Изобретение относится к лесному хозяйству и может быть использовано для трелевки деревьев с использованием летательного аппарата, преимущественно вертолета, и может быть использовано при лесозаготовительных работах в труднодоступных и отдаленных районах и в гористой местности с крутыми склонами.
Из уровня техники известен способ вертолетной трелевки поваленных деревьев, включающий зависание вертолета, зачаливание древесных стволов посредством захватного устройства, подвешенного к вертолету, их подъем и транспортировку (см. патент РФ 2067818, кл. A 01 G 23/08, 1996 г.). Основным недостатком вертолетной трелевки является наличие мощных воздушных потоков, создаваемых несущим винтом вертолета, которые оказывают существенное разрушающее воздействие на произрастающую флору и почвенный покров и затрудняют процесс пилотирования.
Известно подвесное захватное устройство для трелевки деревьев, содержащее захват, прикрепленный к тросу, который закреплен на воздушном транспортном средстве (см.патент РФ 2044458, кл. A 01 G 23/02, 1995 г., патент РФ 2067818, кл. A 01 G 23/08, 1996 г.).
Однако конструктивная сложность известных захватных устройств снижает безопасность трелевки, особенно при использовании вертолета.
Наиболее близким к изобретению является подвесное захватное устройство, содержащее рычажный захват, прикрепленный к тросу, и средство изменения ориентации, которое имеет два симметрично установленных движителя (двигателя) (см.патент США 4802517, кл. 144 - 34, 1989 г.). Наличие средства изменения ориентации захвата упрощает управление процессом захватывания и трелевки деревьев, но взаимное расположение рычагов захвата и сопел двигателей с воздушно- или гидрореактивной тягой ограничивает функциональные возможности данного устройства.
Изобретение направлено на повышение безопасности и расширение функциональных возможностей вертолетной трелевки поваленных деревьев, как предварительно разделанных (раскряжеванных на сортилленты), так и неразделанных, при достаточной простоте подвесного захватного устройства и существенном уменьшении разрушающего аэродинамического воздействия создаваемых несущим винтом (винтами) вертолета воздушных потоков на произрастающую в зоне трелевки растительность и почвенный покров в различных природноклиматических и рельефных условиях. Решение поставленной задачи обеспечивается тем, что в способе трелевки деревьев с использованием летательного аппарата, включающем зависание вертолета, зачаливание древесных стволов посредством захватного устройства, подвешенного на тросе к вертолету, их подъем и транспортировку, согласно изобретению, длина троса составляет 0,5-15,0 диаметра несущего винта.
Кроме того, согласно изобретению, подвесное к летательному аппарату захватное устройство для трелевки деревьев, содержащее рычажный захват (например, в виде клещей, снабженных приводом), прикрепленный к тросу, причем ось вращения рычагов захвата размещена горизонтально-перпендикулярно относительно троса, снабжено смонтированным на рычагах захвата средством изменения ориентации захвата, которое содержит два симметрично установленных и противоположно направленных воздушных вентилятора, образующих пару сил, продольные оси которых лежат в горизонтальной плоскости параллельно оси вращения рычагов захвата.
Предпочтительно, чтобы воздушные вентиляторы средства изменения ориентации захвата, образующие пару сил, были выполнены реверсивными. Кроме того, средство изменения ориентации захвата дополнительно содержит еще два воздушных вентилятора, образующих дополнительную пару сил с противоположным направлением момента вращения.
Заявленное соотношение длины троса, на котором подвешено к вертолету захватное устройство, и диаметра несущего винта (винтов) вертолета, является оптимальным для безопасности вертолетной трелевки поваленных деревьев в различных природно-климатических и рельефных условиях при любом известном конструктивном выполнении захвата (в виде клещей, строповых, чекерных, петлевых и т.п.), и выявлено в результате многочисленных модельных стендовых и натурных летных испытаний. При этом верхняя и нижняя границы соотношения L/D = 0,5-15,0, (где L - длина троса; D - диаметр несущего винта вертолета) обусловлены влиянием сочетания различных факторов: высотой столба аэродинамического воздействия, возникающего под корпусом вертолета в момент зависания, надежностью управления, видимостью, обзором и другими условиями безопасного пилотирования, сортностью леса (высотой и загущенностью крон деревьев, разветвленностью корневой системы, наличием и качественным составом ценных и редких пород кустарника, подлеска и прочей флоры, что особенно важно при селективной заготовке древесины), структурой и состоянием почвы, рельефом местности, метеорологическими условиями и т.д., что и обеспечивает высокую экологическую и экономическую оправданность вертолетной трелевки, надежность и безопасность полетов.
Кроме того, заявленное расположение относительно рычагов захвата двигателей (движителей) средства изменения ориентации захвата и их выполнение в виде воздушных вентиляторов, предпочтительно реверсивных, позволяет разворачивать захват и изменять его положение в горизонтальной плоскости с вертолета, что расширяет функциональные возможности, повышает производительность трелевочных работ и надежность безопасного пилотирования как при зачаливании деревьев, так и при транспортировке древесных стволов.
На чертеже представлен общий вид подвесного к летательному аппарату захватного устройства для вертолетной трелевки.
Захватное устройство содержит рычажный захват 1, выполненный в виде клещей 2 с горизонтально расположенной осью вращения, который снабжен гидравлическим приводом 3, трос 4 и вертолет 5. При этом длина L троса 4 (расстояние между точками 6 и 7 закрепления троса 4 соответственно к корпусу вертолета 5 и захвату 1) составляет L = (0,5-15,0)D, где D - диаметр несущего винта (винтов) 8 вертолета 5. На захвате 1 для изменения его ориентации симметрично относительно точки 7 закрепления троса 4 установлены противоположно направленные воздушные вентиляторы 9, выполненные предпочтительно реверсивными, продольные оси которых лежат параллельно оси вращения рычагов-клещей 2 в горизонтальной плоскости (с образованием пары сил относительно троса 4 в перпендикулярной к нему плоскости).
Вертолетная трелевка с использованием подвесного захватного устройства осуществляется следующим образом.
Вертолет 5 зависает над местом проведения лесозаготовительных работ, и пилот, управляя захватом 1 с борта вертолета 5, производит зачаливание поваленных деревьев (стволы которых при необходимости могут быть очищены от сучьев и раскряжеваны). При этом ориентация захвата 1 осуществляется посредством создающих воздушно-реактивную тягу воздушных вентиляторов 9, образующих пару сил в горизонтальной плоскости, а изменение направления разворота захвата 1 производится путем реверса упомянутых воздушных вентиляторов 9 или за счет работы дополнительных воздушных вентиляторов (на чертеже не показано), образующих пару сил с противоположным направлением момента вращения. Затем вертолет 5 с закрепленными древесными стволами поднимается на заданную высоту и транспортирует их для разгрузки в пункт назначения. Относительная длина (L/D) троса 4 выбирается в пределах, соответствующих изобретению, с учетом конкретных условий и может быть изменена в заявленном диапазоне при составлении полетного задания в зависимости от вышеупомянутых факторов, учитывающих как конструктивные особенности летательного аппарата (вертолета), так и метеорологические, климатические, биологические условия, геологические особенности ландшафта и т.д.
В случае необходимости управление захватом 1 может производиться и/или корректироваться наземным обслуживающим персоналом.
Предложенный способ вертолетной трелевки с использованием заявленного подвесного захватывающего устройства наиболее эффективен для трелевки поваленных деревьев в труднодоступных и отдаленных местах, а также при освоении горных лесосек с крутыми склонами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЕРТОЛЕТНОЙ ТРЕЛЕВКИ ПОВАЛЕННЫХ ДЕРЕВЬЕВ | 1996 |
|
RU2095288C1 |
| СПОСОБ ЗАГОТОВКИ ДРЕВЕСИНЫ | 1995 |
|
RU2096948C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2000 |
|
RU2190321C2 |
| СУЧКОРЕЗНО-РАСКРЯЖЕВОЧНАЯ ТРЕЛЕВОЧНАЯ МАШИНА | 2000 |
|
RU2175186C1 |
| ПОДВЕСНОЕ ЛЕСОЗАГОТОВИТЕЛЬНОЕ УСТРОЙСТВО | 1992 |
|
RU2044458C1 |
| ВЕРТОЛЕТ-КОНВЕРТОПЛАН | 2004 |
|
RU2277497C1 |
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 1994 |
|
RU2089456C1 |
| УСТАНОВКА ДЛЯ ВОЗДУШНОЙ ТРЕЛЕВКИ ЛЕСА | 1988 |
|
RU2049716C1 |
| ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1972 |
|
SU426951A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНОЕ УСТРОЙСТВО | 1994 |
|
RU2067818C1 |
Изобретение относится к лесному хозяйству и может быть использовано при лесозаготовительных работах в труднодоступных и отдаленных районах и в гористой местности с крутыми склонами. Сущность изобретения заключается в том, что при вертолетной трелевке с использованием захвата, подвешенного к вертолету на тросе, длина последнего выбирается из соотношения L=(0,5 -15,0)D, где D - длина троса, L - диаметр несущего винта вертолета. При этом подвесное к летательному аппарату захватное устройство содержит захват, прикрепленный к тросу. Захват имеет горизонтально расположенную ось вращения рычагов (клещей) и снабжен средством изменения ориентации. Средство изменения ориентации выполнено в виде противоположно направленных воздушных вентиляторов, образующих пару сил, продольные оси которых лежат в горизонтальной плоскости параллельно оси вращения рычагов захвата. Изобретение позволит повысить безопастность и расширить функциональные возможности вертолетной трелевки поваленных деревьев, как предварительно разделанных (раскряжеванных на сортименты), так и неразделанных, при простоте подвесного захватного устройства и существенном уменьшении разрушающего аэродинамического воздействия, создаваемых несущим винтом (винтами) вертолета воздушных потоков, на произрастающую в зоне трелевки растительность и почвенный покров в различных условиях. 2 с. и 2 з.п. ф-лы, 1 ил.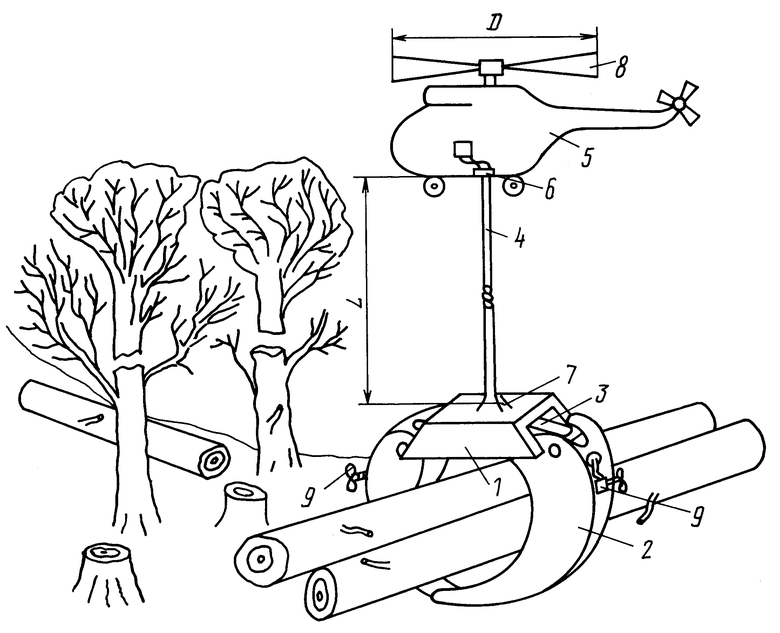
| US 4802517, 07.02.89 | |||
| US 4152019, 01.05.79 | |||
| ПОДВЕСНОЕ ЛЕСОЗАГОТОВИТЕЛЬНОЕ УСТРОЙСТВО | 1992 |
|
RU2044458C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНОЕ УСТРОЙСТВО | 1994 |
|
RU2067818C1 |

