направлении, производящем поворачивание управляемых колес 1 и 2 влево и, чтобы одинаковые вращения этих роторов также вызывали смещение движков 52а, 54а и 55а в направлении концов потенциометров 52, 54 и 55, соединенных с напряжением V+, и наоборот.
В дальнейшем описании работы схемы, показанной на фиг. 5, напряжения движков 52а, 54а и 55а потенциометров 52, 54 и 55 будут обозначаться позициями U1, U2 и U3, соответственно, а выходные напряжения усилителей 61-66 будут обозначаться буквой U, сопровождаемой позицией обозначения рассматриваемого усилителя.
Легко можно видеть, что какими бы ни были напряжения U1, U2 и U3, выходные напряжения усилителей 61-63 даются уравнениями:
U61 U2 U1
U62 U3 U2
U63 U1 U3
Таким же образом, выходные напряжения усилителей 64-66 даются уравнениями:
U64 U61 U63 U2 + U3 2U1 /1/
U65 U62 U61 U3 + U1 2U2 /2/
U66 U63 U62 U1 + U2 2U3 /3/
Если напряжения U1, U2 и U3 являются равными, напряжения U64, U65 и U66, следовательно, представляют нуль и крутящие моменты, даваемые электродвигателями 51, 53 и 7, также представляют нуль. Эта система находится в состоянии равновесия.
Теперь, если водитель транспортного средства перемещает, например, приводимый в действие вручную рычаг управления 34 вперед, напряжение движка 52а увеличивается и принимает новое значение, которое будет обозначаться выражением U1 + DU1.
Теперь, напряжение U64, приложенное к входу усилителя 67, является отрицательным, ротор электродвигателя 51 имеет тенденцию вращаться в отрицательном направлении, следовательно, имеет тенденцию возвращать приводимый в действие вручную рычаг управления 34 в его предшествующее положение. Таким образом, водитель транспортного средства должен прилагать некоторое усилие к приводимому в действие вручную рычагу управления 34, чтобы поддерживать таковой в его новом положении.
Теперь, напряжение U65, приложенное к входу усилителя 68, является положительным, ротор электродвигателя 53 имеет тенденцию вращаться в положительном направлении и таким образом перемещать приводимый в действие вручную рычаг управления 35 в направлении назад. Если водитель транспортного средства не противодействует этому движению, напряжение ползунка 54а становится положительным. Это напряжение очевидно является переменным, пока приводимый в действие вручную рычаг управления 54а перемещается и будет обозначаться U2 + DU2, причем U2 представляет его первоначальное значение, а DU2 представляет его вариацию.
Таким же образом, напряжение U66, приложенное к входу усилителя 69, теперь является положительным, электродвигатель 7 имеет тенденцию вращаться в его положительном направлении и таким образом имеет тенденцию поворачивать колеса 1 и 2 в направлении влево. Если ничего не противодействует этому повороту, напряжение движка 55а также становится положительным. Как упоминалось выше, это напряжение является переменным, пока поворачиваются колеса, и будет обозначаться U3 + DU3, причем U3 также представляет его первоначальное значение, а DU3 представляет его вариацию.
Можно легко видеть, что, когда приводимый в действие вручную рычаг управления 35 и колеса 1 и 2, соответственно, достигают положений, где DU2 и DU3 являются равными DU1, напряжения U64, U65 и U66 снова становятся нулевыми.
Таким образом, система снова находится в состоянии равновесия, колеса 1 и 2, повернувшиеся влево на угол, определенный амплитудой перемещения вперед приводимого в действие вручную рычага управления 34, приданного водителем транспортного средства, и приводимый в действие вручную рычаг управления 35, переместившийся в направлении назад на одинаковое расстояние, что и приводимый в действие вручную рычаг управления 34.
Работа устройства, показанного на фиг. 5, в случае где водитель транспортного средства перемещает приводимый в действие вручную рычаг управления 34 в направлении назад, может легко прослеживаться из объяснений, которые были даны выше, и не будет подробно описываться здесь.
То же самое относится к работе устройства, показанного на фиг. 5, когда водитель транспортного средства перемещает приводимый в действие вручную рычаг управления 35 вперед или назад, или когда колеса 1 и 2 поворачиваются влево или вправо без перемещения водителем транспортного средства приводимых в действие вручную рычагов управления 34 или 35, например, из-за неровности грунта, на котором управляется транспортное средство в процессе движения.
Устройство, показанное на фиг. 5, таким образом обеспечивает полную и обоюдную синхронизацию положения приводимых в действие вручную рычагов управления 34 и 35 и колес 1 и 2. Благодаря этой особенности данного устройства, водитель транспортного средства может не только управлять транспортным средством, но он постоянно чувствует, через приводимые в действие вручную рычаги управления 34 и 35, реакции транспортного средства на изменения в направлении, которое он придает таковому, и на неровности грунта, на котором управляется транспортное средство в процессе движения. В качестве результата, водитель имеет большое чувство безопасности при управлении его транспортным средством.
Такое безопасное вождение транспортного средства может далее повышаться включением в электронную схему 36, показанную на фиг. 5, подходящих дополнительных компенсирующих схем, например, расположенных, соответственно, между выходами усилителей 64-66 и входами усилителей 67-69 и расположенных таким образом, чтобы исключать любую опасность колебания этого устройства. Такие компенсационные схемы могут, например, быть хорошо известного пропорционально-дифференциального типа.
Эти компенсационных схемы могут также, например, компоноваться так, чтобы модифицировать соответствующие отношения между крутящими моментами, даваемыми электродвигателями 51, 53 и 7, и выходными сигналами усилителей 64, 65 и 66, в качестве функции скорости транспортного средства или амплитуды смещения приводимого в действие вручную рычага управления 34 и приводимого в действие вручную рычага управления 35 или поворота колес 1 и 2.
Эти компенсационные схемы не будут описываться подробно в настоящем описании, так как их структура очевидно зависит от функции, которую они должны выполнять, и, зная эту функцию, специалист в данной области техники не будет иметь никаких особых проблем, чтобы решать вопросы их получения.
Принцип устройства, показанного на фиг. 5 может также применяться к управлению рулевым механизмом транспортного средства, одинакового с транспортным средством, показанным на фиг. 1, то есть, имеющим только один приводимый в действие вручную рычаг управления, который водитель транспортного средства может перемещать вправо или влево, чтобы поворачивать транспортное средство в этих направлениях.
Конечно, в таком случае не будет никакого устройства 32, схема 36 не будет включать усилители 62, 65 и 68, инвертирующий вход усилителя 63 будет соединяться с неинвертирующим входом усилителя 61 и выход последнего соединяется с инвертирующим входом усилителя 66. Более того, электрические и механические соединения между различными компонентами, конечно, должны устанавливаться таким образом, чтобы любое смещение приводимого в действие вручную рычага управления 34 влево и вправо вызывало соответствующий поворот колес 1 и 2 и наоборот.
Одинаковый принцип может также применяться к управлению рулевым механизмом транспортного средства, имеющего более двух управляющих колес, подобно некоторым легковым автомобилям, доступным на рынке в настоящее время, которые имеют четыре управляемых колеса, или подобного определенным транспортным средствам, разработанным, чтобы транспортировать очень длинные грузы, которые могут иметь довольно большое число этих управляемых колес.
В таких случаях, каждая пара управляемых колес должна связываться с некоторым устройством, содержащим электродвигатель, аналогичный электродвигателю 7, и детектор углового положения, аналогичный потенциометру 55. Более того, электронная схема устройства управления должна иметь для каждой пары управляемых колес, усилитель мощности, аналогичный показанному на фиг. 5 усилителю 69, соединенный с электродвигателем, управляющим поворотом этих управляемых колес, и вычислительную схему, аналогичную схемам, каждой образованной усилителями 61 и 64, 62 и 65, и 66, показанными на фиг. 5.
Если общее число подвижных элементов, то есть приводимых в действие вручную рычагов управления и пар управляемых колес, которые должны синхронизироваться друг с другом, обозначается N, можно видеть, что каждая вычислительная схема должна компоноваться таким образом, чтобы подавать усилителю мощности, связанному с ней, сигнал, равный разности между, с одной стороны, суммой всех сигналов, образованных детекторами положения N подвижных элементов, и, с другой стороны, N моментами, когда сигнал образовывался детектором положения, связанным с электродвигателем, управляемым этим усилителем мощности.
В эквивалентной манере, которая соответствует манере, в которой были написаны приведенные выше уравнения /1/ /3/, можно сказать, что каждая вычислительная схема должна подавать связанному с ней усилителю мощности сигнал, равный разности между, с одной стороны, суммой сигналов, поданных /N-1/ детекторами положения, связанными с /N-1/ электродвигателями, которые не управляются этим усилителем, и, с другой стороны, /N-1/ моментами, когда сигнал подавался детектором положения, связанным с электродвигателем, управляющимся этим усилителем.
Пример такого устройства управления рулевым механизмом транспортного средства, имеющего более трех подвижных элементов приводимые в действие вручную рычаги управления и пары управляемых колес, синхронизированные друг с другом, не будет описываться здесь, так как его конструкция легко происходит из объяснений, дававшихся выше.
Модификации, которые могут делаться в описанном выше в настоящем описании устройства в пределах объема этого изобретения, являются очень многочисленными и только немногие из них будут упоминаться ниже в качестве неограничивающих примеров.
Таким образом, различные потенциометры, которые, в описанном выше устройстве, составляют детекторы положения подвижных элементов, могут благоприятно заменяться детекторами положения, в которых не предусматривается никакого механического контакта, таким как емкостные или индуктивные детекторы, чтобы исключать проблемы, которые могут создаваться в потенциометрах, благодаря износу движка, или резистивного элемента, с которым этот движок соприкасается, как по отдельности, так и совокупности.
Эти детекторы положения, которые передают аналогичные сигналы, могут также успешно заменяться детекторами положения, передающими числового типа сигналы, то есть сигналы, образованные последовательностью импульсов, переданной по одному проводу или сигналами, переданными параллельно по совокупности проводов, и каждым представляющим бит /разряд/ двоичного числа. Описанные выше вычислительные схемы, также аналогового типа и образованные описанными выше различными дифференциальными усилителями, конечно, должны в таком случае заменяться подходящими цифровыми вычислительными схемами, которые не будут описываться здесь, так как их составление не представляет никакой проблемы для специалиста в данной области техники.
Кроме того, приводимые в действие вручную рычаги управления 11, 34 и 35 могут иметь форму, отличающуюся от формы, показанной на чертежах. Эти приводимые в действие вручную рычаги управления 11, 34 и 35 могут также механически соединяться с соответствующими устройствами 9, 31 и 32 таким образом, чтобы перемещаться параллельно друг другу, а не поворачиваться вокруг оси, как это показывается на чертежах.
Устройство, согласно этому изобретению может также компоноваться без каких-либо трудностей таким образом, чтобы оно могло питаться двумя напряжениями неравными и противоположными относительно земли, или даже одним напряжением, которое является положительным или отрицательным относительно земли. Преимущество устройства, компонуемого этим последним способом, находится в том факте, что схема для подачи этого одного напряжения является значительно проще, чем схема, которая должна подавать два отдельных напряжения.
Настоящее изобретение также, без всяких трудностей, применяется к случаю, где управляемые колеса транспортного средства являются расположенными в его задней части. В таком случае, электродвигатель, соответствующий электродвигателю 7 в описанных выше примерах, очевидно, должен соединяться с его схемой управления или с этими колесами как по отдельности, так и в совокупности, таким образом, чтобы при всех обстоятельствах эти колеса поворачивались в направлении, противоположном их направлению поворота в данных примерах.
Далее отмечается, что настоящее изобретение применяется, без изменения, к случаю транспортного средства, имеющего только одно управляемое колесо, расположенное в середине передней или задней части данного транспортного средства. Только средства для механического соединения этого одного колеса с электродвигателем для осуществления поворота его влево и вправо, возможно, должны быть отличающимися от средств, которые уже были описаны в случае транспортных средств с двумя управляемыми колесами.
Все компоненты устройства управления рулевым механизмом транспортного средства, показанного на фиг. 5, являются снова присутствующими, с одинаковыми обозначениями позиций, в устройстве, показанном на фиг. 6, и, таким образом, не будут снова описываться здесь. Эти компоненты являются также соединенными друг с другом, как и в устройстве, показанном на фиг. 5, за исключением усилителей 66 и 69, выход и вход которых, соответственно уже не соединяются непосредственно, как это будет описываться ниже.
В дополнение к этим компонентам, показанное на фиг. 6 устройство содержит два измерительных преобразователя 71 и 72, каждый передающий электрический сигнал, имеющий величину, представляющую усилие, приложенное водителем транспортного средства, соответственно, к приводимому в действие вручную рычагу управления 35, в направлении стрелок d или g, показанных на фиг. 4, чтобы управлять транспортным средством.
В этом примере каждый из этих измерительных преобразователей 71 и 72 делается из тензометра с подходящим усилителем и крепится непосредственно на соответствующем приводимом в действие вручную рычаге управления 34, 35. Этот тензометр и этот усилитель не показаны отдельно.
Каждый измерительный преобразователь 71 и 72 может также делаться хорошо известным методом из двух тензометров, установленных на противоположных сторонах соответствующего приводимого в действие вручную рычага управления 34, 35, и связанным с дифференциальным усилителем.
Тензометр /тензометры/ каждого измерительного преобразователя 71 и 72 может также крепиться на валу ротора электродвигателя 51 или электродвигателя 53, соответственно, или, если эти два электродвигателя 51 и 53 соединяются с приводимыми в действие вручную рычагами управления 34 и 35 кинематическими цепями из зубных передач, на валу любого одного из зубчатых колес, составляющих эти кинематические цепи из зубчатых передач.
В таких вариантах осуществления этого изобретения, которые не описывались, так как получение их не составляет никакой проблемы для специалиста в данной области техники, значение сигнала, передаваемого каждым из измерительных преобразователей 71 и 72, является представляющим крутящий момент, передаваемый валом, на котором крепится /крепятся/ тензометр /тензометры/. Однако, когда этот крутящий момент является очевидно пропорциональным усилию, приложенному к соответствующему приводимому в действие вручную рычагу управления 34 или 35, значение сигнала, переданного измерительным преобразователем 71 или измерительным преобразователем 72, также является представляющим это усилие.
Устройство, показанное на фиг. 6, также имеет измерительный преобразователь 73, передающий электрический сигнал, имеющий значение, представляющее крутящий момент, который имеет тенденцию поворачивать колеса 1 и 2 транспортного средства вокруг их поворотных шкворней 1а и 2а /фиг. 4/.
Этот измерительный преобразователь 73 может например, состоять из тензометра, закрепленного на валу ротора электродвигателя 7 и связанного с подходящим усилителем.
Если электродвигатель 7 соединяется с зубчатым колесом 6 /фиг. 4/ кинематической цепью из зубчатых передач, тензометр измерительного преобразователя 73, очевидно, может крепиться к валу любого одного из зубчатых колес, составляющих эту кинематическую цепь из зубчатых передач.
Этот тензометр может также фиксироваться на любой из рулевых тяг 4 и 5, соединяющих зубчатую рейку 3 с колесами 1 и 2, или на этой зубчатой рейке 3 /фиг. 4/.
В таком варианте осуществления данного изобретения, который не описывался, так как получение такового не представляет никакой проблемы для специалиста в данной области техники, значение сигнала, переданного измерительным преобразователем 73, является представляющим усилие, приложенное к элементу, к которому крепится тензометр. Однако, когда это усилие является очевидно пропорциональным крутящему моменту, имеющему тенденцию поворачивать колеса 1 и 2 вокруг их поворотных шкворней 1а и 2а, значение сигнала, образованного измерительным преобразователем 73, является также представляющим этот крутящий момент.
В следующем далее описании, будет предполагаться, что сигналы, произведенные измерительными преобразователями 71, 72 и 73, составляются напряжениями, которые будут соответственно обозначаться позициями для ссылки U71, U72 и U73.
Вычислительная схема 36 показанного на фиг. 6 устройства далее содержит суммирующую схему 74, имеющую четыре ввода, соединенные, соответственно, с измерительными преобразователями 71, 72 и 73 и с выходом усилителя 66, и также выход, соединенный с выходом усилителя 69. Эта суммирующая схема 74 представляет собой схему, хорошо известную специалистам в данной области техники, и, поэтому, не будет описываться здесь, следует только упомянуть, что напряжение U74, которое она дает на ее выходе и, таким образом, подает на вход усилителя 69, дается уравнением:
U74 U66 + U71 + U72 + U73 /4/
Следует здесь заметить, что уравнения /1/, /2/ и /3/, упоминавшиеся выше в связи с работой показанного на фиг. 5 устройства, являются одинаково действительными в случае устройства, согласно фиг. 6, потому что в обоих этих устройствах усилители 61-66 и детекторы положения, образованные потенциометрами 52, 54 и 55, являются идентичными и соединяются вместе одинаковым образом. Выражение U66 уравнения /4/, приведенного выше, может, таким образом, заменяться его значением, данным уравнением /3/, чтобы получать следующее уравнение:
U74 U1 + U2 2U3 + U71 + U72 + U73 /5/
Также будет предполагаться, что измерительные преобразователи 71 и 72 располагаются таким образом, что напряжения U71 и U72 являются положительными, когда водитель транспортного средства прилагает к приводимому в действие вручную рычагу управления 34 и приводимому в действие вручную рычагу управления 35, соответственно, усилие, имеющее тенденцию перемещать этот приводимый в действие вручную рычаг управления 34 или 35 в направлении стрелок, обозначенных g на фиг. 4, а именно, когда водитель желает повернуть транспортное средство влево и когда соответствующий электродвигатель образует крутящий момент, противодействующий этому движению, то есть, крутящий момент, имеющий тенденцию перемещать приводимые в действие вручную рычаги управления в направлении стрелок d, показанных на фиг. 4. Будет напоминаться, что посредством использования одинаковых условностей, как в случае фиг. 5, электродвигатели 51 и 53 образуют такой крутящий момент, когда напряжения U64 и U65, соответственно, являются отрицательными.
Далее будет предполагаться, что измерительный преобразователь 73 располагается таким образом, что напряжение U73 является положительным, когда колеса 1 и 2 подвергаются воздействию крутящего момента, благодаря, например, реакции грунта по которому они катятся, имеющему тенденцию поворачивать их в направлении влево вокруг их поворотных шкворней 1а и 2а (фиг. 4), и что электродвигатель 7 образует крутящий момент, противодействующий этому повороту. Пользуясь снова одинаковыми условностями, как и в показанном на фиг. 9 случае, электродвигатель 7 образует такой крутящий момент, когда напряжение, поданное к выходу усилителя 69, является отрицательным.
Так как работа устройства, показанного на фиг. 6, является очень сложной и зависит от соответствующих характеристик каждого из его компонентов, таковая будет здесь описываться только в очень общей форме. Более того, чтобы упростить это описание будет предполагаться, что для управления транспортным средством, водитель транспортного средства, оборудованного этим устройством, действует только на приводимый в действие вручную рычаг управления 34 и, таким образом, не прилагает никакого усилия к приводимому в действие вручную рычагу управления 35. В этом примере, таким образом, напряжение U72 всегда является нулевым.
Когда транспортное средство следует прямолинейно по совершенно ровному грунту, напряжения U1-U3 и U71-U73, конечно, являются нулевыми. Уравнения /1/, /2/ и /5/, приведенные выше, показывают, что напряжения U64, U65 и U74 таким образом, также являются нулевыми. Поэтому электродвигатели 51, 53 и 7 не образуют никакого крутящего момента.
Тогда, если водитель транспортного средства желает, например, повернуть влево, он действует на приводимый в действие вручную рычаг управления 34, чтобы перемещать его в направлении стрелки g, проходящей от этого приводимого в действие вручную рычага управления 34, показанного на фиг. 4.
Тогда напряжение U1 имеет тенденцию становиться положительным так, чтобы, как показано уравнением /1/, напряжение U64 имело тенденцию становиться отрицательным. Таким образом, электродвигатель 51 образует крутящий момент, противодействующий смещению приводимого в действие вручную рычага управления 64.
Если коэффициент усиления усилителя 67 является большим, который является желательным по причине, которая будет даваться позже, этот крутящий момент также является большим так, чтобы приводимый в действие вручную рычаг управления 34, практически не перемещался при напряжении U1, таким образом, остающимся очень низким.
Однако, одновременно, в качестве результата действия усилия, приложенного водителем транспортного средства к приводимому в действие вручную рычагу управления 34, и крутящего момента, образованного электродвигателем 51, как только что описано, напряжение U71, образованное измерительным преобразователем 71, становится положительным.
Уравнение /5/ показывает, что напряжение U74 становится поэтому также положительным. Тогда электродвигатель 7 начинает вращаться в направлении, которое вынуждает поворот колес 1 и 2 влево вокруг их поворотных шкворней 1а и 2а /фиг. 4/.
Таким образом, напряжение U3 становится положительным, которое, как показано уравнением /1/, заметно дает в результате напряжение U64, становящееся менее отрицательным или даже положительным. Крутящий момент, образованный электродвигателем 51, и который противодействовал смещению приводимого в действие вручную рычага управления 34, таким образом, ослабляется, или даже изменяет направление так, что приводимый в действие вручную рычаг управления 34 может теперь перемещаться в качестве реакции на действие усилия, приложенного к нему водителем транспортного средства.
Однако, следуя этому смещению приводимого в действие вручную рычага управления 34, напряжение U1 становится более положительным так, чтобы напряжение U64 еще раз становилось более отрицательным и снова увеличивался крутящий момент, образуемый электродвигателем 51 в направлении, противодействующем этому смещению.
Тот факт, что напряжение U1 становится более положительным, имеет тенденцию делать напряжение U74 также более положительным, однако, это изменение напряжения U74 компенсируется увеличением напряжения U3 и тем фактом, что одновременно, в качестве результата поворота колес 1 и 2 влево, напряжение U73, образованное измерительным преобразователем 73, становится отрицательным, так как грунт, по которому катятся колеса 1 и 2, образует реактивный крутящий момент, противодействующий их повороту.
Может пониматься, что данный довольно короткий период времени после того, как водитель транспортного средства начал действовать на приводимый в действие вручную рычаг управления 34, является достаточным, чтобы устройство принимало устойчивое состояние.
Теоретические соображения, которые не будут излагаться, здесь показывают, что в этом устойчивом состоянии напряжение U74 является всегда положительным, причем его величина является такой, что крутящий момент, образованный электродвигателем 7, точно уравновешивает таковой, который вызывался реакцией грунта на колеса 1 и 2.
Более того, этот реактивный крутящий момент предупреждает колеса 1 и 2 от достижения углового положения, в котором напряжение U3 могло бы являться равным напряжению U1. Таким образом, это напряжение U3 является меньшим, чем напряжение U1.
Кроме того, так как в настоящем примере водитель транспортного средства не оказывает действия на приводимый в действие вручную рычаг управления 35, последний принимает положение, в котором напряжение U65 является нулевым.
Уравнение /2/ показывает, что в этом случае, напряжение U2 является равным среднему значению напряжений U1 и U3 или другими словами, что:
U2 (U1 U3)/2
Посредством подстановки этого значения в уравнение /1/, можно видеть, что:
U2 (U1 + U3)/2
Так как напряжения U1 и U3 оба являются положительными и первое из них является больше, чем последнее, как можно видеть выше, напряжение U64 является отрицательным, то есть электродвигатель 51 образует крутящий момент, имеющий тенденцию смещать приводимый в действие вручную рычаг управления 34 в направлении стрелки d, простирающийся от этого показанного на фиг. 4 приводимого в действие вручную рычага управления 34. Таким образом, водитель транспортного средства должен постоянно прилагать усилие к приводимому в действие вручную рычагу управления 34, чтобы поддерживать его в требуемом положении, и напряжение U71 остается положительным.
Можно легко видеть, что в уравнении /5/ член (U1 + U2 2U3) является положительным. Так же, как рассматривалось выше, напряжение U71 является положительным, напряжение является нулевым, а напряжение U73 является отрицательным. Член /U71 + U72 + U73/ уравнения /5/, таким образом, является положительным или отрицательным, согласно тому является ли абсолютное значение напряжения U73, соответственно, меньше или больше, чем напряжение U71.
Однако, когда показанное на фиг. 6 устройство находится в состоянии равновесия и напряжение U74 является обязательно положительным, можно видеть, что, если этот член /U71 + U72 + U73/ является отрицательным, его абсолютное значение является меньше, чем значение члена /U1 + U2 2U3/.
Это состояние показанного на фиг. 6 устройства остается устойчивым, пока водитель транспортного средства удерживает приводимый в действие вручную рычаг управления 34 в одинаковом положении и грунт, по которому катятся колеса 1 и 2, является совершенно ровным.
Легко можно видеть, что если водитель изменяет положение приводимого в действие вручную рычага управления 34, чтобы модифицировать траекторию движения транспортного средства, это устройство принимает другое устойчивое состояние, зависящее от нового положения приводимого в действие вручную рычага управления.
Более того, если поворачиваемый крутящий момент, вызываемый грунтом реакцией на колеса 1 и 2, модифицируется, например, благодаря изменению в скорости движения транспортного средства, это устройство также принимает новое устойчивое состояние, зависящее от новой величины этого крутящего момента. В частности, если водитель желает поддерживать транспортное средство на той же самой траектории, он должен в результате модифицировать усилие, которое он прилагает к приводимому в действие вручную рычагу управления 34.
Очевидно, что аналогичные соображения применяются в случае, где водитель желает поворачивать транспортное средство вправо и, таким образом, прилагает к приводимому в действие вручную рычагу управления 34 усилие в направлении стрелки d, отходящей от этого приводимого в действие вручную рычага управления 34, показанного на фиг. 4, и также в случае, где водитель оказывает действие только на приводимый в действие вручную рычаг управления 35, чтобы управлять транспортным средством, или в случае, где он действует одновременно на два приводимых в действие вручную рычага управления 34 и 35.
На практике устойчивое состояние, как только что описанное выше, достигается редко, так как с одной стороны, траектория движения транспортного средства никогда практически не бывает точно круговой в течение относительно продолжительного периода времени и, с другой стороны, грунт, по которому катятся колеса транспортного средства, едва ли когда-либо бывает совершенно ровным.
Однако, можно видеть, что во всех ситуациях водитель сохраняет очень хорошее управление рулевым механизмом транспортного средства, так как каждая модификация положения приводимого в действие вручную рычага управления 34, или приводимого в действие вручную рычага управления 35, как по отдельности, так и в совокупности, производит соответствующую модификацию углового положения колес 1 и 2, и наоборот.
Уравнения /1/ /3/, применявшиеся выше, чтобы объяснять работу показанного на фиг. 5 устройства, показывают, как упоминалось ранее, что любое смещение одного из подвижных элементов, а именно, приводимых в действие вручную рычагов управления 34 и 35, или колес 1 и 2, дает в результате напряжение U64, U65 или U66, поданное к входу усилителя 67, 68 или 69, передающего сигнал управления электродвигателю 51, 53 или 7, который является связанным с этим подвижным элементом, принимающий значение, такое что этот электродвигатель 51, 53 или 7 образует крутящий момент, противодействующий такому смещению подвижного элемента.
Можно видеть, что в случае показанного на фиг. 5 устройства, коэффициент усилия усилителей 67-69 не должен быть слишком большим, так как в противном случае абсолютно никакое движение любого из подвижных элементов может не представляться возможным и, таким образом, это устройство практически могло бы блокироваться.
Однако, если коэффициент усиления усилителей 67-69 является достаточно низким, чтобы позволять показанному на фиг. 5 устройству работать, синхронизация положения каждого из подвижных элементов с положением других подвижных элементов становится неточной, словно соединения между этими подвижными элементами стали до некоторой степени нежесткими.
С другой стороны, в показанном на фиг. 6 устройстве присутствие измерительных преобразователей усилия или крутящего момента 71-73 и тот факт, что сигналы U71-U73, передаваемые этими измерительными преобразователями, комбинируются с сигналом U66 в суммирующей схеме 74 описанным выше способом, чтобы передавать сигнал управления электродвигателем 7, имеет в качестве результата, что коэффициент усиления усилителей 67-69 может быть очень высоким, что придает очень высокую точность взаимной синхронизации различных подвижных элементов, однако, без блокирования этого устройства.
Поэтому, даже если этот коэффициент усиления усилителей 67-69 является очень большим, любое изменение усилия или крутящего момента, приложенных к одному из подвижных элементов, образует изменение напряжения U74 и, в каскаде углового положения колес 1 и 2, напряжения U3, напряжений U64 и U65 положения приводимых в действие вручную рычагов управления 34 и 35.
В других вариантах осуществления устройства, согласно настоящему изобретению, последнее содержит точно одинаковые компоненты, как и показанное на фиг. 6 устройство, однако, выход усилителя 66 непосредственно соединяется с входом усилителя 69. Более того, выход суммирующей схемы 74 соединяется, в первом из этих вариантов осуществления данного изобретения, с входом усилителя 67 и, во втором, из этих других вариантов осуществления настоящего изобретения, с входом усилителя 68. Далее, три входа этой суммирующей схемы соединяются, соответственно, с измерительными преобразователями усилия для крутящего момента 71, 72 и 73, а ее четвертый вход соединяется с выходом усилителя 64 в упомянутом выше первом другом варианте осуществления данного изобретения, и с выходом усилителя 65 в упомянутом выше втором другом варианте осуществления настоящего изобретения.
Любой специалист в данной области техники будет легко видеть, что эти другие осуществления настоящего изобретения, которые не были показаны, как функционируют по способу, который является очень подобным способу показанного на фиг. 6 устройства, так и имеют одинаковые с последним преимущества.
Очевидно, что все модификации, которые могут делаться в показанном на фиг. 5 устройстве и некоторые из которых уже упоминались в данном описании, могут также делаться в показанном на фиг. 6 устройстве. Таким образом, эти модификации не будут здесь упоминаться.




Использование: изобретение относится к устройствам управления рулевыми механизмами транспортных средств. Сущность: устройство управления рулевым механизмом транспортного средства, содержащее приводимый в действие вручную рычаг управления, перемещаемый в некоторой плоскости, который заменяет рулевое колесо обычных транспортных средств. Устройство обеспечивает возможность оборудования транспортного средства одной пневмоподушкой системы пассивной безопасности, расположенной, когда таковая в ненадутом состоянии, в полости, простирающейся по всей ширине приборного щитка транспортного средства, и защищающей водителя и пассажира, сидящего рядом с ним, в случае дорожно-транспортного происшествия. Электронная схема синхронизирует угловое положение колес транспортного средства с положением этого приводимого в действие вручную рычага управления. 9 з. п. ф-лы, 6 ил.
| FR, патент, 1495795, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
