Данное изобретение относится к системам восприятия изображения, а конкретнее к устройству, используемому для восприятия изображений множества печатных листов, расположенных непрерывной лентой, или в виде множества разрезанных печатных листов, непрерывно подаваемых к устройству, для определения того, являются ли приемлемыми эти печатные листы, причем это устройство содержит средство для компенсации изменений в скорости листов.
Печатные листы могут проверяться и пропускаться для использования устройства, имеющего транспортный механизм для транспортировки листов при номинальной скорости мимо стационарного рабочего места и сканирования их сенсорными средствами для генерирования их электрических выражений. Сканирование может производиться с использованием твердотельных датчиков, таких как приборы с зарядовой связью (ПЗС), выполненных так, чтобы считывать строку изображения, с помощью самосканирующих кремниевых фотодиодных линейных матриц, содержащих интегрирующие фотодиодные элементы, или других одиночных, линейных, двумерных матричных интегрирующих датчиков, и т.д. однако, если время интегрирования датчика и частота опроса поддерживаются постоянными, все эти устройства являются неприемлемыми, потому что они выдают изображения с геометрическими искажениями вследствие изменения в скорости объекта, который сканируется.
Чтобы решить проблему геометрических искажений, предыдущие устройства содержали устройство синхронизации, такое как цифровой датчик угла поворота вала на системе транспортировки, чтобы засинхронизировать частоту дискретизации с движением. В таком выполнении величина сигнала, поступающего со сканера, непостоянна, потому что сигнал интегрируется в течение периода дискретизации, что делает его пропорциональным количеству света, попадающего на датчик, и количеству времени между дискретными отсчетами сигнала. Поэтому изменения в движении сканируемого листа дают в результате пропорциональное искажение сигнала.
Некоторые предыдущие устройства компенсировали это изменение в величине сигнала применением автоматической регулировки усиления (АРУ). Этот метод имеет ограниченный динамический диапазон и, кроме того, результирующее усиление по изображению зависит от содержания изображения. Далее, сканирующие средства могут иметь существенное отношение сигнала к шуму. Если усиление регулируется на большую величину, результирующий сигнал будет слишком зашумлен и не даст приемлемых результатов.
Другие ранее применявшиеся устройства компенсировали изменения в движении образца посредством предотвращения интегрирования света в течение части времени между моментами дискретизации и выдерживания постоянства времени интегрирования, получая таким образом не зависящий от скорости сигнал. Однако этот метод искажает информацию, потому что не вся сканируемая поверхность участвует в формировании сигнала. Во время запирания сканирующих средств информация от объекта теряется.
Другие предыдущие устройства корректировали изменения скорости посредством определения скорости и регулирования прозрачности нейтрального светофильтра между камерой и объектом. Этот подход требует сложных механических устройств, имеет ограниченный динамический диапазон и ограниченное время реагирования на быстрые изменения скорости.
Ввиду упомянутых выше недостатков известного уровня техники, в основу данного изобретения была положена задача предложить устройство восприятия изображения, в котором изображения, полученные со сканирующих средств, стабилизированы чтобы скомпенсировать изменения в скорости движения считываемого объекта, а так же предложить устройство автоматической компенсации, которое может работать в широком диапазоне изменения скорости.
Поставленная задача решается тем, что согласно изобретению устройство восприятия изображений, содержит механизм транспортировки для перемещения объекта мимо датчика, и устройства управления датчиком для управления его работой. Скорость механизма транспортировки непрерывно контролируется и генерируется выходной сигнал множителя по скорости, пропорциональный скорости механизма транспортировки. Если скорость падает ниже установленного заранее порога, например, 50%, частота отбора проб сканера может также быть увеличена, и проведены дополнительные расчеты для компенсации изменения частоты отбора проб.
В дальнейшем изобретение поясняется конкретным вариантом его выполнения со ссылкой на сопровождающие чертежи, на которых:
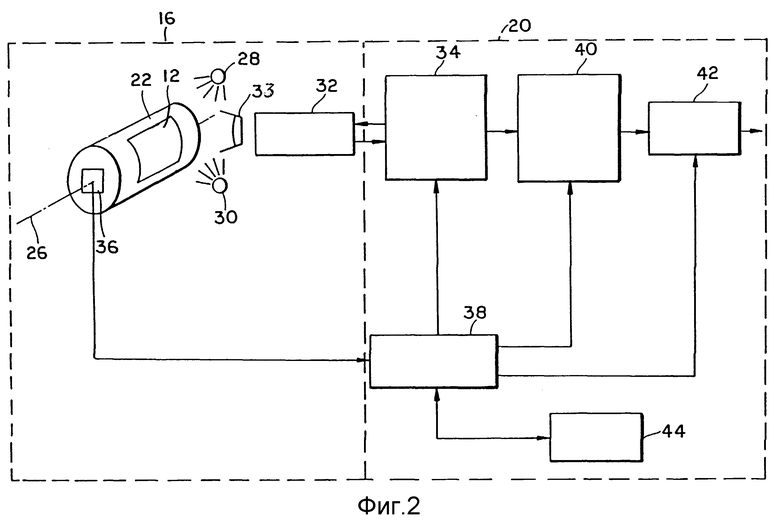
фиг. 1 изображает блок-схему предпочтительного варианта воплощения изобретения;
фиг. 2 - блок-схему другого варианта воплощения изобретения.
Детали варианта воплощения изобретения показаны на фиг. 1. Рабочее место сканера 16 содержит барабан 22, имеющий цилиндрическую поверхность 24, несущую лист 12 и вращающуюся вокруг оси 26. Несколько ламп 28, 30 используются для освещения листа 12. Сканирующее средство или датчик 32 используется для сканирования листа 12 через линзу 33, которая фокусирует изображение листа 12 на сканирующий датчик 32, который может состоять, например, из линейной матрицы приборов с зарядовой связью (ПЗС), устроенных для сканирования фактически одной строки, простирающейся по ширине листа 12, и она управляется схемой управления датчиком и усиления 34.
Датчик угла поворота вала 36 соединен с барабаном 22 и служит в качестве устройства контроля или синхронизации. Сигналы с датчика угла поворота вала 36 подаются на схему управления датчиком и усиления 34 для синхронизации отбора проб сигнала с выхода датчика. Схема управления датчиком и усиления 34 содержит управление тактом для работы сканирующего датчика 32, усиления и обработки сигнала с выхода датчика и может осуществлять преобразование в цифровую информацию. Геометрическое искажение устраняется посредством отбора проб сигнала датчика в точные интервалы движения развертки, выбора разноса между строками и считывания данных с датчика.
Выход датчика угла поворота вала 36 также идет на схему определения скорости 38. Эта схема 38 осуществляет обработку сигнала, фильтрацию, определение скорости и обработку сигнала датчика угла, чтобы получить выход множителя. Сигналы с этого выхода и выхода схемы управления датчиком и усилением (38) перемножаются друг на друга в схеме умножения 40 для точной компенсации сигнала сканирующего датчика при изменениях скорости вращения барабана 22, как более подробно пояснено ниже. Эта компенсация может быть точной, потому что период отбора проб и множитель 40 используют идентичные данные с датчика угла, как устройства синхронизации.
Конкретнее, датчик изображения 32 и схема управления датчиком и усиления 34 работают для выдачи при определенной заранее скорости, определяемой физическими характеристиками датчика изображения, производительностью обработки информации процессора 20 и т.д. Информация с датчика изображения 32 выдается в виде потока данных, соответствующих сканируемой строке. Процессор данных 20 собирает эти данные, чтобы генерировать изображение пробы. Однако, если скорость барабана 22, а значит и листа 12, отличается от номинальной, интенсивность изображения листа 12 искажается, потому что датчик изображения 32 сканирует каждую строку в течение периода сканирования большего или меньшего, чем период сканирования, требуемый при нормальной скорости барабана. В варианте воплощения по фиг. 1 умножитель 40 используется для установки амплитуды сигналов с датчика изображения и его схемы управления и усиления 34 для компенсации изменений скорости барабана 22. Конкретнее, детектор скорости 38 генерирует выход множителя, который выбирается для масштабирования амплитуд с выхода датчика изображения 32 для компенсации изменений скорости барабана 22.
Например, если барабан вращается со скоростью, которая на 5% выше номинала, выход схемы управления датчиком изображения 34 уменьшается на 5%. Детектор скорости 38 выдаст на умножитель величину, соответствующую 105% величины при номинальной скорости, который при умножении на уменьшенную величину со схемы 34 компенсирует ее уменьшение из-за увеличившейся скорости.
Величина умножителя, выдаваемого детектором скорости 38, предпочтительно регулируется, чтобы соответствовать характеристике передачи датчика изображения 32 при сравнительно малых изменениях скорости так, что характеристика датчика изображения 32 обычно также имеет линейное изменение. Однако, при больших изменениях скорости, характеристика датчика изображения 32 может стать нелинейной. Соответственно, детектор скорости 38 может иметь средства для определения правильного масштабирующего множителя для датчика изображения 32, например, в виде справочной таблицы 44.
Вариант воплощения по фиг. 1 позволяет получить точное сканирование объектов в диапазоне скоростей примерно 2:1. Однако можно достичь восприятия изображений в гораздо более широком диапазоне скоростей усовершенствованием по изобретению, показанным на фиг. 2. Как и в варианте воплощения по фиг. 1, оснащенный лист 22 движется перед линзой 34, которая фокусирует изображение листа на датчик изображения 32. Сигналы с датчика угла 36 на валу барабана подаются на схему детектора скорости 38. Эта схема обрабатывает сигнал, фильтрует его и определяет скорость, как и раньше. Скорость обрабатывается, и уточняется ее диапазон. Если скорость транспортировки находится в диапазоне между половиной максимальной и максимальной скоростью, управление датчиком изображения идет обычным образом: сигналы, выдаваемые на управление датчиком изображения 34 заставляют его проводить выборку проб и сканировать лист 22 один раз на расстоянии между двумя строками. Детектор скорости 38 рассчитывает выход множителя скорости, чтобы точно скомпенсировать сигнал датчика изображения на изменения периода отбора проб. Детектор скорости выдает сигнал на схему накопителя 42, чтобы данные пропускались через него без изменений. В этом диапазоне скоростей оборудование работает идентично устройству, описанному ранее по фиг. 1, для первого варианта воплощения.
Когда детектор скорости 38 воспринимает скорость транспортировки меньшую, чем половина максимальной скорости, на управление датчиком изображения 34, умножитель 40 и накопитель 42 выдаются синхронизованные сигналы. В этих условиях датчик изображения 32 может оказаться перегруженным вследствие чрезмерно большого периода сканирования строки. Выгодно период сканирования уменьшать следующим образом. В этом диапазоне скоростей, управление датчиком 34 изображения делает за период два сканирования и считывает два раза сигнал - на один интервал между строками. Детектор скорости 38 вырабатывает выход множителя скорости, который точно компенсирует сигнал датчика изображения для изменений в сокращенном теперь периоде сканирования. Этот расчет может потребовать использования справочной таблицы 44, как описано выше. Детектор скорости выдает сигнал на схему накопителя 42 для аккумулирования пар выборок с датчика изображения. Накопитель 42 комбинирует два набора выборок на каждую строку сканирования для получения комбинированного набора выборок для этой строки. Например, датчик изображения 32 может содержать 8000 элементов датчика, нормально выдающих последовательность из 8000 сигналов, представляющих строку развертки по листу 22 при вращении барабана с нормальной скоростью. Эти сигналы после соответствующего преобразования аналог/цифра подаются блоком управления датчиком изображения и усиления 34 на умножитель компенсации скорости 40. Если скорость барабана 12 падает примерно до половины его скорости, то частота сканирования датчика изображения 32 удваивается, чтобы получить две последовательности из 8000 сигналов для каждой строки развертки. Эти два потока после масштабирования в умножителе 40 объединяются попарно (например, посредством сложения и деления на два) в накопителе 42, чтобы получить одну последовательность из 8000 сигналов для процессора.
Если детектор скорости 38 обнаружит, что скорость транспортировки стала меньше одной четверти, но более одной восьмой от максимальной, выдаются сигналы на блок управления 34 датчиком изображения, на умножитель 40 и накопитель 42. В этом диапазоне скоростей блок управления 34 датчиком изображения производит выборки и считывает сигналы с датчика четыре раза в каждой строке развертки. Детектор скорости 38 рассчитывает выход множителя скорости, который точно компенсирует сигнал датчика изображения на изменение в укороченном периоде производства выборок сигнала. Детектор скорости 38 выдает сигнал на схему накопителя 42, чтобы он аккумулировал наборы из четырех выборок датчика изображения, делил бы результат на четыре, и выдавал бы эти конечные данные на процессор для анализа.
Этот принцип непрерывно используется при снижении скорости транспортировки для получения произвольно большого динамического диапазона скоростей транспортировки с датчиком скорости 34, определяющим диапазон скоростей, суб-разнос строк, умножитель компенсации скорости 40, управление аккумулятором и управление делением. В этом диапазоне время интегрирования датчика изображения сохраняется в пределах диапазона 2:1, сохраняя отношение сигнал/шум и упрощая электронику в датчике изображения, сохраняя при этом геометрическую и фотометрическую точность данных, используемых остальной частью системы.
Изобретение относится к системам воспроизведения изображений с листов. Его использование позволяет скомпенсировать изменения в скорости движения считываемых листов в широком диапазоне. Устройство содержит сканер, включающий в себя лампы 28, 30 и датчик 32 сканирования для сканирования строки изображения по ширине. Технический результат достигается благодаря введению барабана 22 для перемещения листа 12 мимо датчика 32 с номинальной скоростью, датчика 36 угла поворота вала для контроля скорости, схемы 34 управления датчиком и усиления, схемы 38 детектора скорости и умножителя 40. Способ состоит в перемещении листа 12 мимо сканирующего датчика 32 с номинальной скоростью. Технический результат достигается благодаря тому, что контролируют скорость перемещения, генерируют поток сигналов, каждый из которых соответствует сканированию строки листа, генерируют сигнал умножителя в зависимости от контролируемой скорости, осуществляют умножение сигналов сканирования на сигнал умножителя и получают поток отрегулированных по скорости сигналов, которые объединяют и получают изображение объекта. 2 с. и 6 з.п ф-лы, 2 ил.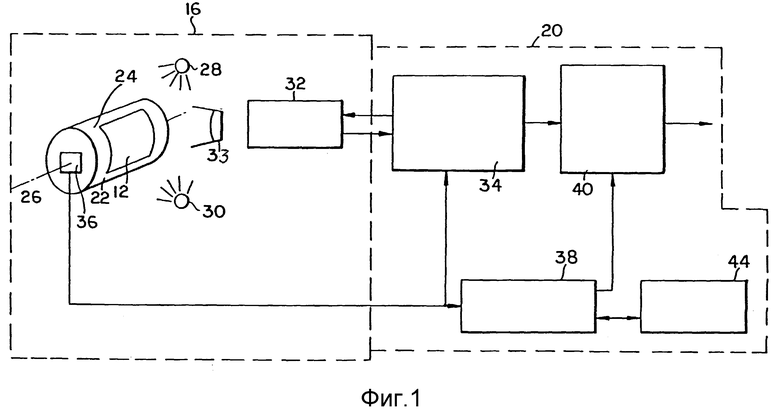
| Огнетушитель | 0 |
|
SU91A1 |
| Анализирующее устройство для фототелеграфного аппарата | 1973 |
|
SU556563A1 |
| US 4862284 A, 29.08.89 | |||
| GB 1572539 A, 30.07.80 | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| EP 0371505 A2, 06.06.90. | |||

