Изобретение относится к способам стрельбы управляемыми снарядами и может быть использовано в системах наведения (СН) с телеориентацией снаряда в луче лазера.
Одной из задач, решаемых при разработке СН управляемых снарядов, является повышение точности их наведения.
Известны способы стрельбы управляемыми снарядами, использующие метод наведения «по трем точкам» (Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: «Высшая школа», 1976, с. 220), при котором снаряд в процессе полета находится на линии, соединяющей пусковое устройство и цель, т.е. на линии визирования цели (ЛВЦ).
В ряде известных способов используется принцип телеориентации управляемого снаряда в лазерном луче, информационная ось которого совмещена с ЛВЦ. Устройства, реализующие эти способы (патент США 5427328, НКИ 244-3.13, 12.02.85; патент ФРГ 4137843, МКИ F41G 1/38, 19.05.93), содержат визирный канал и канал наведения с лазерным источником излучения, оси которых совмещены, а также модулятор и оптическую систему с переменным фокусным расстоянием, обеспечивающую постоянство линейного размера луча на всех дальностях полета снаряда, начиная с момента начала изменения фокусного расстояния (начала сужения луча). До этого момента луч имеет постоянный начальный угловой размер, а его линейный размер увеличивается пропорционально полетной дальности.
Недостатками этих способов являются:
ухудшение видимости цели и низкая помехозащищенность линии связи вследствие влияния дыма двигателя снаряда на процесс сопровождения цели и наведения снаряда;
высокая вероятность обнаружения комплекса вследствие того, что в процессе полета снаряда центр луча направлен на цель;
полет снаряда в непосредственной близости к подстилающей поверхности (грунт, кустарник), в результате чего существует некоторая вероятность соприкосновения с ней, в особенности на начальном участке наведения для снарядов с низкой начальной скоростью (менее 100 м/с), имеющих большое рассеивание траекторий.
Наиболее близким к предлагаемому является способ стрельбы снарядом, управляемым по лучу лазера (патент RU 2126946, МКИ6 F41G 7/26, 25.11.97), включающий измерение дальности до цели и ввод измеренного значения Dц в наземную систему управления, сравнение измеренной дальности до цели Dц с хранящимся в памяти наземной системы управления значением дальности Dmin, допускающей введение превышения оси луча относительно линии визирования цели, установку превышения при выполнении условия Dц>Dmin, запуск управляемого снаряда, полет снаряда в луче с превышением над линией визирования цели до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с ЛВЦ.
Оптический прицел СН управляемого снаряда (патент RU 2126946, МКИ6 F41G 7/26, 25.11.97), реализующий этот способ, содержит соосно установленные канал визирования цели (КВЦ) и канал наведения (КН) управляемого снаряда, состоящий из оптически сопряженных лазера (Л), модулятора (М), плоскопараллельной пластины (ПП) с механизмом поворота и схемой управления ею (МПСУ) и оптической системы (ОС) с переменным фокусным расстоянием, а также устройство ввода дальности до цели (УВД), выход которого соединен с первым входом формирователя временных интервалов (ФВИ), второй вход которого подключен к системе запуска снаряда, а выход соединен со входом МПСУ.
Согласно этому способу стрельба в режиме с превышением оси луча относительно ЛВЦ может осуществляться на дальность не менее некоторого значения Dmin, которое определяется временем подъема снаряда на превышение и спуском с него. Перед запуском снаряда в электронной схеме прицела производится сравнение измеренной дальности до цели Dц с хранящимся в памяти значением дальности Dmin, допускающей введение превышения. При Dц>Dmin стрельба производится в режиме с превышением, а при Dц≤Dmin - без превышения.
Оптический прицел обеспечивает стрельбу с превышением (подъем луча и последующее его совмещение с ЛВЦ в зависимости от дальности до цели) посредством поворота плоскопараллельной пластины.
Стрельба снарядами с низкой начальной скоростью и последующим разгоном с помощью двигателя характеризуется достаточно длительным переходным процессом. Как известно, время переходного процесса τ в СН при ее аппроксимации апериодическим звеном первого порядка с постоянной времени TCH определяется по зависимости (В.А. Бесекерский, Е.П. Попов. Теория систем автоматического регулирования. М.: «Наука», 1972, с. 71):
τ=3TCH
или с учетом того, что 

Частота среза СН, в свою очередь, связана с аэродинамическими характеристиками снаряда и тем ниже, чем ниже его скорость, что соответственно увеличивает длительность переходного процесса. Эта длительность определяет время подъема на превышение.
Значение Dmin, которое, как указано выше, определяется временем подъема снаряда на превышение и спуском с него, для снарядов с низкой начальной скоростью может составлять 20-25% от максимальной дальности стрельбы. Например, при суммарном времени «подъема-спуска» 6-8 с и средней скорости снаряда на этом участке 150-200 м/с дальность Dmin будет составлять 900-1600 м (далее для примера возьмем значение 1500 м) при максимальной дальности стрельбы снарядами этого класса 5000-6000 м.
Недостатком такого способа является возможное соприкосновение с подстилающей поверхностью на начальном участке наведения при стрельбе без превышения на дальности до цели Dц≤Dmin в условиях наличия ускорения от действия силы тяжести и неблагоприятного сочетания факторов, определяющих рассеивание траекторий (начальных возмущений по углу и угловой скорости продольной оси снаряда, возмущений при включении двигателя и др.).
Задачей предлагаемого изобретения является повышение точности стрельбы в режиме без превышения посредством уменьшения отклонений снаряда ниже ЛВЦ.
Поставленная задача решается за счет того, что по сравнению с известным способом стрельбы снарядом, управляемым по лучу лазера, включающим измерение дальности до цели и ввод измеренного значения Dц в наземную систему управления, сравнение измеренной дальности до цели Dц с хранящимся в памяти наземной системы управления значением дальности Dmin, допускающим введение превышения оси луча относительно линии визирования цели, установку превышения при выполнении условия Dц>Dmin, запуск управляемого снаряда, полет снаряда в луче с превышением над линией визирования цели до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели, новым является то, что в предлагаемом способе при дальности до цели менее дальности Dmin, но более дальности DЭГ, где DЭГ - дальность до снаряда в момент времени 
В реализующем этот способ оптическом прицеле системы наведения управляемого снаряда, содержащем канал визирования цели и канал наведения снаряда, состоящий из оптически сопряженных лазера, модулятора, плоскопараллельной пластины с механизмом поворота и схемой управления ею и оптической системы с переменным фокусным расстоянием, а также устройство ввода дальности до цели, выход которого соединен с первым входом формирователя временных интервалов, второй вход которого подключен к системе запуска снаряда, а выход соединен со входом схемы управления механизмом поворота плоскопараллельной пластиной, новым является то, что он снабжен формирователем электронного смещения, вход которого соединен со вторым выходом формирователя временных интервалов, а выход соединен с первым входом сумматора, второй вход которого соединен с выходом формирователя импульсов, а выход соединен с управляющим входом лазера.
Сущность предлагаемой группы изобретений заключается в том, что помимо двух существующих режимов стрельбы («без превышения» и «с превышением») вводится третий режим - электронного смещения информационного поля луча вверх (т.е. смещение его информационного нуля) на величину YЭГ, именуемый далее режимом «электронная горка», в котором стрельбу осуществляют по целям, расположенным на дальностях DЭГ<Dц≤Dmin. Геометрическое смещение самого луча в этом режиме не производится.
Изобретение поясняется следующими чертежами.
На фиг. 1, 2 представлены траектории снаряда в вертикальной плоскости Yp (сплошной линией) с минимально возможным отклонением от ЛВЦ соответственно в режимах «без превышения» и «электронная горка», где обозначено (помимо указанных выше обозначений): YB - верхняя граница луча; YH - нижняя граница луча (изображены штрихпунктирными линиями). Смещение YЭГ (т.е. собственно «электронная горка») изображено на фиг. 2 штриховой линией.
На фиг. 3 представлена структурная схема прицела наведения управляемого снаряда, где обозначено: 1 - КВЦ, 2 - КН снаряда, 3 - Л, 4 - М, 5 - ПП, 6 - МПСУ, 7 - ОС с переменным фокусным расстоянием, 8 - ФВИ, 9 - УВД до цели, 10 - формирователь электронного смещения (ФЭС), 11 - сумматор (С), 12 - формирователь импульсов (ФИ). Двойной линией обозначена механическая связь.
На фиг. 4 представлена циклограмма работы СН в режиме «электронная горка» в соответствии с предлагаемым способом и реализующим его прицелом.
Время tЭГ соответствует окончанию переходного процесса в СН согласно зависимости (1), которое с учетом возможных разбросов параметров СН устанавливают как:
Например, для снаряда с низкой начальной скоростью частота среза СН может составлять 0,25 Гц (0,25·2πрад/с); при этом tЭГ=1,6…2,2 с. При средней скорости снаряда на этом участке, например 100 м/с, это время будет соответствовать дальности приблизительно 200 м.
При стрельбе в режиме «электронная горка» по истечении этого времени центр информационного поля совмещен с ЛВЦ. Подъем информационного нуля производится до времени tM, которое составляет приблизительно треть от времени tЭГ, после чего осуществляется плавный спуск до нуля.
Стрельба в режиме «электронная горка» (фиг. 2) позволяет уменьшить отклонение снаряда вниз, которое может возникать при стрельбе в режиме «без превышения» (фиг. 1).
Таким образом, стрельба согласно предлагаемому способу будет осуществляться:
в режиме «без превышения» при дальности до цели менее DЭГ (в нашем примере до 200 м);
в режиме «электронная горка» при дальности до цели DЭГ<Dц≤Dmin (в нашем примере от 200 м до 1500 м);
в режиме «с превышением» при дальности до цели более Dmin (в нашем примере свыше 1500 м).
Оптический прицел СН управляемого снаряда (фиг. 3) работает следующим образом.
КВЦ 1 и КН 2 соосно совмещены. В исходном состоянии ПП 5 находится в нейтральном положении. Оператор наводит ось КВЦ 1 на выбранную цель и вводит дальность до цели в УВД 9 (с помощью дальномера или вручную).
Данные о дальности поступают на первый вход ФВИ 8, где происходит сравнение данных о дальности с табличными значениями, определяющими один из режимов работы:
«без превышения» и без смещения информационного центра поля управления;
с формированием смещения информационного центра поля управления («электронная горка»);
со смещением всего поля управления («с превышением»).
Сигнал с системы запуска снаряда обеспечивает отсчет по времени с момента пуска.
В режиме «без превышения» и «с превышением» прицел работает аналогично прототипу.
В режиме «без превышения» центр луча, информационный центр поля наведения и ЛВЦ совмещены в течение всего полета снаряда. На обоих выходах ФВИ 8 формируется нулевой сигнал.
В режиме «с превышением» на первом выходе ФВИ 8 формируется сигнал, поступающий на МПСУ 6, и ПП 5 поворачивается на максимальный угол поворота. На втором выходе ФВИ 8 формируется нулевой сигнал.
При этом луч наведения, формируемый Л 3, М 4, ОС 7, смещается вверх относительно линии визирования на необходимую величину благодаря повороту ПП 5. После выстрела ФВИ 8 снимает сигнал на своем первом выходе (в зависимости от дальности до цели) и под действием этого сигнала ПП 5 приходит в нейтральное положение. Непосредственно перед подлетом к цели снаряд летит в совмещенном с ЛВЦ центре поля наведения.
В режиме «электронная горка» при выстреле на первом выходе ФВИ 8 формируется нулевой сигнал, а на втором его выходе - единичный (фиг. 4).
На выходе ФЭС 10 формируется сигнал, который, суммируясь на С 11 с сигналом с ФИ 12, поступает на управляющий вход Л 3. Под действием этого сигнала лазер формирует импульсы накачки, обеспечивающие необходимое смещение информационного поля управления относительно центра луча наведения в соответствии с предлагаемым способом. Снаряд летит над ЛВЦ в течение времени tЭГ, а перед встречей с целью опускается на ЛВЦ.
КВЦ 1, ПП 5 с МПСУ 6, ОС 7 с переменным фокусным расстоянием и УВД 9 могут быть реализованы, как в прототипе. ФВИ 8, ФЭС 10, С 11 и электронная часть остальных блоков могут быть выполнены на любом известном микропроцессоре, например STM32.
Л 3, М 4 и ФИ 12 могут быть выполнены, например, как в патенте №2150073 от 07.06.1999 г., где информационный центр поля наведения определяется частотой (интервалом между импульсами накачки лазеров) посылок управляющих сигналов, поступающих на входы лазеров и формируемых формирователем импульсов. При этом параметры этих сигналов (смещение информационного поля наведения) формируются как в данном прототипе или со смещением, определяемым сигналом, поступающим с ФЭС 10.
Частота посылок, формируемых ФИ, соответствует координатным интервалам, определяемым формулой

где Т - период сканирования;
Т0 - опорное значение интервалов между посылками, соответствующее нулевым координатам;
ΔT - максимальное отклонение интервалов между посылками, соответствующее краю формируемого поля (луча);
t - текущее время на интервале формирования координаты.
Для смещения информационного центра относительно центра луча наведения под действием внешнего сигнала с выхода ФЭС 10 генерируются импульсы вместо зависимости (2) в соответствии с формулой

где K(tп) - изменение длительности интервала Т0, определяющей величину смещения информационного центра поля управления в зависимости от времени полета tп и соответствующей отклонению YЭГ. При K(tп)=0 информационный центр поля наведения совмещен с центром луча наведения (при нулевом сигнале с ФЭС 10).
Применение предлагаемого способа стрельбы снарядами, управляемыми по лучу лазера, и реализующего его оптического прицела позволяет повысить точность наведения на начальном участке полета при стрельбе без превышения за счет подъема траектории снаряда посредством смещения центра информационного поля луча вверх без смещения самого луча.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ РАКЕТОЙ, УПРАВЛЯЕМОЙ ПО ЛУЧУ ЛАЗЕРА | 2012 |
|
RU2516383C1 |
| Способ стрельбы ракетой, управляемой по лучу лазера | 2018 |
|
RU2702458C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205347C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2219483C2 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО РЕАКТИВНОГО СНАРЯДА | 2019 |
|
RU2746340C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126946C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2212619C2 |
Группа изобретений относится к области систем наведения снарядов. Способ стрельбы снарядом, управляемым по лучу лазера, включает измерение дальности до цели и ввод измеренного значения Dц в наземную систему управления, сравнение измеренной дальности до цели Dц с хранящимся в памяти наземной системы управления значением дальности Dmin, допускающим введение превышения оси луча относительно линии визирования цели, установку превышения при выполнении условия Dц>Dmin, запуск управляемого снаряда, полет снаряда в луче с превышением над линией визирования цели до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели. При этом при дальности до цели менее дальности Dmin, но более дальности DЭГ, где DЭГ - дальность до снаряда в момент времени  ; ωср - частота среза системы управления снарядом, рад/с, центр информационного поля луча в течение времени от запуска снаряда до момента времени tM, где
; ωср - частота среза системы управления снарядом, рад/с, центр информационного поля луча в течение времени от запуска снаряда до момента времени tM, где  , смещают вверх относительно оси луча на величину YЭГ=(0,2…0,5)RЛ, где RЛ - радиус луча, после чего их совмещают в течение времени от момента tM до момента tЭГ, а при дальности до цели менее дальности DЭГ стрельбу производят без смещения центра информационного поля луча. Устройство для реализации способа снабжено формирователем электронного смещения, вход которого соединен с выходом формирователя временных интервалов, а выход соединен с первым входом сумматора. Технический результат заключается в обеспечении возможности исключения соприкосновения снаряда с подстилающей поверхностью. 2 н.п. ф-лы, 4 ил.
, смещают вверх относительно оси луча на величину YЭГ=(0,2…0,5)RЛ, где RЛ - радиус луча, после чего их совмещают в течение времени от момента tM до момента tЭГ, а при дальности до цели менее дальности DЭГ стрельбу производят без смещения центра информационного поля луча. Устройство для реализации способа снабжено формирователем электронного смещения, вход которого соединен с выходом формирователя временных интервалов, а выход соединен с первым входом сумматора. Технический результат заключается в обеспечении возможности исключения соприкосновения снаряда с подстилающей поверхностью. 2 н.п. ф-лы, 4 ил.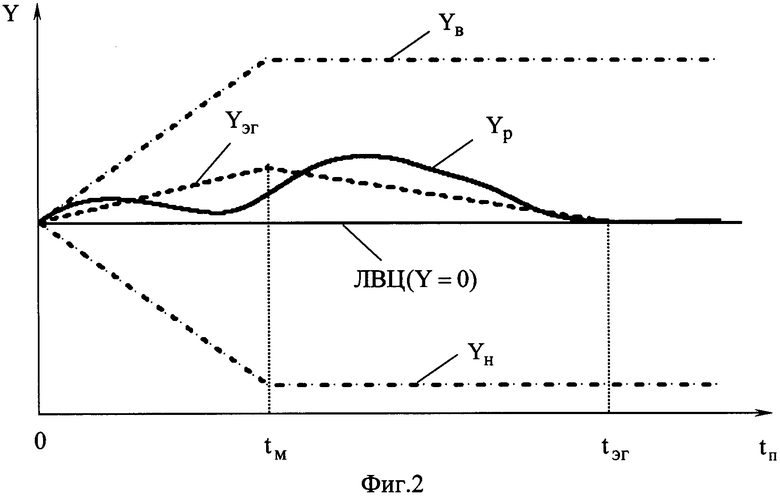
1. Способ стрельбы снарядом, управляемым по лучу лазера, включающий измерение дальности до цели и ввод измеренного значения Dц в наземную систему управления, сравнение измеренной дальности до цели Dц с хранящимся в памяти наземной системы управления значением дальности Dmin, допускающим введение превышения оси луча относительно линии визирования цели, установку превышения при выполнении условия Dц > Dmin, запуск управляемого снаряда, полет снаряда в луче с превышением над линией визирования цели до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели, отличающийся тем, что при дальности до цели менее дальности Dmin, но более дальности Dэг, где Dэг - дальность до снаряда в момент времени  ; ωср - частота среза системы управления снаряда, рад/с, центр информационного поля луча в течение времени от запуска снаряда до момента времени tм, где
; ωср - частота среза системы управления снаряда, рад/с, центр информационного поля луча в течение времени от запуска снаряда до момента времени tм, где  , смещают вверх относительно оси луча на величину Yэг=(0,2…0,5)Rл, где Rл - радиус луча, после чего их совмещают в течение времени от момента tм до момента tэг, а при дальности до цели менее дальности Dэг стрельбу производят без смещения центра информационного поля луча.
, смещают вверх относительно оси луча на величину Yэг=(0,2…0,5)Rл, где Rл - радиус луча, после чего их совмещают в течение времени от момента tм до момента tэг, а при дальности до цели менее дальности Dэг стрельбу производят без смещения центра информационного поля луча.
2. Оптический прицел системы наведения управляемого снаряда, содержащий канал визирования цели и канал наведения снаряда, состоящий из оптически сопряженных лазера, модулятора, плоскопараллельной пластины с механизмом поворота и схемой управления ею и оптической системы с переменным фокусным расстоянием, а также устройство ввода дальности до цели, выход которого соединен с первым входом формирователя временных интервалов, второй вход которого подключен к системе запуска снаряда, а выход соединен со входом схемы управления механизмом поворота плоскопараллельной пластиной, отличающийся тем, что он снабжен формирователем электронного смещения, вход которого соединен со вторым выходом формирователя временных интервалов, а выход соединен с первым входом сумматора, второй вход которого соединен с выходом формирователя импульсов, а выход соединен с управляющим входом лазера.
| СПОСОБ СТРЕЛЬБЫ РАКЕТОЙ, УПРАВЛЯЕМОЙ ПО ЛУЧУ ЛАЗЕРА | 2012 |
|
RU2516383C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ И ОПТИКО-ЭЛЕКТРОННАЯ КОМАНДНАЯ СИСТЕМА НАВЕДЕНИЯ | 2005 |
|
RU2288424C1 |
| US 4020407 A1, 26.04.1977.. | |||

