Изобретение относится к области разработки системы наведения управляемого по лазерному лучу объекта (ракеты, снаряда и т.д.) повышенной дальности действия и может быть использовано в носимых комплексах, а также установлено на сухопутных и воздушных носителях.
Известны устройства наведения, использующие принцип ориентации управляемого по лазерному лучу объекта, информационная ось которого совмещена с линией визирования, причем фотоприемное устройство, преобразующее лазерное излучение информационного поля в электрический сигнал, поступающий на рули управления ракетой, расположено в хвостовой части [1].
Основной проблемой, возникающей в таких устройствах, является пониженная помехозащищенность и недостаточно высокая поражающая способность при попадании ракеты в лобовую (наиболее защищенную) часть цели.
Известны устройства лучевого наведения управляемого объекта в режиме лазерного целеуказания, когда цель подсвечивается лазерным излучением, а управляемый объект наводится на цель по отраженному от нее излучению, которое принимается фотоприемным устройством, расположенным в головной (лобовой) части объекта [2].
Несмотря на высокую поражающую способность (атака сверху, под углом к лобовой проекции), в режиме лазерного целеуказания существует вероятность потери управления ракеты из-за возможного незахвата отраженного от цели излучения, при этом данное устройство не позволяет проводить перенацеливание ракеты (снаряда).
Помехоустойчивость линии связи «цель - визирный канал» и «лучевой канал наведения - фотоприемное устройство» снижается вследствие попадания на линию визирования дыма от двигателя, установленного на управляемом объекте, что может привести как к срыву управления, так и потере видимости цели, которая рассматривается оператором в визирный канал. Скрытность систем наведения, фотоприемное устройство которых находится в хвостовой части, пропадает в случае наличия на объектах-целях высокочувствительных детекторов лазерного излучения. Кроме этого, наложение лазерного излучения на цель в течение довольно длительного времени позволяет противнику применять активные помехи.
Устройство аналогов систем наведения управляемого по лучу объекта [3] содержит визирный канал и канал наведения, включающий в себя лазерный источник излучения, модулятор и оптическую систему с переменным фокусным расстоянием, обеспечивающую постоянство геометрических размеров информационного поля промодулированного лазерного излучения на всех дальностях действия управляемого объекта [1, 3]. В устройствах лучевого управления, работающих в режиме лазерного целеуказания, канал наведения включает в себя импульсно-периодический лазер, работающий в моноимпульсном режиме с высокой частотой посылки импульсов излучения, и оптическую систему для получения высоконаправленного излучения [2].
Наиболее близким по технической сущности к предлагаемому изобретению является оптический прицел системы лучевого наведения [4], состоящий из визирного канала и канала наведения управляемого снаряда, состоящий из оптически сопряженных непрерывного лазера и модулятора лазерного излучения, оптической системы с переменным фокусным расстоянием. Между модулятором и оптической системой с переменным фокусным расстоянием введена плоскопараллельная пластина в качестве механизма превышения с возможностью ее поворота относительно оси, перпендикулярной оптической оси канала наведения. В результате этого повышается помехозащищенность системы, так как введенная пластина при помощи поворотного механизма поворачивается на определенный угол, что приводит к приподнятию оптической оси канала наведения относительно линии визирования цели, что тем самым освобождает оптическую линию связи от дыма двигателя снаряда и значительно снижает возможность детектирования лазерного излучения.
Указанные системы не позволяют обеспечить повышенную дальность действия и высокую поражающую способность с одновременным обеспечением возможности перенацеливания управляемого объекта без усложнения конструкции системы наведения и увеличения ее весогабаритных размеров.
Техническим результатом изобретения является возможность перенацеливания управляемой по лазерному лучу ракеты, в том числе и на конечной стадии полета, повышенная дальность действия и высокая поражающая способность, а также уменьшение весогабаритных характеристик заявляемого устройства.
Технический результат достигается также тем, что в устройстве для лучевого наведения управляемого объекта, содержащем передающий и приемный каналы, систему развертки и сканирования луча, механизм превышения, оптическую систему с переменным фокусным расстоянием, передающий канал выполнен в виде двухрежимного импульсно-периодического лазера, работающего в режиме свободной генерации для лучевого наведения и моноимпульсном режиме для лазерного целеуказания и дальнометрирования, причем между оптической системой с переменным фокусным расстоянием и механизмом превышения введен поляризационный кубик. Введение двух взаимно перпендикулярных поляризаторов, полуволнового электрооптического затвора и полупрозрачного выходного зеркала обеспечивает возможность работы лазера и в моноимпульсном режим работы, необходимом для режима целеуказания.
Введение поляризационного кубика обеспечивает возможность использования оптической системы с переменным фокусным расстоянием как составной части приемного канала для работы в режиме дальнометрирования.
На фиг.1 приведена схема устройства для лучевого наведения.
На фиг.2 приведена схема визирования на управляемый объект в режиме лучевого наведения и лазерного целеуказания.
Устройство для лучевого наведения содержит визирный канал 1 (см. фиг.1), приемный канал 2, измеритель временных интервалов 3, импульсный твердотельный лазер 4, устройство V-образной развертки излучения на базе двух цилиндрических линз со скрещенными осями кривизны 5, сканирующую призму 6, поворотную призму 7, телескопическую систему реверса направления 8, поляризационный кубик 9, механизм превышения 10, оптическую систему с переменным фокусным расстоянием 11.
Импульсный твердотельный лазер 4 состоит из активного элемента 13 с устройством теплоотвода, двух резонаторов, образованных 100% отражающим («глухим») зеркалом 14 и полупрозрачными зеркалами 15 и 16, двух взаимно перпендикулярных поляризаторов 17, полуволнового электрооптического затвора 18, лампы накачки 19 и блока питания 20.
Представленное устройство наведения 22 (см. фиг.2) работает следующим образом.
Оператор наводит ось визирного канала 1 на выбранную цель 23 (см. фиг.2) лазерным дальномером, состоящим из твердотельного лазера 4, приемного канала 2, измерителя временных интервалов 3, измеряет дальность как в режиме одиночных импульсов, так и в повторяющихся - в случае высокомобильной цели.
При работе в режиме дальнометрирования и лазерного целеуказания в результате накачки активного элемента 13 излучением лампы 19 в лазере 4 начинается генерация излучения, поляризованного в плоскости рисунка. При подаче на управляемую фазовую пластину 21 полуволнового напряжения поляризация излучения на ее выходе поворачивается на 90 градусов и, отразившись от двух взаимно перпендикулярных поляризаторов 17, поступает на электрооптический затвор (ЭОЗ) 18, на который подано постоянное четвертьволновое напряжение. Отразившись от выходного зеркала 14 и повторно проходя через ЭОЗ 18, плоскость поляризации излучения поворачивается на 90 градусов и выводится через один из поляризаторов. Это соответствует состоянию, когда электрооптический затвор 18 закрыт. При этом в активном элементе идет накопление инверсной населенности. При подаче на электрооптический затвор 18 динамического полуволнового напряжения в резонаторе, образованном выходным зеркалом 14 и «глухим» зеркалом 16, возникает моноимпульсное излучение с направлением поляризации, перпендикулярным плоскости рисунка, которое через поляризационный кубик 9 направляется на телескопическую систему, механизм превышения 10 и далее на объект. Отразившись от цели, излучение фокусируется оптикой приемного канала 2 на фотоприемном устройстве, выходной сигнал с которого поступает на измеритель временных интервалов 3. Значение измеренной дальности подается на внешнее вычислительное устройство (процессор) для формирования команд для механизма превышения 10. Одновременно отраженное от цели закодированное (фиксированная частота посылки импульсов) излучение может попадать в поле зрения приемного канала фотоприемного устройства, расположенного в головной части управляемого объекта. В результате чего управляемый объект 24 (см. фиг.2) может наводиться по отраженному лучу.
Работа устройства в режиме лучевого наведения.
Луч излучения импульсно-периодического лазера, работающего в режиме свободной генерации и состоящего из активного элемента 13 и лампы накачки 19, через выходное полупрозрачное зеркало 15 проходит через две цилиндрические линзы 5 и приобретает V-образную форму в поперечном сечении. Сформированный таким образом луч, отразившись от вращающейся призмы 6, осуществляет однонаправленное сканирование. Телескопическая система 8 осуществляет реверс направления сканирования и обеспечивает линейное возвратно-поступательное сканирование луча. Поляризованное в вертикальной плоскости и V-образно развернутое излучение проходит без потерь через поляризационный кубик 9 и направляется на механизм превышения 10 для приподнятия оптической оси канала наведения относительно линии визирования цели, что аналогично [4] повышает помехозащищенность и снижает возможность детектирования лазерного излучения. В результате в пространстве формируется зона управления V-образным лучом, что обеспечивает ориентацию в этой зоне управляемого объекта (снаряда, ракеты и т.д.), оснащенного фотоприемным устройством, установленным в его хвостовой части. Оптическая система 11 с переменным фокусным расстоянием обеспечивает постоянство геометрических размеров информационного поля промодулированного лазерного излучения на всех дальностях действия управляемого объекта.
При постановке целью активных и пассивных помех или при ее высокой мобильности устройство по команде может перейти в режим лазерного целеуказания.
Источники информации
1. Патент США 5427328, НКИ 244-3.13, 12.02.85.
2. Патент США 4111383, НКИ 244-3.13, 05.09.78.
3. Р.А.Налк и др. «Разработка полуактивной ракеты лазерной системы наведения снаряда «Коперхед» // Ракетная техника и космонавтика, - 1980. - №2. - С.128-137.
4. Патент РФ №2126946, МКИ 6 F 41 G 7/26, 25.11.97.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2014 |
|
RU2541494C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126946C1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2011 |
|
RU2464601C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2122699C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
| СИСТЕМА ПАССИВНОГО ДАЛЬНОМЕТРИРОВАНИЯ ОБЪЕКТОВ В УПРАВЛЯЕМЫХ БОЕПРИПАСАХ | 2004 |
|
RU2295103C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
| КОМБИНИРОВАННЫЙ ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 2008 |
|
RU2375665C2 |

Изобретение относится к системам наведения снарядов, в частности по лазерному лучу. Сущность изобретения заключается в том, что передающий канал устройства наведения выполнен в виде двухрежимного импульсно-периодического лазера. Лазер работает в режиме свободной генерации для лучевого наведения и моноимпульсном режиме для лазерного целеуказания и дальнометрирования. Между оптической системой с переменным фокусным расстоянием и механизмом превышения введен поляризационный кубик. Реализация изобретения позволяет повысить помехозащищенность снаряда за счет независимого использования каналов лучевого наведения и лазерного целеуказания. 1 з.п. ф-лы, 2 ил.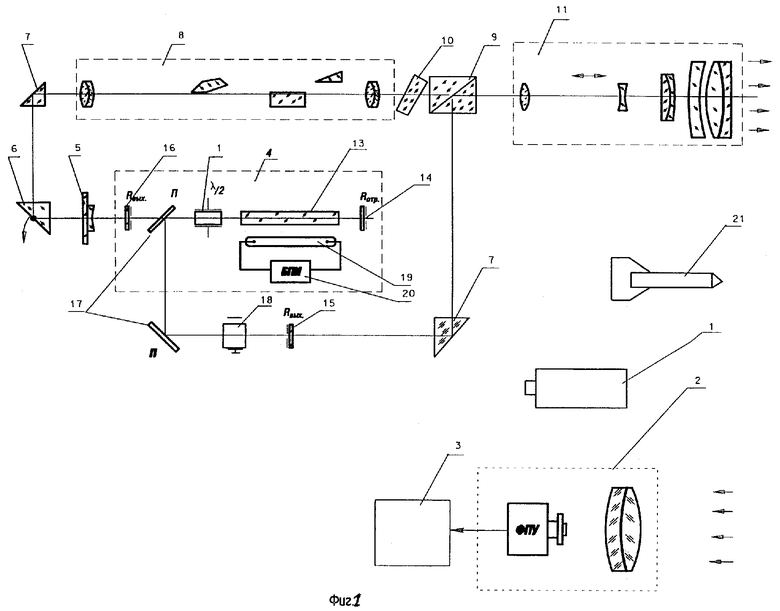
| СЫЧЕВ В.А | |||
| «Корабельное оружие», Москва, изд | |||
| ДОСААФ СССР, 1984, с | |||
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126946C1 |
| ОПТИКО-ЛАЗЕРНАЯ СИСТЕМА ДЛЯ ПРИЦЕЛИВАНИЯ И ДАЛЬНОМЕТРИРОВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2123165C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2126946C1 |
| Дозатор жидкости | 1986 |
|
SU1408230A1 |
| US 6565036 A.20.05.2003 | |||
| Способ моноимпульсного измерения радиальной скорости объектов | 2022 |
|
RU2799002C1 |
| DE 19736305 А1, 04.03.1999. | |||

