Данное изобретение относится к области радиационного приборостроения, а именно к управляемым импульсным рентгеновским приборам.
Способ определения малых высот и рентгеновский высотомер могут применяться на борту летательных аппаратов различного типа при заходе на посадку или полете на малых высотах.
Известны способы измерения малых высот и рентгеновские высотомеры малых высот, разработанные в США и России и описанные в работах [1] и [2].
Измерение высоты в [1] основано на активной локации подстилающей поверхности (ПП) импульсами рентгеновского излучения, генерируемыми рентгеновским передатчиком (РП). Обратнорассеянное излучение регистрируется сцинтилляционными блоками детектирования. Высотомер, описанный в [1], содержит РП - генератор рентгеновских импульсов с трубкой триодного типа, пластмассовый сцинтиллятор с быстрым фотоэлектронным умножителем (ФЭУ) и устройство для регулирования частоты следования импульсов. Недостатками такого типа высотомеров являются небольшой диапазон измеряемых высот, требование обязательной стабилизации приемопередающего тракта по первичному излучению, а также зависимость измеряемого значения высоты от типа ПП.
Способ измерения малых высот, описанный в [2], основан на выделении максимума обратнорассеянных рентгеновских квантов, регистрируемых детектором. Формируется пара стробов длительностью по 10 нс каждый, смещенных друг относительно друга на 15 нс. Сканируя измеряемый диапазон высот парой стробов, осуществляют захват и сопровождение максимума обратнорассеянного подстилающей поверхностью сигнала. Высотомер, реализующий этот способ, содержит РП, блок детектирования (БД), формирователь импульсов, линию задержки, ключи, интеграторы и дискриминаторы. Недостатками этого способа и соответствующего высотомера являются:
- значительная вероятность пропуска ПП;
- вероятность срыва сопровождения ПП, приводящая к необходимости повторного сканирования всего диапазона с целью захвата ПП;
- невысокая точность измерения высоты, связанная с формой обратнорассеянного ПП сигнала и регистрацией его только одним стробом.
Наиболее близким по технической сущности к предлагаемому техническому решению является способ измерения малых высот и устройство для его осуществления, описанные в патенте РФ [3]. Способ измерения высоты основан на дискретно следящей системе и устройстве динамического стробирования. Для этого с помощью рентгеновского передатчика облучают поверхность импульсами зондирующего излучения с фиксированной частотой следования F и длительностью τ стр. Обратнорассеянные воздушной средой и подстилающей поверхностью рентгеновские кванты регистрируют сцинтилляционным блоком детектирования. Весь диапазон высот разбивают на виртуальные стробы, формируют информационную гребенку из трех прилегающих друг к другу стробов одинаковой длительности и определяют их положение на временной оси. По положению гребенки на временной оси следят за направлением движения относительно поверхности отражателя и сдвигают ее в ту или иную сторону на τ стр. В каждом из трех стробов гребенки регистрируют количество рассеянных квантов N1, N2, N3. Для придания системе измерения устойчивости значения N1, N2, N3 умножают на эмпирические коэффициенты k1, k2, k3, подобранные специальным образом. При движении относительно отражателя (вверх или вниз) максимум рассеянного сигнала будет смещаться соответственно в область соседних стробов. Соотношения значений k1N1, k2N2, k3N3 будут меняться, что служит сигналом, по которому сдвигают информационную гребенку на время, равное длительности одного строба τ стр в ту или иную сторону. Тогда при любом движении (вверх или вниз) максимум пика рассеянного сигнала будет находиться во 2-м стробе (центральном) на данный момент времени. Этот строб и является носителем информации о высоте. Числовое значение высоты определяют по величине задержки 2-го строба гребенки относительно импульса рентгеновского передатчика (т.е. по его положению или номеру m на шкале виртуальных стробов).
Этот строб отстоит от момента излучения зондирующего импульса на время с(m-1)τ стр/2, с учетом этого высота вычисляется по формуле
Н=с(m-1)τ стр/2+tgθ (kmNm_-km+1Nm+1)/(kmNm_+km+1Nm+1),
где с - скорость света, τ стр - длительность строба, m - номер центрального строба гребенки на шкале виртуальных стробов, km, km+1 - эмпирические коэффициенты, θ - угол наклона калибровочной кривой gm.
gm=(kmNm_-km+1Nm+1)/(kmNm_+km+1Nm+1),
Калибровочные кривые снимают экспериментально, в пределах длительности одного строба существует близкая к линейной зависимость, позволяющая использовать тангенс наклона кривой для вычисления точного значения высоты.
Высотомер, реализующий данный способ, состоит из рентгеновского передатчика, блока детектирования, формирователя стробов, соединенного с одной из двух линий задержки, трех схем совпадений, трех счетчиков и вычислителя. Две линии задержки соединены между собой, одна из них выполнена управляемой, а другая - многоотводной. Три выхода многоотводной линии соединены с первыми входами трех схем совпадения, вторые входы которых соединены с выходом блока детектирования, а входы трех схем совпадений соединены соответственно с тремя счетчиками, которые подключены к входу вычислителя, а его выход соединен с управляющим входом управляемой линией задержки.
Недостатками известных технических решений являются:
- вероятность незахвата ПП при включении высотомера на высоте, лежащей внутри диапазона измерения т.е. при Н<Нmах;
- вероятность срыва сопровождения, присущая в той или иной степени любой следящей системе;
- невысокая точность измерения высоты, обусловленная нелинейностью рабочей области калибровочной кривой.
Задачей предлагаемых технических решений является повышение точности определения высоты и надежности высотомера.
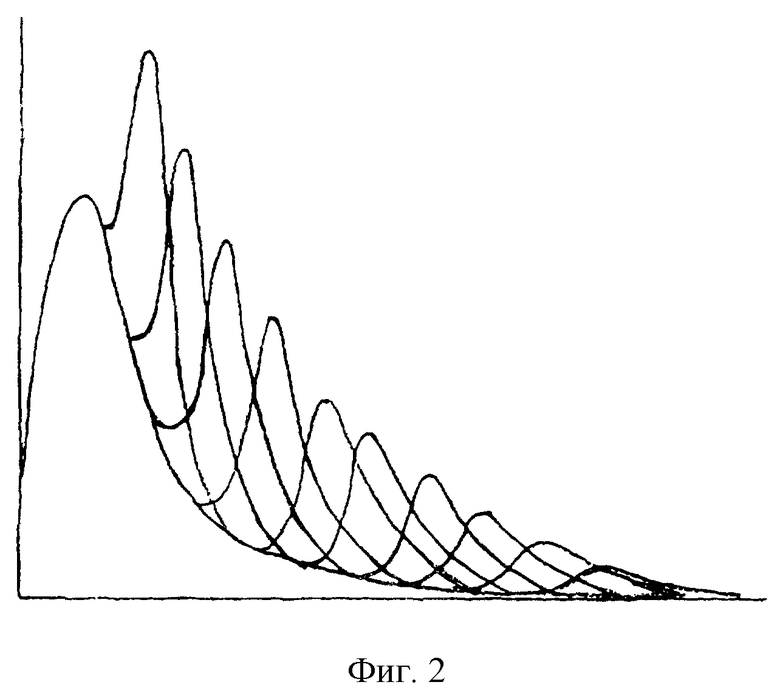
Поставленная задача решается тем, что с помощью рентгеновского передатчика облучают ПП импульсами зондирующего излучения с фиксированной частотой следования F и длительностью τ зи. Обратнорассеянные воздушной средой и ПП рентгеновские кванты регистрируют сцинтилляционным БД. Носителем информации о высоте является временное распределение (временной спектр) обратнорассеянного импульсного рентгеновского излучения. Для получения временного спектра, его стробирования, интегрирования его частей и извлечения информации о высоте весь диапазон измеряемых высот от 0 до Нmах перекрывают k стробами одинаковой длительности τ стр, прилегающими вплотную друг к другу, (что соответствует интервалу высот протяженностью kcτ стр/2, с - скорость света). Осуществляют привязку этих стробов к временной оси, положение нуля которой связано с началом испускания рентгеновского зондирующего импульса, в каждом стробе подсчитывают количество зарегистрированных БД импульсов за такт накопления N1, N2,... ,Nk. При этом БД осуществляет регистрацию обратнорассеянных рентгеновских квантов в однофотонном счетном режиме.
Условие однофотонного режима регистрации означает, что из всех рентгеновских квантов, излученных РП в одном зондирующем импульсе, БД зарегистрирует с вероятностью, не выше заданной, не более одного кванта, рассеянного подстилающей поверхностью или воздушной средой. В связи с наличием небольшого (единицы - десятки наносекунд) мертвого времени БД вероятность регистрации квантов, рассеянных на меньших расстояниях от РП и БД, оказывается выше, чем квантов, рассеянных на больших расстояниях. Поскольку из двух рентгеновских квантов, обусловленных рассеянием из одного зондирующего импульса и попавших на чувствительную поверхность БД, будет зарегистрирован только первый, прошедший более короткий путь РП - Рассеиватель - БД, картина временного распределения будет искажена. При соблюдении однофотонного режима регистрации характер полученного временного распределения обратнорассеянного сигнала не искажается.
Предварительно (на этапе настройки высотомера) получают калибровочные кривые. Для этого высотомер устанавливают на фиксированную высоту H1, которую с высокой степенью точности измеряют метрологически аттестованными средствами измерения (точность измерения существенно превосходит заданную точность измерения рентгеновского высотомера) и осуществляют подсчет числа импульсов, накопленных во всех k стробах диапазона измерения. На основе полученных k значений Ni; (i=1,2,... ,k) для каждой пары соседних (прилегающих друг к другу) стробов: 1-2, 2-3, 3-4,... , m-(m+l),... (k-l)-k подсчитывают значения gm (H1) по формуле
gm(H1)=(Nm(H1)_-Nm+1(H1))/(Nm(H1)_+Nm+1(H1)).
Таким образом получают координаты первых точек (в осях g - Н) на фиксированной высоте H1 для построения каждой калибровочной кривой. Далее высотомер устанавливают на высоту Н2 и повторяют выше описанную процедуру, получая координаты вторых точек всех калибровочных кривых. В общем случае на высоте Нi получаем координаты i-x точек:
gm(Hi)=(Nm(Hi)_-Nm+1(Hi))/(Nm(Hi)_+Nm+1(Hi)). (1)
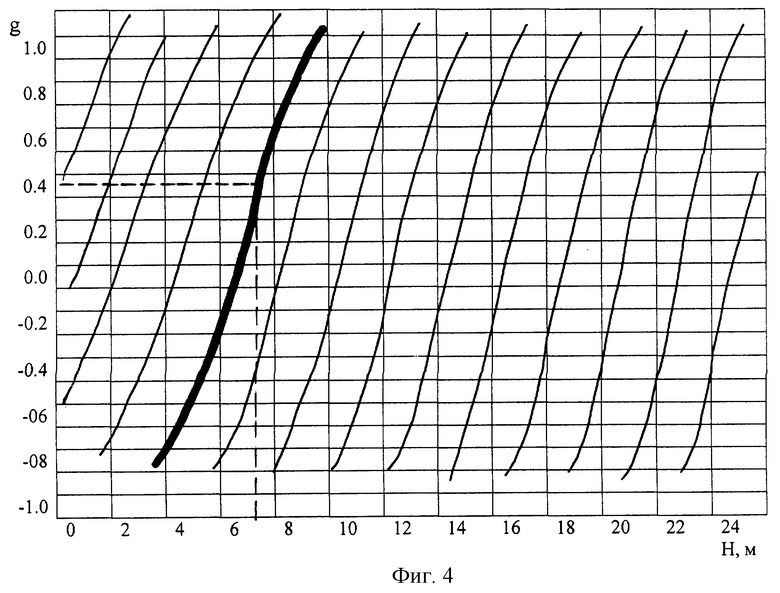
Шаг изменения высоты между соседними фиксированными точками обычно составляет единицы сантиметров, таким образом, во всем диапазоне измерения каждая калибровочная кривая строится по точкам, число которых в зависимости от шага и величины диапазона варьируется от нескольких сотен до единиц тысяч штук. Каждая калибровочная кривая gm отражает зависимость от высоты соотношения числа импульсов, подсчитанных по формуле (1), накопленных в паре соседних стробов с номерами m и m+1.
В качестве рабочих участков калибровочных кривых выбирают те, которые соответствуют высотам, на которых осуществляется переход максимума пика сигнала, отраженного от подстилающей поверхности, из одного строба данной пары в другой. На высотах, не отвечающих этому требованию, значения g этой калибровочной кривой остаются практически постоянными и определяются характером временного распределения сигнала “чистого” воздуха. Поскольку рабочие участки калибровочных кривых пересекаются, для определения высоты выбираются их части с максимальной крутизной, что приводит к минимизации погрешности измерения высоты, связанной с характером задания калибровочных кривых.
Для определения высоты необходимо выявить стробы, содержащие максимум обратнорассеянного сигнала. Для этого предварительно нужно получить информацию о временном распределении обратнорассеянного излучения только от окружающей среды, его называют спектром “чистого” воздуха. Такое статистическое распределение получают экспериментально на высотах, существенно превышающих верхнюю границу диапазона измерения, при этом вероятность регистрации кванта, рассеянного ПП практически равна нулю. Для этого высотомер размещают на высоте, значительно превышающей верхнюю границу диапазона измерения, облучают импульсами зондирующего излучения поверхность отражателя, осуществляют подсчет числа импульсов во всех k стробах диапазона измерения N1, N2,... ,Nk за время накопления и строят гистограмму полученного распределения. При этом время накопления целесообразно выбирать значительно большим продолжительности такта накопления информации для получения лучшей статистики. На основании полученного распределения вычисляют пороговые значения n
На основании подсчитанных импульсов за такт накопления принимают решение о том, находится ли объект на высоте, принадлежащей диапазону измерения, или текущее значение высоты превышает верхнюю границу заданного диапазона. Для этого сравнивают полученные значения N1, N2,... ,Nk с заданными пороговыми значениями n
Ni-ninпор&γτ;0 (2)
Если неравенство (2) выполняется хотя бы для одного значения i, сигнал лежит внутри диапазона измерения, тогда выявляют номер строба m, в котором лежит его максимум обратнорассеянного сигнала. Для этого вычисляют значения коэффициентов μ i=Ni/n
После этого вычисляют функционал Gm, который является ординатой кривой gm, по формуле
Gm=(Nm+1-Nm)/(Nm+1+Nm),
где Nm и Nm+1 - число импульсов, накопленных в стробах с порядковыми номерами m и m+1 соответственно, и определяют значение высоты, соответствующее Gm, т.е. на калибровочной кривой gm находят точку, соответствующую численному значению функционала (ординате), а ее абсцисса и будет показывать искомое значение высоты Н.
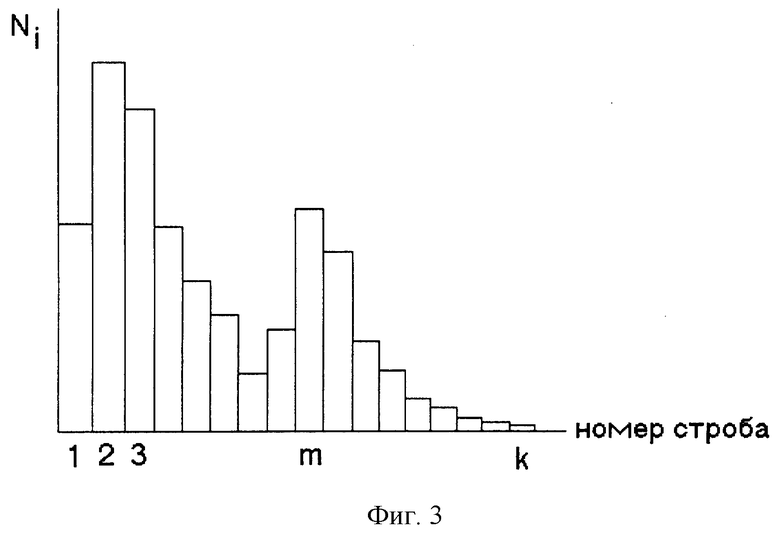
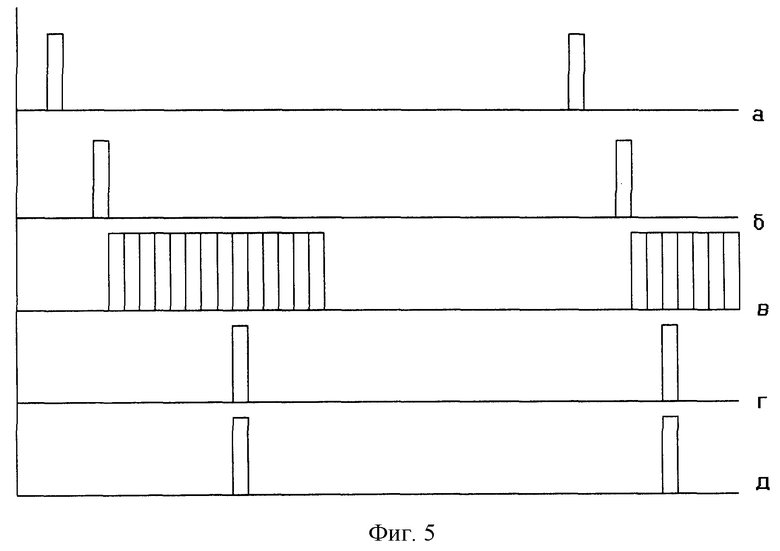
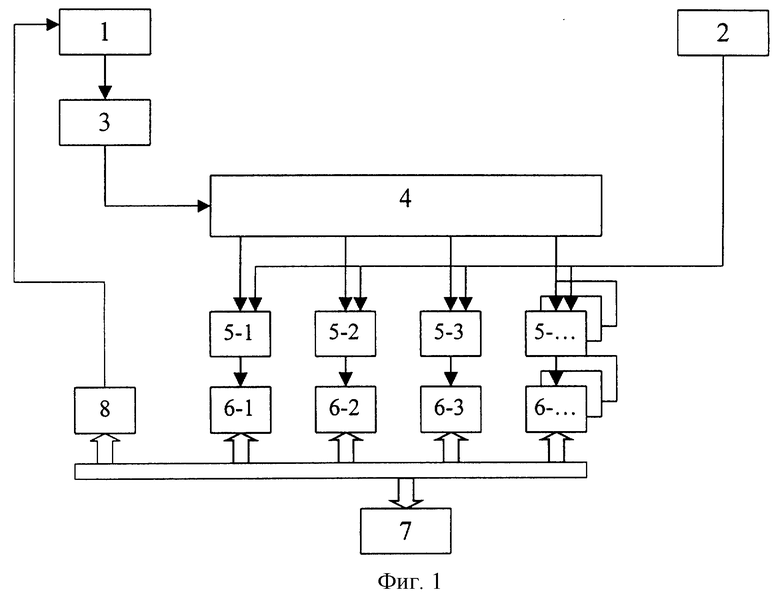
На фиг.1 представлена структурная электрическая схема высотомера; на фиг.2 - временные спектры обратнорассеянного излучения, экспериментально полученные на нескольких фиксированных высотах в области малых (до 30 м высот); на фиг.3 - гистограмма временного спектра, полученного на фиксированной высоте Н (Н<Нmах) после стробирования во всем диапазоне измерения от 0 до Нmax; на фиг.4 - семейство калибровочных кривых gm; на фиг.5 - временные диаграммы, поясняющие работу высотомера.
Рентгеновский высотомер (фиг.1) содержит рентгеновский передатчик 1, блок детектирования 2, формирователь строба 3, многоотводную линию задержки 4, k схем совпадений 5-1, 5-2,... , 5-k, k счетчиков 6-1, 6-2,... , 6-k и вычислитель 7. Вход формирователя стробов соединен с синхронизирующим выходом передатчика, а выход - с входом многоотводной линией задержки. Первые входы k схем совпадений соединены с соответствующими выходами линии задержки, а вторые - с выходом блока детектирования. Входы k счетчиков соединены с выходами соответствующих k схем совпадений, а их выходы - с вычислителем для определения высоты.
Для точного определения высоты во всем диапазоне необходимо поддерживать на заданном уровне вероятность однофотонного режима регистрации. Это может быть осуществлено путем изменения частоты F следования зондирующих импульсов рентгеновского передатчика. По мере приближения к ПП интегральный поток обратнорассеянного излучения возрастает обратно пропорционально квадрату расстояния, поэтому при неизменном значении квантового выхода РП необходимо увеличивать частоту зондирования с целью уменьшения количества рентгеновских квантов, излучаемых за время действия одного импульса. Для этого в вышеописанный высотомер может быть дополнительно установлен управляемый генератор 8, задающий частоту зондирования РП, на вход которого при достижении заданной высоты из вычислителя высотомера поступает сигнал на переключение частоты. Выход генератора соединен с входом рентгеновского передатчика.
В принципе, в состав импульсного рентгеновского передатчика уже входит задающий генератор. Однако существуют различные способы его запуска. В тех случаях, когда не требуется подстройка или изменение значения частоты импульсов, задающие генераторы рентгеновских передатчиков выполняются без управляющего входа “Внешняя синхронизация” или “Внешний запуск” и работают на фиксированной частоте. В других случаях такой вход предусматривается. В ряде моделей предусматривается ручное переключение с возможностью выбора нескольких фиксированных частот. За счет дополнительно установленного программно-управляемого генератора можно реализовать автоматическое изменение частоты следования зондирующих импульсов РП в процессе работы высотомера.
Рентгеновский высотомер (фиг.1) работает следующим образом. Рентгеновский передатчик 1 облучает подстилающую поверхность наносекундными импульсами зондирующего излучения с фиксированной частотой следования (фиг.5, а). Сцинтилляционный блок детектирования 2 осуществляет регистрацию обратнорассеянного ПП и окружающей воздушной средой излучения. Параметры РП и БД подобраны так, что обеспечивают однофотонный режим регистрации.
Таким образом, в результате испускания одного зондирующего импульса возможно появление сигнала лишь в одном из сформированных стробов (фиг.5, д). Такт накопления информации устанавливается в зависимости от требований, предъявляемых к точности измерения высоты и вертикальной составляющей скорости. Это обусловлено характерными вертикальными скоростями захода на посадку самолетов, вертолетов или иных летательных аппаратов.
Синхроимпульс РП, жестко привязанный к моменту начала испускания импульса зондирующего излучения, осуществляет запуск формирователя строба 3 (фиг.5, б). Сформированный строб-импульс поступает на многоотводную линию задержки 4, имеющую k выходов, где формируются k примыкающих друг к другу стробов равной длительности N1, N2,... , Nk (фиг.5, в). Стробы поступают на первые входы k схем совпадений 5-1, 5-2,... , 5-k, последовательно открывая их на время действия соответствующего строба, тем самым осуществляя временную селекцию сигналов БД, поступающих на вторые входы схем совпадений (фиг.5, г).
Появление сигнала возможно лишь в одном из стробов. Отселектированный сигнал поступает на вход одного из k счетчиков 6-1, 6-2,... , 6-k. Накопление сигналов в счетчиках осуществляется в течение такта накопления, после чего информация со счетчиков считывается вычислителем 7 для определения высоты, счетчики обнуляются и начинается следующий аналогичный процесс накопления. Таким образом, в вычислителе образуется информация в виде гистограммы временного распределения обратнорассеянного сигнала (фиг.3), при этом распределение оказывается проинтегрированным в пределах действия каждого из стробов в течение такта накопления.
На этапе настройки в вычислитель для определения высоты записывают информацию о временном распределении обратнорассеянного излучения, обусловленным рассеянием только от окружающей воздушной среды, его называют спектром “чистого” воздуха. На основании этой информации предварительно вычисляются пороговые значения n
Поиск максимума полезного сигнала позволяет осуществлять определение высоты из любой точки диапазона или выдавать сигнал о превышении текущего значения высоты граничного значения Нmах без априорной информации о первоначальном положении объекта, на борту которого размещен высотомер.
После определения номера m строба осуществляется вычисление функционала Gm=(Nm+1-Nm)/(Nm+1+Nm). Значения функционалов и соответствующие им значения высот (калибровочные кривые) предварительно построены и записаны в вычислителе для определения высоты.
По вычисленному значению Gm вычислитель определяет соответствующее ему значение высоты, последовательно выполняя следующие операции.
1. Определение соседних точек на калибровочной кривой gm, удовлетворяющих условию Gm р<Gm<Gm р+1;
Калибровочные кривые gi заданы в виде множеств дискретных значений (точек, определенных парой координат Gi p и Hi р). Очевидно, что вычисленное значение Gm в общем случае может не совпасть ни с одним из заданных значений Gm p. Существуют различные способы сопоставления значения Н вычисленному значению Gm.
2. Определение по калибровочной кривой gm интервала высот, лежащих между значениями Нm р и Нm p+1, соответствующих значениям Gm р и Gmp+1, в этом интервале лежит вычисляемое значение высоты Н, такое, что Нm р<H<Hm p+1;
3. Точное вычисление значение высоты Н. (Возможны различные варианты реализации, вариант “с” является наиболее точным, но требует больших вычислительных ресурсов);
а. Выбор ближайшего фиксированного значения:
Н=Нm р, если |Gm-Gm p|<|Gm-Gm p+l| или
H=Hm p+l, если|G-Gm p|>|Gm-Gm p+l|
b. Выбор среднего значения:
Н=0,5(Hm p+Hm p+1)
с. Использование метода сплайн-интерполяций, см., например, [5].
Предлагаемый рентгеновский высотомер для измерения малых высот может быть реализован следующим образом. Модулятор рентгеновского передатчика обеспечивает его работу в импульсном режиме с частотой следования зондирующих импульсов F1=100 кГц, F2=1 МГц и длительностью τ зи=10 не на половине амплитуды интенсивности, при этом квантовый выход РП составляет 1012-1013 квантов в секунду, их средняя энергия 60 кэВ, максимальная - до 100-120 кэВ. Диаграмма направленности РП - 2ψ =80°. Количество стробов 20, длительность τ стр 10 нс. Импульсы, прошедшие схемы совпадений, поступают на программируемые таймеры (счетчики) и далее в вычислитель. Такт накопления информации составляет от 20 до 100 мс. Вычислитель представляет собой высокопроизводительный персональный компьютер или одноплатную ЭВМ. Связь с вычислителем осуществляется по RS-232 или RS-485.
Вычислитель (в соответствии с записанной в него программой с помощью заранее вычисленных пороговых значений определяет номер строба m, в котором находится максимум сигнала, и вычисляет функционал Gm, после чего по калибровочной кривой с номером m определяет значение высоты. Например, максимум сигнала находится в 5-м стробе. Функционал G5=0,388. Тогда вычисление значение высоты Н осуществляется следующим образом (способом выбора ближайшего фиксированного значения: на 5-й калибровочной кривой ближайшими соседними значениями к ординате 0,388 являются 0,380 и 0,390. Им соответствуют абсциссы (значения высот) 710 и 712 см. Поскольку |0,390-0,388|<|0,380-0,388|, следовательно, выбирается значение высоты 712 см.
Далее вычислитель выдает значение высоты в контур управления летательного аппарата или на табло индикатора высоты в режиме ручного пилотирования.
Информация о текущем значении высоты позволяет легко вычислить значение вертикальной составляющей скорости, например, по формуле Vвертик.=(Н(t2)-H(t1))/(t2-t1), где t1 и t2 - моменты времени измерения текущего значения высоты. Измерение вертикальной скорости позволяет легко позволяет свести к минимуму динамическую ошибку измерения высоты.
Характеристики РП и БД позволяют за такт накопления накопить достаточную статистику для реализации предложенного алгоритма, а высокое быстродействие вычислителя обеспечивает выдачу информации в режиме реального времени. Вычислитель вырабатывает сигналы, управляющие работой высотомера. Устройство высотомера исключает вероятность незахвата ПП или сбой вычисления высоты за счет одновременного анализа сигнала во всем диапазоне измерения высот. Более высокая точность измерения достигается за счет одновременной обработки информации во всем диапазоне измерения высот и использования алгоритмов, учитывающих нелинейный характер рабочих областей калибровочных кривых.
Предложенная система в отличие от следящих систем является абсолютно устойчивой и надежной, поскольку в ней реализован одновременный анализ временного распределения обратнорассеянного импульсного излучения во всем диапазоне измерения, а не в заданной его части. При этом возможно использовать алгоритмы совместного обнаружения и оценивания параметров, которые существенно повышают точность измерения высоты и вертикальной составляющей скорости (скорости сближения), что в результате приводит к повышению точности и надежности высотомера.
Дополнительным преимуществом устройства с генератором является повышение точности измерения за счет исключения ошибок, появляющихся вследствие нарушения однофотонного режима регистрации в области малых высот.
Источники информации
1. Nucleonics in Aerospace Proceed 2 Symp. NV, 1968, pp.365-369.
2. Герчиков Ф.Л. Управляемое импульсное рентгеновское излучение в приборостроении. М.: Энергоатомиздат., 1987, с.57-58.
3. Патент Российской федерации № 2032919 на изобретение “Способ измерения малых высот и устройство для его осуществления”.
4. Городецкий А.Я. Статистический анализ и синтез фотонных систем. СПб.: СПбГТУ, 1996, с.134-136.
5. Завьялов Ю.С., Квасов Б.И., Мирошниченко В.Л. Методы сплайн-функций. М.: Наука, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032919C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БОЛЬШИХ ВЫСОТ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОЛЬШИХ ВЫСОТ | 1993 |
|
RU2072530C1 |
| СПОСОБ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО МНОГОФУНКЦИОНАЛЬНОЙ РЕНТГЕНОВСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2772687C1 |
| РАДИОИЗОТОПНЫЙ ВЫСОТОМЕР | 1997 |
|
RU2128849C1 |
| Способ определения плотности атмосферы на высотах Е-слоя ионосферы | 1990 |
|
SU1732310A1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| Досмотровая установка и способ распознавания вещественного состава досматриваемого объекта | 2022 |
|
RU2788304C1 |
| ВЫСОТОМЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2253880C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
| РАДИОИЗОТОПНЫЙ ВЫСОТОМЕР | 1996 |
|
RU2105322C1 |
Предлагаемое изобретение относится к области радиационного приборостроения, а именно к управляемым импульсным рентгеновским приборам, и может применяться на борту летательных аппаратов различного типа при заходе на посадку или полете на малых высотах. Достигаемый технический результат заключается в повышенной точности и надежности системы, осуществляющей анализ временного распределения обратнорассеянного излучения во всем диапазоне измеряемых высот в режиме реального времени. Способ определения малых высот заключается в том, что поверхность отражателя облучают импульсами рентгеновского излучения с фиксированной частотой и длительностью, обратнорассеянное излучение регистрируют. Для получения временного спектра и его анализа перекрывают весь диапазон определяемых высот стробами одинаковой длительности, привязывают их к временной оси и в каждом стробе подсчитывают количество зарегистрированных импульсов N1, N2,...,Nk за такт накопления. Предварительно вычисляют пороговые значения n
| СПОСОБ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032919C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БОЛЬШИХ ВЫСОТ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОЛЬШИХ ВЫСОТ | 1993 |
|
RU2072530C1 |
| RU 96123110 A, 27.08.1998 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАРУШЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ЛЕГКИХ | 1990 |
|
RU2024020C1 |
| МНОГОКАНАЛЬНАЯ СИСТЕМА СВЯЗИ С ОРТОГОНАЛЬНЫМИ СИГНАЛАМИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2005 |
|
RU2275745C1 |
