Изобретение относится к оптическим прицельным приспособлениям систем наведения самодвижущихся снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера.
В настоящее время широко известны системы наведения, использующие принцип телеориентации управляемого снаряда в лазерном луче, информационная ось которого совмещена с линией визирования цели [1], [2], [3]. Основной проблемой, возникающей в таких системах, является проблема помехозащищенности, включающая в себя вопросы помехоустойчивости оптической линии связи и вопросы скрытности.
Помехоустойчивость линии связи "цель - визирный канал" и "лазерный канал наведения - приемник управляемого снаряда" в таких системах существенно снижается вследствие скопления дыма двигателя снаряда именно на линии визирования, что при малых боковых ветрах может приводить как к срыву управления снарядом, так и к потере видимости цели оператором.
Скрытность аналогичных систем при современном уровне развития и оснащения техники детекторами лазерного излучения практически пропадает, и наложение лазерного луча наведения на цель в течение всего времени наведения дает противнику достаточно много времени для оказания противодействия (дымовые помехи для канала наведения, лазерное противодействие для визирного канала и т.п.).
В то же время в системах [2] , [3] с помощью оптических элементов (вращающиеся зеркала, призмы, пластины) осуществляются отклонения лазерного луча относительно линии визирования, которые используются для информационного сканирования и за счет которых формируется информационное поле луча наведения. Но, несмотря на это, информационная ось луча наведения остается совмещенной с линией визирования и снаряд ориентируется вдоль нее, что определяет указанные выше недостатки.
Наиболее близкой по технической сути к предполагаемому изобретению является система оружия [4] с оптическим прицелом, в состав которого входят визирный канал и канал наведения управляемого снаряда, включающий в себя лазерный источник излучения, модулятор и оптическую систему с переменным фокусным расстоянием для обеспечения постоянного размера информационного поля модулированного лазерного луча на текущей дальности управляемого снаряда.
Оси визирного канала и каналов наведения совмещены и выводятся через единое отклоняющее зеркало панорамного обзора. Модулятор обеспечивает пространственно-временное кодирование информационного поля луча наведения, а оптическая система, начиная с момента выстрела управляемого снаряда, программно изменяет свое эквивалентное фокусное расстояние F так, чтобы его отношение к текущей дальности снаряда Дсн было постоянным в течение всего полета  что обеспечивает постоянный размер сечения луча на дальности снаряда.
что обеспечивает постоянный размер сечения луча на дальности снаряда.
Недостатком данного прицела является, как и у рассмотренных аналогов, пониженная помехозащищенность системы наведения управляемого снаряда, так как в течение всего полета он ориентируется вдоль линии визирования цели.
Задачей данного изобретения является повышение помехозащищенности системы наведения управляемого снаряда.
Поставленная задача решается за счет того, что в оптическом прицеле системы наведения управляемого снаряда, состоящем из визирного канала и канала наведения, включающего в себя источник лазерного излучения, модулятор и оптическую систему с переменным фокусным расстоянием, между модулятором и оптической системой с переменным фокусным расстоянием установлена плоскопараллельная пластина с возможностью поворота ее относительно оси, перпендикулярной оптической оси канала наведения, введены механизм поворота пластины, механически соединенный с пластиной, схема управления механизмом, формирователь временных интервалов и устройство ввода дальности цели, при этом механизм поворота содержит двигатель, соединенный с ним редуктор, передающий вращение вала двигателя на ось поворота пластины, датчик нейтрального положения пластины, соответствующего перпендикулярному положению пластины относительно оптической оси канала наведения, и датчик максимального поворота пластины, при этом выходы датчиков соединены соответственно с первым и вторым выходами схемы управления механизмом, выход которой электрически соединен с двигателем механизма поворота, а третий вход схемы управления механизмом соединен с выходом формирователя временных интервалов, первый вход которого соединен с выходом устройства ввода дальности цели, а второй - с системой запуска управляемого снаряда.
Задача решается так же за счет того, что устройство ввода дальности цели выполнено в виде ручного органа установки дальности.
Задача решается так же за счет того, что устройство ввода дальности цели выполнено в виде лазерного дальномера.
Задача достигается так же тем, что устройство ввода дальности цели содержит схему определения приоритета данных, орган ручной установки дальности и лазерный дальномер, причем выходы органа ручной установки и лазерного дальномера подключены соответственно к первому и второму входам схемы определения приоритета данных, выход которой подсоединен к выходу устройства ввода дальности цели.
Повышение помехозащищенности системы наведения с предлагаемым прицелом осуществляется за счет того, что введенная пластина при помощи механизма поворота, управляемого схемой по сигналам от датчиков положения пластины и сигналу формирователя временных интервалов поворачивается на определенный угол, что приводит к угловому отклонению оптической оси луча наведения относительно линии визирования цели, пропорциональному оптической толщине пластины и текущему значению эквивалентного фокуса формирующей оптической системы, что тем самым освобождает оптическую линию связи от дыма двигателя снаряда и значительно снижает возможность детектирования лазерного излучения целью, при этом оптическая система с переменным фокусным расстоянием обеспечивает постоянное линейное смещение луча наведения относительно линии визирования на текущей дальности снаряда, а формирователь временных интервалов позволяет по полученным от устройства ввода дальности цели данным перед подлетом управляемого снаряда к цели подать сигнал на схему управления механизмом поворота для снятия отклонения (возвращения пластины в нейтральное положение) и, таким образом, вывода снаряда на линию визирования непосредственно перед поражением им цели.
Предлагаемые в данном техническом решении варианты реализации устройства ввода в канал наведения данных о дальности цели позволяют использовать в качестве него в ручном режиме ввода - ручной орган установки дальности, в автоматическом режиме - лазерный дальномер, а в дублирующем режиме - и ручной орган установки и лазерный дальномер, при этом выбор достоверных данных осуществляет схема определения приоритета данных, что особенно важно при отсутствии достоверных измерений лазерного дальномера в условиях возможных помех (ложные отражения от близлежащих объектов, малоотражающее покрытие цели и т.п.).
На фиг. 1 представлена структурная схема прицела системы наведения управляемого снаряда.
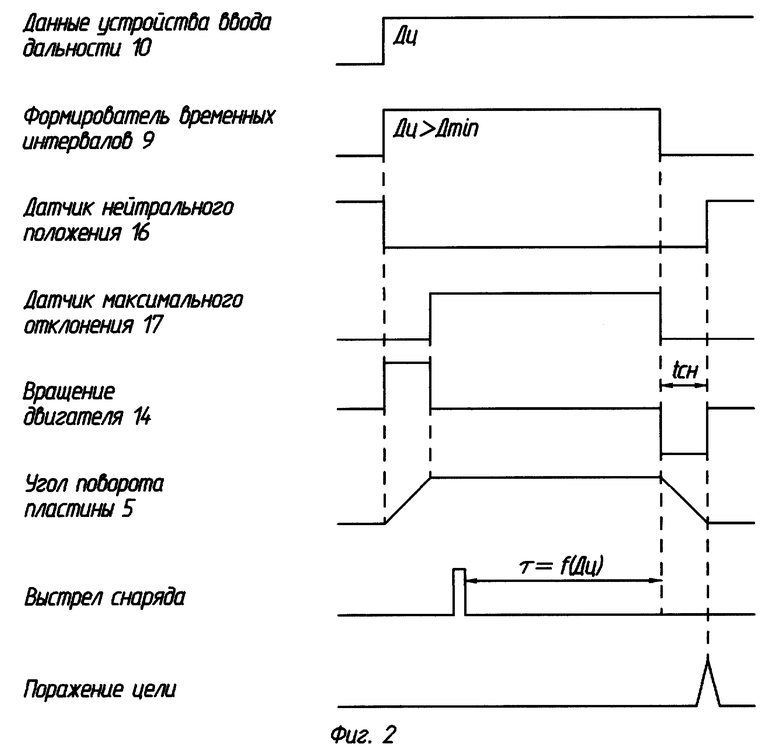
На фиг. 2 представлена в общем виде циклограмма работы прицела при наведении снаряда.
Примером реализации предлагаемого устройства служит оптический прицел (фиг. 1), содержащий визирный канал 1 и канал наведения 2, в состав которого входят лазер 3, модулятор 4, плоскопараллельная пластина 5, механически соединенная с механизмом поворота 6, оптическая система с переменным фокусным расстоянием 7, а также схема управления механизмом поворота 8 и формирователь временных интервалов 9, вход которого подключен к выходу устройства ввода дальности цели 10, состоящего из ручного органа установки дальности 11, лазерного дальномера 12 и схемы определения приоритета 13. Механизм поворота 6 выполнен в виде электродвигателя 14, подсоединенного к редуктору 15, передающему вращение вала двигателя 14 к оси поворота оправы пластины 5, а также снабжен датчиком нейтрального положения 16 и датчиком максимального отклонения 17, выходы которых подключены к соответствующим входам схемы управления 8, которая в свою очередь выполнена в виде схем сравнения 18 и 19, а также усилителя мощности 20. При этом датчики 16 и 17 могут быть выполнены по любой из известных схем электромеханических, электромагнитных или оптронных концевиков.
Представленный оптический прицел системы наведения работает следующим образом. Оси визирного канала 1 и канала наведения 2 при нейтральном положении пластины 5 съюстированы. Оператор наводит ось визирного канала 1 на выбранную цель и лазерным дальномером 12 измеряет до нее расстояние, данные о котором поступают на вход схемы определения приоритета 13, одновременно с этим оператор устанавливает ручным органом 11 дальность, замеренную им по дальномерной шкале визирного канала 1 или полученную по данным внешнего целеуказания. Если данные дальномера 12 и ручного органа установки 11 отличаются на допустимую величину, то схема определения приоритета 13 выводит данные лазерного дальномера, в противном случае за достоверные принимаются данные ручного органа установки дальности 11. Схема определения приоритета может быть выполнена по широкоизвестным цифровым схемам вычитания и сравнения.
Полученные таким образом данные о дальности цели поступают на вход формирователя временных интервалов 9, который представляет собой в общем виде процессор (например серии 1830) с согласующими схемами по входам и выходам, представляющими собой в простейшем случае схемы согласования напряжения логических уровней. Схема 9 при поступлении на нее данных о дальности до цели Дц сравнивает их с хранящейся в ее памяти минимальной дальностью Дmin, допускающей введение превышения оси луча над линией визирования, определяемой известными динамическими характеристиками управляемого снаряда.
В случае если Ду < Дmin схема 9 формирует на выходе уровень логического "0" (режим "Без превышения") и фиксирует его до поступления следующих данных от устройства ввода дальности. Уровень "0" при этом поступает на вход схемы управления механизмом поворота 8, подключенной к первым входам схем сравнения 18 и 19. Если сигнал датчика нейтрального положения 16, подключенный ко второму входу схемы сравнения 18 свидетельствует о том, что пластина находится не в нейтральном положении (логический "0"), то схема 18 формирует выходной сигнал (логическая "1"), который через усилитель мощности 20 приводит в движение двигатель 14, вал которого через редуктор 15 поворачивает пластину 5 до момента появления сигнала с датчика 16, после чего сигнал управления пропадает и двигатель 14 останавливается (см. фиг. 2), фиксируя при этом пластину 5 в нейтральном положении. После этого производится выстрел, и процесс телеориентации снаряда происходит без превышения луча наведения над линией визирования.
Если Ду > Дmin (см. фиг. 2), то схема 9 формирует на своем выходе сигнал логической "1" (режим "Превышение"), при этом схема сравнения 19 формирует сигнал управления до момента появления сигнала датчика максимального отклонения 17 с работой элементов механизма аналогично описанному выше и фиксирует пластину 5 в положении, максимально повернутом на угол α относительно оптической оси канала наведения в вертикальной плоскости. При этом информационная ось луча наведения смещается вверх относительно линии визирования цели на величину, которую в упрощенном виде можно представить зависимостью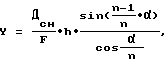
где α - угол поворота пластины относительно оптической оси канала наведения в вертикальной плоскости;
h - оптическая толщина пластины;
n - показатель преломления материала пластины;
Дсн - программная дальность снаряда;
F - эквивалентное фокусное расстояние оптической системы.
Как было указано выше, закон изменения фокусного расстояния оптической системы таков, что отношение
то есть величина смещения информационной оси луча наведения относительно линии визирования цели будет постоянна на текущей дальности управляемого снаряда и определяется параметрами h, n и углом максимального отклонения α, зафиксированным датчиком 17.
Затем по известной дальности цели Дц формирователь временных интервалов 9 определяет значение времени начала снятия превышения τ = f(Дц).
Функция f(Дц) хранится в памяти процессора и в простейшем виде представляет собой зависимость
f(Дц) = tп(Дц) - tсн ,
где tп(Дц) - известное полетное время снаряда на дальности цели Дц;
tсн - время снятия превышения, определяемое быстродействием механизма поворота пластины и динамическими характеристиками снаряда, определяющими переходный процесс слежения за опускающейся информационной осью луча наведения.
Система запуска управляемого снаряда производит пуск и в момент выстрела формирует на втором входе формирователя 9 сигнал, от которого формирователь 9 отсчитывает вычисленное им время τ = f(Дц), и по истечении его обнуляет свой выходной сигнал. Далее схема управления 8 и механизм поворота 6 работают аналогично случаю (Ду < Дmin) и приводят пластину 5 в нейтральное положение, определяемое датчиком 16.
В течение времени τ = f(Дц) с момента выстрела, как было показано выше, информационная ось луча на дальности снаряда смещена относительно линии визирования на постоянную величину Y, при этом снаряд ориентируется вдоль смещенной оси луча наведения и дым его двигателя не скапливается на линии визирования и, кроме того, луч наведения не наложен на цель, что препятствует детектированию излучения целью.
С момента времени τ = f(Дц) луч наведения совмещается с линией визирования, что позволяет вывести снаряд на цель непосредственно перед его подлетом и поражением цели.
При этом использование лазерного дальномера 12 в качестве источника информации о дальности цели позволяет минимизировать время нахождения снаряда на линии визирования и тем самым предельно сократить время на детектирование излучения целью и возможное противодействие наведению, так как современные дальномеры обладают точностью определения дальности порядка ±5 м при благоприятной помеховой обстановке. При сложной же помеховой обстановке более высокой достоверностью обладают визуальные способы определения дальности цели, при этом в случае дублирования всех предлагаемых вариантов измерения дальности дополнительно повышается помехоустойчивость данных о дальности цели.
Таким образом, описанное выше устройство прицела позволяет повысить помехоустойчивость оптической линии связи и скрытность системы наведения, что повышает ее помехозащищенность и позволяет решить задачу предлагаемого изобретения.
Источники информации
1. Патент США 5427328, НКИ 244 - 3.13, 12.02.85.
2. Патент США 3746280, НКИ 244 - 3.13, 17.07.73.
3. Патент США 4111383, НКИ 244 - 3.13, 05.09.78.
4. Патент ФРГ 4137843, МКИ F 41 G 1/38.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2183808C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126522C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205347C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2212619C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2219483C2 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ, УПРАВЛЯЕМЫМ ПО ЛУЧУ ЛАЗЕРА, И ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ СНАРЯДА | 2015 |
|
RU2582308C1 |
| ЛАЗЕРНЫЙ ПРИЦЕЛ-ДАЛЬНОМЕР | 1991 |
|
RU2088883C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| УСТРОЙСТВО ЛУЧЕВОГО НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 2003 |
|
RU2267733C2 |
Изобретение относится к оптическим системам наведения самодвижущихся снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера. Применение указанного технического решения позволяет повысить помехозащищенность систем наведения. Решение технической задачи достигается тем, что в оптическом прицеле системы наведения, содержащем визирный канал и канал наведения, включающий лазерный источник, модулятор и оптику с переменным фокусным расстоянием, в канал наведения между модулятором и оптикой с переменным фокусным расстоянием введена плоскопараллельная пластина с возможностью поворота относительно оси, перпендикулярной оптической оси канала наведения. Кроме того, введены механизм поворота пластины, механически соединенный с осью вращения пластины, схема управления механизмом, формирователь временных интервалов и устройство ввода дальности цели, при этом механизм поворота содержит двигатель, редуктор, передающий вращение вала двигателя на ось вращения пластины, датчик нейтрального положения пластины, соответствующего перпендикулярному относительно оптической оси канала наведения положению пластины и датчик максимального поворота пластины, при этом выходы двух датчиков подключены соответственно к первому и второму входам схемы управления, выход которой подключен к двигателю, а третий вход схемы управления соединен с выходом формирователя временных интервалов, первый вход которого подключен к выходу устройства ввода дальности цели, а второй - к системе запуска управляемого снаряда. 3 з.п.ф-лы, 2 ил.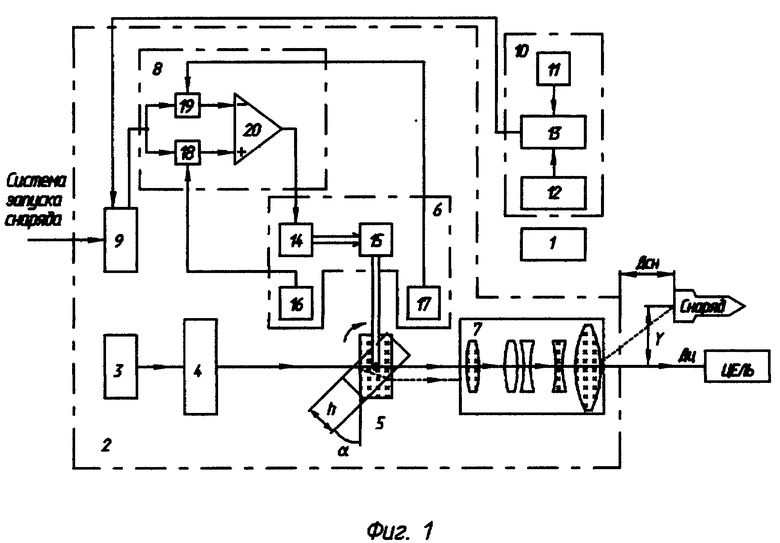
| DE 4137843 A, 19.05.93 | |||
| RU 94045441 A1, 20.10.96 | |||
| US 4702435 A, 27.10.87 | |||
| US 4516743 A, 14.05.85 | |||
| US 4330099 A, 18.05.82 | |||
| US 4238089 A, 09.12.80 | |||
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| ВЕНТИЛЯТОРНАЯ ГРАДИРНЯ КОЧЕТОВА С СИСТЕМОЙ ОБОРОТНОГО ВОДОСНАБЖЕНИЯ | 2015 |
|
RU2607915C1 |
