Известны устройства для измерения высоты, основанные на использовании радиоактивных источников гамма-излучения [1, 2].
Устройство, описанное в работе [1], содержит источник и приемник гамма-излучения. В качестве источника гамма-излучения используется передатчик, содержащий радиоактивный изотоп кобальт-60, а приемник содержит последовательно включенные детектор излучения, нормализатор, усилитель и измеритель скорости счета (интенсиметр).
Передатчик излучает поток гамма-квантов в сторону подстилающей поверхности. Отраженный от подстилающей поверхности поток гамма-квантов регистрируется детектором излучения, который преобразует кванты излучения в электрические сигналы. Эти сигналы формируются в нормализаторе по длительности и амплитуде и подаются через усилитель на интенсиметр. Плотность потока отраженных от подстилающей поверхности гамма-квантов служит мерой высоты летательного аппарата (ЛА).
Недостатком описанного устройства является то, что интенсивность излучения радиоактивного изотопа, введенного в состав передатчика высотомера, изменяется с течением времени согласно закона радиоактивного распада, что, в свою очередь, приводит к увеличению погрешности измерения высоты. Это обстоятельство требует дополнительных проверок прибора или его перенастройки.
Другим недостатком описанного устройства, в случае использования его в качестве измерителя высоты, устанавливаемого на спускаемых аппаратах (СА) космических кораблей, обеспечивающего формирование исполнительного сигнала на включение двигателей мягкой посадки, является то, что оно не компенсирует дополнительную погрешность в измерении высоты, вызванную изменением фоновой составляющей регистрируемого сигнала. Указанное изменение фона обусловлено тем, что настройка измерителя высоты происходит перед запуском СА, а его реальная работа происходит после прохождения СА при посадке через плотные слои атмосферы, в результате которого происходит обгорание теплоизоляции корпуса, что, в свою очередь, приводит к изменению фонового сигнала, обусловленного гамма-квантами, отраженными от корпуса СА. Другой причиной изменения фона может служить незначительное отслоение теплозащитного покрытия (ТЗП) СА при прохождении его через плотные слои атмосферы, а также несанкционированная загрузка СА с орбитальной станции сторонними радиоактивными источниками или простая перекомпановка приборов в приборном отсеке.
Еще одним недостатком описанного устройства является значительная зависимость показаний прибора от скорости спуска СА, т.е. значительная динамическая погрешность измерения высоты.
Устройство, приведенное в работе [2], по своему принципу действия аналогично описанному выше и, следовательно, имеет те же недостатки.
Из известных устройств наиболее близким по технической сущности к предлагаемому устройству является радиоизотопный высотомер, описанный в работе [3], содержащий источник излучения, связанные последовательно реперный источник излучения, сцинтилляционный блок детектирования, регистрирующий гамма-излучение реперного источника излучения и обратно рассеянное от подстилающей поверхности гамма-излучение, фотоприемник, преобразователь частотного сигнала, компенсатор динамической погрешности, а также исполнительное устройство, блок стабилизации, содержащий два компаратора с опорными сигналами SE1, SE2, входы которых соединены с выходом фотоприемника, а выходы - с входами соответствующих диодных интенсиметров с различающимися в два раза коэффициентами преобразования, выходы диодных интенсиметров подключены к входам блока вычитания, выход которого подключен к второму входу фотоприемника, первый вход которого соединен с выходом сцинтилляционного блока детектирования.
Недостатком известного радиоизотопного высотомера является изменение его показаний со временем вследствие радиоактивного распада источника гамма-излучения и изменение фоновой составляющей сигнала до и после орбитального полета СА космического корабля, а также ограниченный диапазон измерения высоты с компенсацией динамической погрешности и связанное с этим ограничением отсутствие возможности непрерывного измерения высоты и скорости спуска СА в требуемом диапазоне высот.
Цель изобретения - расширение диапазона измерения высоты с компенсацией динамической погрешности и, как следствие, расширение функциональных возможностей радиоизотопного высотомера, связанное с непрерывным измерением скорости спуска СА в измеряемом диапазоне высот.
Технический результат обеспечивается путем введения устройства компенсации изменения активности источника излучения и фона, а также устройства непрерывного изменения высоты и скорости спуска СА в рабочем диапазоне высот и автоматической компенсацией динамической погрешности с алгоритмом работы, отличным от аналога [3], так как в устройстве, описанном в работе [3], указанная компенсация основана на решении двух нелинейных трансцендентных уравнений (динамической характеристики и кривой коррекции высотомера), которое обеспечивается только в одной точке высоты.
Поставленная цель достигается тем, что в радиоизотопный высотомер, содержащий источник излучения, связанные последовательно реперный источник излучения, сцинтилляционный блок детектирования, регистрирующий гамма-излучение реперного источника излучения и обратно рассеянное от подстилающей поверхности гамма-излучение, и фотоприемник, а также преобразователь частотного сигнала, исполнительное устройство, блок стабилизации, содержащий два компаратора с опорными сигналами SE1, SE2, входы которых соединены с выходом фотоприемника, а выходы - с входами соответствующих диодных интенсиметров с различающимися в два раза коэффициентами преобразования, выходы диодных интенсиметров соединены с входами блока вычитания, выход которого подключен к второму входу фотоприемника, первый вход которого соединен с выходом сцинтилляционного блока детектирования, введены устройство компенсации изменения активности источника излучения и фона, состоящее из последовательно соединенных формирователя начальной задержки, измерителя сигнала реперного источника излучения, вычислителя сигнала компенсации изменения активности источника излучения, формирователя интервала времени измерения сигнала фона, формирователя сигнала компенсации фона, выходного формирователя, а также буферного регистра, вход которого соединен с вторым выходом вычислителя сигнала компенсации изменения активности источника излучения, а выход с входом управляемого кодом делителя частоты, второй вход которого соединен с выходом фотоприемника, а выход - с вторым входом формирователя сигнала компенсации фона и с входом преобразователя частотного сигнала, второй вход которого соединен с выходом выходного формирователя, а также нормализатор сигнала, частотный компаратор и устройство непрерывного измерения высоты и скорости спуска СА, включающее в себя два скользящих интегратора с различающимися в m раз временами усреднения, линеаризирующий кодовый преобразователь, вычитатель, сумматор, умножитель и регистратор высоты и скорости; при этом скользящие интеграторы имеют общий вход, подключаемый к выходу нормализатора сигнала, первый вход которого подключен к выходу преобразователя частотного сигнала, а на второй вход подан опорный сигнал; выходы скользящих интеграторов подключены к первому и второму входам линеаризирующего кодового преобразователя, первый выход которого подключен к первым входам вычитателя и сумматора, а второй выход подключен к второму входу вычитателя, выход которого подключен к первому входу умножителя, на второй вход которого подается опорный сигнал, выход подключен к второму входу сумматора, выход которого подключен к первому входу регистратора высоты и скорости, второй вход которого подключен к выходу вычитателя, и к первому входу исполнительного устройства, второй вход которого подключен к выходу частотного компаратора, первый вход которого подключен к выходу фотоприемника, а на второй вход подан опорный сигнал, на третий вход исполнительного устройства подается опорный сигнал.
На фиг. 1 показана структурная схема радиоизотопного высотомера с непрерывным измерением высоты и скорости и автокомпенсацией динамической погрешности.
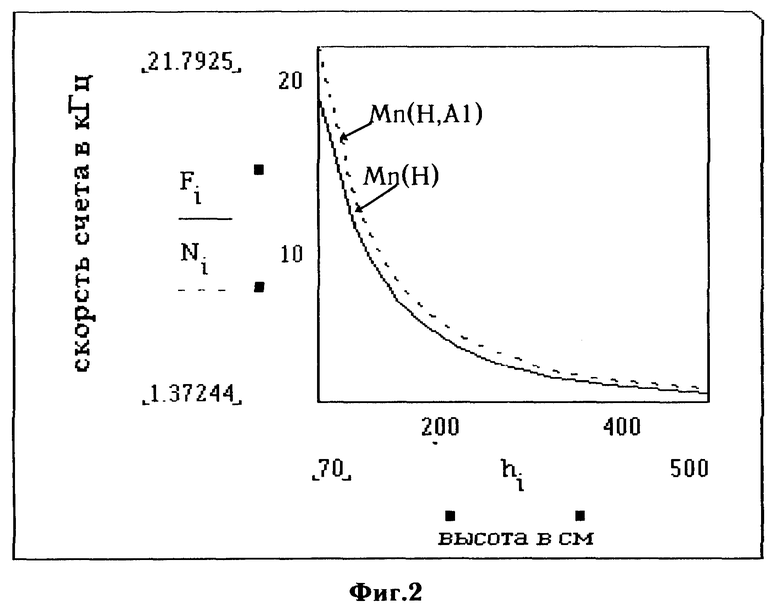
На фиг. 2 показана статическая характеристика высотомера на входе и выходе нормализатора.
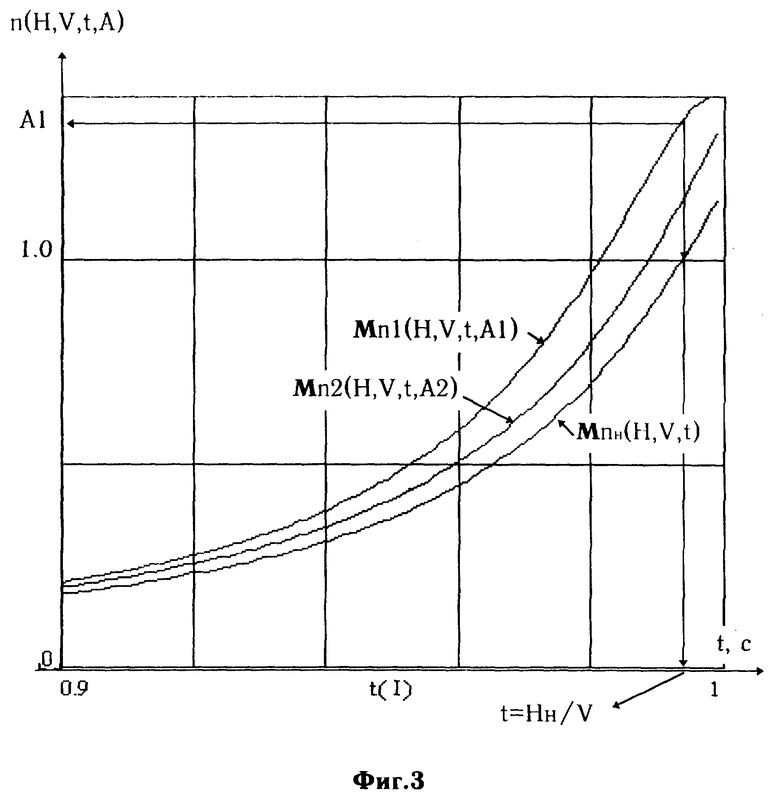
На фиг. 3 показаны динамические характеристики на входе и выходе нормализатора.
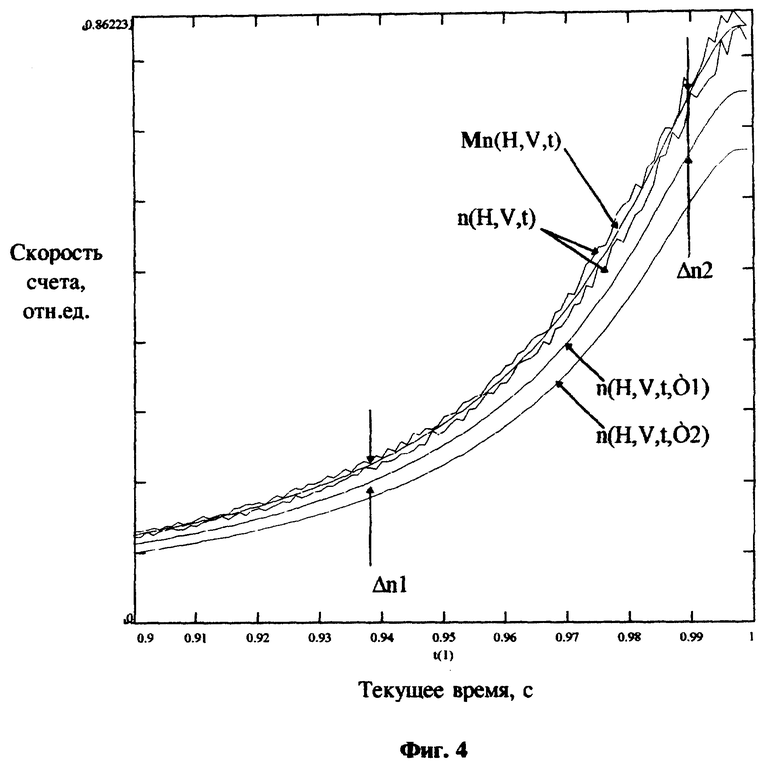
На фиг. 4 показаны сигналы на входе и выходе интеграторов СИ1 и СИ2.
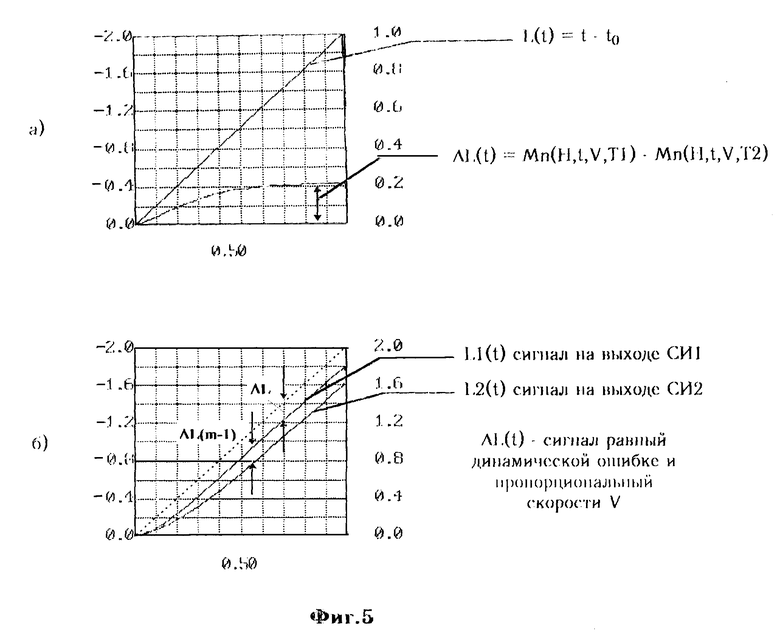
На фиг. 5 показан принцип автоматической компенсации динамической погрешности высотомера с одновременным измерением скорости.
Радиоизотопный высотомер содержит блок источника излучения 1, сцинтилляционный блок детектирования 2, реперный источник излучения 3, фотоприемник 4, компараторы 5, 6, диодные интенсиметры с различающимися в два раза коэффициентами преобразования 7, 8, блок вычитания 9, формирователь начальной задержки 10, измеритель сигнала реперного источника излучения 11, вычислитель сигнала компенсации изменения активности источника излучения 12, формирователь интервала времени измерения сигнала фона 13, формирователь сигнала компенсации фона 14, выходной формирователь 15, буферный регистр 16, управляемый кодом делитель частоты 17, преобразователь частотного сигнала 18, нормализатор сигнала 19, скользящие интеграторы с различающимися в m раз временами усреднения 20, и 21, линеаризирующий кодовый преобразователь 22, вычитатель 23, умножитель 24, сумматор 25, регистратор высоты и скорости 26, частотный компаратор 27, исполнительное устройство 28.
Радиоизотопный высотомер работает следующим образом.
Источник излучения 1, содержащий источник гамма-излучения, например Cs-137, и защитную оболочку из материала с большим удельным весом и атомным номером (например вольфрам, обедненный уран) имеющую коллимирующее выходное отверстие для формирования направленного потока, излучает гамма-кванты через обшивку и теплозащитное покрытие (ТЗП) спускаемого аппарата СА в сторону подстилающей поверхности (грунт, вода). Отраженный от поверхности поток гамма-излучения, проход через ТЗП и обшивку СА, регистрируется сцинтилляционным блоком детектирования 2, содержащим реперный источник гамма-излучения 3, например, на основе радиоактивного изотопа Cs-137. Гамма-кванты, преобразованные сцинтилляционным блоком детектирования 2 в фотоны оптического диапазона, поступают на вход фотоприемника 4, который, в свою очередь, преобразует их в электрические импульсы. Одновременно осуществляется выделение полезного сигнала из собственного шума фотоприемника 4. С целью компенсации изменения характеристик фотоприемника от температуры и со временем используется специальная обработка сигнала в блоке стабилизации. Основными элементами блока стабилизации являются компараторы 5 и 6, диодные интенсиметры 7 и 8 с различающимися в 2 раза коэффициентами преобразования, сигнал с выходов которых поступают на входы 1 и 2 блока вычитания 9 соответственно, на выходе которого вырабатывается сигнал стабилизации, управляющий работой фотоприемника 4 [3].
Сигнал с выхода фотоприемника 4 в виде случайной последовательности импульсов n(H, t), математическое ожидание частоты следования которых Mn(H,t) зависит от высоты СА до подстилающей поверхности и описывается статической характеристикой высотомера Mn(H) ≅ f(H) [3], транслируется через управляемый кодом делитель частоты на вход преобразователя частотного сигнала 18. В преобразователе частотного сигнала 18 производится вычитание частоты фона n(H >> Hcp,t) = nф = Ac.
Для компенсации погрешности измерения высоты, обусловленной радиоактивным распадом источника гамма-излучения и погрешности измерения высоты, обусловленной изменением фона до и после орбитального полета СА, используется устройство компенсации изменения активности источника излучения и фона, содержащее формирователь начальной задержки 10, измеритель сигнала реперного источника излучения 11, вычислитель сигнала компенсации изменения активности источника излучения 12, формирователь интервала времени измерения сигнала фона 13, формирователь сигнала компенсации фона 14, выходной формирователь 15, буферный регистр 16, помещаемое между выходом фотоприемника 4 и первым и вторым входами преобразователя частотного сигнала 18.
Таким образом, на выходе преобразователя частотного сигнала 18 формируется сигнал с компенсацией погрешности, обусловленной радиоактивным распадом источника гамма-излучения и погрешности, обусловленной изменением фона.
С целью обеспечения непрерывного измерения скорости и высоты с компенсацией динамической погрешности в радиоизотопном высотомере используется нормализатор сигнала 19 и устройство непрерывного измерения скорости и высоты с компенсацией динамической погрешности, содержащее два скользящих интегратора 20 и 21 с различающимися в m раз временами усреднения, линеаризирующий кодовый преобразователь 22, вычитатель 23, умножитель 24, сумматор 25, регистратор высоты и скорости 26, вход которого подключен к выходу нормализатора сигнала 19, а выход подключен к первому входу исполнительного устройства 28, на третий вход которого подается опорный сигнал, а для повышения надежности высотомера в нем используется частотный компаратор 27, первый вход которого подключен к выходу фотоприемника 4, на второй вход подан опорный сигнал, а выход подключен к второму входу исполнительного устройства 28.
Для получения наиболее простого алгоритма работы устройства непрерывного измерения скорости и высоты с компенсацией динамической погрешности необходимо входной сигнал Mn(H) описать аналитическим выражением. Авторы на основании анализа множества полученных экспериментально тарировочных таблиц f(H) предложена аппроксимирующая функция (АФ) статической характеристики радиоизотопного высотомера, описывающая Mn(H) с точностью не хуже 0,5%, имеющая достаточно простой вид и отражающая физические процессы, влияющие на вид статической характеристик. Аппроксимирующая функция АФ имеет следующий вид:
АФ(H) = A[(M - b/H) arg tg (B/H)2 + C](1)
Коэффициенты A, M, b, B, C находятся из системы пяти уравнений, получаемых путем подстановки пяти различных значений высот и скорости счета n(H), снятых экспериментально.
Коэффициента M, b, B определяются геометрическими характеристиками высотомера, неизменными для всех изделий. Из двух других коэффициентов A и C, последний определяет аддитивную (фоновую), а первый - мультипликативную (масштабирующую), определяемую активностью источника и площадью детектора, компоненту статической характеристики.
Таким образом, на вход нормализатора 19 поступает сигнал с вычтенной из него фоновой составляющей (C= O) и описываемый аппроксимирующей функцией, имеющей следующий вид:
АФ2(H) = A[(M - b/H) arg tg (B/H)2 (2)
На втором входе нормализатора 19 устанавливается опорный сигнал A, равный значению скорости счета на выходе фотоприемника 4, измеренной на определенной высоте при настройке высотомера, например, на высоте 1.0 м.
В нормализаторе 19 входной сигнал (2) делится на величину опорного сигнала A, вследствие чего на выходе нормализатора 19 получаем сигнал (см. фиг. 2,3).
n(H) ≅ AФ3(H) = (M-в/H)arctg(B/H)2 (3)
Сигнал (3) поступает на входы скользящих интеграторов 20 и 21 устройств непрерывного измерения скорости и высоты с компенсацией динамической погрешности, осуществляющих операцию усреднения входного случайного сигнала с временами усреднения T1 = T и T2 = mT соответственно (см. фиг. 4). С выходов интеграторов отфильтрованные сигналы n1(H,t,T1) и n2(H,t,T2) поступают на первый и второй входы линеаризирующего кодового преобразователя 22, построенного на основе постоянного запоминающего устройства, который осуществляет линеаризацию сигнала с использованием функции АФ3(H). При этом, количество слов в преобразователе 22, определяется требуемой погрешностью определения высоты. Несмотря на то, что в обеих каналах преобразователя 22 записана одна и та же линеаризирующая функция L(n) = АФЗ-1(H), сигналы на выходе преобразователя 22 будут отличаться друг от друга, как показано на фиг. 5, на величину ΔL(m-1) вследствие различия постоянных интегрирования скользящих интеграторов 20 и 21. Сигналы с первого и второго выхода преобразователя 22 поступают на первый и второй входы вычитателя 23, в котором и определяется величина разности ΔL(m-1), прямо пропорциональна величине динамической ошибки ΔH и несущая информацию о скорости спуска СА V = ∂H/∂t и поступающая на второй вход регистратора высоты и скорости 26, который индицирует значения скорости. Этот же сигнал ΔL(m-1) с выхода вычитателя 23 поступает на первый вход умножителя 24, на второй вход которого подан опорный сигнал коррекции высоты срабатывания от скорости спуска СА K устанавливаемый при настройке высотомера. В умножителе 24 этот опорный сигнал K умножается на сигнал ΔL/(m-1). В результате на выходе умножителя 24 формируется сигнал KΔL/(m-1), несущий информацию о значении высоты ΔHK, на которую должен быть скорректирован сигнал, поступающий с первого выхода двухканального матричного линеаризующая кодового преобразователя.
В сумматоре 25, сигналы суммируются и на его выходе формируется сигнал пропорциональный истинной текущей высоте СА, скорректированный по скорости спуска СА, который поступает на первый вход исполнительного устройства 28. При достижении величиной этого сигнала значения опорного сигнала S(Hcp), последнее вырабатывает исполнительный сигнал.
Необходимо отметить, что в предлагаемом приборе вследствие большого количества узлов в его составе имеется вероятность ложного срабатывания, которое может произойти в любом из узлов 17 - 24.
В частности, ложное срабатывание может произойти вследствие, например, отказа любой из нескольких тысяч ячеек линеаризирующего кодового преобразователя 22 в результате действия ионизирующего излучения [4].
Если такое срабатывание случится на этапе спуска СА на парашюте на высоте нескольких километров, высотомер сформирует исполнительный сигнал на включение двигателей мягкой посадки СА, что может привести к катастрофическим последствиям. В связи с этим, для повышения надежности высотомера за счет снижения влияния ложного срабатывания, в него введен частотный компаратор 27, первый вход которого подключен к выходу фотоприемника 4, а на второй вход подан опорный сигнал, а выход подключен ко второму входу исполнительного устройства 28. Частотный компаратор 27 может быть реализован на основе генератора опорной частоты, управляемого кодом делителя частоты и схемы на основе реверсивного двоичного счетчика [5].
Такие компараторы имеют в 3 раза меньшую динамическую погрешность по сравнению с компараторами используемыми в прототипе при равной статистической погрешности [6]. Опорный сигнал, подаваемый на второй вход частотного компаратора 27, должен быть близок по величине к исполнительному сигналу S(Hcp), подаваемому на второй вход исполнительного устройства 28, но меньшее его с учетом максимальной скорости спуска, разницы альбедо (отражения гамма-излучения) поверхности посадки, минимального значения активности источника излучения и т. п. На выходе частотного компаратора сигнал появится при превышении сигналом на его первом входе величины опорного сигнала на высоте близкой к заданной высоте срабатывания, что разрешает прохождение исполнительного сигнала на включение двигателей мягкой посадки. Разрешающий сигнал связан с основным сигналом, поступающим на первый вход исполнительного устройства 28 с выхода сумматора 25 операцией "логическое И" (коньюнкция), следовательно сигнал на выходе исполнительного устройства 28 может появиться только при наличии сигналов на двух его входах. В результате введения параллельного канала на основе частотного компаратора 27, который выдает сигнал на исполнительное устройство 28, отказ типа "ложная тревога в узлах 17 - 25 радиоизотопного высотомера практически исключает его срабатывание на больших высотах, приводя к его срабатыванию на заданной высоте, но с большей погрешностью.
Отметим, что повышение устойчивости к ложным срабатываниям высотомера обусловлено принципом резервирования [7] и боле высокой надежностью частотного компаратора 27 по сравнению с надежностью узлов 17 - 25, за счет значительно меньшего количества элементов.
В результате реализации предлагаемого радиоизотопного высотомера достигается непрерывное измерение скорости и высоты с компенсацией динамической погрешности, значительное упрощение настройки прибора (задание двух коэффициентов - нормирующего A и коррекции - K вместо 8 - 10 в прототипе [3]), повышение его надежности за счет снижения (на один - два порядка) вероятности ложного срабатывания.
В предлагаемом радиоизотопном высотомере узлы 1...9 могут быть выполнены так же как в прототипе [3]. Функциональные узлы 10...15 могут быть выполнены на ОЭВМ типа 1830ВЕ31 с ПЗУ на микросхеме типа 1623РТ1, буферный регистр 16 - на микросхеме типа 1533ИР22, при этом начальная задержка, измерение сигнала реперного источника излучения и т.д. выполняются программно. Управляемый кодом делитель частоты 17, преобразователь частотного сигнала 18 и нормализатор 19 могут быть реализованы на микросхемах типа 133ИЕ8, представляющих собой управляемые кодом делители частоты. Скользящие интеграторы 20, 21 представляют собой измерители средней частоты следования импульсов на основе цифрового накопителя типа "скользящее окно" [8] и могут быть реализованы на основе статического оперативного запоминающего устройства [9] или с помощью микропроцессора. Линеаризующий кодовый преобразователь 22 может быть выполнен на микросхеме постоянного запоминающего устройства, в которое при программировании записываются рассчитанные по аппроксимирующей функции коды. Вычитатель 23, умножитель 24 и сумматор 25 могут быть реализованы на основе микросхем сумматоров и умножителей, например 1526ИМ1, 1802ВР4, арифметико-логических устройств, например 1526ИП3, или микропроцессора. Регистратор высоты и скорости 26 может быть выполнен на микросхемах и элементах индикации или телеметрии любого типа. Частотный компаратор 27 может быть выполнен на основе реверсивного счетчика, генератора опорной частоты и управляемого кодом делителя частоты. Исполнительное устройство 28 может быть выполнено на микросхеме цифрового компаратора, например 561ИП2, или по схеме частотного компаратора. Кроме того, многие из узлов 17...28 могут быть реализованы на основе базовых матричных кристаллов, например КН5501ХМ1, в которых необходимые элементы (счетчики, регистры и т.п.) создаются путем выполнения необходимых связей базовых элементов при программировании. Это позволяет повысить надежность высотомера, снизить энергопотребление и уменьшить габариты прибора.
Литература
[1] "Electronics", 1960, 33, N 2, с. 37.
[2] "Авиационная промышленность", 1967, N 9, с. 49 - 51.
[3] "Фотонный измеритель высоты КАКТУС", Каталог выставки "Высшая школа России и конверсия", М., ГК РФ по высшему образованию, стр. 243, 1993.
[4] Pictl J.C., Blanford JrT. Jr, "CMOS RAM cosmic ray induced error rate analysis", IEEE Trans. On Nucl. Sci., 1981, NS-28, N 6, p. 3962 - 67.
[5] Гутников В. С. "Интегральная электроника в измерительных устройствах", Л., Энергоатомиздат, 1988, стр. 178.
[6] Поздников В.И. "Применение метода последовательного анализа при решении релейных задач в радиоизотопном приборостроении", Ядерное приборостроение, 1981, вып. 1.
[7] Сигорский В. П. Математический аппарат инженера, Киев, "Техника", 1977, стр. 726.
[8] Седякин Н. М. Элементы теории случайных импульсных поток. М. Сов. Радио, 1965.
[9] Горбов А. А. , Демченков В.П., Корбков И.Н. Цифровой накопитель на интегральных оперативных запоминающих устройствах, Приборы и техника эксперимента, N 2, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОИЗОТОПНЫЙ ВЫСОТОМЕР | 1996 |
|
RU2105322C1 |
| СЛЕДЯЩИЙ УРОВНЕМЕР | 1994 |
|
RU2080564C1 |
| СЧЕТЧИК АМПЕР-ЧАСОВ | 1999 |
|
RU2160904C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ФОТОННЫХ ИСТОЧНИКОВ С УГЛОВЫМ РАЗРЕШЕНИЕМ | 2000 |
|
RU2187827C2 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ФОТОННЫХ ИСТОЧНИКОВ | 1999 |
|
RU2169380C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАЛЫХ ВЫСОТ И РЕНТГЕНОВСКИЙ ВЫСОТОМЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2236024C1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ПОСТОЯННОГО ТОКА | 1990 |
|
RU2016465C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ИЗМЕРЕНИЯ ДВУХ УГЛОВЫХ КООРДИНАТ ФОТОННЫХ ИСТОЧНИКОВ | 2001 |
|
RU2192656C2 |
| МАССОВЫЙ РАСХОДОМЕР ГАЗОЖИДКОСТНОГО ПОТОКА | 2000 |
|
RU2178871C1 |
| Радиоизотопный уровнемер | 1987 |
|
SU1601524A2 |
Изобретение относится к радиоизотопному приборостроению и может быть использовано для определения высоты в системах навигации летательных аппаратов (ЛА). Технический результат - повышение надежности измерений за счет компенсации динамической погрешности. Устройство содержит источник излучения, связанные последовательно реперный источник излучения, сцинтилляционный блок детектирования, фотоприемник, управляемый кодом делитель частоты, преобразователь частотного сигнала, нормализатор сигнала, устройство непрерывного измерения высоты и скорости, содержащее скользящие интеграторы, линеаризирующий кодовый преобразователь, вычитатель, сумматор, умножитель и регистратор высоты и скорости, исполнительное устройство, связанное через частотный компаратор с выходом фотоприемника, который также связан с блоком стабилизации и с управляемым кодом делителем частоты, соединенным по входу с устройством компенсации изменения активности и фона, имеющим связь со входами преобразователя частотного сигнала и включающим в себя формирователь начальной задержки, измеритель сигнала реперного источника излучения, вычислитель сигнала компенсации изменения активности источника излучения, формирователи интервала времени изменения сигнала фона и сигнала компенсации фона, а также выходной формирователь и буферный регистр, причем выход блока стабилизации подключен к второму входу фотоприемника. 6 ил.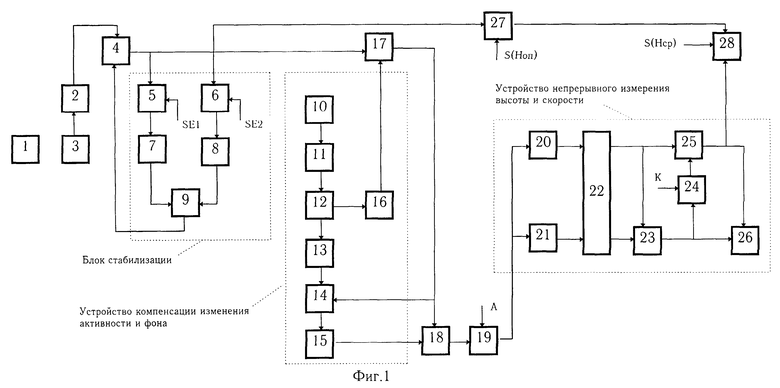
Радиоизотопный высотомер, содержащий источник излучения, связанные последовательно реперный источник излучения, сцинтилляционный блок детектирования, регистрирующий гамма-излучение реперного источника излучения и обратно рассеянное от подстилающей поверхности гамма-излучение, и фотоприемник, а также преобразователь частотного сигнала, исполнительное устройство, блок стабилизации, содержащий два компаратора с опорными сигналами SE1, SE2, входы которых соединены с выходом фотоприемника, а выходы - с входами соответствующих диодных интенсиметров с различающимися в два раза коэффициентами преобразования, выходы диодных интенсиметров соединены с входами блока вычитания, выход которого подключен к второму входу фотоприемника, первый вход которого соединен с выходом сцинтилляционного блока детектирования, отличающийся тем, что в него введены устройство компенсации изменения активности источника излучения и фона, состоящее из последовательно соединенных формирователя начальной задержки, измерителя сигнала реперного источника излучения, вычислителя сигнала компенсации изменения активности источника излучения, формирователя интервала времени измерения сигнала фона, формирователя сигнала компенсации фона, выходного формирователя, а также буферного регистра, вход которого соединен с вторым выходом вычислителя сигнала компенсации изменения активности источника излучения, а выход - с входом управляемого кодом делителя частоты, второй вход которого соединен с выходом фотоприемника, а выход - с вторым входом формирователя сигнала компенсации фона и с входом преобразователя частотного сигнала, второй вход которого соединен с выходом выходного формирователя, а также нормализатор сигнала, частотный компаратор и устройство непрерывного измерения высоты и скорости, включающее в себя два скользящих интегратора с различающимися в m раз временами усреднения, линеаризирующий кодовый преобразователь, вычитатель, сумматор, умножитель и регистратор высоты и скорости, при этом скользящие интеграторы имеют общий вход, подключаемый к выходу нормализатора сигнала, первый вход которого подключен к выходу преобразователя частотного сигнала, а на второй вход подан опорный сигнал, выходы скользящих интеграторов подключены к первому и второму входам линеаризирующего кодового преобразователя, первый выход которого подключен к первым входам вычитателя и сумматора, а второй выход подключен к второму входу вычитателя, выход которого подключен к первому входу умножителя, на второй вход которого подается опорный сигнал, выход подключен к второму входу сумматора, выход которого подключен к первому входу регистратора высоты и скорости, второй вход которого подключен к выходу вычитателя, и к первому входу исполнительного устройства, второй вход которого подключен к выходу частотного компаратора, первый вход которого подключен к выходу фотоприемника, а на второй вход подан опорный сигнал, на третий вход исполнительного устройства подается опорный сигнал.
| Фотонный измеритель высоты "Кактус" | |||
| Каталог выставки "Высшая школа России и конверсия" | |||
| - М.: ГК РФ по высшему образованию, 1993, с.243 | |||
| Electronics, 1967, 33, N 2, с.37 | |||
| Авиационная промышленность, 1967, N 9, с.49-51 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАРУШЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЛЕГКИХ | 1990 |
|
RU2024020C1 |
| FR 2073450 A, 05.11.71 | |||
| МНОГОКАНАЛЬНАЯ СИСТЕМА СВЯЗИ С ОРТОГОНАЛЬНЫМИ СИГНАЛАМИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2005 |
|
RU2275745C1 |
