Изобретение относится к за.хватам штучных грузов и может быть использовано в лесной промышленности, например в канатнотрелевочных установках для полуподвесной бесчокерной трелевки леса.
Известны захваты штучных грузов, включающие лодвлжно установленную на подвесных направляющих тележку, онабл енную поворотной в горизонтальной плоскости траверсой с крюками, расположенными в параллельных плоскостях зевами один навстречу другому, привод поворота траверсы и запирающее устройство.
Однако такие захваты не обеспечивают бесчокерной трелевки леса, например, в горпой местности и автоматической отцепки его в требуемом месте.
Цель изобретения - устранение этих недостатков.
Для этого захват подвешен на две направляющие, выполненные в виде тягово-несущего каната, на его тяговой ветви закреплен привод поворота траверсы в виде холостой и рабочей бобышек, .последняя из которых установлена с возможностью взаимодействия в процессе работы с муфтой запирающего устройства, соединенной тросом с храповым механизмом, смонтированным на тележке захвата. С целью обеспечения подвески траверсы к тяговой ветви тягово-иесущего каната с двумя степенями свободы траверса соединена с тележкой при помощи вертлюга. Причем траверса имеет в плане Z-образную форму, а внутренняя поверхность зевов крюков выполнена зубчатой.
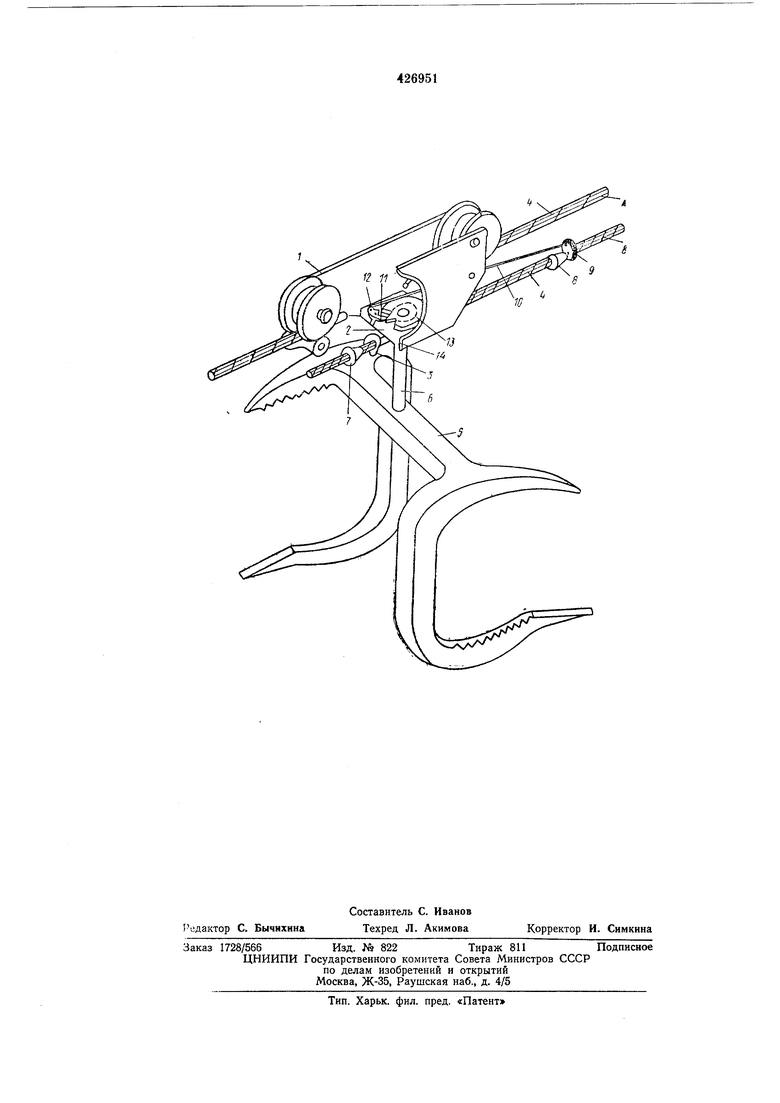
На чертеже изображен предотагаемый захват для штучных грузов, общий вид.
Захват, состоящий из ходовой тележки 1 имеющей кронштейн 2 н вертлюг 3, подвешен на ветви Л и В тягово-несущего каната 4. Траверса 5 жестко соединена с осью 6, верхний конец которой шарнирно сочленен с кронштейном 2. Через отверстие вертлюга 3 пропущена ветвь В тягово-песущего каната 4, на которой закреплены холостая 7 и рабочая 8 бобышки и свободно перемещаемая муфта 9, связанная тросиком 10 с двуплечим рычагом собачки 11, вращающейся на оси 12. На оси 6 закреплепо храповое колесо 13, в зацепление с которым может входить двуплечий рычаг собачки 11, прижи.мающийся к храповому колесу 13 пружиной 14.
Захват работает следующим образом. Приводом тягово-несущего каната 4 оператор производит его натяжение, при этом ветвь А на.матьгвается, например, на барабан, а ветвь В вытравливается. Холостая бобышка 7, упираясь в вертлюг , обеспечивает при движении захвата в лесосеку к поваленным деревьям такое положение траверсы 5, при котором зевы крюков параллельны плоскости движения .канатов. (Рабочая бобышка 8, упираясь в .муфту 9, Натягивает тросик 10, при этом двуплечий рычаг собачки Л выведен из зацепления с храповым колесом .13. Оператор ориентирует захват над предназначенным к трелевке хлыстом и ослабляет натяжение тягово-несущего каната 4, сажает траверсу 5 на ствол хлыста, натяжение тросика 10 ослабляется, И двуплечий рычаг собачки 11, повернувшись под действием пружины 14 на оси 12, войдет в зацепление с храповым колесом 13.
Убедившись, что траверса 5 насажена на ствол хлыста, оператор производит натяжение тягово-несуш;его каната 4, при этом ветвь А вытравливается, а ветвь В наматывается. Рабочая бобышка 8, упираясь в вертлюг 3, поворачивает траверсу 5 вокруг оси 6. Происходит захват ствола хлыста, двуплечий рычаг собачки till скользит по .проворачивающемуся храповому колесу 13 до -полного захвата и стопорится, захваченная часть хлыста (вершина или комель) под действием натяжения тягово-.несуш;его каната 4 поднимается над поверхностью земли, и хлыст в полуподвешенном состоянии трелюется к подножию склона. У площадки складирования оператор ослабляет .натяжение тягово-иесущего каната, включает реверс - ветвь Л начинает наматываться, а ветвь В вытравливается. Рабочая бобышка 8 упирается в вертлюг 5 и поворачивает траверсу 5 в прежнее положение. Хлыст
освобождается из зевов крюков. Затем цикл повторяется.
Предмет изобретения
1. Захват для штучных грузов, включающий .подвижно установленную на подвесных направляющих тележку, снабженную поворотной в горизонтальной плоскости траверсой с крюками, расположенными в параллельных
плоскостях зевами один навстречу другому, привод поворота траверсы и запирающее устройство, отличающийся тем, что, с целью обеспечения бесчокерной трелевки леса, например, в горной местности и автоматической
отцепки его в требуемом месте, захват подвещен на две направляющие, выполненные в виде тягово-несущего каната, на его тяговой ветви закреплен привод поворота траверсы в виде холостой и рабочей бобышек, последняя
из которых установлена с возможностью взаимодействия в процесе работы с муфтой запирающего устройства, соединенной тросом с храпо вы.м механизмом, смонтированным на тележке захвата.
2. Захват по п. 1, отличающийся тем, что, с целью обеспечения подвески траверсы к тяговой ветви тягово-несушего каната с двумя степенями свободы, траверса соединена с тележкой прИ помощи вертлюга.
3. Захват по пп. 1 н 2, отличающийся тем, что траверса имеет в плане Z-образную форму, а внутренняя .поверхность зевов крюков Выполнена зубчатой.