Изобретение относится к измерительной технике.
Известна храповая муфта свободного хода, используемая одновременно для измерения частоты вращения и углового положения объекта, содержащая концентрично установленные обойму с профилированными зубьями на внутренней поверхности и вал 2 с элементом зацепления в виде пальца, установленного в диаметральном отверстии вала, а также два магнита с электрическими измерительными обмотками, установленных в валу концентрично относительно пальца. Преобразователь электрических сигналов в показатели частоты вращения или углового положения соединен с обмотками. Палец выполнен из трех частей, причем средняя часть имеет магнитную проницаемость меньшую, чем крайние части. При относительном вращении вала и обоймы при обгоне палец перемещается по оси магнитов, изменяя магнитные потоки, в результате этого в измерительных обмотках появляются переменные электрические сигналы, которые преобразуются преобразователем в частоту относительного вращения (авт. свид. СССР N 1474354, кл. F 16 D 41/07, 1989 г.).
Недостатком данной муфты является то, что она не позволяет измерять скорость вращения другого объекта.
Аналогичное данному другое устройство (патент РФ N 2062919, кл. F 16 D 41/07, 1996 г.) позволяет одновременно измерять частоту вращения двух объектов, но не может быть использовано для передачи движения.
Наиболее близким по технической сущности к изобретению является трансформаторный датчик положения, содержащий неподвижный магнитопровод с обмоткой возбуждения и измерительной обмоткой и подвижный магнитопровод, выполненный в виде двух валов, кинематически связанных друг с другом при помощи двух одинаковых составных шестерен, состоящих каждая из соединенных в диагональной плоскости ферромагнитной и неферромагнитной частей и ориентированных относительно друг друга таким образом, что зацепление их всегда происходит зубьями с одинаковой длиной ферромагнитных и неферромагнитных участков. В варианте исполнения датчика ферромагнитная часть шестерен выполнена с двумя наклоненными под тупым углом друг к другу торцевыми поверхностями (авт. свид. СССР N 424073, кл. G 01 P 3/42, 1974 г., прототип).
Недостатком данного датчика является то, что он не позволяет измерять сумму угловых перемещений двух объектов.
Техническим результатом изобретения является возможность измерения суммы угловых перемещений двух объектов.
Этот результат достигается тем, что трансформаторный датчик положения, содержащий неподвижный магнитопровод с обмоткой возбуждения и измерительной обмоткой и подвижный магнитопровод, выполненный в виде двух валов, кинематически связанных друг с другом при помощи двух одинаковых составных шестерен, состоящих каждая из ферромагнитной и неферромагнитной частей, при этом соединяемые части ориентированы относительно друг друга таким образом, что зацепление их всегда происходит зубьями с одинаковой длиной ферромагнитных и неферромагнитных участков, датчик снабжен дополнительным подвижным магнитопроводом в виде двух валов, кинематически связанных друг с другом при помощи двух одинаковых составных шестерен, состоящих каждая из ферромагнитной и неферромагнитной частей, при этом соединяемые части ориентированы относительно друг друга таким образом, что зацепление их всегда происходит зубьями с одинаковой длиной ферромагнитных и неферромагнитных участков. Такое выполнение датчика позволяет осуществлять суммирование угловых перемещений двух объектов.
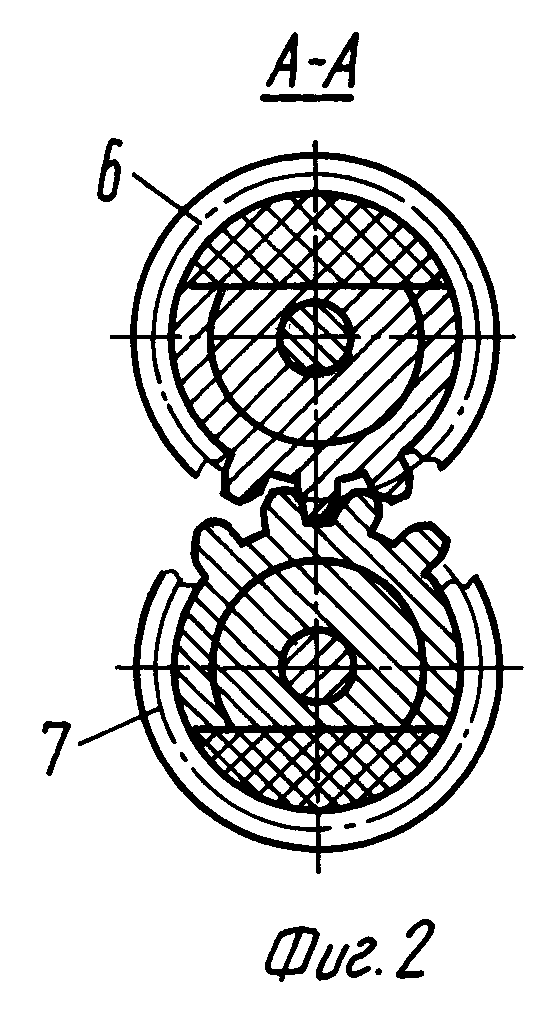
На фиг.1 схематично изображен предложенный трансформаторный датчик положения, продольный разрез; на фиг.2 - разрез А-А на фиг.1.
Датчик содержит неподвижный магнитопровод 1 с обмоткой 2 возбуждения и измерительной обмоткой 3, подвижный магнитопровод в виде валов 4 и 5, кинематически связанных между собой при помощи составных шестерен 6 и 7, показывающий прибор (например, милливольтметр) 8.
Датчик снабжен дополнительным подвижным магнитопроводом в виде валов 9 и 10, кинематических связааных между собой при помощи двух дополнительных составных шестерен 11 и 12. Шестерни 6, 7, 11 и 12 состоят каждая из двух половин, одна из которых изготовлена из ферромагнитного, а другая - из неферромагнитного (например, из пластмассы) материала. При этом соединяемые части ориентированы относительно друг друга таким образом, что зацепление их происходит зубьями с одинаковой длиной ферромагнитных и неферромагнитных участков, а основная 6 и дополнительная 7 составные шестерни своими одноименными (например, ферромагнитными) торцами ориентированы встречно друг к другу.
Ферромагнитная и неферромагнитная части шестерен 6, 7, 11 и 12 в плоскости сечения жестко соединены между собой известными способами (склеивание, сварка, склепывание и т.п.). Как правило, нарезка таких составных шестерен производится в собранном виде. В шестернях с косой торцовой поверхностью длина зубьев изменяется по линейному закону: на одной половине окружности длина зубьев линейно увеличивается, а на другой половине также линейно уменьшается. Выполнение шестерен составными из ферромагнитной и неферромагнитной частей повышает их долговечность, так как нагрузка на зубья остается равномерной. Это повышает надежность датчика.
Цапфы валов 4, 5, 9 и 10 расположены в гнездах или отверстиях неподвижного магнитопровода 1 и неферромагнитных перекладин 13. Электромагнитная система датчика опирается на стойки (не показаны). Один из основных и один их дополнительных валов (например, валы 4 и 9) соединены с контролируемыми объектами (не показаны).
Подвижные магнитопроводы могут быть изготовлены как в виде отдельных валов и шестерен, так и в виде валов-шестерен. Последний вариант предпочтительнее, так как в этом случае устраняется воздушный зазор между валом и шестерней, что повышает выходной сигнал. Датчик может работать и как датчик скорости. В этом случае магнитопроводы не поворачиваются, а вращаются, и на выходе датчика появляется сигнал, равный алгебраической сумме скоростей контролируемых объектов. И в том, и в другом случае датчик может быть одновременно использован также и в качестве передаточного механизма.
Трансформаторный датчик положения работает следующим образом.
При подаче напряжения переменного тока на обмотку 2 возбуждения магнитный поток, созданный этой обмоткой, замыкается через валы 4, 5, 9 и 10 и шестерни 6, 7, 11 и 12. При повороте последних под действием перемещающихся объектов магнитные потоки изменяются по величине в соответствии с изменением длины ферромагнитных участков зубьев шестерен 6, 7, 11 и 12. В положении шестерен, изображенном на фиг. 1, магнитные потоки имеют максимальное значение. При повороте подвижных магнитопроводов 4, 5 и 9, 10 в ту или другую сторону от указанного положения магнитные потоки уменьшаются и становятся минимальными при угле поворота, равном 180o. Линейное изменение величины магнитных потоков вызывает соответственно и линейное изменение наводимой ими выходной ЭДС. Таким образом, ЭДС, измеренная на выходе датчика показывающим прибором 8, характеризует сумму угловых перемещений, осуществленных контролируемыми объектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1972 |
|
SU424073A1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ВАЛА | 1997 |
|
RU2145053C1 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |
| ХРАПОВАЯ МУФТА СВОБОДНОГО ХОДА | 1992 |
|
RU2062919C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК УГЛА ПОВОРОТА ДВУХ ВАЛОВ | 1991 |
|
RU2010156C1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1998 |
|
RU2161774C2 |
| Трансформаторный датчик угловых перемещений | 1985 |
|
SU1245871A1 |
| ИНДУКТИВНО-ТРАНСФОРМАТОРНЫЙ ДАТЧИК | 1997 |
|
RU2138011C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138773C1 |
Изобретение относится к измерительной технике. Трансформаторный датчик положения содержит неподвижный магнитопровод с обмоткой возбуждения и измерительной обмоткой, подвижный магнитопровод и дополнительный подвижный магнитопровод. Подвижный магнитопровод и дополнительный подвижный магнитопровод выполнены в виде двух валов. Валы кинематически связаны друг с другом при помощи двух одинаковых составных шестерен. Каждая шестерня состоит из ферромагнитной и неферромагнитной частей. При этом соединяемые части ориентированы относительно друг друга таким образом, что зацепление их всегда происходит зубьями с одинаковой длиной ферромагнитных и неферромагнитных участков. Такое выполнение датчика позволяет измерять сумму угловых перемещений двух объектов. 2 ил.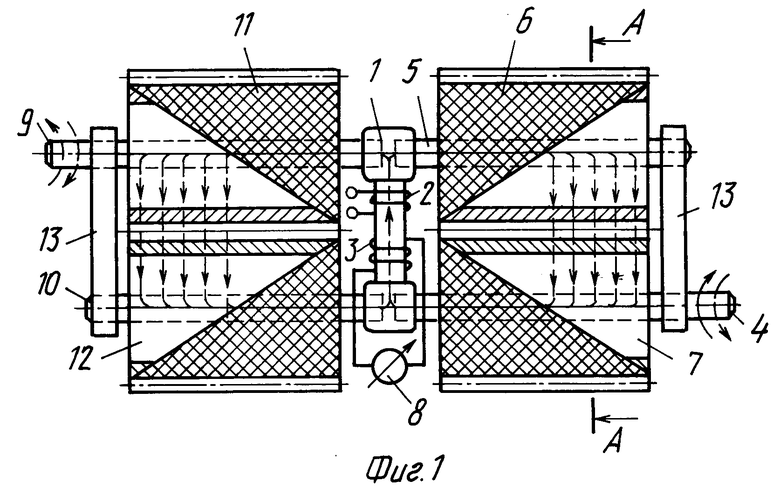
Трансформаторный датчик положения, содержащий неподвижный магнитопровод с обмоткой возбуждения и измерительной обмоткой и подвижный магнитопровод, выполненный в виде двух валов, кинематически связанных друг с другом при помощи двух одинаковых составных шестерен, состоящих каждая из ферромагнитной и неферромагнитной частей, при этом соединяемые части ориентированы относительно друг друга таким образом, что зацепление их всегда происходит зубьями с одинаковой длиной ферромагнитных и неферромагнитных участков, отличающийся тем, что он снабжен дополнительным подвижным магнитопроводом в виде двух валов, кинематически связанных друг с другом при помощи двух одинаковых составных шестерен, состоящих каждая из ферромагнитной и неферромагнитной частей, при этом соединяемые части ориентированы относительно друг друга таким образом, что зацепление их всегда происходит зубьями с одинаковой длиной ферромагнитных и неферромагнитных участков.
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1972 |
|
SU424073A1 |
| 0 |
|
SU180414A1 | |
| Импульсный датчик суммарной скорости вращения | 1974 |
|
SU682823A1 |
| GB 1598290 A, 06.09.81 | |||
| Приспособление для замыкания в крайних положениях железно дорожной стрелки | 1928 |
|
SU9119A1 |
| Устройство для вибрационного массажа | 1986 |
|
SU1482705A1 |

